2ZXM-2型全自动蔬菜穴盘苗铺膜移栽机的研制
2017-09-15 06:17曹卫彬李树峰刘姣娣陈棒棒马晓晓
农业工程学报 2017年15期
李 华,曹卫彬,李树峰,刘姣娣,陈棒棒,马晓晓
2ZXM-2型全自动蔬菜穴盘苗铺膜移栽机的研制
李 华1,2,曹卫彬1※,李树峰1,刘姣娣1,陈棒棒1,马晓晓1
(1. 石河子大学机械电气工程学院,石河子 832003; 2. 重庆大学机械传动国家重点实验室,重庆 400044)
针对新疆辣椒、番茄等作物移栽效率低、强度大、移栽质量差及作业工序多等问题,该文研制了一种全自动蔬菜穴盘苗铺膜移栽机,整机主要由自动送苗系统、自动取苗机构与栽植机构、机架、动力传动系统、铺膜铺管装置及镇压覆土装置等组成,可实现一次性完成整形开沟、铺设地膜与滴灌带、自动移栽及覆土镇压等多道作业工序,实现作物膜上覆土移栽的全自动机械化作业过程,并能满足不同作物移栽种植要求。辣椒穴盘苗田间移栽试验结果表明:当机组前进速度为2.8 km/h、理论设计株距为20 cm时,移栽机移栽频率为62株/(min·行),立苗合格率为96.3%,漏栽率为2.8%,伤苗率为1.25%,移栽合格率为93.4%,移栽深度合格率为93.5%,株距合格率为94.7%,株距变异系数为7.9%;滴灌管铺设效果较好,无破损、打折,铺膜及覆土性能优良,地膜采光面展平度为98.2%,采光面宽度合格率为平均为97.8%,平均机械破损程度平均为3.4 mm/m2,膜孔全覆土率为97.8%,移栽机各项性能指标均能够满足辣椒穴盘苗铺膜移栽的农艺要求。该研究可为国内开展全自动旱地移栽机的研发提供参考,对推动新疆机械化育苗移栽技术的发展具有重要意义。
农业机械化;移栽;自动化;穴盘苗;试验
李 华,曹卫彬,李树峰,刘姣娣,陈棒棒,马晓晓. 2ZXM-2型全自动蔬菜穴盘苗铺膜移栽机的研制[J]. 农业工程学报,2017,33(15):23-33. doi:10.11975/j.issn.1002-6819.2017.15.003 http://www.tcsae.org
Li Hua, Cao Weibin, Li Shufeng, Liu Jiaodi, Chen Bangbang, Ma Xiaoxiao. Development of 2ZXM-2 automatic plastic film mulching plug seedling transplanter for vegetable[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(15): 23-33. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.15.003 http://www.tcsae.org
0 引 言
育苗移栽作为一种农艺栽培技术,能够避开春季低温、倒春寒等自然灾害,提高幼苗成活率,有效提高作物单产和品质,已被列为新疆十三五重点推广技术之一[1-5],目前新疆在番茄和辣椒种植方面已经开始大力推广育苗移栽技术,截止2015年,其移栽面积已达到总种植面积50%以上,且还在不断增加[6-7]。由于新疆地理与气候条件特殊,多年来作物移栽普遍采取先铺设地膜和滴灌带,后进行膜上成穴移栽的种植模式[8-9]。但受机械化移栽水平影响,目前新疆番茄和辣椒移栽作业主要以人工为主,半自动移栽机作业为辅,移栽作业时均需预先铺设地膜和滴灌带,不仅作业工序多,劳动强度大、生产效率低,而且栽植质量差、生产成本较高[10-15]。而全自动穴盘苗移栽机能够很好解决劳动力不足、作业效率低等问题,被国内外普遍认为是作物育苗移栽机械化发展的主要趋势和方向[16],一直是旱地移栽机械研发的重点和热点。
国外旱地全自动移栽机研究起步较早,主要结合其本国作物种植模式和农艺要求进行研制,且部分机型已有推广和应用,如意大利Ferrari公司研发的Futura系列,澳大利亚HDl44型,美国FMC及英国Pearson全自动移栽机等[17],这些移栽机作业效率高,自动化程度较高,但价格昂贵,结构复杂,整机体积庞大,主要针对裸地移栽,难以适应新疆膜上移栽的农艺要求,无法在新疆推广应用[8]。日本Yanmar、Izeki农机公司都有比较成熟的自动移栽机应用[18-19],但只适用于小地块垄上移栽,不适合新疆的大田作业及膜上移栽农艺要求。
中国目前对旱地自动移栽机的研发主要处于理论研究和试验阶段,还没有成熟机型推广应用。石铁[20]研制了一种全自动纸筒玉米秧苗移栽机,田间试验表明该机能够满足玉米开沟移栽要求,但不适用于穴盘苗膜上成穴移栽作业。范云翔等[21]设计了一种空气整根气吸式秧苗全自动移栽机,可用于将秧苗自动移栽到生长用的塑料大盘或花盆中,但不能进行田间移栽作业。张晨等[22]研发的2ZB-2型穴盘苗旱地膜上自动移栽机,该机栽植合格率为90%以上,但作业效率低,一直未见应用推广。吴福华等[23]设计的穴盘苗自动移栽机能够一次性完成取苗、送苗、栽植与覆土等作业,栽植成功率为92.5%,满足自动移栽要求,但只适用于垄上移栽作业。韩长杰等[24-25]在吊篮式半自动移栽机上安装自动取喂苗系统,研发了一种辣椒穴盘苗自动移栽机,试验表明该机栽植成功率达96.97%,满足膜上成穴移栽作业要求,但需提前铺设地膜和滴灌带,作业工序多。
基于以上分析,为满足番茄、辣椒等作物机械化自动铺膜成穴移栽的农艺要求,本文对穴盘苗自动取苗机构、自动送苗系统、自动栽植机构、铺膜铺管与膜上覆土机构等关键部件进行技术集成创新,研制了一种可同时完成开沟整型、铺膜铺管、自动取苗移栽及覆土镇压多道作业工序的蔬菜穴盘苗全自动铺膜移栽机。
1 整机结构与工作原理
1.1 膜上移栽种植模式及农艺要求
新疆辣椒、番茄移栽种植模式如图1所示。为了实现优质高产,选择土层深厚、保水肥,土壤较肥沃且渗水快,通透性好的壤土或砂壤土种植,精细整地达到齐、平、松、碎、净、墒六字标准。移栽时先铺设地膜与滴灌管,进行膜边覆土镇压,完成膜上成穴栽植后,进行秧苗穴孔覆土及镇压工序。
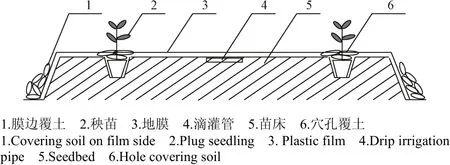
图1 膜上移栽种植示意图Fig.1 Schematic diagram of film transplanting cultivation
膜上覆土移栽的主要农艺要求为:栽苗的株距保持一致,当进行一膜两行移栽时,选用90 cm地膜,行距为40 cm,番茄移栽株距为不小于30 cm,辣椒移栽时株距为15~30 cm之间;栽苗深度要求保持一致:栽深一般为5~6 cm,即穴孔覆土厚度为覆盖秧苗基质以上1~2 cm之间;机械铺膜平展,膜边覆土紧实,采光面大且宽度不小于50 cm,保持一致,栽后立即采用加压滴灌浇水。
1.2 2ZXM-2型全自动蔬菜穴盘苗铺膜移栽机整机结构
根据新疆辣椒及番茄移栽种植的农艺要求及特点,研制的2ZXM-2型全自动蔬菜穴盘苗铺膜移栽机结构如图2所示,该机为一膜2行移栽机,主要工作部件按照机具纵向中心线对称布置,2套移栽组件分别对称布置安装,整机主要由自动送苗系统、取苗机构、栽植机构、机架、铺膜铺管机构、整形开沟装置与覆土镇压机构、动力传动系统7个部分组成。
1.3 主要工作过程及原理
2ZXM-2型全自动蔬菜穴盘苗铺膜移栽机适用苗盘结构参数为:苗盘外形尺寸为l1×l2=540 mm×280 mm,苗盘穴孔形状为倒四棱台,上边宽la=32 mm,底部宽为lb=16 mm,相邻穴孔中心距S=32 mm,穴孔深度为h=40 mm。苗盘纵列两端各开有16个长方形卡槽,卡槽对称布置,尺寸设计为3 mm×10 mm,穴盘结构如图3所示,穴盘可进行一定程度折弯,以便空苗盘顺利排出,方便回收。
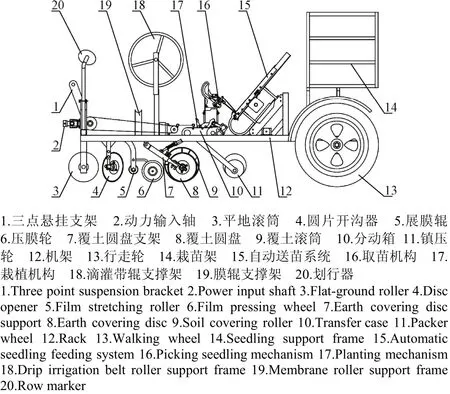
图2 2ZXM-2型全自动蔬菜穴盘苗铺膜移栽机Fig.2 2ZXM-2 automatic plastic film mulch vegetable plug seedling transplanter
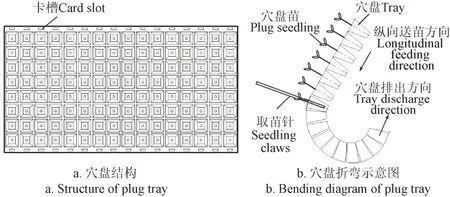
图3 穴盘示意图Fig.3 Sketch map of plug tray
移栽机作业环节主要由2个工作过程同时进行:
1)铺设地膜与滴灌管。移栽机田间作业时,先由人工分别将地膜和滴灌管一端掩埋压实,并将穴盘苗放置于自动送苗系统15的送苗板上。工作时,整个机组前进带动平地滚筒3转动压实地面形成平整的苗床,放置于滴灌带辊支撑架18上的滴灌管不断沿苗床纵向中心线位置被潜埋铺设,与此同时圆片开沟器4在苗床两侧分别开出地膜预埋沟,而放置于膜辊支撑架19上的地膜通过展膜辊5的作用展平拉紧,移栽机前进过程中,地膜被平整地铺设于苗床上,并由覆土圆盘8刮起土壤覆在膜边进行覆土,压膜轮6滚动过程中将地膜两侧土壤压实完成膜边镇压。
2)自动取苗移栽。机组前进过程中,拖拉机输出动力经分动箱10分配后分别驱动自动取苗机构16与栽植机构17配合运动,由自动送苗系统15控制苗盘进行精准步进移位,准确将穴盘苗送至取苗位置由取苗机构完成取苗并投苗,由鸭嘴栽植器完成膜上成穴植苗后,穴孔周围土壤顺势回填,在覆土圆盘8和覆土滚筒9共同作用下完成苗孔覆土,镇压轮11压实土壤进行镇压,从而同时完成自动移栽及膜上覆土过程。
2ZXM-2型全自动蔬菜穴盘苗铺膜移栽机运输时采用拖拉机悬挂方式,田间作业时由拖拉机牵引行走,拖拉机功率要求为30 kW以上。移栽时通过控制机组前进速度,调节移栽株距范围,主要技术参数如表1所示。

