
城郊道路路灯照明运行模式与智能控制方法研究
2017-09-20 03:40魏艳楠陈贺鹏陈雨菲刘奇明
黑龙江交通科技 2017年7期
魏艳楠,陈贺鹏,陈雨菲,何 煦,刘奇明
(河南城建学院,河南 平顶山 467000)
城郊道路路灯照明运行模式与智能控制方法研究
魏艳楠,陈贺鹏,陈雨菲,何 煦,刘奇明
(河南城建学院,河南 平顶山 467000)
基于红外感应原理,利用485通讯技术和LED照明设备,研究了一种城郊照明系统的智能控制方法。在保证行车安全的前提下,本研究设置了城郊道路照明系统的常规照明模式和动态跟踪照明控制两种模式,实现城郊道路照明系统的改进措施。
动态跟踪照明;红外感应;LED灯;智能控制;绿色照明工程
1 设计原理
1.1 总体结构
本研究通过设置城郊道路照明系统的常规照明模式和动态跟踪照明控制两种模式,来实现城郊道路照明系统的智能控制。常规照明模式包括感光控制模式和长亮模式,实现交通流量较大情况下的照明控制;动态跟踪照明控制模式,在有车辆行驶时保证其安全距离内的路灯亮起,实现交通流量较小时的动态控制,达到城郊照明系统节能控制目的。
工作系统架构主要分为两部分:常规控制系统和动态跟踪系统。在常规工作系统中由时间监测装置和感光控制系统对路灯进行控制,动态跟踪系统中由信息识别、信息储存和信息交互组成,根据道路上交通参与者检测识别和时间设置来决定是否实行“动态跟踪照明”。系统架构如图1所示。
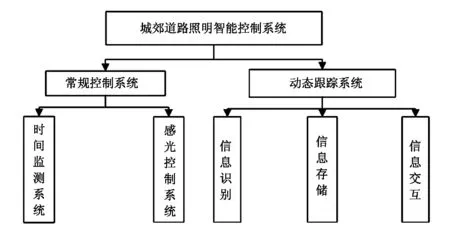
图1 总体结构图
1.2 系统流程
整个系统由时间监测装置、光照强度感应装置和红外感应装置控制,将路灯运行时间划分为不同时段段,在交通参与者较多时保持长亮,在午夜交通参与者较少的情况下实行“动态跟踪照明”。系统工作流程如图2所示。
1.3 动态跟踪原理
利用红外感应装置检测道路上的行人或者机动车辆,当检测到行人或者机动车辆时,热红外装置输出低电平信号,传输到到下位机。上位机分别读取下位机的数据,分析处理后对下位机下达命令,下位机以此控制LED灯驱动模块,进而控制LED灯动态启动,实现路面情况实时刷新,使路灯按照设计好的方案执行,动态跟踪过程如图3所示。
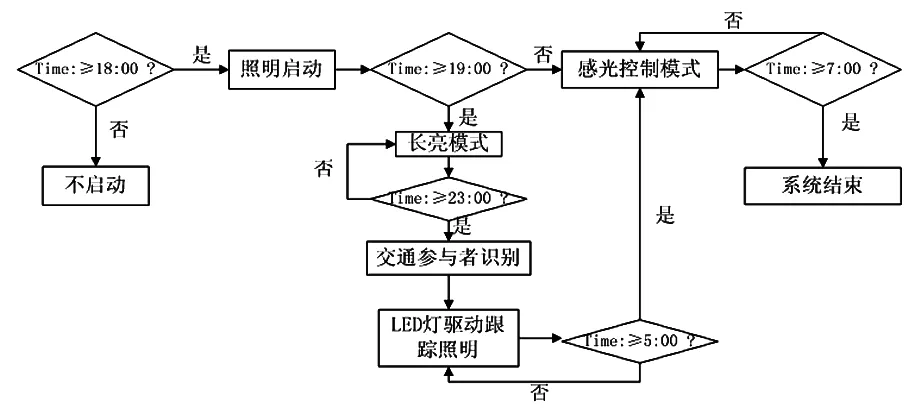
图2 系统流程图
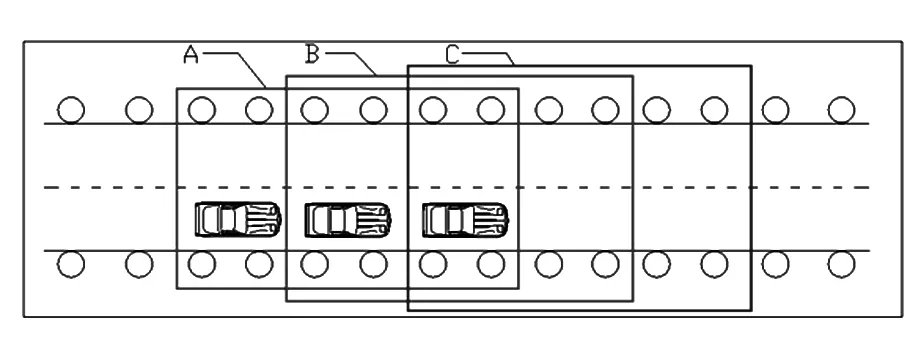
图3 “跟踪照明”运行示意图
1.4 红外感应原理
由光的波段特点可知,红外线单一光子能量小于太阳光的单一光子能量,所以对人体无害。其辐射半径为8 m,辐射角度为120°,采用两个模块组合的方法使辐射角度达到180°。灯柱间距30 m,三个组合的模块可以实现完全覆盖。若城郊道路设置了非机动车道或人行道,则可以用三个红外感应装置组合,使覆盖角度达到120°×3=360°实现无死角覆盖,如图4。

