六自由度植牙手术机器人设计及动态特性分析
2017-09-21 02:03:23张顺心王晓东尹立轶马志广韩立
河北工业大学学报 2017年4期
张顺心,王晓东,尹立轶,马志广,韩立
(1.河北工业大学机械工程学院,天津300130;2.天津医科大学医学影像学院,天津300203)
六自由度植牙手术机器人设计及动态特性分析
张顺心1,王晓东1,尹立轶1,马志广1,韩立2
(1.河北工业大学机械工程学院,天津300130;2.天津医科大学医学影像学院,天津300203)
植牙手术机器人将是医疗外科手术领域一个全新的突破,但是现有植牙手术机器人结构繁杂,末端缺乏灵活性,难以顺利地实现口腔内的钻孔操作.紧密结合植牙手术要求,设计了一种结构更加紧凑、末端灵活性更高地六自由度植牙手术机器人.然后建立了植牙手术机器人的有限元模型,利用ANSYS Workbench分析其动态特性,主要包括模态分析和谐响应分析,其中模态分析得到了植牙手术机器人固有频率,谐响应分析得到了植牙手术机器人的结构在频率105 Hz和844 Hz处容易发生共振,为工况下防止出现共振现象提供了重要的科学依据.
植牙手术机器人;结构设计;动态特性;模态分析;谐响应分析
0 引言
调查显示中国人口的牙齿患病率高达68%,其中需要进行牙齿种植的病人也在逐年上升,传统植牙手术中,牙医手持种植机凭借着自己的经验对病人进行牙齿种植,这使得手术的精度大受影响,另外,牙医在手术中的手颤也会提高手术的失败率[1].
机器人技术在医疗手术领域的应用,一定程度上减少了手术创伤、消除了手颤、提高了手术精度[2].植牙手术机器人的主要目的是完成在牙槽骨上的钻孔操作,与一般钻孔的最大区别在于植牙手术机器人的末端钻孔系统的运动受限于口腔空间的大小.
目前,国外在植牙手术机器人领域的研究有了一定的发展,最具代表性地就是美国老道明大学Sun等人构建的图像引导的自动义齿种植机器人系统,但总体上处在实验阶段,还未应用于临床,由于其末端钻孔系统的灵活性不足,对于口腔这种狭小空间内的钻孔操作很难完成;国内单纯在植牙手术方面的机器人还没有.
植牙钻孔比较特殊,这对植牙手术机器人的结构提出了更多的要求,主要有:
1)口腔边缘容易与植牙手术机器人末端钻孔装置发生干涉,而且在对口腔内的后牙种植时,需要预留一定的手术空间,方便医生观察操作,这就要求植牙钻孔机器人的末端结构要具有更高的灵活性,换言之就是需要适当增加机器人末端结构的自由度.
2)空间较小的口腔要求植牙手术机器人的末端结构尺寸要很小,末端关节电机要后置,可利用并联机构控制精度高的优势来实现,另外在牙槽骨上的钻孔需要很高的精度,所以在增加末端钻孔系统自由度的同时需要注意其结构的紧凑型.
3)钻头在牙槽骨上钻孔需要一定的力矩和转速,这对植牙手术机器人末端钻孔系统的传动机构设计提出了更高的要求,传统微创手术机器人中的丝传动显然不能实现,研究中采用了软轴和刚性轴联合传动的方式.
本研究设计了一种六自由度的植牙手术机器人钻孔装置,主要对其结构进行了介绍,并在此基础上对其动态特性进行了分析,为植牙手术机器人结构的稳定性研究提供了重要的参考依据.
1 结构原理
由机器人学可知,对于某个旋转钻头进行定位和定向,需要5个自由度即可[3],但是人体口腔因人而异且空间较小,所以设计的植牙手术机器人末端结构需要更高的灵活性,整体结构应尽可能的紧凑、简单.根据现有种植机的尺寸大小和手术特点,设计了1种6自由度的植牙手术机器人钻孔装置,该装置与传统机器人结构的区别是在末端钻孔系统中增加了1个冗余的弯曲自由度,其平面机构简图如图1所示,其中第6个关节所代表的便是增加的冗余自由度,由于末端钻头需要在刚性轴的带动下运动,而要使刚性轴在自身高速转动的情况下还能弯曲运动,就给设计提高了难度,这也是本研究结构设计的创新之处.
