车载BD/DR/MM组合导航定位精度研究
2017-09-03 11:04:42滕志军曲兆强张雷雨郭素阳
东北电力大学学报 2017年4期
滕志军,曲兆强,张雷雨,郭素阳
(东北电力大学 信息工程学院,吉林 吉林 132012)
车载BD/DR/MM组合导航定位精度研究
滕志军,曲兆强,张雷雨,郭素阳
(东北电力大学 信息工程学院,吉林 吉林 132012)
为了弥补非空旷地带北斗定位信号易丢失和航位推算定位误差随时间积累的弊端,提出一种基于道路网拓扑关系的多属性信息融合的地图匹配算法,能准确判定车辆实际所在道路。实验仿真表明,该地图匹配技术更好的修正了BD/DR组合导航的定位结果,匹配精度能达到95%以上,有广泛的应用前景。
组合导航;定位精度;地图匹配;信息融合
北斗导航系统[1](BEIDOU NAVIGATION SATELLITE SYSTEM,简称BDS)是我国2000年初开始建设的重要导航系统,已在亚太地区投入运行。尤其在民用车载导航应用中更为普及,如果单独使用北斗定位,定位精度容易受到多种因素影响,系统鲁棒性较差。当车辆行驶在遮挡物较密集的区域、穿过较长的隧道时,信号接收易中断,导致车辆不能进行正确的导航。
航位推算(Dead Reckoning,简称DR)惯性导航中的核心部分[2-3]。航位推算系统中的传感器能有效的检测出车辆在任一时刻的所处位置和当前点的前进方向[4]。但是该系统在推算时需要车辆的初始位置,而且随着时间的增加,误差会累积变大,最后导致定位结果出现较大偏差,不能进行正确的导航[5-6]。
地图匹配(Map Maching ,简称MM)新兴的一种从算法上来弥补北斗定位和惯性导航误差大的关键技术[7]。该技术主要利用硬件设备获得的组合定位信息,包括车辆的定位位置坐标、行驶方向、定位误差,通过与高精度的电子地图数据相结合,筛选出所要匹配的道路,并按照一定的投影方式进行投影。MM的应用要满足两个先决条件[8-9]:一是所用导航的电子地图道路与实际道路误差小于定位误差;车辆正在某一条道路上行驶。目前常用的电子地图精度已经满足条件一,而且,车辆在需要导航的时候总是行驶在道路上,因此应用地图匹配技术的条件是满足的[10]。
1 BD/DR/MM组合导航定位系统模型
BD/DR/MM组合导航系统是三种技术的综合利用,主要是对定位数据的接收和矫正,如图1所示。首先将DR传感器和北斗模块接收的方向、位置、误差信息经过卡尔曼滤波器进行处理,将过滤后的定位数据输入地图匹配处理流程,通过一定的筛选机制选择出车辆的行驶道路,将筛选的结果与航位推算的结果相结合得出车辆的综合估计位置。

图1 BD/DR/MM组合导航定位系统模型
2 组合导航系统的实现原理
2.1 DR推算原理
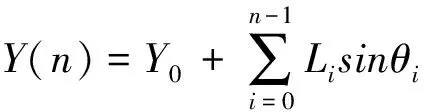
航迹推算是一种逐次推算的方法,其推算原理是通过硬件设备获得的车辆轨迹信息和角度信息对下一点位置和方向进行推算。推算的方程为:

图2 航迹推算原理图


图5 距离匹配度计算
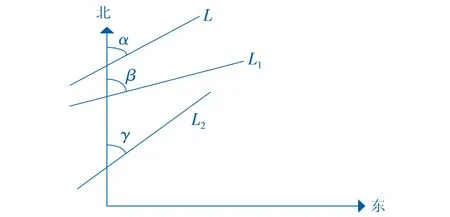
图6 方向匹配度计算

图7 仿真结果
(1)
(2)
其中:(X0,Y0)为车辆的初始位置,由北斗定位装置获得,Li为车辆从Ti-1时刻到Ti时刻行驶的路程,θi为该时间段的航向角,原理如图2所示。
由于航迹推算是一个不断积累的过程,在不断的推算过程中传感器的误差积累越来越大。
3 地图匹配过程实现
地图匹配就是利用车辆定位装置输出的车辆位置坐标、行驶方向与道路网的道路矢量信息相结合,通过一定的规则将车辆强制显示到地图上。地图匹配的实现要经过两个步骤:首先要找出车辆所正在哪条道路行驶,通常情况下,车辆周围存在多条干扰道路,因此此步骤确定的是车辆行驶道路的集合,即车辆行驶道路的候选范围,要确定的候选范围一般通过误差椭圆来确定,这里,为了简化计算通过误差圆来代替。误差圆的半径为下式

(3)

