基于AQWA的FPSO串靠提油作业中的拖轮适用性评估
2017-09-03 05:24,,,,,,,
中国海洋平台 2017年4期
, , , , ,, ,
(1.大连理工大学船舶工程学院, 辽宁 大连 116024; 2.烟台打捞局, 山东 烟台 264012; 3.中海油能源发展股份有限公司, 天津 300457)
基于AQWA的FPSO串靠提油作业中的拖轮适用性评估
张明霞1,裴斐1,刘镇方1,汪仕靖1,林焰1,纪卓尚1,范守梅2,苗宗叶3
(1.大连理工大学船舶工程学院,辽宁大连116024; 2.烟台打捞局,山东烟台264012; 3.中海油能源发展股份有限公司,天津300457)
FPSO原油串靠外输的过程中,提油轮与FPSO相对位置的保持是其安全作业的首要条件,一般由提油轮尾部的拖轮协助完成定位,因此拖轮拖力的大小成为提油安全作业的基础。目前,拖轮选配仅凭经验,缺乏理论依据。因此,通过对风、浪、流等环境载荷作用的数值计算,求出所需配备拖轮的拖力大小。建立系统力学平衡方程,对提油轮和FPSO进行几何建模,利用AQWA求出波浪力,根据经验公式计算风力和流力,最后得到允许作业环境条件下所需拖轮拖力的分布曲线。计算结果一方面可为拖轮能否安全作业提供评估依据,另一方面可为安全作业选配拖轮提供理论依据。
FPSO;串靠外输;提油轮;拖轮;AQWA
0 引 言
将储存于FPSO中的原油输送至穿梭油轮的作业称为提油作业。国内现行提油作业的靠泊方式可分为两种[1]:一种是FPSO和穿梭油轮平靠在一起进行提油外输作业(简称平靠);另一种是FPSO与穿梭油轮首尾连接的提油作业方式(简称尾靠或串靠),国内FPSO大部分采用此类方式进行作业。为了保证串靠外输作业的安全,FPSO与提油轮在提油作业过程中需始终保持在一条直线上。该提油系统受到风、浪、流等环境载荷的作用,其中FPSO在环境载荷作用下会绕着单点系泊旋转,被缆绳拖在其尾部的提油轮需要跟着FPSO同时转动,以保持二者的相对位置[2-3]。
