
MEMS电容式陀螺仪的设计
2017-09-08 06:54张琼
电子技术与软件工程 2017年14期
文/张琼
MEMS电容式陀螺仪的设计
文/张琼
本文设计了一种静电梳齿驱动、差分电容检测的MEMS陀螺仪,结构采用双质量块对称设计,能够有效抑制轴向加速度的干扰。利用Ansys对MEMS陀螺仪进行了仿真分析,在模态仿真中分析了陀螺结构的固有频率与振型;在静态仿真中,分析了陀螺结构在X方向、Y方向及Z方向受到50G冲击载荷时的应力分布情况,保证了弹性梁等危险区域可以承受一定的冲击载荷。
MEMS陀螺仪 Ansys仿真 结构设计
1 引言
陀螺仪是测量角速度的惯性器件,由微电子机械系统(MEMS)技术所加工的微机械陀螺仪在体积、重量和功耗上的优势,使其能在许多应用领域可以有广泛的应用。多年来,随着MEMS技术的发展,理论上的一系列研究及加工技术的进步,MEMS陀螺仪取得了更好的进展。本文设计了一种静电梳齿驱动、差分电容检测的MEMS陀螺仪,结构采用双质量块对称设计,能够有效抑制轴向加速度的干扰。
2 结构设计
本文所设计的MEMS陀螺仪结构示意图如图1所示,x轴为驱动方向、y轴为检测方向,结构采用双质量块对称设计,静电梳齿驱动,图1中1、4、7部分为左、右驱动器及中间驱动器,在固定梳齿的驱动下,可动梳齿受到周期性的作用力,从而使质量块1、质量块2在作周期性的受迫振动,其振动位移与驱动量成正比,使陀螺仪可以有较好的线性度。
当MEMS陀螺仪处于正常的工作状态时,驱动质量块1与质量块2在静电梳齿的驱动下沿水平X方向做相对运动,当有Z方向角速度 输入时,两检测质量块1、2在哥氏力的作用下沿Y方向做反方向振动,检测电容C1、C2改变,C1、C2变化量大小相同、方向相反,并与角速度信号成正比。因此通过检测电容C1、C2的变化量,就可以得到Z方向输入的角速度 。
对于单质量块陀螺仪,轴向加速度会对其工作带来严重的干扰,本文所设计的MEMS陀螺仪对于轴向加速度可以很好的抑制。
当陀螺仪工作时,两个质量块在固定梳齿的激励下相对运动,质量块1和质量块2的运动方程为:

表1:单晶硅的材料参数

当陀螺仪受到X方向的加速度时,两个质量块在其作用下,运动方程为:

当系统有角速度Ω输入时,哥氏力大小为:

因此在两个检测质量块上耦合的加速度为:
由式(6)和(7)可以看出,两个检测质量块受到的加速度分为两部分,第一部分为设计所需要的部分,它们在两个式(4)和(5)中的相位相反;第二部分为系统加速度引起的干扰项,它们在方程中的幅值、相位相同。由于差分检测电容反相位信号会相叠加,同相位信号相互抵消,可以抑制X方向的加速度干扰信号。
当陀螺仪受到Y方向(或Z方向)的加速度时,由图1的结构可以看出,C1、C2同时增大或减小相同的值,差分检测电容使输出不受加速度信号的影响。
由以上分析可知,MEMS电容式陀螺仪能够很好的抑制轴向加速度的干扰。
3 仿真分析
3.1 模态仿真分析
Ansys模态仿真分析可以确定MEMS 陀螺仪的模态参数。MEMS 陀螺仪仿真所用的材料属性设定如表1所示。
运用Ansys15.0对MEMS 陀螺仪进行了六阶模态分析,得到前六阶模态频率如表2所示。
图2为MEMS 陀螺仪的一阶驱动模态,图3为二阶检测模态,两工作模态频率相差169.9Hz,可以满足陀螺对频率匹配要求,前两阶工作振型频率高于2000Hz ,可以使陀螺不容易受到环境噪声(< 2000Hz )的干扰。
3.2 静态仿真分析
Ansys静态仿真是用于分析陀螺仪在静力载荷作用下应力情况,保证弹性梁等危险结构可以承受一定的冲击载荷。仿真时在结构的X方向施加50G的载荷时,其应力分布云图如图4所示,其最大应力为7.13 MPa,危险区域为驱动梁的末端;在结构的Y方向施加50G的载荷时,其应力分布云图如图5所示,其最大应力为6.64 MPa,危险区域为检查梁的末端及转折部分;在结构的Z方向施加50G的载荷时,其应力分布云图如图6所示,其最大应力为1.74 MPa,危险区域为驱动梁的转折部分,各个方向的最大应力都远远小于硅的许用应力。
通过以上分析可以得到,本文所设计的MEMS陀螺仪可以承受一定的冲击。
4 总结
本文设计了一种静电梳齿驱动、差分电容检测的MEMS陀螺仪,结构采用双质量块对称设计,采用x轴方向驱动、y轴方向检测的工作方式,能够有效抑制轴向加速度的干扰。利用Ansys对MEMS陀螺仪进行了模态与静态仿真分析,验证了MEMS陀螺仪设计的合理性。