表1 2ZXM-2型全自动蔬菜穴盘苗铺膜移栽机主要技术参数Table 1 Main technical parameters of 2ZXM-2 automatic plastic film mulch vegetable plug seedling transplanter
2 关键部件设计
2.1 自动取苗机构
2.1.1 取苗轨迹特点及工作过程分析
自动取苗机构作为全自动移栽机的核心部件之一,其功能是模拟人工取投苗动作,从穴盘中自动取出秧苗并运送至投苗位置,自动投入至栽植器中。根据人工取苗过程中穴盘苗空间运动轨迹及姿态转换特点,结合适栽期穴盘苗的形态参数进行取苗机构参数分析与设计[7],取苗机构主要由机械传动机构和取苗臂组成,其结构示意简图与取苗轨迹如下图4所示。

图4 取苗机构与取苗过程示意图Fig.4 Schematic diagram of seedling pick-up mechanism and seedling pick-up process
该取苗机构与日本洋马齿轮连杆组合式取苗机构结构特点类似,均采用圆柱齿轮行星轮系与滑道组合的形式,但本文研究的取苗机构紧密结合穴盘苗物理形态特性进行设计,并对其关键部件行星轮系机构与曲线滑道进行了优化改进,使得取苗轨迹更加简单且轨迹曲线更为光滑,提高了秧苗空间姿态转换平稳性,且结构简单。
工作特点为:取苗针4尖点初始位置位于a点,方向垂直向下,a-b-c段轨迹为取苗轨迹,由曲线段ab和直线段bc组成;c-b-a为运苗段轨迹,当取苗针夹持秧苗至b点位置时,开始转变空间运动姿态,取苗针沿ba段轨迹运动过程中,秧苗空间姿态逐渐由倾斜状态转变为竖直向下,取苗针运动返回至a点时为投苗位置,秧苗转换为竖直状态。本机苗盘倾斜放置角度设置为:α=60°。取苗过程中要求直线段轨迹bc完全垂直于苗盘以降低苗钵损伤,取苗角为β=30°。
取苗机构形成预定取苗轨迹的关键在于行星轮系-摆杆机构与曲线滑道的参数分析。
2.1.2 基于预定轨迹的取苗机构行星轮系-摆杆机构设计
该取苗机构为一种基于特殊曲柄滑块机构结合曲线滑道组合的取苗机构[7],其中,曲柄摆杆机构是由3个圆齿轮以及齿轮盒构成的行星轮系机构-摆杆机构,为便于分析,将行星轮系机构简化为曲柄,结构示意简图如图5所示,取苗臂与摆杆一端B点的滑块铰接。

图5 曲柄摆杆机构示意图Fig.5 Schematic diagram of crank-rocker mechanism
设定曲柄逆时针匀速旋转,根据曲柄滑块机构运动特性,可以获得滑块任意时刻运行距离S,本文中S取值范围为0≤S≤2(r+l)。


