
基于ARM的汽轮机阀门控制器设计
2017-09-09 10:17宋华伟戴曙光杨得甫
软件导刊 2017年8期
宋华伟+戴曙光+杨得甫

摘 要:智能阀门控制系统逐渐取代传统的机械式阀门控制系统,被广泛应用于现代工业控制领域。为了进一步提高控制器的控制性能,基于ARM架构,研制了一款新型智能阀门控制器。介绍了该控制器的主要组成部分和关键技术。控制器采用高精度的線性可调差接变压器作为阀门位置传感器,利用快速响应的软件编程技术,提高了智能阀门控制器的定位精度和响应速度。测试表明,该仪器具有功耗低、可靠性高等优点,对相关产品的研制有重要指导意义。
关键词:ARM;智能阀门控制器;人工交互;快速采集芯片
DOIDOI:10.11907/rjdk.171307
中图分类号:TP319
文献标识码:A 文章编号文章编号:1672-7800(2017)008-0073-03
0 引言
随着工业自动化的快速发展,微电子技术和先进算法逐步应用于电动阀门控制中,阀门控制系统开始向智能化、高效化和精确化方向发展,设备安全性能[1-4]得到提高。
基于ARM设计的智能阀门控制器,采用自动检测输入输出短路和断路功能的硬件电路,软件设计突出超快速响应理念,整体采用优化设计,大大缩短了响应时间,降低了电路总功耗[5]。测试数据表明,从输入指令变化到伺服电流的输出变化时间小于20ms,达到国内领先水准。
1 控制器整体设计
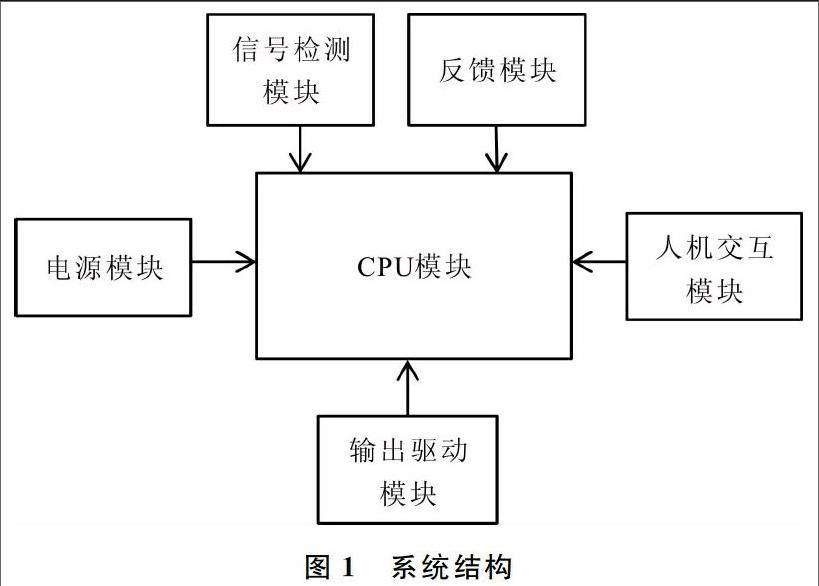
新型智能阀门控制器系统由CPU模块、电源、信号检测(LVDT位移传感器)、反馈(输出电路短路和断路检测)、输出驱动和人机交互(上位机与工作状态灯)等部分组成,系统结构如图1所示。
智能阀门控制器通过人机交互模块的上位机人工输入阀门控制信号,通过信号检测模块的信号采样电路得到直流或交流反馈输入信号,经A/D处理后进入CUP模块,经过PI算法调节得到输出信号,经输出驱动模块给出伺服电流输出,同时CPU模块将采集到的阀门指示信号传输给上位机。
电源模块采用外部供电,通过电源调理电路分别产生3.3V、5V、-15V和+15V等几组电压,供CPU、外设硬件电路及驱动电路使用。电源模块采用综合调制技术,不仅降低了静态电流消耗,而且实现了输出电流值根据负荷大小自动调整的功能[6-7]。
人机交互模块包含上位机与LED指示灯,是实现人机信息和数据交互的窗口,可以完成变量和相关参数的初始值设置及实时显示等功能。
2 硬件设计
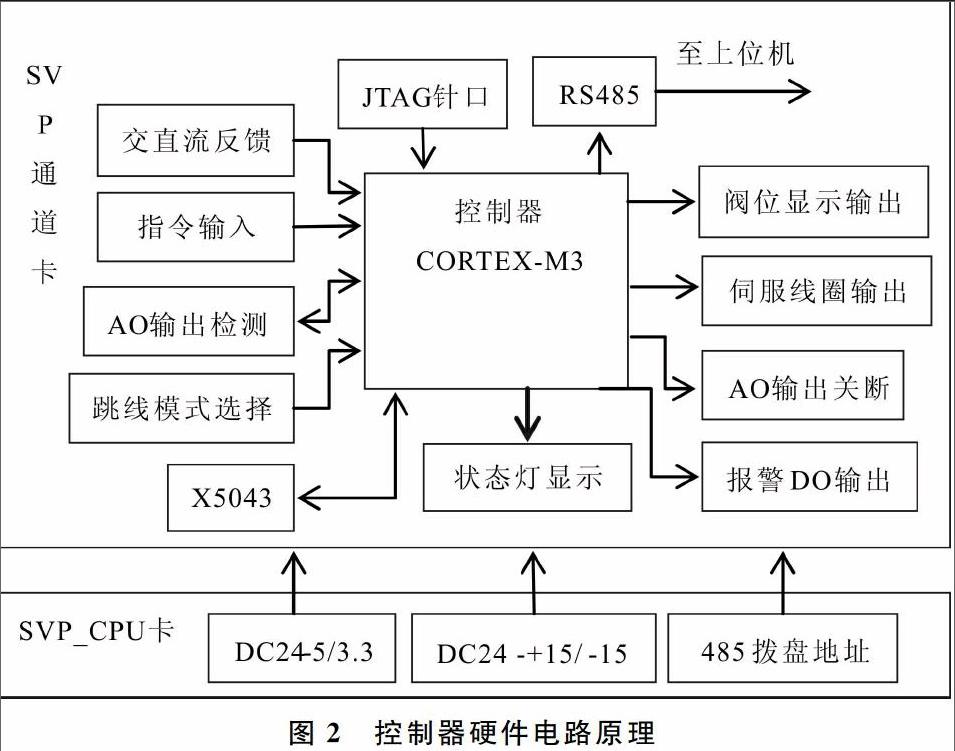
智能阀门控制器的硬件电路由SVP通道卡和SVP_CPU卡组成,CPU卡提供电源接入、电源隔离与降压及485通讯等功能。通道卡作为主要电路部分,提供主控芯片和各通道输出输入电路、程序烧写接口、跳线选择及状态指示等功能。硬件电路原理如图2所示。
各单元电路组成及功能如下:
(1)交直流反馈电路主要用于采集LVDT的阀门位置信号,分为六线制的交流电压输入信号和两线制的直流电流输入信号。其中采集到的交流电压输入信号比较微弱,要经过整流、滤波以及补偿之后才能送入CPU,为此设计了交流LVDT反馈调理电路来处理输入信号。