植牙手术机器人结构主要由两大部分组成:机械臂和末端钻孔系统.其中机械臂主要由底座、驱动臂座、大臂、中臂、小臂、伺服电机、RV减速器、轴承等部件组成,末端钻孔系统主要由植牙特种电机、内传动机构、外传动机构、轴套、钻头等部件组成.通过SolidWorks建立植牙手术机器人的虚拟样机模型,如图2所示.其中底座高218 mm,外径260 mm,大臂轴间距320 mm,宽100 mm,大臂到小臂轴间距L=440 mm,末端钻孔系统伸直状态下总长225 mm.
传动机构是末端钻孔系统结构的主要组成部分.其中,内传动机构8安装于轴套内部,主要组成部分包括:小锥齿轮、前传动轴、前轴承、软轴、后轴承、连接轴、后传动轴,如图3所示.其中,后传动轴与植牙特种电机连接;后传动轴、连接轴、软轴以及前传动轴之间通过销钉连接,前轴承与后轴承各由两个高精密深沟球轴承组成,外部与轴套配合;前传动轴通过锥齿轮传动带动钻头运动.系统控制植牙特种电机转动,内传动机构将这种运动传递到钻头.
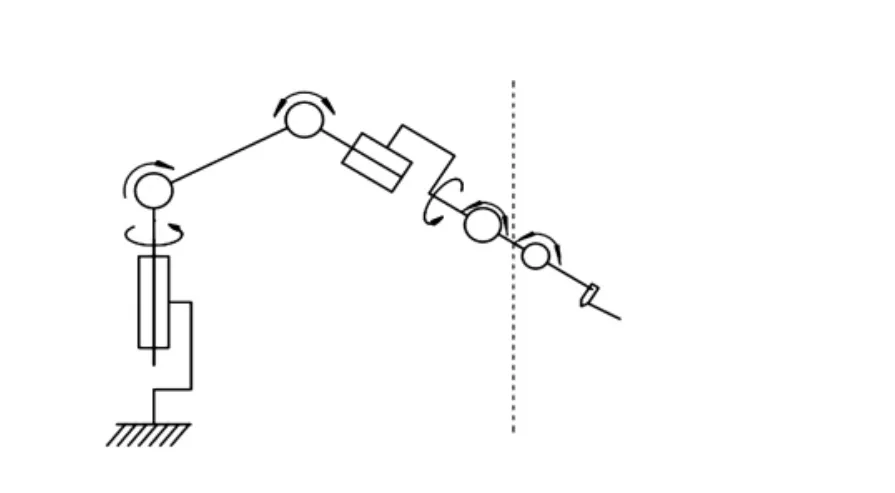
图1 机构简图Fig.1 Diagram of mechanism

图2 虚拟样机模型Fig.2 Virtual prototype model
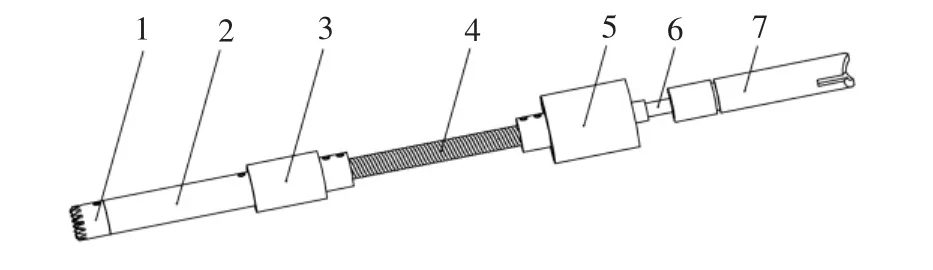
图3 内传动机构Fig.3 Internal drive mechanism
外传动采用的是由连杆2、连杆3、后曲柄4和后轴套5组成的平行四边形机构,在后轴套5的侧面设有曲柄4,在前轴套1和后轴套5的连接处设置有连杆2,且连杆2与前轴套1固定连接,曲柄4和连杆2之间通过连杆3连接在一起,前轴套另一端和机头壳相连.传动原理是伺服电机驱动平行四边形机构,平行四边形机构将转动传递给前轴套,前轴套配合软轴的作用下实现末端钻孔系统自身的弯曲运动,其结构如图4所示.
系统通过控制相应关节伺服电机的运动,使植牙手术机器人实现6个自由度的灵活运动,从而使植牙手术机器人在可达到的区域内实现任意方向的定位、定向,并精确地进行钻孔操作[4].