由于FPSO与提油轮的尺度不同,所受环境载荷大小也不同,在相同的环境条件下,会出现运动不一致的情形,因此作业过程中需要一艘拖轮在提油轮尾部辅助拖带,以保证提油轮与FPSO艏向一致。由于FPSO和穿梭油轮都属于巨型油轮,穿梭油轮与拖轮的配合默契度是作业过程中风险最高的环节,并贯穿于整个作业过程中。拖轮影响着整个作业过程的安全性、经济性与环保性[4-6]。随着环境参数的变化,所需拖轮的拖力大小也随之变化。常规做法是根据FPSO提油作业指南[7]进行配备,但指南要求为一般经验数值,缺乏理论依据,因此一般拖轮拖力配备有富余,这对整个系统的作业经济性是不利的。建立FPSO提油作业系统平衡方程,通过系统几何建模及环境载荷数值计算,求出提油轮在不同角度环境载荷作用下所需拖力的变化曲线,为拖轮安全作业性能评估提供理论依据。
1 系统模型与作业环境参数
1.1系统模型
在提油作业过程中,FPSO在环境载荷的作用下绕系泊点旋转,要求提油轮也随着FPSO一同旋转,二者中心线需要始终保持在一条直线上并保持一定的距离。实际上,由于风、浪、流作用,FPSO与提油轮的运动并不一致,二者中心线之间会出现夹角,如果夹角过大,会导致作业风险升高。该夹角一般不超过15°[7],如果超出该角度,根据角度大小进行不同等级的报警,直至系泊缆破断[5]。在提油轮尾部的拖轮作用就是给提油轮一定的拖力,保证其与FPSO艏向保持一致。系统处于任意位置的示意图如图1所示。
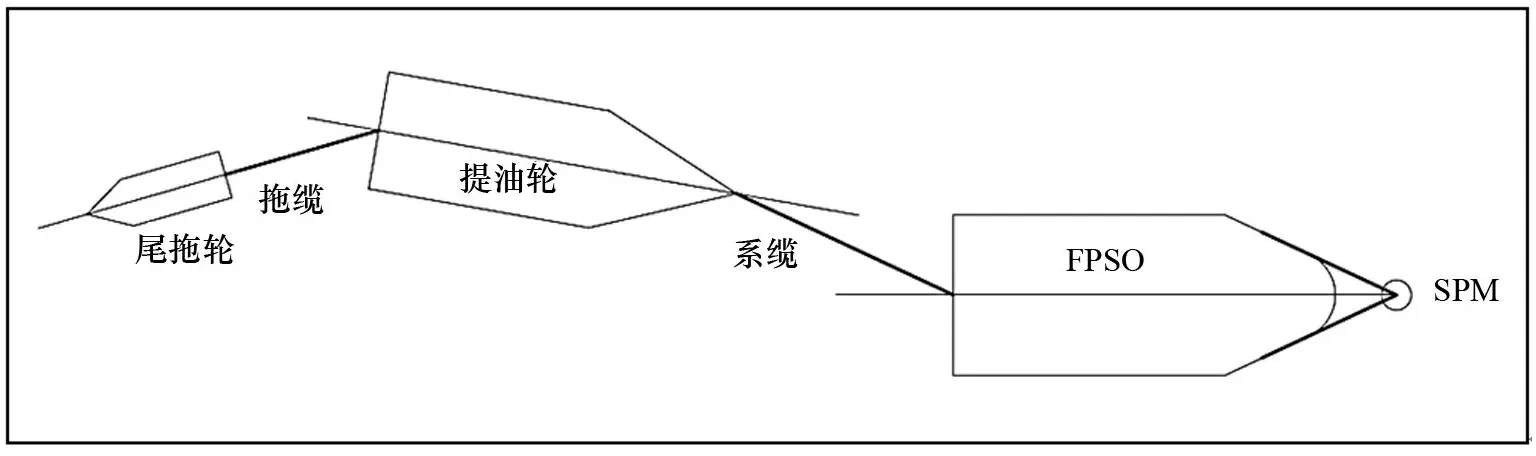
图1 FPSO提油作业过程某一时刻示意图
1.2提油轮主尺度参数和海区环境参数
某提油轮的主尺度参数、作业海区参数分别见表1和表2。
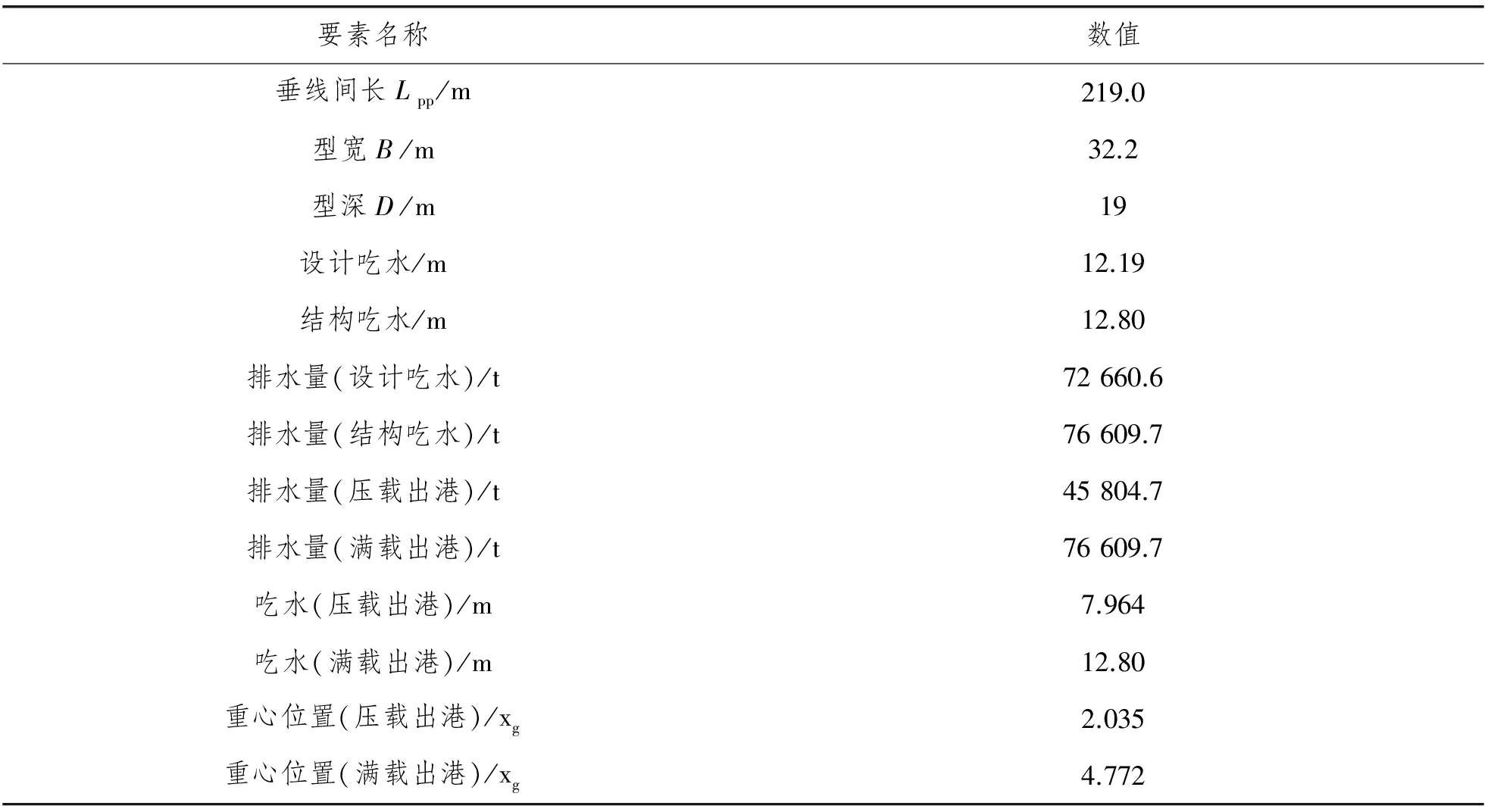
表1 某提油轮参数
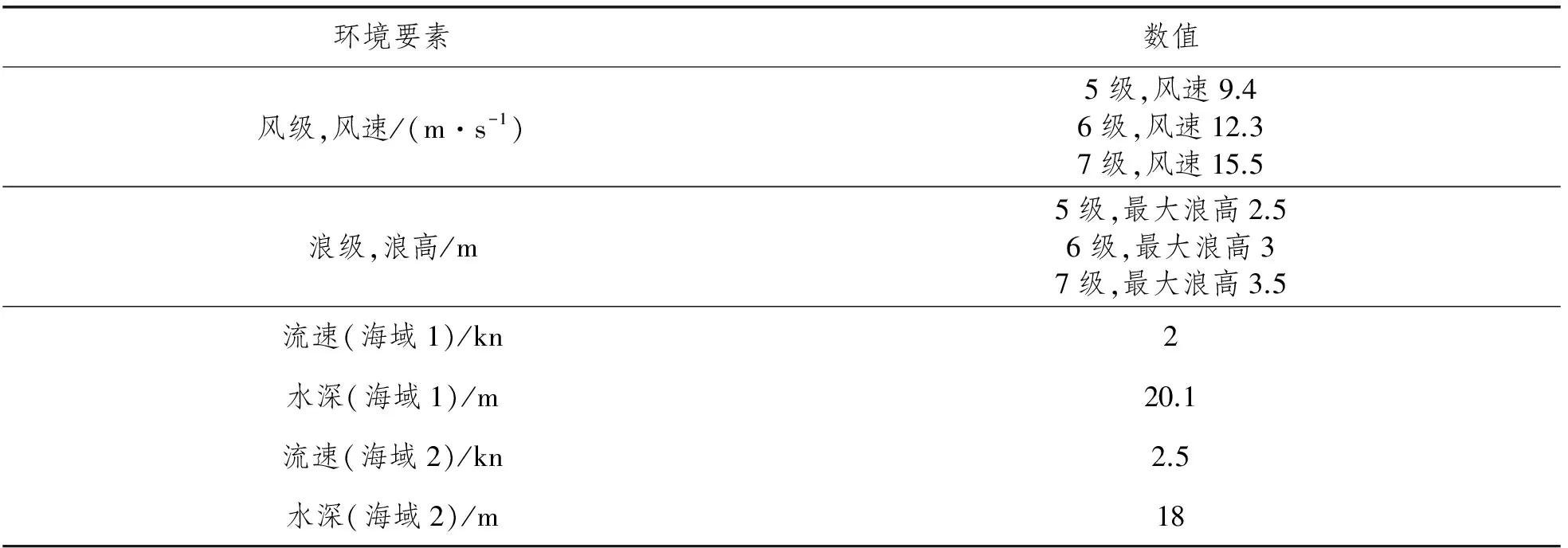
表2 某海区环境参数
1.3计算工况的设定
根据对提油作业过程的分析,FPSO,提油轮和尾拖轮组成的系统在风、浪、流作用下,会出现运动姿态不一致的情况,从而导致二者相位差。可能出现的状态有:
(1) 海流速度不大,风浪也不大,系统朝向主要由尾拖轮控制,容易保持直线状态,尾拖轮不需要施加很大拖力。
(2) 海流速度较大,风浪也较大,系统朝向为海流与风浪联合作用方向,当提油轮偏离FPSO轴线,尾拖轮需要将其拖回来时,或者海流力或者风浪力,会有其中一种力对尾拖轮起到帮助作用,使得所需尾拖轮拖力有所减小,因此在该状态下尾拖轮所需拖力不是最大的。
(3) 海流速度较大,风浪较小,系统朝向主要由流向控制,容易保持直线状态,尾拖轮不需要施加很大拖力。
(4) 海流速度较小,风浪较大,系统朝向主要由风浪方向控制,容易保持直线状态,尾拖轮不需要施加很大拖力。
(5) 海流速度较小,风浪方向不稳定,有横向较大的突加风,提油轮与FPSO偏离直线状态时,尾拖轮需在提油轮尾部斜向加力拖曳,以保持提油轮与FPSO的直线状态,这种状态需要尾拖轮给出较大拖力。
综上所述,设定最危险工况为:海流速度为零,风级为该海区允许提油作业的最大风级(7级),浪为该风级长期作用下的成熟波浪(最大浪高3.5 m),风浪方向一致,并且以较大角度横向作用于FPSO及提油轮。
1.4系统力学模型
计算中忽略流力影响,考虑提油系统中各船只分别受风力和波浪力的作用,此时为了保证提油轮处于平衡状态,尾部拖轮应该对提油轮施加一定拖力,力学模型如图2所示。提油轮共受4个外力,分别为T拖,T油,F浪和F风。要实现对提油轮的拖曳或定位,需保证其受力平衡,在此定义风向角和浪向角同为θ。
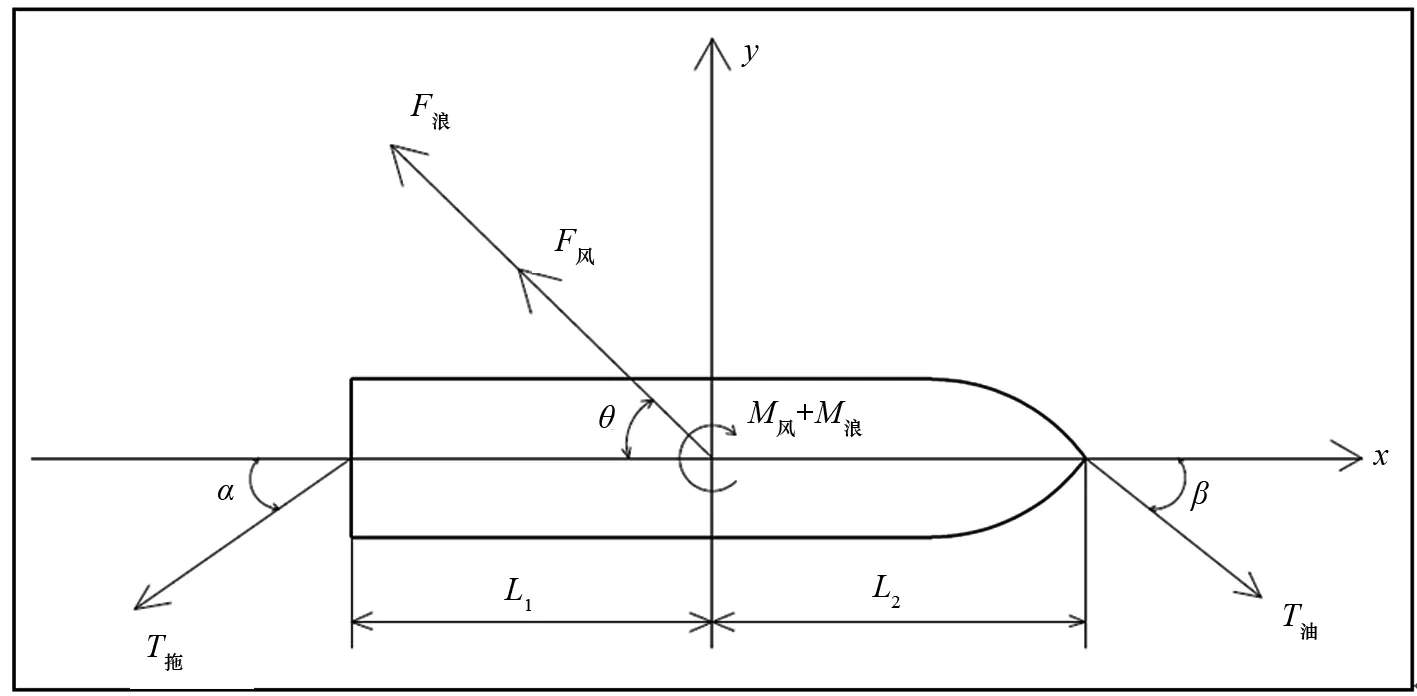
图2 提油轮受力平衡示意图
提油轮对纵向x轴和横向y轴的合力应等于零,提油轮绕重心旋转的合力矩也应等于零,即
式(1)和式(2)为力、力矩平衡方程,转矩M顺时针为正。为了保持提油轮和FPSO之间的缆索张紧,要求T拖cosα大于20 t(196.2 kN)。在给定的环境条件下,F浪和F风可以求出,那么已知风向角及浪向角θ,在拖轮与提油轮中心线夹角α一定的情况下,可求未知变量T油,T拖和β。本文对拖轮拖力进行评估,所以仅求出不同角度下的T拖。
2 提油轮所受环境载荷计算
