
基于三元阵声纳的强干扰抑制技术研究
2017-09-12 06:08:05吕曜辉孙大军黄海宁孙英棣
中国电子科学研究院学报 2017年4期
吕曜辉,孙大军,黄海宁,孙英棣
(1.哈尔滨工程大学 水声技术重点实验室,哈尔滨 150001; 2.中国科学院声学研究所 水声工程中心,北京 100190)
基于三元阵声纳的强干扰抑制技术研究
吕曜辉1,2,孙大军1,黄海宁2,孙英棣1
(1.哈尔滨工程大学 水声技术重点实验室,哈尔滨 150001; 2.中国科学院声学研究所 水声工程中心,北京 100190)
为了提高三元阵被动声纳在水下强干扰下对弱目标的检测性能,文章提出了一种基于三元阵的水下强干扰子空间剔除的抑制算法。算法对强干扰和弱目标分别采用了两种不同的快照数进行处理,用较短的时间估计运动强干扰的干扰空间,采用正交投影的办法从原始信号中去除强干扰;对得到的信号作时间累积,通过自适应波束形成算法或常规波束形成算法实现对弱目标地检测。根据海试数据的处理结果表明,文中建立的算法可以有效地将运动强干扰从接收到的原始信号中剔除,实现了干扰抑制作用,提高了运动强干扰下三元阵声纳对弱目标的检测性能。
强干扰抑制;弱目标检测;波束形成;三元阵被动声纳
0 引 言
三元阵声纳的探测性能更多地是受到水面船只的影响,以及繁忙航线的监测,可以说主要的噪声源就是水面的各种船只。在较短的时间内,干扰可能会经过多个波束,从而导致严重的非平稳噪声,使得算法无法获得足够的快照以估计阵列协方差矩阵。对于自适应波束形成来讲,这意味着干扰会很快移出权响应的零陷区域,干扰功率将泄漏到观测波束,从而影响对弱目标的检测。
如果运动强干扰和弱目标同时存在,为了检测弱目标,通常将采用较长的时间以积累快照数,但是由于强干扰的快速运动,干扰将经过多个波束(比如经过弱目标所在波束),从而掩盖弱目标。我们知道目标功率越强,则目标越容易被估计,所需用来估计目标的快照数越少。反之目标功率越弱,则目标越难被估计,这时就需要较多的快照数(相当于增加信噪比)来检测弱目标。因此对于强干扰和弱目标可以采用两种速率来处理,即用较少的快照数对强干扰进行估计并抑制,然后对抑制干扰后的数据进行长时间的积累以检测弱目标。该算法从特征空间的角度出发,首先用较短的时间估计运动干扰对应的干扰空间,通过正交投影的办法从原始信号中去除干扰信号,然后对去除干扰以后的信号作长时间积累,最后采用通常的自适应波束形成或者是常规波束形成算法进行弱目标的检测。
1 三元阵被动测向原理
一个目标辐射噪声,被看作点声源,离声源远处处置两个接收水听器,间距为d,点源与接收水听器间的间距为r,两个水听器接收信号x1(t,r)和x2(t,r)的互相关函数Rx1x2(τ,d)为:
(1)
称为信道中点源声场的时空相关函数。横杆表示为时间平均。若取r轴与声传播方向垂直,则(1)式称为横向时空相关函数[1-4]。
假设目标是点源,声波按球面波方式传播,三元等间距阵被动测距模型如图1所示。

图1 三元阵测距模型
图中S为声源,1、2、3分别表示被动声纳的三个阵元。设三元等间距阵间距为d,目标方位为θ,目标到各阵元的距离分别为r1、r2、r3,其中,r2即为要测定的目标距离r。
设在极坐标系中,点源目标的坐标为S(r,θ),3个阵元的坐标分别为1:(d,π),2:(0,0),3:(d,0),则目标到三个阵元的距离为:
r2=r
(2)
设声速为c,则目标信号到达各个阵元的时延差分别为
(3)
其中,τ12表示阵元1、2接收信号的时间差,τ23表示阵元2、3接收信号的时间差,阵元1、3接收信号的时间差τ13为两者之和。将式(1)代入式(3)得到:
(4)
(5)
将式(4)、式(5)移项后两边平方,整理可得到:
(6)
(7)
将式(6)和式(7)相除后,整理可得目标方位的精确估计:
(8)
2 基于子空间剔除的强干扰抑制原理
通常,窄带信号的阵列协方差矩阵可以采用如下表示[5-9]:
(9)
其中R0为平稳分量。R1为非平稳分量,通常对应着快速变化的环境噪声,如快速运动的船只等。这些船只由于距离声阵较近,其功率很大,而且运动的速度很快。假设有K个强干扰存在,算法包括两个阶段:第一个阶段,用较少的快照数L1估计干扰并抑制(快照数必须大于干扰个数L1>K);第二个阶段,对抑制干扰后的数据进行累积,检测弱目标。
首先阵列输出的时域信号x(t)经过FFT变换到频域,得到最新频域快照。假设X1(f),…,XL1(f)为频率点f处的阵列输出快照,其中XL1(f)为最新得到的快照数据。为方便起见,在以后的叙述中我们将略去f,可以得到阵列协方差矩阵如下:
(10)