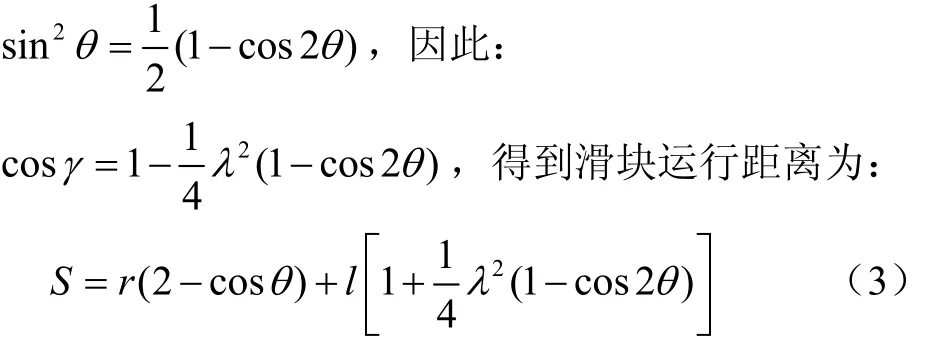
按照设计要求,滑块行程为K1K2,当滑块从K1运动至K2时,曲柄OA转过角度为:θ=π,此时滑块运行距离S=12KKl=2(r+l),代入式(3)计算可得:S=2(r+l)=3r+l,得到:r=l。
摆杆任意时刻旋转角度θ0=θ+λ,0≤θ0≤2π,则有:θ0=2θ=2λ,同时,曲柄转动方向与摆杆自转方向相反,即θ=−θ0/2。
因此可设计一行星轮系摆杆机构完成滑块的往复直线运动规律。行星轮系机构由3个圆齿轮构成与行星架构成,其中太阳轮与行星轮之间的齿数比为:

由式(4)可知,太阳轮与行星轮旋转方向相反,通过中间轮进行换向,由此得到太阳轮、中间轮与行星轮齿数之比为:2∶1∶1。
设取苗轨迹直线段长度为l0,穴盘苗从穴盘中成功取出且不与苗盘输送架不发生干涉的条件为:

式中h为穴孔深度值,mm;根据取苗轨迹形成原理,l0取值由曲柄和摆杆长度共同决定,设计时须满足r+l≈l0,根据(5)式,取l0=80 mm,则r=l=40 mm,即太阳轮旋转中心与行星轮旋转中心的距离l0A=40 mm,考虑装配等因素,调整为l0A=41 mm,计算获得3个直齿圆柱齿轮的齿数分别为:太阳轮32,中间齿轮与行星轮均为16,模数m=1。
2.1.3 曲线滑道参数分析
曲线滑道是取苗机构形成预定轨迹姿态的关键,由图4可知,取苗轨迹直线段主要由滑道直线段控制,而曲线段轨迹则由弧形滑道控制,由上节内容分析可知,滑道直线段长度即为滑块行程极限位置K1K2之间的距离4r=160 mm, r为曲柄长度。利用Adams仿真软件对取苗机构简化机构进行运动学仿真分析,获得滑杆与弧形滑道在不同参数组合下取苗轨迹姿态变化情况如图6所示。
根据取苗机构总体结构特点,滑杆长度分别选取l=62、82、102 mm进行对比分析,对应的滑道圆弧中心分别为O1、O2、O3,半径分别为R1=36 mm,R2=47 mm,R3=59 mm。仿真分析结果表明,滑杆越长,滑道圆弧半径越大,取苗轨迹越高,取苗过程中秧苗易与取苗机构发生干涉,使取苗机构整体尺寸变大;滑杆越短,圆弧滑道半径越小,取苗轨迹整体高度下降,不利于秧苗轨迹姿态转化且秧苗也容易同送苗架发生干涉,因此,滑杆尺寸选取l=82 mm,对应的滑道圆弧半径为R=47 mm,相对于曲柄旋转中心O点的圆弧中心O2坐标值:xO2=47 mm,yO2=82 mm。
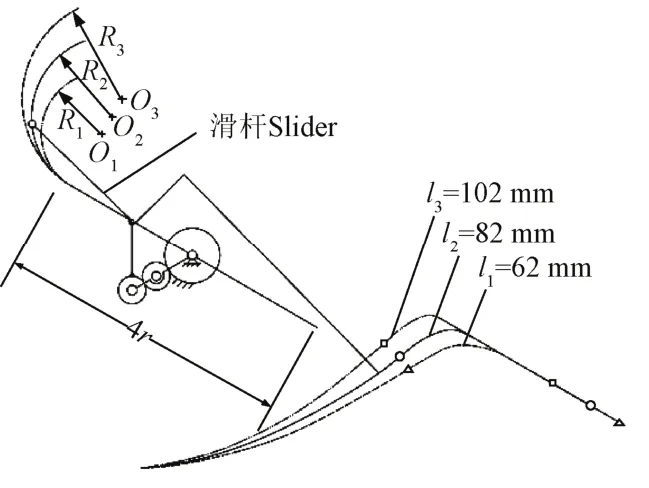
图6 不同滑杆长度对应的取苗轨迹Fig.6 Seedlings pick-up trajectory of different slide bar lengths
取苗针10设计为长度l=180 mm,直径为3.8 mm,针体下端加工成长35 mm斜楔状以便于夹取秧苗钵体,降低对钵体及根系损伤。取苗试验表明,两取苗针尖点在夹持秧苗时保持宽度约为6 mm,苗针插入钵体距穴孔底部5~6 mm时,夹持秧苗稳定,取苗效果较好。
2.2 自动送苗系统
自动送苗系统主要与自动取苗机构配合工作,由PLC系统控制送苗装置运动,将穴盘苗准确输送至取苗位置。该系统主要由穴盘纵向移位机构、横向移位机构以及PLC控制系统组成,如下图7所示。
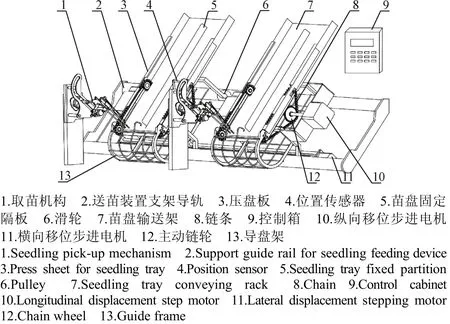
图7 自动送苗系统示意图Fig.7 Schematic diagram of automatic seedling feeding system
其工作过程为:
1)移栽作业前将穴盘苗放至苗盘输送架7,向下推送使苗盘两侧夹入压盘板3,并使苗盘两侧的第一对卡槽卡入输送链条8的卡扣中,调整苗盘位置使取苗针正对于苗盘右下第一格穴孔,此时送苗装置处于初始工作位置,系统上电复位,送苗系统控制方案如图8所示。
2)移栽作业时,取苗机构1取出第一格秧苗并投苗,待其返程准备下次取苗时,系统通过位置传感器4采集到取苗机构位置信息,将信号实时反馈至PLC控制系统9,激活PLC控制器并形成一个苗盘移位闭环步进定位控制系统(如图9所示)。
系统发出指令控制横向移位步进电机11工作,驱动滚珠丝杠转动并带动苗盘输送架整体面对取苗针横向向左(正向)移动一格完成一次横向送苗,穴盘移动距离S=32 mm,苗盘如此间歇移动7格完成第一排8株秧苗送苗后,PLC控制系统驱动纵向移位步进电机10转动,带动纵向送苗机构驱动苗盘纵向整体向下移动一格,进行第二排秧苗横向反向间歇送苗。系统如此往复工作以实现穴盘苗的自动送苗作业。