2.1风力计算
风载荷计算使用中国船级社的规范《系泊设备指南》中的方法,见式(3)~式(5)。
纵向风压力:
横向风压力:
转矩:
式中:Cx为纵向风力阻尼系数;Cy为横向风力阻尼系数;Cz为艏摇转矩系数;d为空气密度,1.29 kg/m3;V为设计风速,m/s;Ax为船体水面以上纵向受风面积,m2;Ay为船体水面以上横向受风面积,m2。
满载状态下:吃水12.80 m;纵向Ax=544.8 m2;横向Ay=2 239 m2。压载状态下:吃水7.965 m;纵向Ax=629 m2;横向Ay=2 808.4 m2。Cx,Cy,Cz的取值见表3。
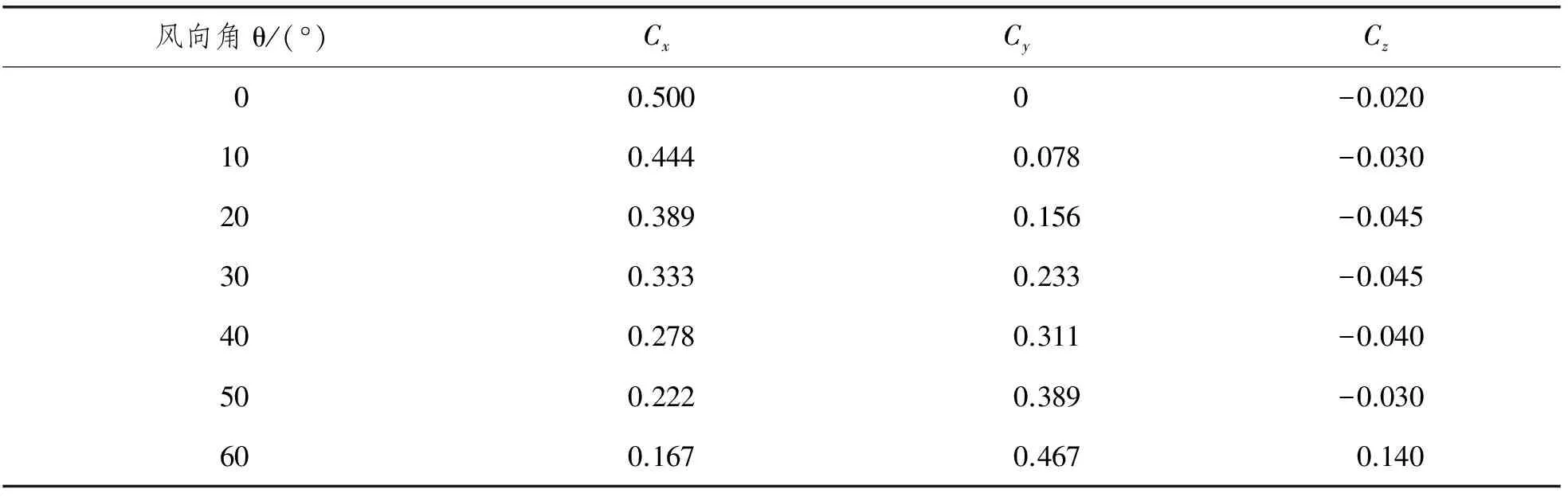
表3 风力阻尼系数和转矩系数
根据式(3)~式(5),计算提油轮在满载和压载状态下的风力结果见表4。

表4 7级风作用下提油轮所受风力
2.2波浪力计算
波浪计算使用AQWA-Workbench进行计算,计算步骤为
(1) 建立提油轮的几何模型。
(2) 对几何模型进行网格划分,如图3所示。
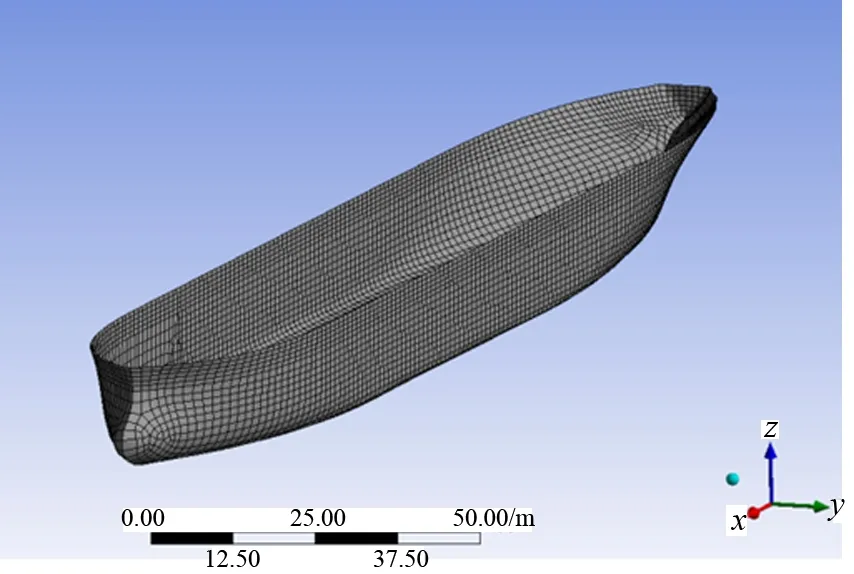
图3 提油轮网格划分
(3) 频域计算。输入计算所得曳力系数,波浪角度和波浪方向0°,10°,20°,30°,40°,50°,60°(如图4所示),在网格上计算绕射力和辐射力,将结果传递给时域计算模块。
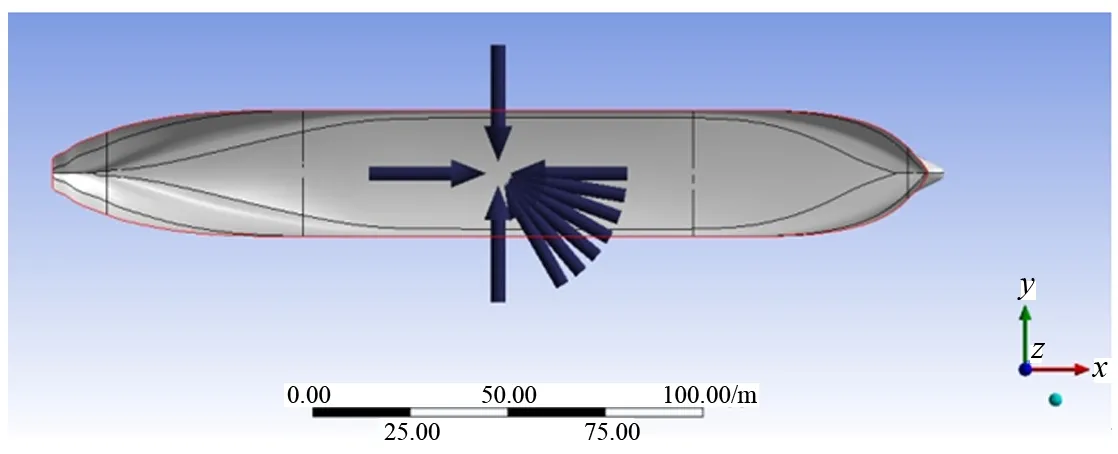
图4 提油轮波浪力计算输入波浪角
图5~图11为最大波高3.5 m的频域分析结果,图示模拟了不同角度入射波浪的情况。

图5 H=3.5 m, θ=0°频域计算结果 图6 H=3.5 m, θ=10°频域计算结果
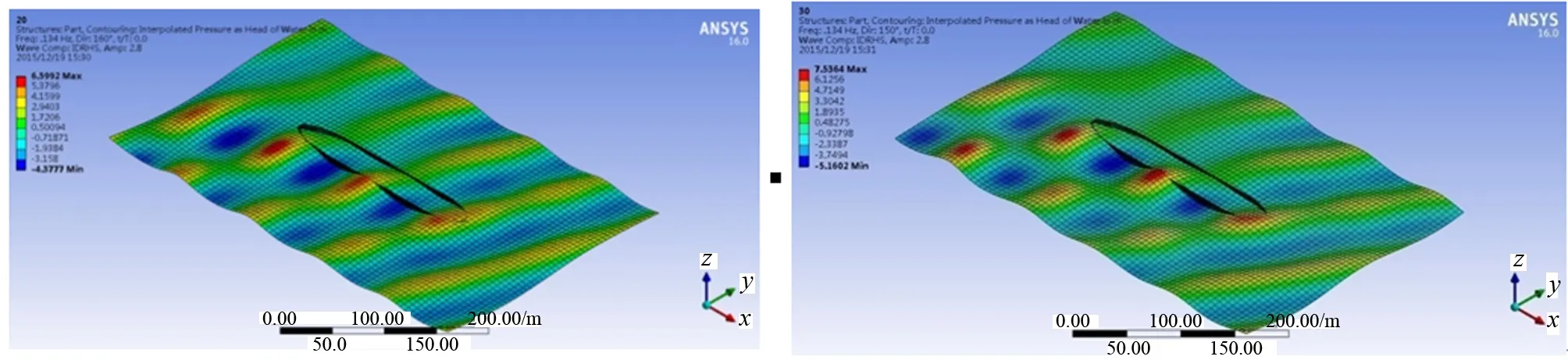
图7 H=3.5 m, θ=20°频域计算结果 图8 H=3.5 m, θ=30°频域计算结果
图9 H=3.5 m, θ=40°频域计算结果 图10 H=3.5 m, θ=50°频域计算结果