交流LVDT反馈调理电路,将采集的交流输入信号先经过交流全波整流调理,然后添加+5V电平补偿,把整流后的电压控制在0~10V,再经过比例缩小到0~2V,最后把缩小的电压值差分进AD芯片进行信号采样,由SPI通讯与CORTEX-M3交换数据。
(2)LVDT初级绕组必须由交流电压供电。铁磁性磁芯位置变化引起同名端反向串联的2个次级绕组之间感应电压之差发生变化[8],通过检测电压差就可以确定非铁磁杆的移动量。为驱动LVDT正常工作,特别设计了六线制LVDT激励产生电路。
六线制LVDT激励产生电路由波形发生器芯片产出频率为1KHZ的正弦波,经过放大器芯片进行功率放大,最后产生幅值为±9V的激励电压来带动交流LVDT运行。
(3)伺服输出电路用于输出高电流驱动负载工作。首先由DA芯片产生输出电压,然后经过调理电路处理转为正负值电压,最后经运放调理电路用于驱动负载。伺服输出电路中设有输出关断开关,可以在线路出现故障时快速关断伺服输出电流,起到保护驱动器的作用。
(4)交流反馈断路和短路检测电路用于检测反馈信号的接线是否正常。该电路设计原理是将反馈电路两端的信号进行差分幅值运算,然后将运算结果与特定电压比较(2V左右)。如果接线正常,信号到达光耦后必然有脉冲波形输出;如果遇到电路短路或断路则没有脉冲输出,以此判断反馈电路的接线情况,这是该电路设计的难点。
(5)为了检测伺服输出电路接线是否正常,同样也设计了伺服输出电流断路和短路检测电路。该电路是把伺服输出电路的接线端子两端接入电路,经过运放进行比例缩小幅值,由电压补偿提高,最后进入AD差分端电压,用此电路可实时检测接线端子的电压差。将采样电压与正常电压相比较,根据采样信号超出或低于正常电压来判别电路是处于断路或短路状态。
(6)针对控制器的运行安全问题,利用X5043器件做了开门狗处理,使控制器运行出现问题时单片机能够及时复位,并且在第一时间采取输出关断处理[9]。
3 软件设计
SUPMAX2000智能阀门控制器程序主要由系统软件和上位机软件组成。
3.1 系统软件
系统软件由管理模块、控制模块和通道模块等几部分组成。管理模块主要完成系统监控和初始化任务,同时还具有CPU、所用外设和外围A/D、D/A芯片等设置和初始化、系统自检以及卡件自校准、卡件标定等功能。控制模块是软件设计的核心和关键环节,主要完成数据采集与处理、伺服输出等核心任务。通信软件包括总线与通道板CPU之间遵循SPI协议的通信,以及CPU与片外EEROM芯片之间遵循I2C协议的串行数据通信,标定模式下采用的UART通信等[10-12]。两者都采用主从方式工作,以中断方式进行数据的发送和接收,既确保了数据的实时传输,又提高了CPU的工作效率。endprint
现场应用要求控制器能调试、能正常使用,同时还需要调零调满,有些装置控制还要细调。为此,在主程序中设置了正常模式、调试模式、自校正模式、输出细调模式。
主程序流程如图3所示。
3.2 上位机软件
上位机实现参数标定和通讯等功能。参数标定是上位机软件设计的重点,其工作原理是输入或输出的电流值通过串口通信发送给上位机,电流值经过上位机算法标定后下发给SVP卡,SVP卡接收到新的标定参数后再次进行数据转换,转换的数据如果已经满足精度要求则标定结束,否则继续上述过程。在重试一定次数后,当参数的精度满足要求时则标定结束,否则认定此SVP卡无法标定。