(11)
假设Z1,…,ZL2为干扰抑制后的快照数据,其中ZL2为最新得到的快照数据,于是我们得到以下协方差矩阵:
(12)
这里需要注意的是,L2可以小于L1,但是这并不是说,检测弱目标需要的时间可以小于抑制干扰所需的时间。从(10)式可以看到,要得到快照ZL2,必须要有L1个快照X1(f),…,XL1(f)来估计干扰空间,L2个快照Z1,…,ZL2,实际上是用到了X2-L2(f),…,X1(f),…,XL1(f)的信息。因此检测弱目标需要的时间必须大于抑制干扰所需的时间,即L1+L2-1>L1。
前面提到需要L1个快照估计K个强干扰,这里我们将通过仿真计算说明抑制强干扰所需要的快照个数。假设环境噪声为各向均匀同性的白噪声,并且只有一个干扰,则阵列协方差矩阵可以如下表示:
(13)
Rz=(I-uuH)R(I-uuH)
(14)
于是抑制前后,干扰方位上的波束形成功率分别为:
(15)
(16)
以上结论为理想情况,实践中我们仅能获得有限的快照数。假设有L个快照数据,则可以得到估计的阵列协方差矩阵为:
(17)
同理,干扰抑制后的阵列协方差矩阵为:
(18)
于是抑制前后,干扰方位上的波束形成输出功率分别为:
(19)
(20)
下图为该算法的信号处理框图。
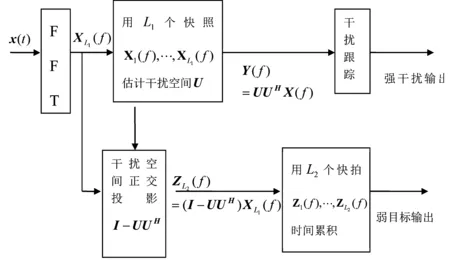
图2 强干扰抑制算法框图
3 试验结果
为了验证基于三元阵的水下强干扰子空间剔除抑制技术的实际效果并将其应用于处理海试数据。三元阵阵形结构如下所示:

图3 三元阵被动声纳接收系统示意图
舷侧阵被动测距声纳系统安装示意图如图3。每舷有三个基阵,等间距分布。假设仿真条件为阵间距d=20 m,每个阵有11个基元,基元间距D=5.625 cm。海试数据的处理结果如下:

图4 未使用强干扰抑制算法的试验数据处理结果
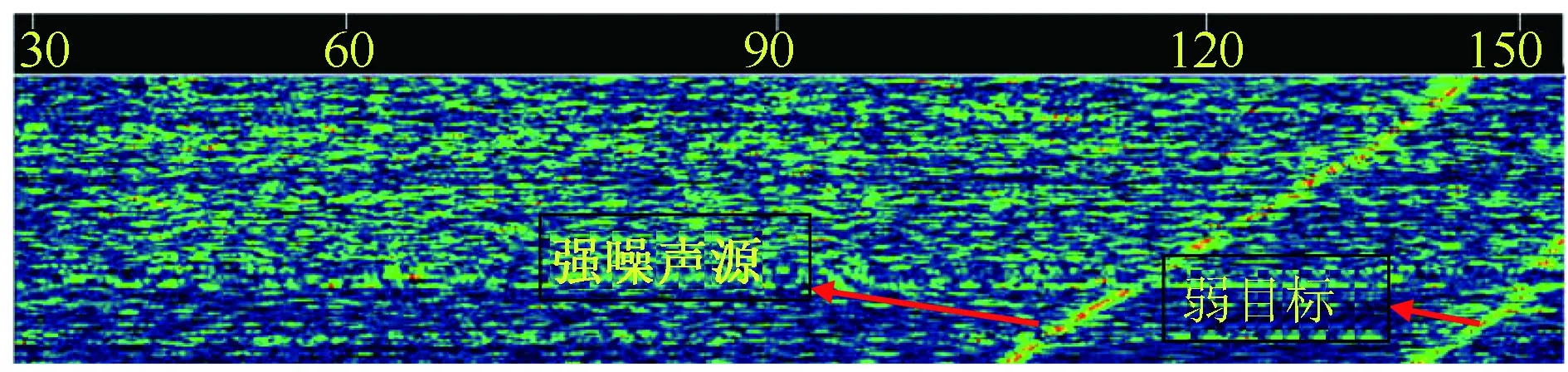
图5 使用强干扰抑制算法的试验数据处理结果
图4是未采用强干扰子空间剔除算法处理的海试数据处理结果,从图中可以看出在接近于航行器尾部的区域有强目标出现,弱目标与强目标的旁瓣混杂在一起不能予以区分。图5是采用强干扰子空间剔除算法处理的海试数据处理结果,从图中可以看出弱目标与强目标的处理后的检测门限基本一致,强目标的旁瓣基本被抑制干净,可以清晰地对目标进行区分。由海试数据处理结果可以表明强干扰子空间剔除算法对三元阵声纳有良好的处理效果。
4 结 语
本文主要讨论了基于三元阵的运动强干扰的抑制问题。首先介绍了三元阵测向原理及子空间干扰抑制算法,分析了快照数对干扰抑制性能的影响。根据海试数据的处理结果表明,文中建立的算法可以有效地将运动强干扰从接收到的原始信号中剔除,实现了干扰抑制作用,提高了水下强干扰干扰下三元阵声纳弱目标的检测性能。
[1] 梅继丹.噪声目标被动测向问题研究[D]. 哈尔滨:哈尔滨工程大学硕士学位论文, 2006.
[2] 梅继丹,惠俊英,王逸林,余赟,周伟.Bartlett波束形成的波束零限权设计[J]. 2008, 29(12):1316-1318.
[3] 吕曜辉.互谱法被动测距研究[D].哈尔滨:哈尔滨工程大学工学硕士学位论文,2006.
[4] 鄢社锋,马远良.传感器阵列波束优化设计及应用[M].北京:科学出版社,2009:1-153.
[5] 李启虎.声纳信号处理引论(第二版)[M].北京:海洋出版社,2000,334-340.
[6] Y.Wang, J.Li, P.Stoica.” Rank-deficient robust Capon filter bank approach to complex spectral estimation”. IEEE Trans. Signal Processing, 2005,53(8), 2713-2726.
[7] G.. Clifford Carter. Time delay estimation for passive sonar signal processing. IEEE Trans. on Acoustics, Speech, and Signal Processing. 1981, ASSP-29(3): 463-469.
[8] C. H. Knapp, G.C. Carter. The generalized correlation method for estimation of time delay. IEEE. Trans. Acoust. Speech Signal Process. Vol. Assp-24. 1976(8): 320-327.
[9] Z.-S.Wang, J. Li, R.-B.Wu.” Time-delay-and time-reversal-based robust capon beamformers for ultrasound imaging”. IEEE Trans. Medical Imaging, 2005,24(10):1308-1322.
Research on Noise Subspace Culling Based on Three-Element Array Sonar
LV Yao-hui1,2,SUN Da-jun1,HUANG Hai-ning2, SUN Ying-di1
(1. National Laboratory of Underwater Acoustics Technology ,Harbin Engineering University , Harbin 150001,China; 2. Underwater Acoustic Engineering Center, Institute of acoustics Chinese Academy of Sciences,Beijing 100190, China)
In order to improve the performance of the three-element passive sonar for weak target detection under strong underwater noise sources, a suppression algorithm based on three-element array is proposed to eliminate the strong noise source subspace. The algorithm uses two different snapshots to deal with the strong noise source and the weak target respectively. The interference space of the strong noise source is estimated in a short time. The strong noise source is removed from the original signal by orthogonal projection. The resulting signal is integrated for a long time and detected by an adaptive beamforming algorithm or a conventional beamforming algorithm. According to the results of the sea experimental data, it is shown that the proposed algorithm can effectively remove the strong noise source from the
original signal, and achieve the interference suppression effect, The algorithm improves the detection performance of the weak target with three- element sonar under the strong noise source.
strong noise source suppression; subspace culling; three-element passive sonar
10.3969/j.issn.1673-5692.2017.04.014
2017-06-18
2017-07-26
自然科学基金(No.61501133)

吕曜辉(1982—),男,博士, 副研究员,主要研究方向为水声信号处理;
E-mail: lyh@mail.ioa.ac.cn
孙大军(1972—),男,教授,主要研究方向为水声信号处理;
黄海宁(1969—),男,研究员,主要研究方向为水声信号处理;
孙英棣(1992—),男,博士,主要研究方向为水声信号处理。
TB566
A
1673-5692(2017)04-406-04
猜你喜欢
天津科技(2022年5期)2022-05-31 02:18:08
考试与评价·八年级版(2020年5期)2020-10-29 05:42:35
装备制造技术(2020年12期)2020-05-22 09:24:54
军工文化(2019年12期)2019-03-31 09:24:58
电子测试(2018年14期)2018-09-26 06:04:12
环球时报(2017-11-09)2017-11-09 11:27:45
船舶经济贸易(2017年8期)2017-08-30 14:36:14
网络安全和信息化(2017年3期)2017-03-10 07:45:51
火控雷达技术(2016年2期)2016-02-06 02:29:03
网络安全和信息化(2015年11期)2015-03-17 21:54:44