图8 自动送苗系统控制方案设计框图Fig.8 Design diagram of automatic seedling feeding system control scheme
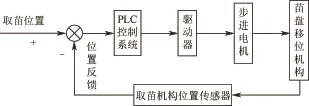
图9 控制系统框图Fig.9 Control system diagram
3)在输送链条6及导盘架11的作用下,苗盘纵向向下间歇移动沿导盘架逐步退出压盘板,至完全退出后由人工取出放置于载苗架回收空盘。
试验证明该自动送苗系统工作可靠、稳定,送苗准确,可满足自动送苗工作要求。
2.3 栽植机构主要参数分析
栽植机构是全自动移栽机的入土栽植部件,也是影响整机移栽作业质量与效率的核心部件,其主要作用是接取取苗机构投落的穴盘苗,进行膜上打穴植苗,要求保证一致的移栽株距、栽植深度以及较好的直立度,不能出现挂膜、撕膜[20,26],本机配置的栽植机构为一种基于行星轮系-五杆机构的植苗机构[27],其简化结构示意图如图10所示。行星轮系-五杆式栽植机构的运动静轨迹为“梭形”植苗轨迹,可满足穴盘苗膜上成穴栽植的运动轨迹和姿态要求。

图10 行星轮系-五杆栽植机构结构示意图Fig.10 Schematic diagram of mechanism with planetary spur gears and five-bar
2.3.1 栽植机构工作过程分析
图10所示为行星轮系五杆式栽植机构简图,其中曲柄 OO1、连杆O1E、EF和连杆FG及机架构成一个行星轮系式五杆机构,行星轮系机构简化为曲柄OO1,作为原动件绕O点逆时针转动,工作时驱动其他杆件运动从而带动栽植鸭嘴按照预定轨迹运动。
鸭嘴栽植器与连杆O1E一端固结,当鸭嘴栽植器运动至轨迹最高点时,接取取苗机构投下的穴盘苗,向下运苗至接近轨迹最低点时,鸭嘴张开将穴盘苗植入穴孔内,随后保持张开状态进行返程运行至越过已栽秧苗后闭合。行星轮系五杆机构是鸭嘴栽植器的动力驱动机构,其运动过程也是鸭嘴栽植器形成预定栽苗轨迹的关键。
设连杆O1E与曲柄OO1任意时刻转角相等,方向相反,且连杆O1E相对于曲柄OO1的转角α1始终满足以下条件:

式中ψ为连杆O1E初始安装角,(°);设太阳轮O与行星轮O1齿数分别为Z0、Z01,则有
桥型图非常适用于类比推理的教学环节,教师可在桥形图的上下面写下相关的化学知识,然后与学生分析其中属性,按照这种属性,联想出更多类似的例子,这也是化学教学中的一种常用方法。

与取苗机构行星轮系机构特点类似,栽植机构行星轮系机构中间齿轮也主要起到换向作用,其参数与行星轮相同,因此可知行星轮系机构中太阳轮、中间轮与行星轮齿数之比为2∶1∶1,且L1=L2。
2.3.2 五杆机构死点位置分析与机构参数
该栽植机构为平面铰链五杆机构,根据五杆机构运动特性,当两从动构件EF和FG共线时,机构运动会出现“顶死”现象,反之则不会出现死点位置,因此行星轮系五杆机构在运动过程中必须满足以下条件:

行星轮系五杆栽植机构行星轮系与平面铰链五杆机构的尺寸参数须满足上述式(7)、式(8)条件。栽植机构样机前期研究过程中,通过建立栽植机构运动学理论模型,基于VB6.0编写人机交互平台优化参数与栽植轨迹,获得了一组较优机构参数组合,得到了一组最佳参数组合:L1=68 mm,L2=77 mm,L3=166 mm,L4=65 mm,xD=155.5 mm,yD=10 mm,齿轮箱初始安装角为90°,植轨迹高度为290 mm[27],栽植机构三维实体模型如图11所示。辣椒苗田间栽植试验表明,该栽植机构可使秧苗在静止状态进行覆土镇压,穴口直径仅为65 mm,有利于秧苗保持较好的直立状态,降低倒伏率,且无挂膜、撕膜情况,工作性能良好。

图11 栽植机构三维造型Fig.11 3D model of planting mechanism
齿轮箱安装时离地高度须大于140 mm,才能保证栽植机构工作时不与栽植后的秧苗发生干涉。
2.4 覆土装置设计
全自动铺膜移栽机覆土装置主要由覆土圆盘、覆土滚筒、覆土圆盘安装支架、导土板、挡土板等组成,如图12所示,当机组前进时,覆土圆盘7将切起的碎土翻起覆盖于地膜膜边,可完成膜边覆土作业,同时可将部分碎土翻入覆土滚筒3,覆土滚筒滚动过程中通过安装于其内壁的导土板6将细碎土壤进行轴向输送,土壤在覆土滚筒与挡土板4之间的间隙中撒落,并均匀覆盖于膜面上形成两条土带,完成秧苗覆土作业,由镇压轮压实。

图12 覆土装置示意图Fig.12 Schematic diagram of soil covering device
2.4.1 覆土圆盘设计
覆土圆盘的主要作用是进行膜边覆土,并为覆土滚筒提供给碎土,其调节效果对覆土质量的影响较大。覆土圆盘轮廓形状设计为球面状,圆盘直径D=300 mm,覆土圆盘安装支架2上设有调节装置,可调节覆土圆盘安装角度与入土深度,以调节膜边及膜上覆土量。试验表明:当两覆土圆盘刃口间距设计为80 cm,覆土圆盘与机组前进方向夹角为20°,安装倾斜角为18°,置于覆土滚筒端面的1/3处,且切土深度为5~7 mm时,覆土圆盘切土效果较好,并具有较合适的供土量,覆土滚筒覆土均匀,且覆土宽度与厚度较为理想,可满足全自动移栽机膜上覆土的作业要求。
2.4.2 覆土滚筒的设计
覆土滚筒是膜上移栽覆土装置最为重要的部件,在覆土作业中起到关键性的作用,其主要是将覆土圆盘推入的土壤通过导土板的自身螺旋状结构,将土壤输送至漏土缝隙处,使土壤撒落并均匀覆盖于苗行膜面上。覆土滚筒的覆土质量直接影响秧苗栽植质量[28]。设计参数主要有:覆土滚筒导土板螺旋角、滚筒尺寸及导土板个数等。现对导土板进行轴向输送土壤的基本条件进行分析:当覆土滚筒在膜面上滚动时,被翻入滚筒的土壤在滚筒内壁及导土板的共同作用下沿滚筒轴向向漏土缝隙处运动。导土板上的土壤在螺旋面某点处于临界滑动状态时,其受作用力情况如图13所示。

图13 导土板上土壤受力分析Fig.13 Force analysis of soil on soil guide plate
由于移栽机工作时,覆土滚筒转速相对较低,离心力F1较小,因此在本次分析中忽略F1的影响。建立土壤受力平衡方程如下[29]

式中θ0为土壤与导土板的摩擦角,(°)。分析导土板上土壤受力情况可知,土壤沿导土板螺旋面滑动的条件为:

求解公式(11),可得

因此,为保证导土板沿滚筒轴向输送土壤,其安装角度φ与摩擦角θ0应满足式(12)条件。
覆土滚筒转动时,土壤沿导土板滑动速度越高,其输送土壤量越大。假设土壤沿滚筒轴向运动的加速度为z″,建立土壤运动的微分方程为