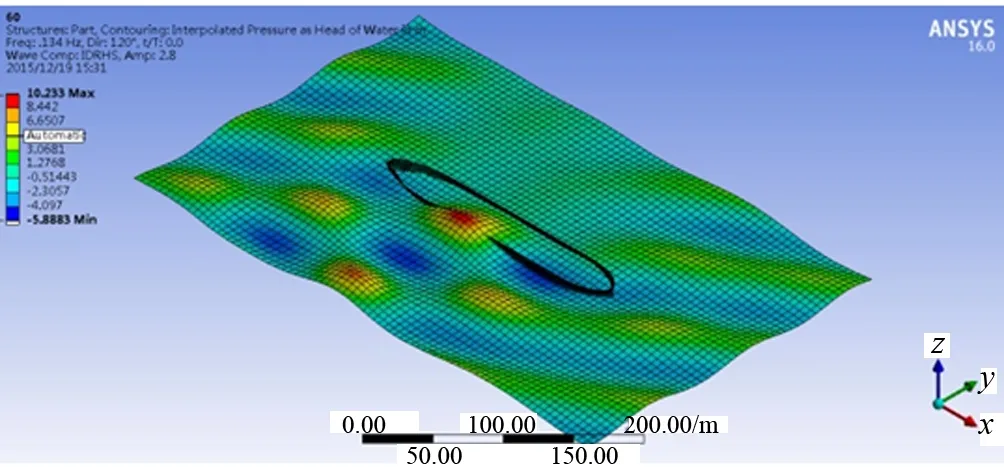
图11 H=3.5 m, θ=60°频域计算结果
(4) 时域计算输入波浪载荷:JONSWAP谱。最大波高:3.5 m。对应有义波高:2.8 m。对应极限频率:0.145 Hz。谱峰影响因子Gamma: 3.3(JONSWAP谱中Gamma用来描述风浪的成长状态,其平均值为3.3)。在时域内计算出3 000 s内的漂移力,对时域数据进行统计分析,得出结果见表5。
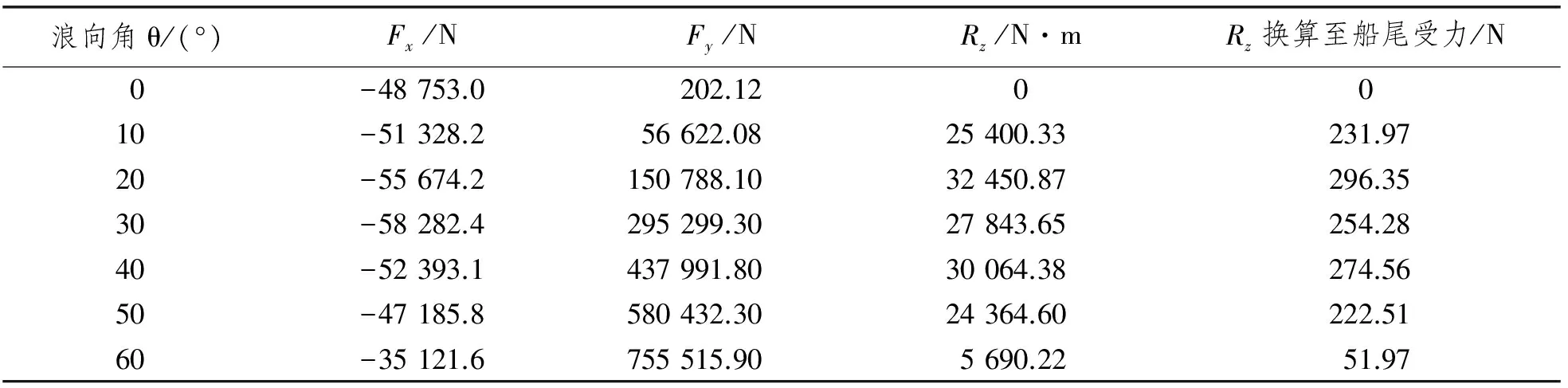
表5 波高H=3.5 m时提油轮所受波浪载荷
2.3环境载荷合力
提油轮所受风载荷和浪载荷的合力见表6,其中:Fx=Fx1+Fx2;Fy=Fy1+Fy尾1+Fy2+Fy尾2。
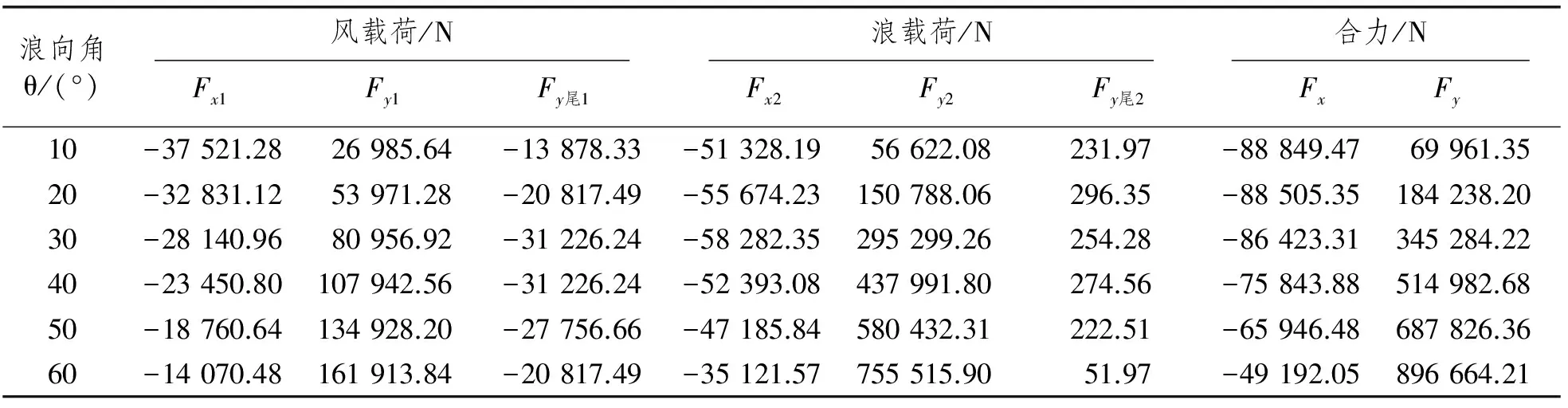
表6 H=3.5 m 满载工况风载浪载合成
3 所需拖力计算
3.1提油轮所需拖力计算
通过求解式(1)和式(2)得出在各个风浪方向下的拖力可行范围,见表7(表7中F拖为所需拖力大小,α为拖力与提油轮中纵剖面的夹角)。

表7 提油轮满载在各个风浪向下拖力可行区域
将表7数据绘制成曲线,如图12所示。

图12 H=3.5 m满载工况各个风浪向下所需拖力可行区域
在特定风浪角下,图12中曲线上方的区域即为拖轮拖力和拖力夹角的可行区域。只要在曲线上方,任何组合都可以完成拖曳目标,即保持提油轮的当前位置。
如果考虑在提油轮船长方向上保持最小20 t的拖力,保证FPSO和提油轮之间的缆绳张紧,可在提油轮工作的可行域边界增添一条“纵向20 t拖力”的边界线,这条边界线的上方为可行区域。考虑纵向20 t最小拖力时,可行域为角度曲线和“纵向20 t”曲线这两条曲线上方的交集。
总共计算了2个作业海区中,3个波高(3.5 m,3.0 m和2.5 m,极限允许作业波高3.5 m)条件下,提油轮受到的波浪载荷与风载荷以及所需拖力。表8为两个海区中3个波高下提油作业所需最大拖力。

