基于XY·CN总线的嵌入式监控系统的设计
2017-09-03 06:08王波,张岩,谭磊
实验室研究与探索 2017年8期
王 波, 张 岩, 谭 磊
(北京理工大学 自动化学院,北京 100081)
基于XY·CN总线的嵌入式监控系统的设计
王 波, 张 岩, 谭 磊
(北京理工大学 自动化学院,北京 100081)

针对某些监控系统实时性要求高、长距离通信、节点众多、成本高等问题,利用XY·CN总线和虚拟仪器技术设计了一个嵌入式监控系统。该系统包含3个部分:PIC单片机分节点,ARM主节点和PC机。PIC单片机分节点将现场采集到的数据通过XY·CN现场总线发送给ARM主控节点,并接收总线的控制命令控制现场设备。ARM主节点通过XY·CN现场总线将各个分节点的数据收集并处理,然后通过以太网将数据发送至上位机。上位机采用在PC机上运行的虚拟仪器,用于存储、显示各个节点的数据。所设计的系统采用双绞线通信,并采用总线供电,具有实时性好,低成本,扩展灵活等特点。
监控系统; XY·CN总线; 虚拟仪器; 嵌入式
0 引 言
监控系统主要是通过对现场运行设备的监视和控制,以实现数据采集、设备控制、测量、参数调节以及各类信号分析、报警等功能[1-2]。现阶段,以太网与现场总线相融合是监控系统的主要形式,但是由于现场总线和以太网等的缺陷,在不同的应用场合,监控系统设计方案有很大不同[3-6]。本文针对某些监控系统实时性要求高、长距离通信、节点众多、成本高等问题设计了一个基于XY·CN总线的嵌入式监控系统。
1 XY·CN总线简介
XY·CN总线是一种带供电功能的设备端串行双总线通信系统,它具有通信总线供电、设备容量大、通信速率高、布线方便(RV1.5 mm双绞线)、抗干扰能力强等特点。单台设备可提供高达500 mA的电流。通过优化的中断方式,可保证400个设备组网情况下,任何设备事件上报时间小于50 ms,多点设备同时上报逐一提取,不会产生网络冲突[7-8]。
2 系统总体设计方案
利用XY·CN现场总线和虚拟仪器技术设计了一个嵌入式监控系统。该系统包含三个部分:PIC单片机分节点,ARM主节点和PC机。PIC单片机分节点将现场采集到的数据通过现场总线发送给ARM主控节点,并接收总线的控制命令控制现场设备。主控节点采用ARM处理器运行嵌入式实时操作系统,与各个分节点使用XY·CN总线通信,采集数据,发送联动控制命令,并将现场总线协议与以太网协议转化实现与上位机通信。上位机采用在PC机运行的虚拟仪器,用于存储、显示各个节点的数据以及发送查询命令、控制命令和联动命令。总体结构图如图1所示。
