
北斗系统中长距离载波相位差分性能的研究
2017-09-03 09:17袁国良骆振永
网络安全与数据管理 2017年15期
袁国良,骆振永,张 坤
(上海海事大学, 上海 201306)
北斗系统中长距离载波相位差分性能的研究
袁国良,骆振永,张 坤
(上海海事大学, 上海 201306)
全球对于北斗定位的研究已经愈来愈深入。文章利用实验仪器接收到的实际数据,对当前星座架构为5颗GEO卫星、5颗IGSO卫星的北斗系统的双频(B1,B2)载波相位差分的定位性能进行了分析,同时将实验结果与GPS载波相位差分的定位机能做了比较。由于外界环境以及基础设施对载波相位差分定位精度的影响,为了进一步优化定位准确率,减小乃至清除误差,采用多频观测测量的方式进行实验。文中对北斗系统、GPS系统及其组合系统在中长距离条件下载波相位差分定位效果进行了分析,从而对北斗系统中长距离载波相位差分的定位性能做出评估。
北斗;GPS;载波相位;组合系统;定位性能
0 引言
航天活动的进展备受各国重视,随着人类社会进入21世纪,世界各国的航天活动进入一个新平台。在国家发展的总体战略中,航天产业已成为越来越重要的角色,对人们的生活也有越来越重要的影响。具有自主知识产权的卫星导航系统的重要性不言而喻,它投入了大量的人力物力资源。目前全球成熟的卫星导航系统包括美国的全球定位系统(GPS)以及俄罗斯格洛纳斯导航系统(GLONASS)和中国正在实施的北斗卫星导航系统[1]。
2013年,施闯等人分析了北斗系统相对定位性能[2],得到了较高的精度。同年,王茜进行了基于载波相位差分的GPS/DR组合定位算法的研究,得出了相位差分中整周模糊度的固定解的解算是定位的关键,可采用LAMBDA算法解决[3]。
1 载波相位差分
用载波相位进行测量时,可以得到如下的载波相位观测方程式:
Φ=λ-1(r+c(δtu-δts)-I+T)+N+εφ
(1)
其中,Φ为载波相位测量值,λ为载波的波长,r为卫星与接收机之间的几何距离,c为光速,δtu与δts分别表示接收机时钟钟差和卫星时钟钟差,I表示电离层延迟,T表示对流层延迟,N表示观测噪声的整周模糊度,εΦ为观测噪声。
对于短基线,假设已经消除电离层和对流层的影响,那么双差观测方程如下:
(2)
(3)

(4)
(5)

2 实验和数据分析
2.1 长距离情况下
《西行漫记》正是在这一时代背景下完成的,它是一部文笔优美的纪实性很强的报道性作品。1936年6月至10月期间,作者埃德加·斯诺在以延安为中心的陕甘宁边区进行实地采访,真实记录了我国西北革命根据地的所见所闻。
在一些特殊情况下,比如长基线、露天矿山或城市峡谷中,载波相位差分的可用性和有效性都会急剧下降[8]。本次实验是在长基线情况下进行的,实验距离约为50km。