表8 2个作业海域中不同波高载况下所需最大拖力
由表8可以看出,提油作业所需拖力在同一个海区及同一个波高条件下,满载所需拖力小于压载所需拖力。海区不变,载况不变,所需拖力随着波高增大而增大。波高不变,载况不变,所需拖力随海域水深减小而增大。不同因素对所需拖力影响见表9。

表9 不同因素对所需拖力的影响 %
4 结 论
通过对风、浪、流等环境载荷的数值计算,得到在不同环境参数(2个海域,水深不同,3个浪高)下、提油轮在满载和空载2种载况下,安全作业所需拖力的变化范围分布曲线,为提油安全作业选择合适拖力的拖轮提供了理论依据,避免了由于盲目选择大功率拖轮而造成的拖力冗余,既保证安全作业,又有利于改善作业经济性。
该文计算采用了静态模型,认为流的影响对于提油轮与FPSO保持艏向一致是有利因素,因此所需拖力计算未考虑流力影响。所得结果偏保守,不会降低作业安全性。
[1] 孙永生.FPSO提油作业时穿梭油轮的安全操作[J].航海技术,2010(6):23-24.
[2] 中国海洋石油有限公司. 海洋石油外输作业拖轮与提油轮协同作业程序指南[M].2012.
[3] 刘元丹,刘敬喜,谭安全.系泊FPSO风浪流载荷下运动及其系泊力研究[J].船海工程,2011,40(6):146-149.
[4] 孙海,孙丽萍,樊红元.FPSO串靠外输的断缆可靠性与风险分析[J].哈尔滨工程大学学报,2011,32(1):11-15,48.
[5] 朱进全,郑晓涛,董海杰.AIS在FPSO原油外输作业中的设计应用[J].船海工程,2015,44(5):113-116.
[6] MATTER G B,SALES J, JOEL S,et al.Dynamic stability of FPSO-shuttle systems:an analatical peocedure and practical results[C].Proceeding of the 21st Int. Conf. on Offshore Mechanics and Arctic Engineering,2002.