图4 红外感应组合装置示意图
1.5 照明距离的确定
当车辆行驶时,驾驶员应能够及时发现前方障碍物,或迎面开来的车辆,有足够的时间或者距离采取措施,防止车辆与障碍物或车辆与车辆相撞。以此,智能路灯系统的照明距离应满足停车视距。
查《城市道路路线设计规范》得,停车视距由反应距离、制动距离及安全距离组成,按式(1)计算

(1)
式中:V为设计速度,km/h;t为反应时间,取1.2 s;βs为安全系数,取1.2;μs为路面摩擦系数,取0.4;Sa为安全距离,取5 m;φ为纵坡度(%),上坡为“+”,下坡为“-”。
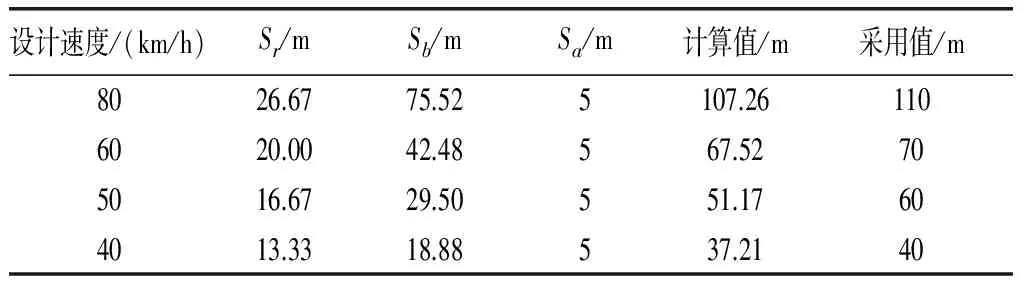
表1 不同设计车速对应的停车视距
表1所给出的停车视距为白天的停车视距。本研究主要针对城郊道路夜间路灯运行模式进行优化改进,在夜晚驾驶员视认能力下降,导致反应时间延长同时考虑司机不遵守交通规则等特殊情况,计算夜晚停车视距时取反应时间为3 s,车速取60 km/h,坡度取0.2%。则夜晚情况下城郊道路停车视距可化为

(2)
该数值取整为50.1+28.35+5=83.45 m,采用值为90 m。路灯间距为30 m,为保证行车安全,则前方应亮灯4盏。
1.6 经济性分析
目前国内路灯照明光源一般采用高压钠灯、高压汞灯和金属卤化物灯。一般功率为150 W、250 W、400 W,目前最常用的是250 W和400 W两种。

表2 LED路灯常用瓦数及灯杆高度对比表
通过对平顶山市平安大道夜间车流量进行调查,调查显示夜间车流量比较低,所以本研究具有非常大的现实意义。调查结果如表3所示。
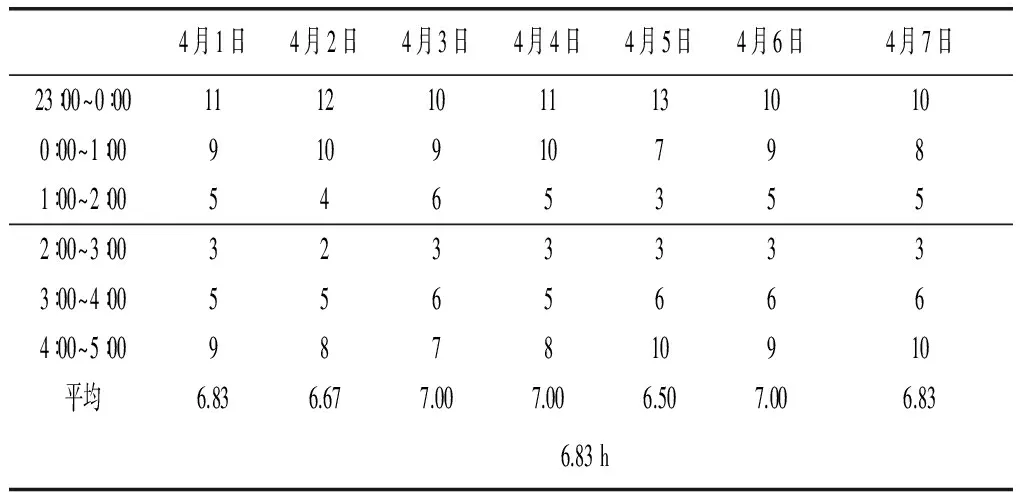
表3 平安大道车流量调查表
(1)传统高压钠灯耗电计算
以功率250 W计算,一年一个路灯的电量W年=0.25 kW·h·13 h·365 d=1 186.25 kW·h。
(2) LED路灯耗电计算
由调查可知LED路灯以功率80 W计算。汽车速度取20 km/h,则23∶00~5∶00LED工作时间累计2 h,则每晚工作时间为7+2=9 h,则一年一个LED路灯的电量由公式(2):得:W年=0.08 kW·h·9 h·365 d=262.8 kW·h
(3)红外感应装置耗电计算
红外感应装置为微功耗元件,其静态电流为0.065 A,电压为5 V,由公式
P=UI
(3)
得:W=P·3 600 s=1 170 J=0.000 325 kW·h
W年=6*0.000 325 kW·h·6 h·365 d=4.27 kW·h
综上所述求得,实行智能动态照明后1 000 m内路灯一年可节省电量为
W年=(1 186.25-262.8-4.27)×66=60 665.9 kW·h
2 关键技术
2.1 系统的整体结构及运行方式