求解式(13)可得

式中m为土壤的质量,kg。
分析上式可知,当覆土滚筒的直径和滚动速度一定时,其轴向输送土壤量和导土板螺旋角存在函数关系。因此选择合适的螺旋角,才能满足滚筒轴向输送土壤量的要求,从而保证秧苗有较好的覆土效果。试验表明,当覆土滚筒直径为300 mm,圆周均布导土板数量为3,导土板螺旋角25~30°,挡土板与滚筒安装距离(即漏土间隙)为30 mm时,能较好满足穴盘苗移栽膜上覆土的生产要求。
3 田间移栽试验
3.1 试验条件
田间性能试验于2016年6月1日在新疆石河子市石河子大学兵团农业机械重点实验室试验地进行。试验地长100 m,宽5 m,试验前,试验地经过翻整碎土,无杂草、秸秆及残茬覆盖,地表平整,整地条件较好。测得土壤含水率均值为12.5%。室外温度为23 ℃,空气湿度27%,风速3.5 m/s。地膜选用厚度为0.005 mm,宽度为900 mm的聚乙烯透明农用地膜,无粘连和破损。
试验用苗为新疆石河子市142团育苗大棚培育的“红龙13”辣椒苗。试验时测得穴盘苗钵体含水率为36.4%~45.6%,辣椒苗长势较好,根系发达,且充分包裹缠绕钵体,试验用苗如下图14所示。

图14 辣椒穴盘苗Fig.14 Plug seedling of pepper
随机选取80株辣椒苗进行形态参数测定, 测定结果如下表2所示。
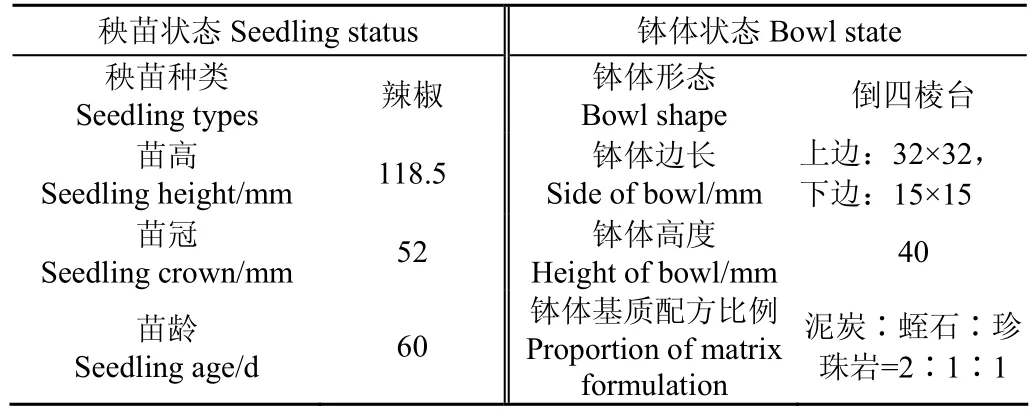
表2 秧苗状态及钵体情况Table 2 Seedling status and bowl condition
3.2 试验方法
2ZXM-2型全自动蔬菜穴盘苗铺膜移栽机配套动力为John Deere 904轮式拖拉机,采用三点后悬挂的挂接方式牵引移栽机,机组作业速度控制在2.5~3.0 km/h 之间。设计理论移栽株距20 cm、栽深7 cm,地膜理论采光面为50 cm。田间试验测区长50 m,宽5 m,移栽机往返2个单程作业,理论移栽株数为512株,去除前后各24株,即4行测段内各选取中间连续的80株辣椒苗作为采集样本,每行测定一组,取其平均值。
由于中国还没有制定辣椒或番茄穴盘苗自动移栽机性能试验方法即相关测试标准,因此本次试验方法参照JB/T10291-2013《旱地栽植机械行业标准》执行,以立苗合格率、株距变异系数和栽植深度合格率、漏栽率、伤苗率为试验测试指标进行移栽性能试验[30]。同时,依据标准NY/T1559-2007《滴灌铺膜铺管精密播种机质量评价技术规范》测试移栽机铺膜覆土性能。本次试验控制机组作业速度为2.8 km/h,测得移栽机栽植频率为62株/min·行,样机田间测试试验现场如图15所示。

图15 田间铺膜移栽试验Fig.15 Field film mulching and transplanting text
3.2.1 移栽深度合格率测定
移栽深度合格率定义为:在一定的栽植区间内所测栽植深度合格的秧苗数与总株数的百分比[31],参照JB/T10291-2013《旱地栽植机械行业标准》,试验测量栽植深度为秧苗与覆土表面交点到秧苗根部的垂直距离,栽植深度合格率H为栽植深度合格株数Nh占理论移栽株数N′的百分比,栽植深度在理论深度的±2 cm范围内视为栽植深度合格。本设计理论栽植深度为7 cm,标准规定H≥75%即为合格。
3.2.2 立苗合格率测定
立苗合格率指秧苗栽植后的直立状态,标准规定立苗率L为秧苗主茎与地面夹角不小于30°的秧苗占实际移栽秧苗株数(不含漏栽、埋苗、倒伏、伤苗株数)的百分比[32],设定辣椒秧苗主茎与地面夹角为γ,根据辣椒穴盘苗移栽农艺要求及特点,当γ[80°,∈ 90°]为直立度较好,γ∈[65°, 80°]为良好,γ∈[50°, 65°]为合格,γ<50°则为不合格[33-34]。试验通过测定计算出直立合格的秧苗株数与测试总株数的比值确定立苗合格率,标准规定Lh≥85%为合格。
3.2.3 漏栽率测定
标准规定漏栽指理论应栽植秧苗的地方而没有秧苗,通过测得相邻两株秧苗的株距Xi(mm)与理论株距Xr(mm)之间的关系来判断漏栽株数,当1.5Xr<Xi≤2.5 Xr,漏栽1株,当2.5Xr<Xi≤3.5 Xr,漏栽2株,以此类推。在本试验中利用移栽时漏栽株数占理论移栽株数的百分比M表示漏栽率,标准规定M≤5%为合格。
3.2.4 伤苗率测定
旱地栽植机械标准规定当栽植的秧苗受到损伤而影响其正常生长时成为伤苗,伤苗率W为伤苗株数占测定总株数的百分比,由于中国目前还没有有关于辣椒秧苗移栽作业时进行损伤判别的标准,本次试验中规定栽植后的辣椒苗茎杆出现明显损伤,苗叶出现破损与脱落及基质出现明显破损情况,均记为伤苗,标准规定W≤3%为合格。
3.2.5 株距合格率测定
测取相邻2株苗之间的距离,设定为Xi(mm),理论移栽株距为Xr(mm),当相邻2株辣椒苗实测株距Xi在0.5<Xi≤1.5 Xr范围内,则为合格株距。以株距合格的苗株数量与样本总数的比值计算出株距合格率。株距合格率、株距变异系数是移栽机栽植精度的主要评价指标[30],体现全自动穴盘苗移栽机栽植的均匀程度。
株距变异系数定义为:在一定的栽植区间内所测得的实际株距的标准差与平均值的百分比。参照JB/T10291-2013《旱地栽植机械行业标准》,测量各试验组株距,计算株距变异系数。
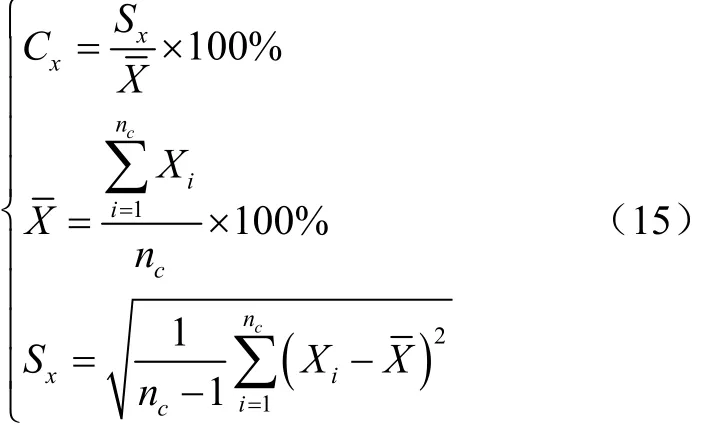
式中Cx为株距变异系数,%;X为株距平均值,cm;Sx为株距标准差,cm;nc为实测株距数,株;Xi为实测株距,cm。
3.2.6 铺膜覆土质量测定
全自动铺膜移栽机铺膜与覆土性能试验测定主要通过:地膜采光面宽度合格率、地膜采光面展平度、地膜采光面机械破损程度、膜边覆土厚度合格率、膜边覆土宽度合格率及膜孔全覆土率6项指标进行试验测定并计算。依据标准NY/T1559-2007《滴灌铺膜铺管精密播种机质量评价技术规范》,在移栽测区内往返2个单程上交错选定4个长度为5 m的测区,并选取测区内均布的11个点为测点,分别测试上述6项指标,取平均值。地膜采光面机械破损程度Sp可通过式(16)计算。