2 动力学方程
根据动力学理论可知,在外部载荷F(t)作用下的结构受迫振动的运动微分方程为

其中:[M]为质量矩阵;[C]为阻尼矩阵;[K]为刚度矩阵;{x¨}为节点加速度列阵;{x˙}为节点速度列阵;{x}为节点位移列阵;{F(t)}为载荷列阵.
本研究是针对于无阻尼自由振动系统,式(1)可简化为

对式(2),系统的特征方程为

其中:ω为系统的固有圆频率(rad/s),ω=2π fi;i为系统的模态频率(Hz).而在植牙手术机器人装置进行钻孔工作时钻头会受到轴向载荷和扭矩的作用,使得植牙手术机器人系统的每一阶模态频率fi(0<f1<f1<…<fi)都有可能被激活,进而导致植牙手术机器人装置发生共振响应,当振幅达到一定程度时,必然会影响牙齿种植手术的精度和质量,甚至会给病人带来创伤,因此非常有必要研究分析植牙手术机器人装置的动力学响应特性.
3 模态分析
模态分析是最基本的动力学分析,也是其它动力学分析的基础,模态分析可以帮助确定结构的固有频率和振型.如果通过模态分析搞清楚结构在某个易受影响的频率范围内,就可以预知结构在此频段内,受外界载荷作用下的实际振动响应,从而为结构设计避免共振、优化系统动态特性提供参考依据[5].
为了减轻研究的复杂程度和利于软件分析计算,在建立有限元模型前,首先要对SolidWorks建立的植牙手术机器人虚拟样机模型进行合理的模型简化.
植牙手术机器人的结构受到的外载荷主要作用在末端钻孔系统上,由于机器人执行钻孔操作时,主要是末端钻孔系统的内传动机构在高速运转,其它各关节的相对运动非常小,在简化模型时,将机械臂上各关节处的电机、减速器、轴承、关节轴等效成相应的结构钢质量块,去掉模型上螺栓、盖等小部件以及妨碍软件分析的倒角、圆角等影响甚微的小特征,另外,不考虑关节处零部件之间的摩擦、阻尼等因素的影响,假设为理想的旋转关节,本文为了突出研究的重点,针对植牙手术机器人末端钻孔系统运动的特点,主要研究外部载荷与末端钻孔系统相互作用下对机器人动态特性的影响,本设计中建立了软轴模型,是由3层钢丝与一根钢丝轴绕制而成,由于分析中软轴主要受扭转作用,可忽略各层钢丝直接的摩擦,简化好模型后就可以进行有限元模型的建立,主要过程可分为如下几步.
第1步,配置好ANSYS Workbench中与CAD软件的集成设置,将植牙手术机器人某一工况下的虚拟样机模型导入到Workbench软件的DS中做进一步的模型简化,主要是根据零部件间有没有相对运动,把没有相对运动的Body(零部件)组合成一个Part,这样可以大大节省后面添加接触的时间.接着在Engineering Data中设置材料属性,在后续Modal(模态)等动态分析时,选择相应材料施加到相应部件中即可,其中,与口腔接触的末端钻孔系统的主要零部件赋予304不锈钢材质,机械臂关节1处的主要零部件采用碳素结构钢材质,为了减轻臂部质量,关节2到关节5处的主要零部件采用的材料是6061铝材,材料属性如表1所示.
第2步,网格划分.对有限元模型进行网格划分,将连续模型离散化.采用的方法是自由划分网格方法(四面体网格为主导,六面体辅助的方法),并通过调节relevance的大小来控制网格的质量,离散后的网格化模型如图5所示,其一共包括106 693个单元,204 300个节点.