系统用到了PC机、485通讯技术、人体热红外感应传感器、光强检测传感器等,上位机通过RS485总线通讯方式实现对每个路灯的实时通讯以及智能控制。若PC机出现故障,则采用应急措施使所有路灯亮起。
2.2 上位机RS232与RS485转换电路
RS232-485转换器主要包括了电源、232电平转换、485电路三部分。通过控制 MAX485 实现发送和接收状态的切换,平时 MAX485处于数据接收状态,当 PC 机发送数据时,MAX232 的 9 号引脚输出低电平,经 Q1 倒相后,使 MAX485 的/RE 和 DE 为高电平而处于数据发送状态。
2.3 主从式多机通讯的布线及规则
上位机采用PC机,下位机采用单片机,每一个单片机都有属于自己的地址,为了便于布线,在道路的左侧与右侧分别采用485总线布线方式,这样就避免了控制线路与道路有交叉。上位机与下位机的通讯遵从主从式多机通信协议约定。
2.4 大功率 LED 灯具的驱动方法
按驱动器输出的电压电流特性分,当前驱动大功率LED 灯具的方法主要有恒压驱动法、恒流驱动法和恒压恒流驱动法三种方法。
2.5 路灯的自动调光设计
设计采用光强检测传感器,光强检测传感器检测天空的亮度,将检测结果通过单片机送给PC机,PC机给各下位机发出命令,下位机执行命令,通过PWM脉宽调制方式,改变LED路灯的亮度。天亮则LED路灯较暗,天暗则LED路灯明亮。
3 小 结
本研究在低碳节能和智慧城市的大背景下,立足于“绿色照明工程”战略,根据城郊道路夜间交通流量分时段变化特征,改进现有灯光照明系统控制模式的不足,基于红外感应原理,利用485通讯技术,提出了城郊道路照明系统的智能控制模式,具有现实研究意义。
[1] 徐新光.浅谈绿色照明工程的发展与应用状况[J].科技信息,2009,(17):344-345.
[2] 刘承东.LED路灯在道路照明中的应用[J].中国照明电器,2009,(3):30-34.
[3] 鲁进;郭利进. 基于ZigBee的LED路灯照明系统设计与研究[J]. 微型机与应用,2013,32(32):78-80.
2017-02-14
魏艳楠(1989-),女,河南洛阳人,助教,研究方向:交通运输工程。
U491
:A
:1008-3383(2017)07-0187-02
猜你喜欢
中国计算机报(2020年9期)2020-03-25
科技与创新(2018年1期)2018-12-23
启蒙(3-7岁)(2018年12期)2018-12-13
小学阅读指南·低年级版(2017年11期)2017-12-06
北京航空航天大学学报(2017年7期)2017-11-24
汽车与安全(2017年9期)2017-09-29
居业(2017年5期)2017-07-24
现代工业经济和信息化(2016年2期)2016-05-17
北京纪事(2016年5期)2016-05-07
空间控制技术与应用(2015年2期)2015-06-05