式中Sp为采光面机械破损程度,mm/m2;li为小区内第i处机械破损部位的边长或缝长,mm;L为小区长度,m;B为小区内采光面宽度平均值,mm;np为测点个数,个。
3.3 试验结果与分析
全自动铺膜移栽机铺膜、覆土质量测试结果见表3所示。根据试验结果,该机铺膜及覆土效果较好,测试计算结果均符合合格指标。由于覆土滚筒参数设计合理,移栽机作业时对膜面机械损伤较小,地膜采光面机械破损程度Sp平均值仅为3.4 mm/m2,膜孔全覆土率达到97.8%,覆土均匀,满足辣椒苗膜上移栽覆土作业要求。

表3 铺膜与覆土质量测试结果Table 3 Testing results of film mulching and soil covering quality
移栽机膜上移栽作业质量测试结果如表4、表5所示,分析移栽质量和移栽精度测试结果可知,2ZXM-2型全自动蔬菜铺膜移栽机在整地效果良好且土质比较松软,辣椒穴盘苗育苗质量较好情况下移栽质量完全满足辣椒穴盘苗膜上移栽农艺要求。试验中采集辣椒苗样本320株,其中株距合格株数303株,实测平均移栽株距为21 cm,理论设计株距为20 cm,相差较小,株距合格率达94.7%,株距变异系数为7.9%,栽植较为均匀,栽植机构参数设计合理且性能稳定,使得辣椒苗栽植深度变化较小,变异系数仅为3.2%,移栽深度合格率达到93.5%。同时,根据表4中移栽机移栽质量试验结果可知,辣椒苗栽植后具有较好的直立度,主要是因为栽植机构可实现零速栽植,即秧苗在植入穴孔瞬间时其水平速度接近为零速,其方向为竖直向下,秧苗能够在静止状态快速进行覆土镇压,保持较好的直立状态,立苗合格率平均值达到96.3%,其中直立度较好的穴盘苗(即γ∈[80°,90°])占78.4%。移栽机作业过程中漏栽率为2.8%,伤苗率也较低,仅为1.25%,损伤的秧苗主要是钵体出现破损,苗叶和茎秆并没有出现损伤情况,而自动取苗机构投苗时由于推苗杆没有及时将苗推下会造成漏栽情况,通过调整推苗杆装配间隙可使其顺利下落实现可靠投苗。