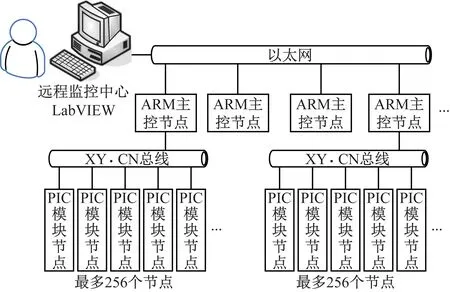
图1 系统总体结构图
3 系统硬件设计
系统硬件设计包括智能分节点硬件设计与ARM主节点硬件设计两部分。
3.1 智能分节点硬件设计
XY·CN总线为主从式的通信方式,分节点为从机,采用专用通信芯片XY001[9]。单片机选用PIC16F690,该芯片I/O的驱动能力强,工作状态功耗低,抗干扰能力强。图2为单片机与XY001组成的模块实物图。系统由总线供电,XY001将总线输入的电源转化为5 V输出,再经过二极管和RC滤波电路给单片机供电。
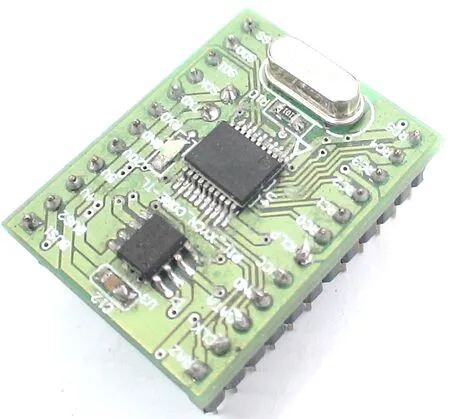
图2 单片机与XY001模块电路板实物图
3.2 ARM主节点硬件设计
主节点通过XY·CN现场总线将各个分节点的数据收集并处理,然后通过以太网将数据发送至上位机。LPC2368是一款基于ARM7TDMI-S结构的微控制器,适用于需要进行串行通信的应用[10-11]。它可在高达72 MHz的工作频率下运行;内部有512 KB的片内Flash程序存储器,具有在系统编程(ISP)和在应用编程(IAP)功能。有一个32 KB大小的静态RAM存储器,可用于代码和/或数据存储。XY100芯片是XY·CN总线主机专用集成电路,完成数字通信的调制解调功能[9]。主节点电路板实物图如图3所示。
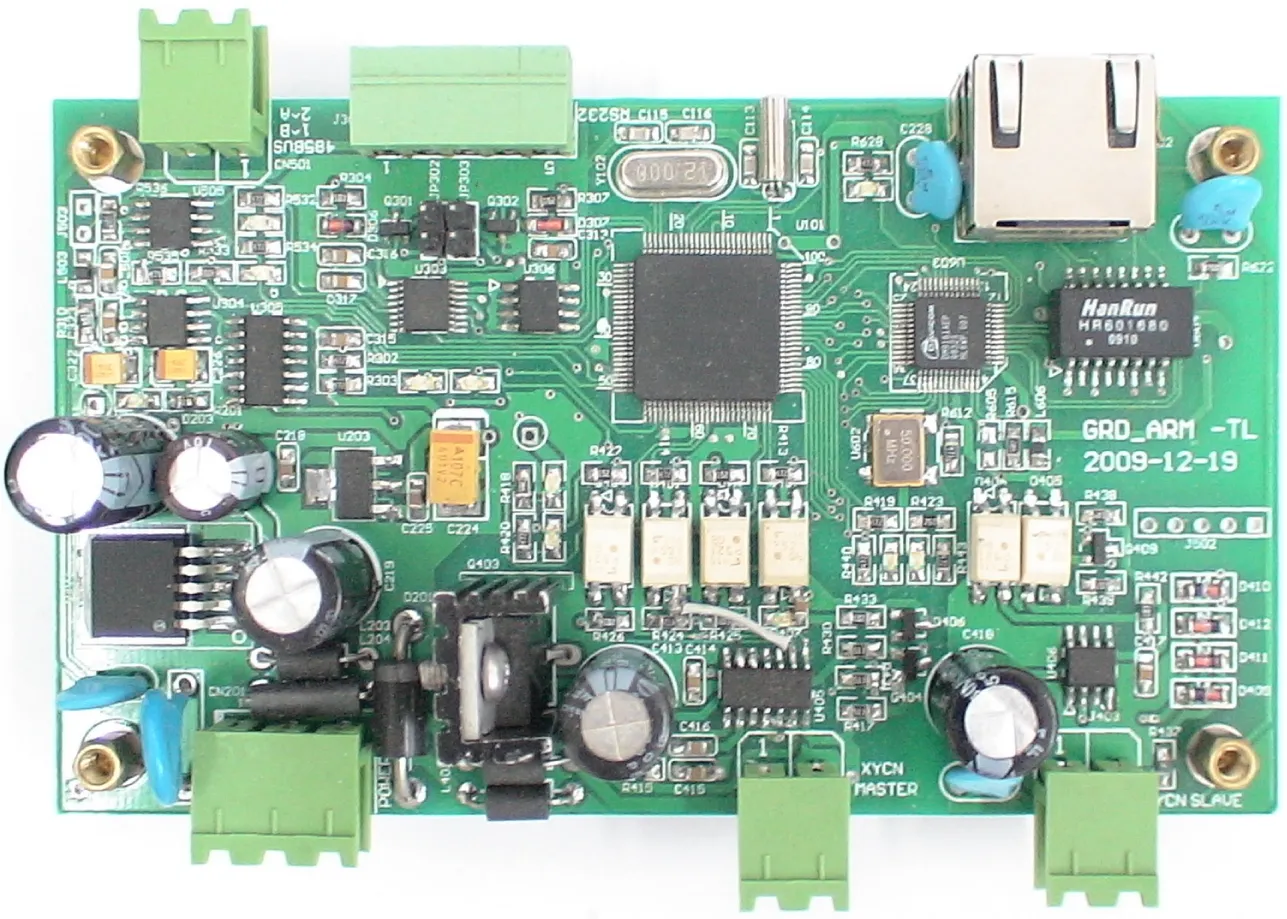
图3 主节点电路板实物图
4 系统软件设计
系统软件设计包括智能分节点软件设计、主节点软件设计和上位机软件设计三部分。
4.1 智能分节点软件设计
智能分节点是一个前后台的系统。后台运行一个主循环,前台有中断进入的时候,执行中断,然后再继续执行后台循环。
4.2 主节点软件设计
主控节点负责收集现场数据,现场总线到以太网的转换,联动控制等诸多功能。为了程序稳定,实时性好,移植嵌入式实时操作系统。本系统在LPC2368上移植μC/OS-II实时操作系统[12-13],程序在ADS1.2的平台上进行系统的移植和任务的编写。
