
基于波速修正和距离权值的风机叶片损伤定位成像方法
2017-08-31 12:27:06惠德畅
无损检测 2017年7期
华 杰,王 强,惠德畅
(南京邮电大学 自动化学院, 南京 210023)
基于波速修正和距离权值的风机叶片损伤定位成像方法
华 杰,王 强,惠德畅
(南京邮电大学 自动化学院, 南京 210023)
针对Lamb波被动监测方法中存在的损伤定位误差较大,检测结果不够直观、准确等问题,以风机叶片为对象,研究了复合材料结构冲击响应波速修正值标定方法和基于像素点对比度的损伤定位成像矩阵,在此基础上提出了基于波速修正值和距离权值的风机叶片损伤定位成像方法。试验结果表明:与传统的被动定位监测相比,该方法损伤定位误差小,成像位置准确。
Lamb波;被动监测方法;风机叶片;定位成像矩阵;波速修正值;距离权值
风能作为一种可再生的清洁能源得到了广泛的应用。风电机组由多种设备组成,包括叶片、发电机、传动系统、储能设备、塔架等,其中,风机叶片是影响整体系统运行状况及决定机组系统运行寿命的重要部件[1]。由于风力发电的环境一般比较恶劣,如海岸、高山、戈壁等,雷雨、飞砂的冲击很容易使风机叶片出现各类损伤,叶片的高自重及旋转多变应力又会使损伤进一步扩展,最终导致叶片断裂、整个机组损毁,造成重大的经济损失。因此,实时监测风机叶片的状态,及时有效地监测风机叶片裂纹的位置及大小,对保证风机设备的可靠运行有重要的意义[2-4]。
Lamb波结构健康监测技术是利用板结构中传播的Lamb波对微小损伤敏感的特性,采用压电阵列技术、先进信号分析与处理技术等实现对结构损伤的在线监测与诊断[5-8],该技术分为主动Lamb波监测法和被动Lamb波监测法。其中,Lamb波被动监测方法能全时段地监测冲击损伤信号,实时准确地监测风机叶片在恶劣环境中运行时产生的冲击损伤[9-10]。目前,大型风机叶片的材料多为纤维增强复合材料,笔者针对风机叶片结构在线损伤监测需求,在现有复合材料结构被动监测成果的基础上,研究了基于波速修正和距离权值的Lamb波被动损伤监测与定位成像技术,进行了传感器阵列的距离权值与平均权值对比试验和传感阵列的距离权值法与四点圆弧定位法的对比试验,说明了与传统的被动定位监测相比,该方法损伤定位误差小,成像位置准确。
1 结构冲击响应波速修正值的标定
现有的Lamb波研究方法中,损伤的定位受到Lamb波波达时间计算精度的影响,波达时间由结构中传播的lamb波波速、结构特性等因素决定[11-12],对冲击响应波速的精确标定十分重要。波速修正值标定时,需要根据压电片传感器阵列的排布和区域的划分,利用理论公式及试验方法得到一个合理的波速恒定值,使冲击损伤的定位更加精确。
利用相邻两个压电传感器的传感数据进行配对,得到多组波速,每对传感器数据得到的波速vij为
(1)
式中:i,j分别为压电传感器对应的编号;ti,tj为经过滤波后标定的i,j号压电传感器的波达时间;si,sj为冲击损伤点到i,j号压电片的距离;j=i+1,j≤K(K为压电传感器个数)。
根据压电传感器个数K将板结构分为R个区域,则发生在第k个区域几何中心处的修正冲击波速为:
(2)
(1) 对于冲击损伤位置对称的两个传感器来说,si=sj,但ti-tj≠0,则需要剔除这样的0项,分母也应相应地减去相对应的项数。
(2) 由于数据采集的误差,一般ti≠tj。但要明确的是,如果出现了ti=tj,需要从vk中剔除相对应的vij分量,分母也相应减1。
通过式(2)求取当冲击损伤发生在不同区域几何中心点时的波速标定值,然后求和取平均值作为波速修正值,如式(3)所示。
(3)
式中:R为压电传感器总个数K所划分板结构的区域总个数;vR为区域R几何中心处修正的冲击波波速。
通过扩展传感阵列和不同方向多次的试验标定来计算冲击响应波的波速,并将其值引入到损伤定位成像算法中。
2 基于距离权值的定位成像方法
在传统的四点圆弧定位方法中,传感器数量较少,单个传感器的误差会影响整体冲击损伤成像的准确性。由于复合材料板的各项异性,传感器距冲击点越远,其传感信息的可信度越低;损伤定位成像时,理论上传感器的数量越多,定位的误差越小。故适当地扩展传感器阵列及对定位成像方法赋距离权值可以提高损伤定位成像的准确性。
2.1 试验对象坐标化及定位方法
利用微元的思想,将板结构表面坐标化,并等分为M×N个等边矩形像素块,单像素点与损伤间的关系如图1所示。像素块的面积取决于整体可接受的误差精度,其边长一般与可接受误差精度处于同一数量级。将每一个矩形像素块的右下顶点作为其坐标值,使坐标的数值都为整数。
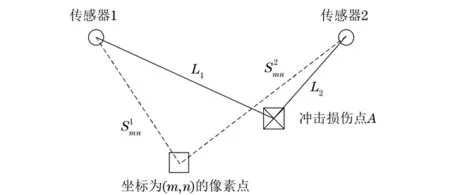