为了使接收机能够实现定时定位,在计算该位置时所涉及的方程数目必须大于未知数的个数。因此,接收机要收到不低于四颗可见卫星的信号,这是定位、定时的本质要求。可见卫星有效数量与定位效果密切相关。图1描述了Beidou系统、GPS系统和综合系统模式的可见卫星的数目,可以看出在0~4时和18~24时,北斗卫星的数量高于GPS卫星数量,其他时间北斗卫星数目少于GPS系统。两者的组合系统大大地提高了卫星数目,保证了定位的有效性。
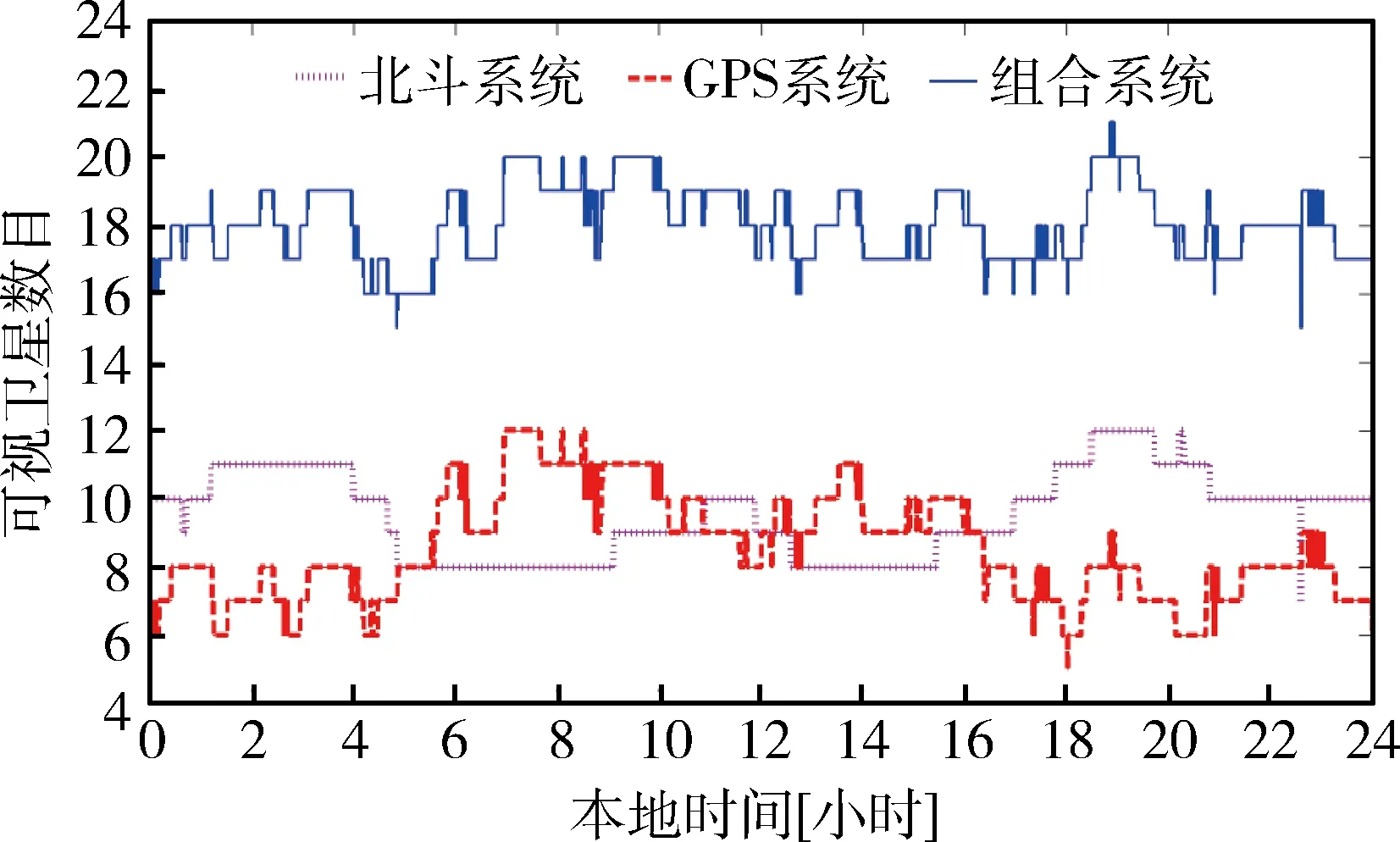
图1 北斗、GPS和组合系统的可视卫星数目
空间位置精度因子(PDOP)反映了定位的准确性,是卫星的分布情况的反映。较低的PDOP值意味着更好的卫星分布。定位方程组经线性化后可得到如下的矩阵方程式:
(6)
其中,G是卫星的几何矩阵;ερ代表测量误差向量,εx、εy、εz和εδt则代表由误差向量ερ在每个方向和时间的误差矢量所造成的定位误差;Δx、Δy、Δz和Δδt为用户位移的矢量和接收机的时钟差;b为实际值与估计值之间的偏差。上式可由最小二乘法求解[9]。进而可以得到定位误差与测量误差的关系:
(7)
其中,矩阵H的定义为:
H=(GTG)-1
(8)
H称为权系数阵,它是一个4×4的矩阵。根据式(4)可知,经权系数阵H放大后,可将测量误差的方差转化为定位误差的方差。所以,测量误差的方差与定位误差的方差呈正相关。因此,当权系数阵H中的元素值越小时,测量误差也就越不会被放大成定位误差[10]。
σρ=PDOP·σURE
(9)
式中,σρ为定位误差;σURE为测量误差,在相同的测量误差条件下,PDOP的值越小,则定位精度也就越高。
图2为北斗系统、GPS系统与组合系统的空间精度因子的对比情况,从图中可以看出大约在0~4时和18~24时,GPS系统的PDOP值是高于北斗系统的。这与三个系统的可视卫星数目对比情况相对应,可视卫星数目较少导致定位效果不佳,所以PDOP就相对较高。在其他时刻,GPS系统的PDOP值都低于北斗系统,是因为在这期间GPS系统的可视卫星数目多于北斗系统。可以从图中明显看出,组合系统的PDOP值远低于GPS和北斗系统,基本在1.5以下。这是因为组合系统的可视卫星数目增加,使卫星的几何分布状况较好,从而使定位的性能大大改善。
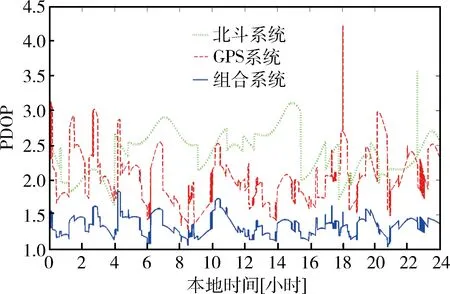
图2 北斗、GPS和组合系统位置精度因子的对比
由表1,各方向的均方根值较小,说明结果较为稳定。从表1中可以得出,北斗系统有固定解的概率(FIX率)略高于GPS系统。尽管如此,在有固定解的情况下GPS系统的向东、向上方向上的均方根值(RMS)略低于北斗系统。结果表明,GPS系统的定位结果比北斗系统更稳定。而在此次实验中组合系统无固定解,可以看出其东向RMS值与GPS/北斗系统在固定解的情况下相近。说明组合系统的定位结果在一定程度上是优于GPS/北斗系统的,而组合系统的北向和东向的RMS值也是基本小于GPS/北斗系统总体的RMS值。所以总体来说,组合系统的定位具有一定的优势。