表4 移栽质量试验结果Table 4 Experiment result of transplanting quality

表5 移栽精度试验结果Table 5 Experiment result of transplanting precision
4 结 论
1)研制了一种全自动蔬菜穴盘苗铺膜移栽机,可一次性完成开沟整型、铺设地膜与滴灌带,自动送苗、取苗及投苗作业、成穴移栽及镇压覆土等多道作业环节,节约人力和生产成本,提高工作效率。整机结构紧凑,工作性能可靠,能较好满足新疆地区辣椒和番茄等作物膜上成穴移栽农艺要求。
2)田间试验表明,机具作业速度为2.8 km/h时,栽植频率为62株/min·行,立苗合格率为96.3%,漏栽率为2.8%,伤苗率为1.25%,移栽合格率为93.4%,株距合格率为94.7%,移栽株距为21 cm,株距变异系数7.9%,移栽深度变异系数3.2%;平均移栽深度为7.9 cm,移栽深度合格率为93.5%,移栽过程中伤苗率低,对膜面机械损伤较小,地膜采光面机械破损程度平均值仅为3.4 mm/m2,膜孔全覆土率达到97.8%,膜上移栽质量完全满足《JB/T 10291-2001旱地栽植机械》行业标准与NY/T1559-2007《滴灌铺膜铺管精密播种机质量评价技术规范》要求,符合辣椒穴盘苗铺膜移栽的农艺规程。
本文所研制的全自动移栽机将机械结构与自动控制原理紧密结合,利用PLC控制系统实现自动送苗装置与取苗机构之间的精准配合,整机各部件工作过程中运动协调关系较好,实现了穴盘苗全自动机械化移栽作业的技术要求,可为开展穴盘苗全自动移栽机的研究提供参考。
[1] 李亚雄,刘洋,李斌,等. 新疆地区作物移栽实践及移栽机研究现状[C]//2012中国农业机械学会国际学术年会论文集,2012(2):191-194.
Li Yaxiong, Liu Yang, Li Bin, et al. Crop transplanting practice and present situation of research on transplanting machine in Xinjiang area[C]//International Academic Annual Conference of China Agricultural Machinery Association 2012(2): 191-194. (in Chinese with English abstract)
[2] 庞胜群,王祯丽,张润,等. 新疆加工番茄产业现状及发展前景[J]. 中国蔬菜,2005(2):39-41.
Pang Shengqun, Wang Zhenli, Zhang Run, et a1. The present Situation and future prospects of tomato industry in Xinjiang[J]. China vegetables, 2005(2): 39-41. (in Chinese with English abstract)
[3] 新疆维吾尔自治区统计局. 新疆统计年鉴[M]. 北京:中国统计出版社,2015:356-358.
[4] 郝金魁,张西群,齐新,等. 我国栽植机械研制现状及发展建议[J]. 农机化研究,2011,33(7):222-224.
Hao Jinkui, Zhang Xiqun, Qi Xin, et al. Present situation and development proposal of the mechanization of seedling transplantation in China[J]. Journal of Agricultural Mechanization Research, 2011, 33(7): 222-224. (in Chinese with English abstract)
[5] 于晓旭,赵匀,陈宝成,等. 移栽机械的发展现状与展望[J].农业机械学报,2014,45(8):44-53.
Yu Xiaoxu, Zhao Yun, Chen Baocheng, et al. Prospect and reflections on development of transplanter[J]. Transactions of the Chinese Society of Agricultural Machinery, 2014, 45(8): 44-53. (in Chinese with English abstract)
[6] 赵晓伟,韩长杰,赵占军,等. 新疆地区辣椒、番茄移栽机发展现状及趋势[J]. 农业科技与装备,2015(5):41-43.
Zhao Xiaowei, Han Changjie, Zhao Zhanjun, et al. Present situation and development trend of chilli and tomato transplanter in Xinjiang[J]. Agricultural Science & Technology and Equipment, 2015(5): 41-43. (in Chinese with English abstract)
[7] 李华,曹卫彬,李树峰,等. 辣椒穴盘苗自动取苗机构运动学分析与试验[J]. 农业工程学报,2015,31(23):20-25.
Li Hua, Cao Weibin, Li Shufeng, et al. Kinematic analysis and test on automatic pick-up mechanism for chili plug seedling[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(23): 20-25. (in Chinese with English abstract)
[8] 刘洋,李亚雄,李斌,等. 新疆作物移栽与移栽机研究现状[J]. 广东农业科学,2013,40(9):189-191.
Liu Yang, Li Yaxiong, Li Bin, et al. Research of China’s Xinjiang region crop transplanting and transplanting machines[J]. Guangdong Agricultural Sciences, 2013,40(9): 189-191. (in Chinese with English abstract)
[9] 韩长杰,张学军,杨宛章,等. 旱地钵苗自动移栽技术现状与分析[J]. 农机化研究,2011,33(11):238-240.
Han Changjie, Zhang Xuejun, Yang Wanzhang, et a1. Present status and analysis of dry-land auto-transplanting seedling technique[J]. Journal of Agricultural Mechanization Research, 2011,33(11): 238-240. (in Chinese with English abstract)
[10] 胡敏娟,尹文庆,胡飞,等. 穴盘苗自动取苗试验系统的研制[J]. 南京农业大学学报,2011,34(3):122-126.
Hu Minjuan, Yin Wenqing, Hu Fei, et al. Development of test system for automatic pick-up plug seedlings[J]. Journal of Nanjing Agricultural University, 2011, 34(3): 122-126. (in Chinese with English abstract)
[11] 张振国,曹卫彬,王侨,等. 穴盘苗自动移栽机研究现状与展望[J]. 农机化研究,2013,35(5):237-241.
Zhang Zhenguo, Cao Weibin, Wang Qiao, et al. Development status and propect of plug seedlings automatic transplanting machine[J]. Journal of Agricultural Mechanization Research, 2013,35(5): 237-241. (in Chinese with English abstract)
[12] 俞高红,俞腾飞,叶秉良,等. 一种旋转式穴盘苗取苗机构的设计[J]. 机械工程学报,2015,51(7):67-76.
Yu Gaohong, Yu Tengfei, Ye Bingliang, et al. Design of a rotary plug seedling pick-up mechanism[J]. Journal of Mechanical Engineering, 2015, 51(7): 67-76. (in Chinese with English abstract)
[13] 金鑫,李树君,杨学军,等. 蔬菜穴盘苗取苗机构分析与参数优化[J]. 农业机械学报,2013(增刊1):1-6,13.
Jin Xin, Li Shujun, Yang Xuejun, et al. Analysis and parameter optimization for vegetable plug seedling pickup mechanism[J]. Transactions of the Chinese Society of Agricultural Machinery, 2013(Supp.1): 1-6, 13. (in Chinese with English abstract)
[14] 薛党勤,侯书林,张佳喜. 我国旱地移栽机械的研究进展与发展趋势[J]. 中国农机化学报,2013,34(5):8-10.
Xue Dangqin, Hou Shulin, Zhang Jiaxi. Development trend and research progress of nonirrigated farmland transplanting in China[J]. Journal of Chinese Agricultural Mechanization, 2013, 34(5): 8-10. (in Chinese with English abstract)
[15] 卢勇涛,李亚雄,刘洋,等. 国内外移栽机及移栽技术现状分析[J]. 新疆农机化,2011(3):29-32.
Lu Yongtao, Li Yaxiong, Liu Yang, et al. Status analysis of abroad’s transplanting machine and transplanting technology[J]. Xinjiang Agricultural Mechanization, 2011(3): 29-32. (in Chinese with English abstract)
[16] 崔巍,徐盼,王海峰,等. 旱地自动移栽技术发展现状及分析[J]. 农机化研究,2015,37(6):1-5.
Cui Wei, Xu Pan, Wang Haifeng, et al. Present status and analy-sis of dry-land auto-transplanting seedling technique[J]. Journal of Agricultural Mechanization Research, 2015,37(6): 1-5. (in Chinese with English abstract)
[17] 张丽华,邱立春,田素博. 穴盘苗自动移栽机的研究进展[J].农业科技与装备,2009(5):29-31.
Zhang Lihua, Qiu Lichun, Tian Subo. Progress in the research of manipulator of transplanting potted tray seedlings[J]. Agricultural Science & Technology and Equipment, 2009(5): 29-31.(in Chinese with English abstract)
[18] 伊藤尚胜,清水修一. 移植机的苗移植机构:ZL99118740.7[P].2006-03-05.
[19] 竹山智洋. 蔬菜移植机:ZL200480007602.4[P].2004-09-01.
[20] 石铁. 全自动玉米秧苗移栽机的研制与试验[J]. 农业工程学报,2015,31(3):23-30.
Shi Tie. Development and test of automatic corn seedling transplanter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(3): 23-30. (in Chinese with English abstract)
[21] 范云翔,杨子万,Adekola K A,等. 温室全自动移栽机的研究开发[J]. 农业工程学报,1996,12(2):111-115.
Fan Yunxiang, Yang Ziwan, Adekola K A, et al. Development of automatic transplanter in greenhouse[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 1996, 12(2): 111-115. (in Chinese with English abstract)
[22] 张晨,梁佳,郭俊先,等. 2ZB-2型穴盘钵苗旱地膜上自动移栽机的研制与试验[J]. 新疆农机化,2014(1):19-20.
Zhang cheng, Liang Jia, Guo Junxian, et al. Development and test of the automatic transplanting machine for 2ZB-2 type plug seedling on dry film[J]. Xinjiang Agricultural Mechanization, 2014(1): 19-20. (in Chinese with English abstract)
[23] 吴福华,毛罕平,胡建平,等. 穴盘苗自动移栽机设计及实验[J]. 农机化研究,2013, 35(4):156-159.
Wu Fuhua, Mao Hanping, Hu Jianping, et al. Design and experiment of the plug seedlings auto-transplanter[J]. Journal of Agricultural Mechanization Research, 2013,35(4): 156-159. (in Chinese with English abstract)
[24] 韩长杰,杨宛章,张学军,等. 穴盘苗移栽机自动取喂系统的设计与试验[J]. 农业工程学报,2013,29(8):51-52.
Han Changjie, Yang Wanzhang, Zhang Xuejun, et al. Design and test of automatic feed system for tray seedlings transplanter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(8): 51-52. (in Chinese with English abstract)
[25] 赵晓伟,郭辉,赵占军,等. 辣椒穴盘苗自动移栽机的设计及田间试验[J]. 甘肃农业大学学报,2015,12(6):165-169.
Zhao Xiaowei, Guo Hui, Zhao Zhanjun, et al. Design and field experiments of automatic transplanter for pepper plug seedlings[J]. Journal of Gansu Agricultural University, 2015, 12(6): 165-169. (in Chinese with English abstract)
[26] 金鑫,李树君,杨学军,等. 膜上移栽钵苗栽植机构运动分析与参数优化[J]. 农业机械学报,2012,43(3):30-33.