[7] 王艳杰.渤海海域FPSO过驳作业安全保障技术研究[D].武汉:武汉理工大学,2011.
SuitabilityAssessmentofTugforOffloadinginTandemBetweenFPSOandShuttleTankerBasedonAQWA
ZHANG Mingxia1, PEI Fei1, LIU Zhenfang1, WANG Shijing1, LIN Yan1, JI Zhuoshang1, FAN Shoumei2,MIAO Zongye3
(1.Ship Engineering College, Dalian University of Technology, Dalian 116024, Liaoning, China;2. Yantai Salvage Bureau, Yantai 264012, Shandong, China;3. CNOOC Energy Technology & Services Limited Tianjin Branch, Tianjin 300457,China)
In order to ensure the safety during the offloading in tandem between FPSO and shuttle tanker, a tug is needed to be located at the stern of the shuttle tanker to help pull to keep suitable distance and deviation of angle with FPSO all the time. Tug is indispensable for such offloading operation. It is chosen empirically and lack of theoretical calculation and assessment. Based on the established mathematical equilibrium model, the required pull force for the tug is presented according to the different angle of rotation. The geometrical model of shuttle tanker and FPSO based on CATIA are constructed and wave force is calculated by AQWA-Workbench tools respectively under the given extreme operation conditions and parameters. Some advice is given for tug choice. The results are practical for FPSO offloading management to avoid unnecessary bigger bollard pull force for tug and at the same time ensure safety for offloading operation.
FPSO; offloading in tandem;shuttle tanker; tug; AQWA
2016-04-21
张明霞(1969-),女,副教授
1001-4500(2017)04-0034-09
TE88
: A
猜你喜欢
水上消防(2022年1期)2022-06-16
中国船检(2021年8期)2021-11-21
天津科技(2021年5期)2021-06-04
中国海上油气(2020年5期)2020-10-20
科学导报·学术(2020年19期)2020-07-09
珠江水运(2019年9期)2019-06-02
儿童故事画报·发现号趣味百科(2019年9期)2019-02-02
舰船科学技术(2015年8期)2015-02-27
北极光(2014年7期)2015-02-09