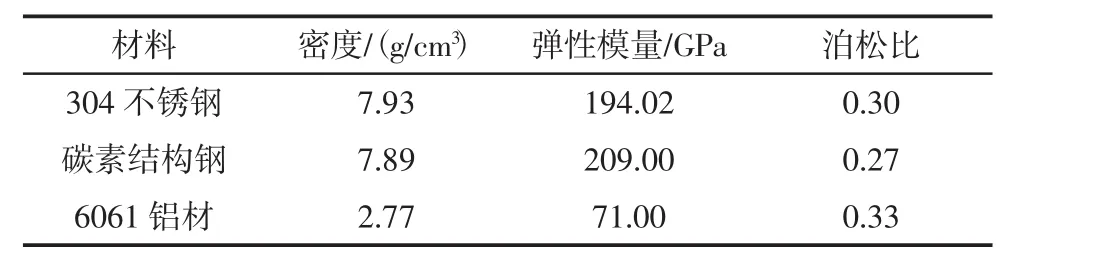
表1 材料属性Tab.1 Material properties
第3步,对模型施加边界条件和约束.针对本文研究的植牙手术机器人,与一般结构不同之处在于结构中存在许多回转铰链连接,铰链的处理直接关系到模态分析的精度,为此,在有限元建模时需要精确的处理铰链连接的模型,模态分析只对Bonded(绑定)和无分离(No Separation)线性接触有效,模态分析时添加其它非线性接触会被忽略,本研究中根据实际植牙手术机器人各零部件间的实际接触情况,在Contact设置中对铰链连接处进行Bonded或No Separation处理,这种方法处理铰链连接可以达到较好的效果.在植牙手术机器人底座上的螺纹定位孔上施加固定约束,另外,由于伺服电机的约束作用,钻孔操作时组成运动副的零部件之间相对运动非常小,在关节连接处主要设置No Separation接触(这种接触类型适用于法向无分离,切向允许小范围内滑动的接触区域),其中,与关节轴承外圈配合地方施加Bonded接触,与轴承内圈配合的位置施加No Separation接触;在大臂与驱动臂座、大臂与中臂、小臂与夹具接触的地方施加No Separation接触;在末端钻孔系统上铰链连接处施加No Separation接触;内部传动轴与轴承接触地方添加圆柱副,其中要约束其径向、轴向自由度,保留其切向自由度;其它零部件在没有相对运动的接触位置都设置成Bonded接触.
最后对植牙手术机器人的有限元模型进行求解,得到其1~8阶模态频率,如表2所示.

表2 模态频率Tab.2 Modal frequency
4 谐响应分析
谐响应分析在复杂的机械传动系统振动分析中应用十分广泛,此类旋转机构在运行过程中会产生各式各样的简谐振动,尤其是当高速旋转的主轴与外界激励载荷相互作用下的振动频率与机身的模态频率接近或者重合时会产生共振响应[5-6].对于植牙手术机器人来说,其工作过程中的振动主要是由植牙手术机器人末端钻孔系统内传动轴在电机带动下高速旋转产生的,产生的振动会对整个植牙手术机器人系统的稳定性带来很大的影响.手术中为了防止医疗事故的发生,提高手术精度和手术质量,就必须对植牙手术机器人等医疗器械的稳定性提出更高的要求.

图5 网格化模型Fig.5 Grid model
通过谐响应分析可以得到植牙手术机器人结构在某一工况(θ1=0°,θ2=115°,θ3= 90°,θ4=0°,θ5=15°,θ6=0°,θi代表相邻两连杆夹角)下的应力-频率响应和位移-频率响应曲线,以此为评估植牙手术机器人结构的动力学特性提供参考依据.激振点选在植牙手术机器人末端钻孔系统的内传动轴机构靠近钻头一端,即小锥齿轮的外表面,在此处施加切向载荷10 N[7].激励频率相对结构本身的固有频率来说,是处于一个较小的频率范围内,所以分析中一般选取低阶模态分析即可.根据模态分析得到的前8阶模态频率变化范围,将频率变化区间设置为0~1 000 Hz,求解过程设置为200个子步骤.
经过200次扫频计算,得到激振点处X、Y、Z 3个方向的应力-频率响应曲线,如图6、图7、图8所示.对比分析激振点处的应力-频率响应曲线可得,在频率105 Hz、844 Hz处会出现位移峰值,这与植牙手术机器人结构的第1、8阶模态频率几乎重合,在第1、8阶模态频率处,植牙手术机器人结构在X、Y、Z方向上都会产生较大的应力峰值,只是产生的应力峰值大小不同.以上说明植牙手术机器人结构在第1、8阶模态频率处发生共振时,会出现较大应力突变,从而对植牙手术机器人结构的强度和疲劳寿命产生很大的影响.
另外,激振点处X、Y、Z的位移-频率响应曲线,如图9、图10、图11所示,对比分析激振点处的位移-频率响应曲线可知,在频率105 Hz、844 Hz处会出现位移峰值,只是峰值大小有所区别,这与植牙手术机器人结构的第1、8阶模态频率几乎重合.这说明植牙手术机器人结构在X、Y、Z 3个方向上的振动响应对第1、8阶模态频率相对敏感,当在第1、8阶模态频率处发生共振时,X、Y、Z方向都会出现较大的位移响应,其结果直接对植牙手术的精度和质量产生较大影响.