在主节点程序中建立4个任务:
(1) 初始任务。初始化,建立其他3个任务。
(2) 任务2。XY·CN总线通信,不断地发送中断上报命令,遇有中断上传节点,则将串口配置成普通IO口,按照XY·CN通信协议与从机进行通信;当接收到上报数据的ID号后,发送查询数据帧获取该ID号分节点的数据,并将数据存储。
(3) 任务3。联动任务,当XY·CN总线上报数据后,联动任务会检测有无联动对应的设置,若有,则根据设置做相应的设置;
(4) 任务4。TCP通信任务,将分节点中断上报的数据发送到PC机上;根据PC机的命令,实现其它与PC机的通信。
4.3 上位机软件设计
上位机软件采用图形化编程语言LabVIEW[14]在PC机上编写,通过以太网与ARM主节点通信,主要功能是完成远程节点数据的显示、存储、查询和异常报警,联动命令的设置、记录,以及其它人机交互功能。软件设计采用了模块化设计思想,上位机系统框图如图4所示。程序由图上的一些基本功能模块按照一定的层次组成,各功能模块都以主程序界面为初始启动界面,并通过菜单调用。
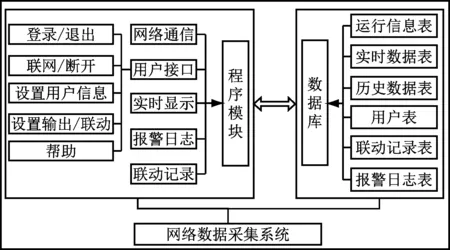
图4 LabVIEW网络数据采集系统框图
主程序界面如图5所示,该界面有四个表格:动态数据显示表格,报警数据显示表格,联动命令记录表格和用户信息与运行状态表格。从主程序界面可以看出,共有5个菜单,“文件”“配置”“联网”“管理用户”“帮助”,每个菜单又有1~2级的子菜单,用LabVIEW的菜单编辑器可以方便地实现[15]。

图5 监控程序主界面
5 结 语
随着网络技术、计算机技术的发展及其在各行各业的应用,使得数据采集和监控技术在内容和形式上都发生了巨大的变化。本文针对某些监控系统的实时性要求高、长距离通信、节点众多、布线复杂、供电麻烦、成本高等问题设计了一个基于XY·CN总线的嵌入式监控系统。该系统采用双绞线通信,并采用总线供电,适合用在实时性高、数据量小、要求总线供电的场合,如:小区安防系统、集中抄表、医院呼叫系统和小型生产线监控等领域。
[1] 陈 新.基于Web的远程监控与数据采集系统[J].电子科技大学学报,2003,32(4):433-436.