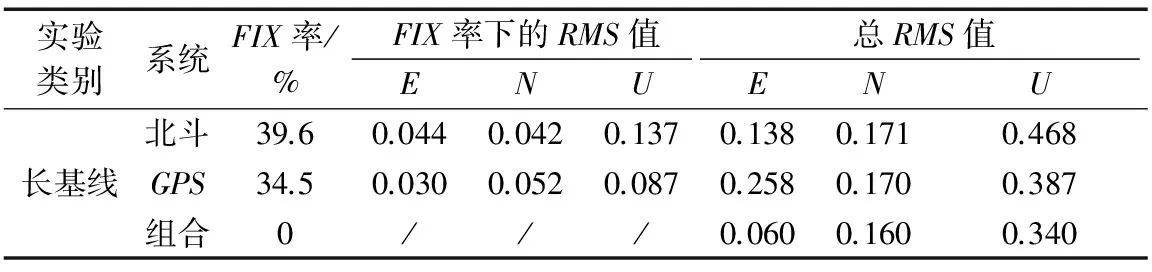
表1 长基线情况下北斗、GPS和组合系统FIX率及RMS值
2.2 短基线情况下
本次实验选取20~24时连续时间的数据来进行分析,可视卫星数目如图3所示。

图3 北斗、GPS和组合系统的可视卫星数目
从图3中可以看出,在20~21.5时北斗卫星的可视数目是高于GPS系统的,在其他时刻GPS系统的卫星数目等于或高于北斗卫星系统。因此在20~21.5时,北斗系统有着比GPS卫星系统更好的空间卫星集合分布,定位性能可能优于GPS系统。在长基线情况下,从图1可以看到在20~24时,组合卫星的可视数目约为18颗,而在短基线情况下组合卫星的可视数目比长基线情况下约少两颗,卫星数量的减少也会影响定位性能。
图4显示了短基线实验三个系统的PDOP值的对比结果。从图中可以看出,GPS系统的PDOP值基本小于北斗系统,说明在此时间段,GPS的定位性能优于北斗卫星系统。是否GPS的定位性能优于北斗系统,还需进一步的验证。同样的,组合系统的PDOP值最低,定位性能最好;与长基线同时段PDOP值类似,约为1.5。
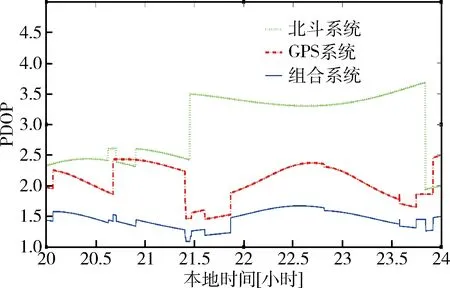
图4 北斗、GPS和组合系统位置精度因子的对比
实验结果如表2所示。从表2可以看出,在短基线情况下,接收机和卫星的相关误差(时钟误差、硬件延迟等)可以消除。在GPS系统中几乎都得到了固定解,东、北、上3个方向上的RMS值显著低于北斗系统和组合系统。说明GPS系统在短基线的情况下定位性能更加稳定。

表2 短基线情况下北斗、GPS和组合系统FIX率及RMS值
3 结论
本文分别从长基线、短基线两个实验验证了北斗二代系统进行载波差分定位的可行性。在长基线实验中可以看出,在模糊度固定率相近的情况下,北斗系统的差分定位水平和GPS处在同一层面上。而组合系统的定位性能比GPS/北斗总体的定位性能要好,其RMS值低于GPS/北斗系统。在短基线实验中,GPS更容易得到固定解,其定位性能最佳;从实验结果来看北斗系统在东、上方向上定位性能优于组合系统,组合系统的北向定位性能优于北斗系统。但是由于是短基线情况下,由于电离层、对流层的影响可忽略,定位结果理论上应该比长基线更好。
需要在此指出的是,北斗卫星星座还未完全建成,对载波差分定位的分析还需要以后陆续进行。但是可以预见的是,随着北斗卫星星座体系的逐渐完善,北斗卫星的特点也会更好地体现。本文上述的结果,是在短时间内得出的,特别是短基线的实验,所以只是在一定程度上对北斗卫星载波差分定位性能有了评估,对定位性能的分析也有局限性。以后的工作是要选取更长时间的数据,对北斗卫星载波差分定位的性能做更加全面的分析。
[1] 康向阳. 中国的GPS-北斗导航系统[J]. 天津航海, 2007(1):61-63.
