基于单球轮结构驱动系统的自动导引运输车
2017-08-31 13:10高尚冯凯陈瑞程瑞吕海霆
报刊荟萃(上) 2017年8期
高尚+冯凯+陈瑞+程瑞+吕海霆
摘 要:本设计结合了创新设计理念,根据球形轮胎的全方位驱动结构设计出具有创新型的球形驱动系统;并且根据现有的仓储无人搬运车的起重结构需要旋转车体自身的问题,我们改进出无自旋升降起重机构。
关键词:单球轮结构;驱动系统;自动导引
目前市面上的自动导引车主要是两轮差速行驶机构、三轮行驶机构、带舵轮的四轮行驶机构等这三种驱动结构。这几种行驶机构的轮子都是圆柱体形状的,对于两轮的行驶机构需要使用差速法的驱动方式来控制车的转向;三轮行驶机构的前轮是有转向结构控制转向;带舵轮的四轮行驶机构需要利用四个轮子上的转向结构来控制转向。
我们设计的球形轮胎驱动系统不需要差速、不需要转向机构便可以向各个方向运动且不用改变车体的方向。
一个集成环境感测、动态规划、行为控制与执行等多功能于一体的综合系统就是人们所说的AGV小车。它集中了机械、电气、计算机、传感器、自动化控制、人工智能等学科的研究成果,是机电一体化的最高成就的代表,也是目前自动化智能技术发展最活跃的领域之一。自动导引车具有自动导引功能(磁条导航、激光导航等),可以让其沿规划的引导路线运行,具备的功能有安全保护和物体搬运,可以取代叉车等人工辅助车辆等传统物体搬运机械设备,无人化、高效率是它的特点。自动导引车它可以实现物品快速搬运,还能根据货架的高度进行调节,货物可以直接放到货架上,自动导引车可以自动行驶进货架底部搬运到目的地,全程自动化,快捷省时。它的出现可以节省劳动力,提高效率,从而获取更高的效益。
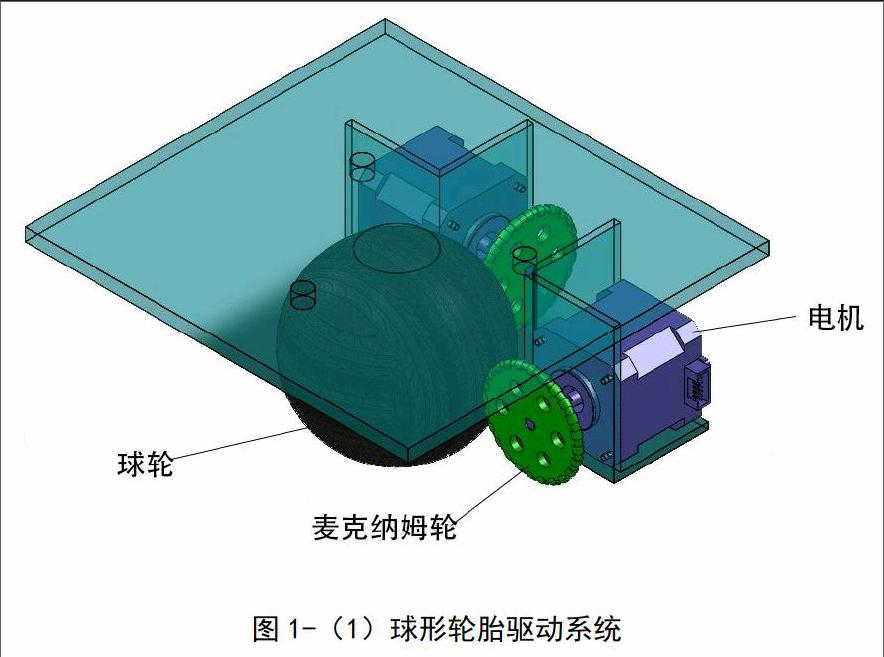
本文创新设计的球形轮胎驱动系统由球形轮胎、伺服电机、麦克纳姆轮等组成。球形轮胎驱动系统整体结构如图1-(1)所示。
球形轮胎驱动系统由两个电机驱动球形轮胎,一个X轴方向上放置一个电机,一个在y轴方向上。如图1-(2)所示,电机旋转带动麦克纳姆轮旋转,麦克纳姆轮带动球形轮胎旋转。因为麦克纳姆轮的特性,所以各个电机驱动时,各个电机互不影响。
参考文献:
[1][美]马西莫·班茨.爱上Arduino[M].北京:人民邮电出版社,2016.3.1
[2]臧海波.机器人制作入门[M].北京:人民邮电出版社,2016.6
[3]刘小波.工业机器人技术基礎[M].北京:机械工业出版社,2016.8
[4][Introduction] Craig. Introduction to Robotics [M].Beijing: Mechanical Industry Press, 2006.6endprint