[2] 赵彦峰,袁焕宏.基于Web的远程监控与数据采集系统[J].信息通信,2012(4):138-139.
[3] 薛永存,付 华.基于现场总线技术的煤矿监控系统[J].工业计算机控制,2005(10):12,14.
[4] 陈丽华,唐惠玲,陈小川.以太网在电气化铁道监控系统中的应用[J].电气化铁道,2004(4): 9-11.
[5] 汤碧玉,曾 楠,郑灵翔,等.嵌入式系统中基于Web的远程监控设计与实现[J].厦门大学学报(自然科学版),2004,43(5):632-635.
[6] 张晓燕,李力雄,费敏锐.基于Web和现场总线的远程监控系统的设计与实现[J].工业仪表与自动化装置,2007(3): 9-11.
[7] 曦 阳·中国.XY·CN总线供电及通信系统(连载)——系统介绍及专用芯片在该系统中的应用(上)[J].单片机与嵌入式系统应用,2007(12):84-85.
[8] 张 欢,闫学文,杨艺伟.基于XY·CN总线的数据采集系统的设计[J].工业控制计算机,2014,27(2):15-17.
[9] 曦 阳·中国.XY·CN总线供电及通信系统(连载)——系统介绍及专用芯片在该系统中的应用(下)[J].单片机与嵌入式系统应用,2008(1):84-85.
[10] 周爱军,胡宏灿,崔大连.基于LPC2368的CAN总线智能节点设计[J].舰船电子工程,2010, 30(7):124-126.
[11] 霍 凯,陈志鸿,赵潭羿.基于LPC2368的便携式机车供电检测仪的研制[J].中国仪器仪表, 2011(11):54-57.
[12] 彭 辉,蒋 武.基于μC/OS II的嵌入式以太网控制系统的设计[J].控制工程,2011, 18(4):548-551.
[13] JEAN J. LABROSSE著,邵贝贝译.μC/OS II-源码公开的实时嵌入式操作系统[M].北京:中国电力出版社,2001.
[14] 王 波,王 涛,金 英.基于虚拟仪器的气动伺服系统实验平台设计[J].实验技术与管理,2013,30(11):107-110.
[15] 三维书屋工作室,胡仁喜,高海宾.LabVIEW 2010中文版虚拟仪器从入门到精通[M].北京:机械工业出版社,2012.
Design of Embedded Supervising and Control System Based on XY·CN Bus
WANG Bo, ZHANG Yan, TAN Lei
(School of Automation, Beijing Institute of Technology, Beijing 100081, China)
A new embedded supervising and control system based on XY·CN bus is designed to meet the actual demand in high real-time requirement, long distance communication, numerous network nodes and cost saving. The system consists of three parts: PIC MCU sub nodes, ARM master node and PC. PIC MCU sub nodes send the field data to ARM master node and receive the command to control field devices. ARM master node collects the sub node data by XY·CN bus and processes it. Then the processed data are transferred to monitor computer by Ethernet. The monitoring computer is a computer running virtual instrument. It is used to store and display the data of each node. The system uses twisted pair communication and bus power supply. The designed system has the characteristics of good real-time, low cost, flexible expansion and so on.
supervising and control system; XY·CN bus; virtual instrument; embedded systems
2016-11-25
北京理工大学第十批教育教学改革项目(2013-074)
王 波(1976-),男,山东诸城人,博士,实验师,研究方向为检测技术与自动化装置。
Tel.:13671390063;E-mail:wangbo231@bit.edu.cn
TP 277
A
1006-7167(2017)08-0158-03
猜你喜欢
装备制造技术(2020年1期)2020-12-25
测控技术(2018年6期)2018-11-25
测控技术(2018年8期)2018-11-25
铁道通信信号(2018年2期)2018-04-18
电子制作(2017年24期)2017-02-02
电镀与环保(2016年3期)2017-01-20
电源技术(2015年7期)2015-08-22
中国交通信息化(2015年11期)2015-06-06
电子设计工程(2015年8期)2015-02-27
单片机与嵌入式系统应用(2014年9期)2014-03-11