控制器通过RS485与上位机实现通讯。通讯前需要对RS485通讯的端口号、波特率和停止位等进行配置[13]。通訊时根据上位机下发的不同指令实现控制器数据的读取、修改以及主程序运行模式的切换,并将控制器的状态报警显示在上位机界面上。上位机软件流程如图4所示。
4 系统设计关键技术
为满足现场设备需求,加快系统运行速度,采用快速采集芯片AD7190,实测数据显示采样时间为2ms,加上控制器对参数的处理时间和电流输出控制时间,从控制指令输入到伺服输出变化的系统响应时间小于20ms,远远领先国内水平。本产品与同类产品的响应时间对比如表1所示。
为了节省硬件资源和控制器成本,对A/D配置进行了灵活处理。设计过程中将不需要的通道暂时关闭,同时对时间要求不严格的通道,比如输出接线检测采用轮询方式。在运行参数存入存储器的过程中作了多次校验处理,均没有出现问题。
5 结语
智能化阀门控制器是现代过程控制系统中的核心部件之一[14],发展新型智能阀门控制器具有重要的战略意义。
本文研发的智能阀门控制器属于实用新型产品,具有优良的超低功耗性能和很高的自检测能力,其采用独特的快速响应设计,不仅提高了产品运行的可靠性,也降低了生产成本,提升了产品的市场竞争力,为推动国产新型智能阀门控制器产业发展起到了积极作用。
参考文献:
[1] 黄春英.新型阀门电动执行机构的研究与开发[D].大连:大连理工大学,2002.
[2] 胡寿松.自动控制原理[M].第3版.北京:国防工业出版社,1999.
[3] 陆会明.控制装置与仪表[M].北京:机械工业出版社,2011.
[4] 郝仲鸿.浅谈智能阀门定位器[C].第七届中国石油和化工自动化技术年会论文集,2008.
[5] 蔡明,白雪莲,章英.国产新型智能阀门定位器的设计[J].自动化仪表,2011,32(7):73-79.
[6] 杨艺伟.基于ARM的电动阀门控制器研究[D].太原:太原科技大学,2014.
[7] R BROWN.CortexTM-M3 (revisio:rlpl)technical reference manual[M].ARM Limited,2006.
[8] 马敬敏.基于Multisim 10的RC桥式正弦波振荡电路仿真分析[J].渤海大学学报:自然科学版,2012,33(4):324-328.
[9] 梁海峰.智能阀门控制器的嵌入式设计与开发[D].上海:上海交通大学,2007.
[10] 陶永华.新型PID控制及其应用[M].第2版.北京:机械工业出版社,2003.
[11] 王威.智能PID控制方法的研究现状及应用展望[J].自动化仪表,2008,29(10):1-7.
[12] 王立新.模糊系统与模糊控制教程[M].北京:清华大学出版社,2013.
[13] 林惠.智能电气阀门定位器的研究开发[D].天津:天津大学,2003.
[14] PAUL SCHERZ.实用电子元器件与电路基础[M].第2版.北京:电子工业出版社,2009.endprint