[2] SHI C,ZHAO Q,HU Z,et al.Precise relative positioning using real tracking date from COMPASS GEO and IGSO satellites[J]. GPS solutions,2013,17(1):103-119.
[3] TEUNISSEN P J G. Theory of carrier phase ambiguity resolution[J]. Wuhan University Journal of Natural Sciences, 2003, 8(2):471-484.
[4] LI J, YANG Y, XU J, et al. Performance analysis of single-epoch dual-frequency RTK by Beidou navigation satellite system[C]. Proceedings of China Satellite Navigation Conference (CSNC), 2013: 133-143.
[5] FORSSELL B, MARTINNEIRA M, HARRISZ R A. Carrier phase ambiguity resolution in GNSS-2[J]. Proceedings of Ion Gps, 1997:1727-1736.
[6] VOLLATH U, BIRNBACH S, LANDAU L, et al. Analysis of three-carrier ambiguity resolution technique for precise relative positioning in GNSS-2[J]. Navigation, 1999, 46(1):13-23.
[7] GUO H, HE H, WANG A, et al. Performance of triple-frequency high-precision RTK positioning with compass[J]. Lecture Notes in Electrical Engineering, 2012, 161:371-378.
[8] GAO W, GAO C, PAN S, et al. Reliable RTK positioning method based on partial wide-lane ambiguity resolution from GPS/GLONASS/BDS combination[C]. China Satellite Navigation Conference(CSNC) 2015 Proceedings: Volume II. Springer Berlin Heidelberg, 2015:449-460.
[9] 刘永明,张云,袁国良.GPS/北斗-2组合定位性能的研究[J].电子设计工程,2013,21(14): 121-123.
[10] 谢钢. GPS原理与接收机设计[M].北京:电子工业出版社,2009.
The performance of carrier phase difference based on the Beidou system with middle-long distance
Yuan Guoliang, Luo Zhenyong, Zhang Kun
(Shanghai Maritime University, Shanghai 201306, China)
The global research on Beidou positioning has become more and more thorough.We use the actual receiving data to analyze the positioning performance of dual frequency (B1, B2) carrier phase difference in Beidou system whose constellation structure is 5 GEO satellites, 5 IGSO satellites. The positioning performance is compared with that of global positioning navigation system (GPS) carrier phase difference.Because the carrier phase differential positioning accuracy is limited by geometric factors, ionosphere and troposphere, the combination of multi frequency observation can reduce or even eliminate these errors, and further improve the differential positioning accuracy.In this paper, the carrier phase difference positioning effect of the Beidou system, GPS system and assembly system in the medium and long distance condition is analyzed, thus the Beidou system in medium and long distance carrier phase positioning performance is evaluated.
Beidou; GPS; carrier phase; combined system; positioning performance
TN927
A
10.19358/j.issn.1674- 7720.2017.15.020
袁国良,骆振永,张坤.北斗系统中长距离载波相位差分性能的研究[J].微型机与应用,2017,36(15):69-72.
2017-02-05)
袁国良(1963-),男,硕士,副教授,主要研究方向:光电通信技术。
骆振永(1992-),男,硕士研究生,主要研究方向:无线卫星通信与室内定位。
张坤(1991-),男,硕士研究生,主要研究方向:无线卫星通信。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
小猕猴智力画刊(2021年6期)2021-08-05
科学(2020年5期)2020-11-26
中国惯性技术学报(2019年3期)2019-10-15
雷达学报(2018年5期)2018-12-05
舰船电子对抗(2016年5期)2016-12-13
现代工业经济和信息化(2016年8期)2016-05-17
中国民族医药杂志(2016年5期)2016-05-09
作文大王·低年级(2016年3期)2016-03-11
西部广播电视(2015年10期)2016-01-18