地图匹配的难点在于如何准确快速的检索出车辆正在行驶的道路,本文提出了一种考虑道路网络拓扑结构的多属性信息融合的地图匹配算法,算法具体流程为:
(1) 首先根据道路的拓扑结构和连通性,在候选区域内剔除掉一些不必考虑的候选道路。如图4所示。通过电子地图数据库中可以读出在候选区域内有6条道路,考虑路网拓扑关系以及道路的长度,假设车辆正在道路1上行驶,那么车辆在下一时刻只可能车现在道路1、道路2、道路3、道路4上,避免了对所有道路进行匹配所需的冗余时间。
(2)剔除掉一部分候选路段后从剩下的候选路段中通过距离、方向属性来判断哪一条为车辆实际行驶道路。假设M(x,y)是车辆获得的定位点坐标,Lm候选道路,作定位点到道路的垂直投影,投影点为M0(x0,y0)。d为两点之间的距离,如图5所示。其中,由公式可以看出定位点到候选道路的距离d越小,则该道路是准确道路的可能性越大,在此将距离匹配度设定为。
(3) 单纯的靠一种属性来确定候选道路难以保证匹配的准确度,本文以方向属性与距离属性相融合的方法来保证本算法的稳定性。北斗和DR系统给出的定位信息中含有车辆在某一点的行进方向。假设车辆获得的定位点时的速度正北方向的夹角为α,候选道路L1与正北方向夹角为β,候选道路L2与正北方向夹角为γ,如图6所示。L与L1的方向夹角差θ1=α-β,L与道路L2的方向夹角差θ2=α-γ,由此可见当θ=[θ1,θ2…]越小,该道路是行驶道路的可能性越大,在此将方向匹配度设定为Wθ=cos(θ)。
(4) 因此本文算法的总匹配度
W=A0Wd+A1Wθ,
(4)
其中:A0、A1是距离与方向匹配度的权值,为了匹配算法的时效性在这里我们将A0、A1分别取1和2。
4 算法测试
交叉路口是城市道路网中较常见的道路形式,通过构建交叉路段l1、l2和l3模型,对本文提出的图匹配算法性能验证分析。如图7所示,对本文算法与直接投影算法作模拟比较,由图7可以看出,在交叉路口,两种算法都存在匹配误差,但是融合匹配算法错误匹配相对较少。当出现定位点位置偏离车辆行驶路段时,直接投影算法会出现匹配到错误路段的情况,然而,融合匹配策略会依据车辆历史匹配位置舍弃该定位点,确保车辆匹配正确的行驶路径。
5 结 论
针对地图匹配过程中筛选候选路段存在大量冗余时间,本文提出了一种基于网络拓扑关系的多属性信息融合的地图匹配算法,通过MATLAB模拟仿真和实际行驶匹配结果,证实了本文提出的地图匹配算法能够实时、准确和稳定的匹配出车辆行驶位置,较好的适用于复杂的城市道路网。
[1] Li Yang,Zhang Ke,Li Tan,et al.The Research on real-time map-matching algorithm[C].2012 International Conference on Industrial Control and Electronics Engineering,2012:1973-1976.
[2] 苏海滨,王光政,王继东.基于模糊神经网络的地图匹配算法[J].北京科技大学学报,2012,34(1):43-47.
[3] 刘寅东,张一龙,姜亚平.轮式移动机器人轨迹跟踪控制的参数方法[J].东北电力大学学报,2009,29(2):74-78.
[4] 李清泉,黄练.基于GPS轨迹数据的地图匹配算法[J].测绘学报,2010,39(2):207-211.
[5] 苏奎峰,邓志东,黄振.基于曲率特征的自主车辆地图匹配定位方法[J].机器人,2012,34(4):440-446.
[6] 晏胤,黎福海.GPS/DR组合导航的地图粗匹配算法研究[J].计算机工程与应用,2015,51(1):261-265.
[7] 缪玲娟,章学敏,马小魏.一种改进的嵌入式导航地图匹配算法[J].北京理工大学学报,2012,32(3):268-272.
[8] 曾喆,李清泉,邹海翔等.曲率积分约束的GPS浮动车地图匹配方法[J].测绘学报, 2015,44(10):1167-1176.
[9] 杨杰明,曲朝阳.游戏中斜视角地图的优化[J].东北电力大学学报,2007,27(2):48-50.
[10] 李洋,张晓冬,鲍远律.多权值概率论实时地图匹配[J].电子测量与仪器学报.2012,12(2):166-170.
Research on Vehicle Navigation BD/DR/MM Integrated Navigation Positioning
Teng Zhijun,Qu Zhaoqiang,Zhang Leiyu,Guo Suyang
(School of Information Engineering,Northeast Electric Power University,Jilin Jilin 132012)
In order to,make up for the disadvantage of the Beidou locating signal loss and dead reckoning positioning error with time in the non-open area.This paper presents a map matching algorithm based on road network topological relation and multi-attribute information fusion,which can accurately determine the road where the vehicle is located.The simulation results show that the map matching technique can better fix the positioning result of BD/DR integrated navigation,and the matching precision can reach more than 95%,which has a wide application prospect.
Integrated navigation;Positioning accuracy;Map matching;Information fusion
2017-03-12
滕志军(1973-),男,博士,教授,主要研究方向:无线通信技术.
1005-2992(2017)04-098-04
U125
A
电子邮箱: tengzhijun@163.com(滕志军);753731087@qq.com(曲兆强);635971668@qq.com(张雷雨);460167203@qq.com(郭素阳)
猜你喜欢
电气化铁道(2023年6期)2024-01-08 07:45:48
军事文摘(2023年20期)2023-10-31 08:42:08
小哥白尼(神奇星球)(2022年3期)2022-06-06 07:40:04
计算机应用(2022年2期)2022-03-01 12:33:42
保健医苑(2021年9期)2021-09-08 14:38:06
计算机应用(2021年4期)2021-04-20 14:06:36
计算机应用(2021年1期)2021-01-21 03:22:38
当代陕西(2019年18期)2019-10-17 01:48:50
电气化铁道(2018年4期)2018-09-11 07:01:38
金色少年(奇趣科普)(2017年4期)2017-06-05 15:03:46