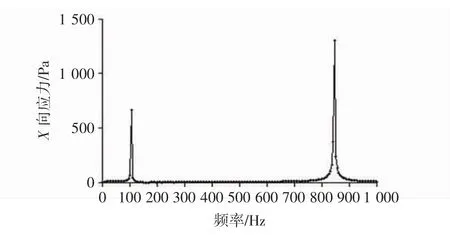
图6 X向应力-频率响应曲线Fig.6 X stress-frequency response curve
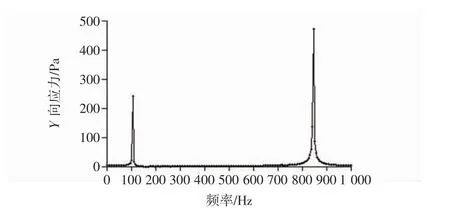
图7 Y向应力-频率响应曲线Fig.7 Y stress-frequency response curve
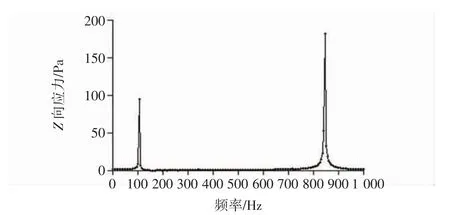
图8 Z向应力-频率响应曲线Fig.8 Z stress-frequency response curve
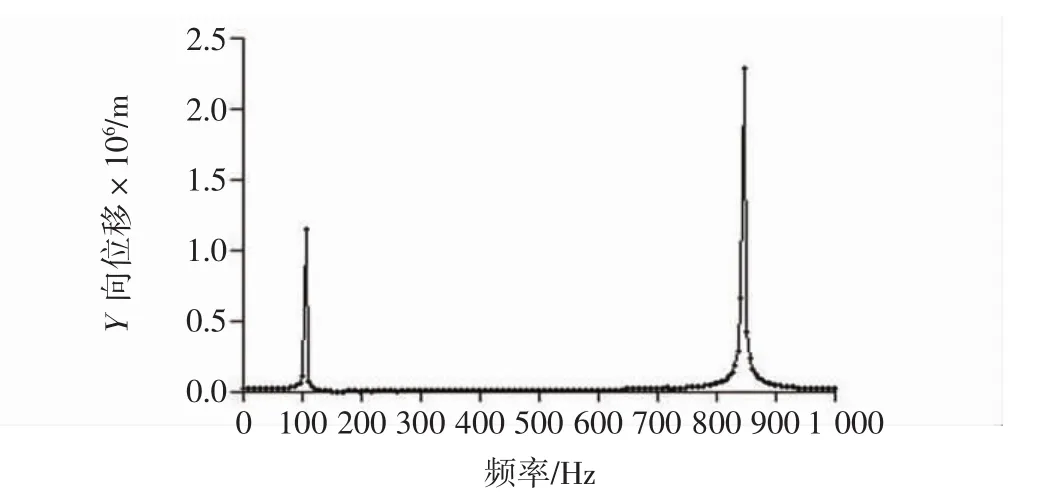
图9 X向位移-频率响应曲线Fig.9 X displacement-frequency response curve

图10 Y向位移-频率响应曲线Fig.10 Y displacement-frequency response curve
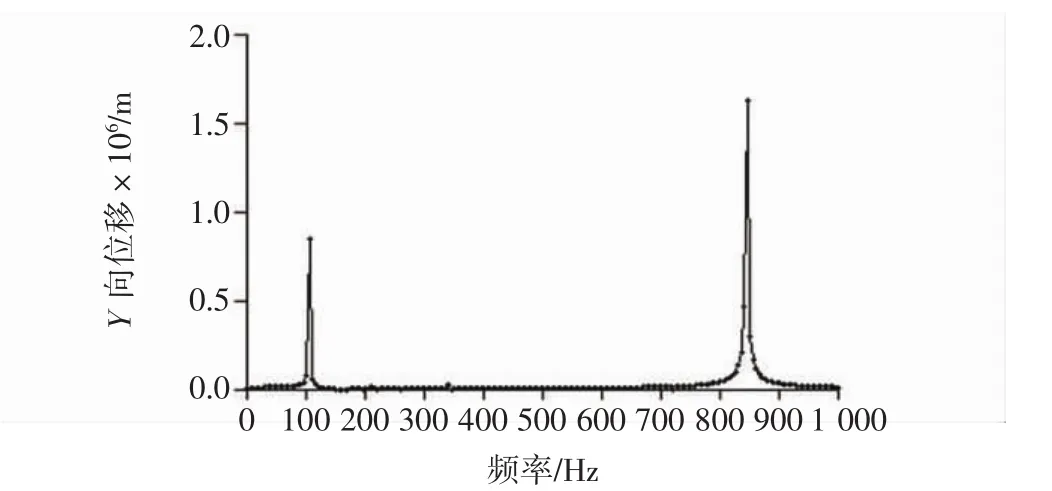
图11 Z向位移-频率响应曲线Fig.11 Z displacement-frequency response curve
5 结论
六自由度植牙手术机器人的结构设计大大提高了其末端的灵活性,使得对于口腔内的钻孔操作更加容易实现,其末端可以在狭小空间内更加灵活地对目标位置进行定位和定向操作;另外,植牙手术机器人结构的动态特性直接影响着手术钻孔的精度、质量以及手术安全性.本研究在模态分析基础上对植牙手术机器人结构进行了谐响应分析,得到了其在0~1 000 Hz频率范围内的应力-频率和位移-频率响应曲线,确定了结构在频率105 Hz和844 Hz处容易发生共振,为工况下防止其出现共振现象和植牙特种电机的转速调节提供了重要的参考依据.
[1]Jiang Jingang,Zhang Yongde,Wei Chunge,et al.A review on robot in prosthodontics and orthodontics[J].Advances in Mechanical Engineering,2015,7(1):29-42.
[2]倪自强,王玉苗,刘达.医疗机器人发展综述[J].机械工程学报,2015,51(13):46-52.
[3]蔡自兴.机器人学[M].北京:清华大学出版社,2009.
[4]Zheng G C,Gu L X,Li X B,et al.Computer-assisted preoperative planning and surgical navigation system in dental implantology[C]//6th International Special Topic Conference on ITAB,2007:139-142.
[5]Pires J N,Caramelo F J,Brito P,et al.Robotics in implant dentistry:stress/strain analysis[J].Industrial Robot,2006,33(5):73-380.
[6]梁君,赵登峰.模特分析方法综述[J].现代制造工程,2006,8(2):138-141.
[7]白文林.掘进机截割主轴振动分析[J].机械程与自动化,2016(3):85-87.
[责任编辑 田丰 夏红梅]
Design and dynamic analysis of six degree of freedom dental implant robot
ZHANG Shunxin1,WANG Xiaodong1,YIN Liyi1,MA Zhiguang1,HAN Li2