图1:MEMS电容式陀螺仪结构示意图
图2:陀螺结构的第一阶模态云图
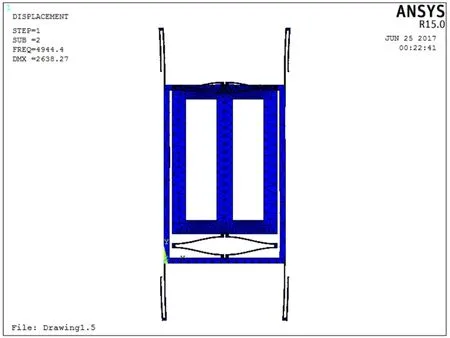
图3:陀螺结构的第二阶模态云图
图4:X方向施加50G载荷时结构的应力分布云图
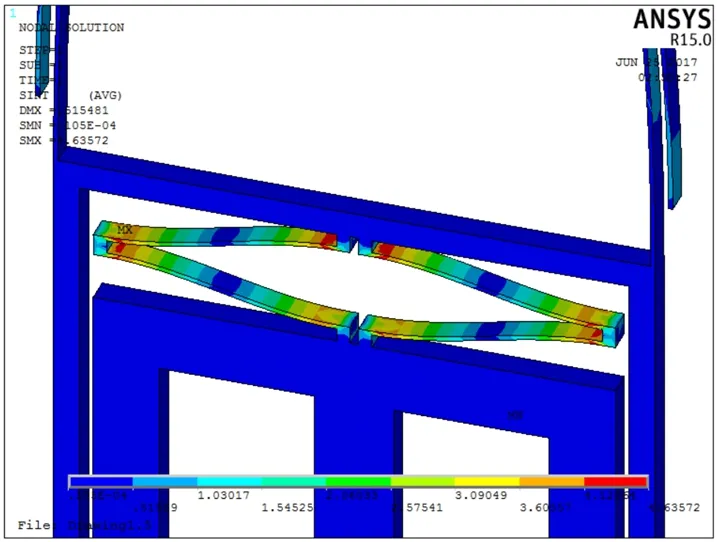
图5:Y方向施加50G载荷时结构的应力分布云图
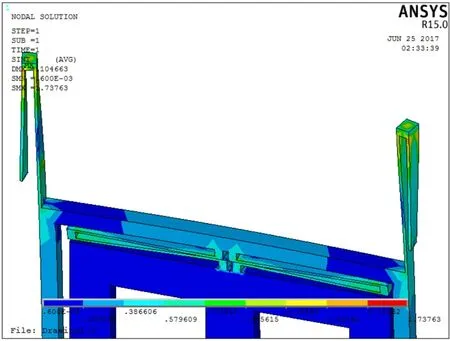
图6:Z方向施加50G载荷时结构的应力分布云图
[1]Said Emre Alper,Tayfun Akin*. Symmetrical and decoupled nickel Microgyroscope on insulating substrate[J].Sensors and Actuators AIIS,2004:336-350.
[2]Said Emre Alper*,Kanber Mithat Silay, Tayfun Akin.A LOW cost rate grade nickel Microgyroscope[J].Sensors and Actuators A132,2006:171-181.
[3]许昕,何杰等.微机械陀螺仪的新进展及发展趋势[J].压电与声光,2014,36(04):588-595.
[4]马宗敏.单芯片集成双惯性器件研究[D].太原:中北大学,2008.
[5]熊斌.栅结构微机械振动式陀螺仪[D].江苏:东南大学,2001.
[6]管继平.梳状音叉双线振动硅微机械陀螺仪的技术研究[D].电子科技大学,2011.
[7]谭秋林,石云波等.具有栅结构与静电梳齿驱动的电容式微机械陀螺的仿真、设计与测试[J].纳米技术与精密工程,2011,09(03):207-211.
[8]朱一纶,王寿容,裘安萍.微机械谐振陀螺的有限元分析[J].东南大学学报,2004,34(01):38-41.
作者单位 忻州师范学院 山西省忻州市 034000
张琼(1983-),女,山西省忻州市人。硕士学位。主要研究方向为电子技术,传感技术。
猜你喜欢
当代水产(2022年6期)2022-06-29
北京航空航天大学学报(2021年9期)2021-11-02
中国设备工程(2020年2期)2020-03-30
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
百科探秘·航空航天(2017年9期)2017-12-31
制造技术与机床(2017年11期)2017-12-18
启蒙(3-7岁)(2017年1期)2017-04-13
山东工业技术(2016年15期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