Jin Xin, Li Shujun, Yang Xuejun, et al. Motion analysis and parameter optimization for pot seedling planting mechanism based on up-film transplanting[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(3): 30-33. (in Chinese with English abstract)
[27] Liu Jiaodi, Cao Weibin,Tian Dongyang, et al. Kinematic analysis and experiment of planetary five-bar planting mechanism for zero-speed transplanting on mulch film[J]. International Journal of Agricultural and Biological Engineering, 2016, 9(4): 84-87.
[28] 陈学庚,赵岩. 棉花双膜覆盖精量播种机的研制[J]. 农业工程学报,2010,26(4):106-112.
Chen Xuegeng, Zhao Yan. Development of double-film mulch precision planter for cotton seeding[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(4): 106-112. (in Chinese with English abstract)
[29] 李革,艾力·哈斯,康秀生,等. 地膜播种机螺旋覆土滚筒的参数优化[J]. 农业工程学报,2003,19(6):135-137.
Li Ge, Aili·Ha Smu, Kang Xiusheng, et al. Parametric optimization of the spiral cylinder of a plastic film mulch seeder[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2003, 19(6): 135-137. (in Chinese with English abstract)
[30] 封俊,顾世康,曾爱军,等.导苗管式栽植机的试验研究(Ⅱ)栽植机的性能评价指标与检测方法[J]. 农业工程学报,1998,14(2):73-77.
Feng Jun, Gu Shikang, Zeng Aijun, et al. Study on transplanter with chute and seedling aid springs (PartⅡ): Judging-targets system for transplanters[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 1998, 14(2): 73-77. (in Chinese with English abstract)
[31] 王永维,唐燕海,王俊,等. 蔬菜钵苗高速移栽机吊杯式栽植器参数优化[J]. 农业机械学报,2016,47(1):92-97.
Wang Yongwei, Tang Yanhai, Wang Jun, et al. Parameter optimization for dibble-type planting apparatus of vegetable pot seedling transplanter in high-speed condition[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(1): 92-97. (in Chinese with English abstract)
[32] 王君玲,高玉芝,李成华. 机械化移栽裸根苗的直立率试验研究[J]. 农机化研究,2007(2):146-148.
Wang Junling, Gao Yuzhi, Li Chenghua. Experimental study of mechanized transplanting bare root upright degree[J]. Journal of Agricultural Mechanization Research, 2007(2): 146-148. (in Chinese with English abstract)
[33] 张国忠,许绮川,潘玉龙,等. 影响机械移栽钵苗直立度合格率试验研究[J]. 华中农业大学学报,2004,12(5):463-465.Zhang Guozhong, Xu Qichuan, Pan Yulong, et al. Influence of mechanical transplanting pot seedling upright degree qualification rate of experimental research[J]. Journal of Huazhong Agricultural University, 2004, 12(5): 463-465. (in Chinese with English abstract)
[34] 杨丽,苏益明,张东兴,等. 玉米纸筒苗移栽机运动轨迹分析与性能试验[J]. 农业工程学报,2014,30(13):35-41.
Yang Li, Su Yiming, Zhang Dongxing, et al. Motion analysis and performance test of corn paper pot seedlings transplanter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(13): 35-41. (in Chinese with English abstract)
Development of 2ZXM-2 automatic plastic film mulching plug seedling transplanter for vegetable
Li Hua1,2, Cao Weibin1※, Li Shufeng1, Liu Jiaodi1, Chen Bangbang1, Ma Xiaoxiao1
(1. College of Mechanical and Electrical Engineering, Shihezi University, Shihezi 832003, China; 2. The State Key Laboratory of Mechanical Transmissions, Chongqing University, Chongqing 400044, China)
Xinjiang has the adequate light and large temperature difference between day and night, and its unique light and heat resources are very suitable for crop growing, such as tomato and pepper; the planting area and productivity of Xinjiang have been ranked the first in China for many years. But due to special climatic conditions in Xinjiang area, crops are generally transplanted on the plastic film, and also need to lay a drip belt. In recent years, Xinjiang has begun to vigorously promote the crop transplanting technology, and the transplanting area of tomato and pepper has continued to increase. However, at present, there are no automatic vegetable transplanting machines available in Xinjiang, and the seedlings transplanting work basically relies on manual operation; some transplanters used are mainly semi-automatic machines, which still need manual work to pick up seedlings and drop seedlings, and also need laying the film and drip irrigation before transplanting, as well as the additional press and soil covering operations after the transplanting. Therefore, it is very important and urgent to study the multi-functional automatic transplanter for plug seedling in Xinjiang. In this paper, the 2ZXM-2 automatic plastic film mulch plug seedling transplanter for tomato and pepper was developed to replace the manual operation and semi-automatic machines transplanting. The mechanism mainly consisted of the frame, the laying film device, the soil covering and pressing mechanism, the automatic seedling pick-up mechanism, the planting mechanism and the automatic seedling feeding system which can feeding seedlings accurately for the pick-up mechanism. The transplanter designed not only can complete automatic seedling transplanting and soil covering and pressing at one time, it can also lay drip irrigation belt and plastic film at the same time. With the 2ZXM-2 automatic plastic film mulch plug seedling transplanter, it is very convenient to complete the multi-channel working procedure of transplanting, and it can also be applied to the transplanting of different crops. In order to verify the performance of automatic transplanter, the test prototype was made and the pepper field transplant experiment was carried out in the Key Laboratory for Xinjiang Production and Construction Corps Agricultural Machinery. The test results showed that when the speed of the machine was 2.8 km/h, the theoretical plant spacing was 20 cm, and the transplanting frequency reached 62 plants/(min·row), the qualified rate of seedlings was 96.3%, the leakage rate of seedlings was 2.8%, the seedling injury rate was 1.25%, the qualified rate of transplanting depth was 93.5%, the qualified rate of the plant spacing was 94.7%, the spacing variation coefficient was 7.9%, and the qualified rate of transplanting achieved 93.4%. Meanwhile, in the process of transplanting test, the drip irrigation pipe was laid and had not been damaged and bent at all again, and the performance of mulch film laying and soil covering was also excellent; by statistics and calculation, the flattening degree of plastic film lighting surface reached 98.2%, the qualified rate of plastic film lighting surface width achieved 97.8%, and the average mechanical damage degree of film surface was only 3.4 mm/m2. Therefore, the performance indices of 2ZXM-2 automatic plastic film mulch plug seedling transplanter can perfectly meet the agronomic requirements of pepper seedling transplanting. In conclusion, the research for this transplanter not only provides some theoretical basis and reference for the study of automatic dry land transplanter in China, and it also has important significance for the development of mechanized seedling transplanting technology in Xinjiang.
agricultural machinery; transplants; automation; plug seedling; test
10.11975/j.issn.1002-6819.2017.15.003
S223.9
A
1002-6819(2017)-15-0023-11
2017-02-08
2017-06-27
国家自然科学基金(51765059);新疆兵团科技援疆项目(2013AB024);新疆兵团青年基金(2014CB012);机械传动国家重点实验室开放基金(SKLMT-KFKT-201612)
李 华,男(汉族),副教授,博士生,主要从事农业机械设计与自动化技术研究。石河子 石河子大学机械电气工程学院,832003。
Email:shzdxlh@126.com
※通信作者:曹卫彬,男(汉族),教授,博士生导师,主要从事农业信息化与机械自动化技术研究。石河子 石河子大学机械电气工程学院,832003。Email:Wbc828@163.com
猜你喜欢
农机质量与监督(2022年8期)2022-09-13
农业与技术(2022年9期)2022-05-17
新疆农机化(2021年5期)2021-10-24
农机质量与监督(2021年5期)2021-07-02
种子(2020年6期)2020-07-09
农业科技与装备(2019年6期)2019-02-10
现代园艺(2018年1期)2018-03-15
农民致富之友(2017年12期)2018-01-31
农业科技与装备(2017年3期)2017-06-27
农业知识(2017年9期)2017-04-10