(1.School of Mechanical Engineering,Hebei University of Technology,Tianjin 300130,China;2.School of Medical Imaging, Tianjin Medical University,Tianjin 300203,China)
Implant surgery robot will be a new breakthrough in the field of medical surgery.However,the existing dental robot has complicated structure,and the end lacks flexibility,so it is difficult to realize the drilling operation in the oral cavity.In this paper,a new type of six degree of freedom robot is designed,which is more compact and more flexible.Then, the finite element model of the robot is established,and its dynamic characteristics are analyzed by using ANSYS Workbench including modal analysis and harmonic response analysis.The modal analysis obtained the implant surgery robot natural frequency,and harmonic response analysis of the structure of implant surgery robot show it resonates easily at the frequencies of 105 Hz and 844 Hz.It provides an important scientific basis for the prevention of resonance.
dental implant robot;structural design;dynamic characteristics;model analysis;harmonic response analysis
TH113.1
A
1007-2373(2017)04-0028-06
10.14081/j.cnki.hgdxb.2017.04.005
2017-02-22
天津市应用基础与前沿技术研究计划(13JCYBJC41200)
张顺心(1959-),男,教授.
猜你喜欢
装备制造技术(2020年9期)2021-01-26 00:14:50
时代汽车(2019年6期)2019-07-09 23:33:04
水电与抽水蓄能(2019年1期)2019-03-08 05:17:10
消费导刊(2018年8期)2018-05-25 13:19:34
制造技术与机床(2017年8期)2017-11-27 02:10:17
光学精密工程(2016年5期)2016-11-07 09:06:16
现代工业经济和信息化(2016年4期)2016-05-17 05:35:43
湖北经济学院学报·人文社科版(2015年8期)2015-12-29 05:53:07
电测与仪表(2015年7期)2015-04-09 11:40:32
上海电机学院学报(2015年4期)2015-02-28 14:30:00