图1 单像素点与损伤间关系示意
(4)

(5)
式中:对比度α的上标r为相邻两传感器的对数;β为权值;S为像素点到各压电片的距离,其上标为压电传感器的编号,下标为像素点的坐标。
扩展传感器阵列中传感器数量需适当,其在满足易受损区域覆盖的同时,尽量减少计算的复杂度及信号处理的复杂性。以8个传感器为例,模拟冲击发生在1,2,7,8号压电传感器所组成的区域中心,使用8个传感器同时对传感器阵列区域进行监测,冲击损伤监测方法如图2所示。

图2 冲击损伤监测方法示意
通过对扩展传感阵列的分析,将相邻两两传感器配对,得到的对比度计算公式为:
(6)
从式(6)可以看出,每个像素点的对比度由相邻两个传感器对比度根据权值的不同求和而成,此权值为距离权值,相对于平均权值,其能够弱化可信度低的传感信息,同时增强可信度高的传感信息。故设定及分配距离权值对定位成像的准确性尤为重要。
2.2 距离权值的设定及分配
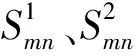
根据传感器扩展阵列的排布及各传感器的信息,如不考虑权值的分配,只需设定每对传感器对比度系数为0.1,即平均权值;如考虑到复合材料板的各项异性及各传感器到冲击点的距离不同,则传感器距冲击点越远,传感信息的可信度越低。各组对比度的权值比可简化为传感器到冲击区域中心点距离的倒数比,即传感器越靠近监测区域,所产生的对比度的可信度越高(权值越高)。以冲击发生在1,2,7,8号传感器区域内为例,设两两相邻传感器距离相等,阵列单元呈正矩形。则每对传感器和冲击发生区域的距离如图3所示。图中距离比为:
(7)
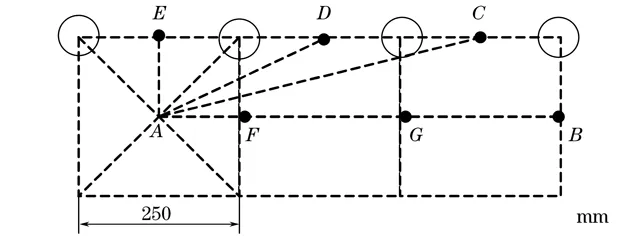
图3 每对传感器和冲击发生区域的距离示意
为简化起见,该方法中距离比与权值比设定为反比,即距离越大,权值越低。则权值比应为:
β18∶β12∶β27∶β87∶β23∶β67∶β36∶β34∶β56∶β45=
(8)
为归一化考虑,分配权值为:
(9)
每一个像素点都将有一个对应的对比度,将这个对比度赋予像素点,能够形成一个由多元素组成的M×N矩阵,对这个矩阵进行成像,能够发现α越低的像素点与真正损伤点的对比差异越低,则其为冲击损伤点的可信度越高,经过设定阈值后,能够在图像上明显看到可信度越高的像素点颜色越深。
3 试验验证及分析
3.1 试验对象及方案 试件(矩形玻璃纤维复合材料板)结构如图4所示,试件厚度为3 mm,尺寸(长×宽)为1 000 mm×500 mm,压电片个数为8,间距为250 mm。试件表面按照压电传感阵列进行排布,试验中压电片距边框125 mm。左下角压电传感器编号1号,逆时针编号1,2,7,8号传感器所组成的区域为A区,2,3,6,7号传感器所组成区域为B区,3,4,5,6号传感器所组成区域为C区。
由于矩阵成像的坐标轴原因,设8号为坐标原点,由原点向1号压电片方向为x坐标轴正方向,由原点向5号方向为y坐标轴正方向。将整个监测区域分为250×750个像素点,每个像素点为1 mm×1 mm的正矩形小块。
图4 试件结构示意
试验系统包括:上位机、NI-USB6366数据采集板卡、多通道带宽电荷放大器、高频功率放大器、已粘贴压电传感器复合材料板等。使用冲击锤敲击结构表面模拟冲击损伤。
3.2 传感器阵列的距离权值与平均权值对比试验
首先使用冲击锤敲击结构表面模拟冲击损伤,坐标为(125,125),压电传感器接收到冲击损伤信号, 由采样频率1 MHz计算得1~8号传感器波达时间分别为1.362,1.366,2.020,3.759,3.628,1.416,1.018,1.335 ms。1号传感器的原始和滤波后的冲击响应波形如图5所示。
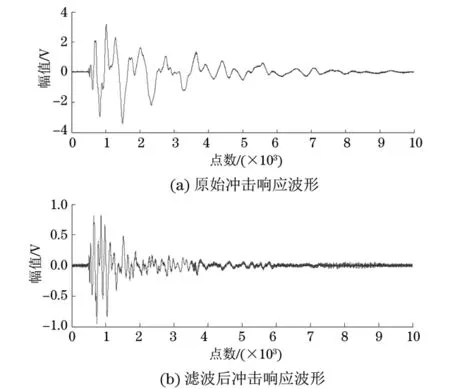
图5 原始和滤波后的冲击响应波形
根据波速修正值的标定原理,进行多次试验得到的波速修正标定值v为2 407.7 m·s-1,并以式(5)作为基准计算每一像素点的对比度,形成M×N阶矩阵,每一个元素为每个像素点的对比度,对比度最低的即为损伤定位点。利用MATLAB软件进行计算,如各组分配权值相同,其损伤定位点为坐标(114,129);如按照距离比分配权值,其损伤定位点为坐标(117,126),平均权值和距离权值的定位对比如表1所示(其中偏离差为坐标差与传感阵列边长d的比值)。
通过表1可得,相对于平均权值,基于传感器扩展阵列的距离权值方法的冲击定位误差有了一定的减小,提高了定位的精度。此时,对M×N阶像素点对比度矩阵进行成像,得到基于平均权值的成像效果,如图6所示。
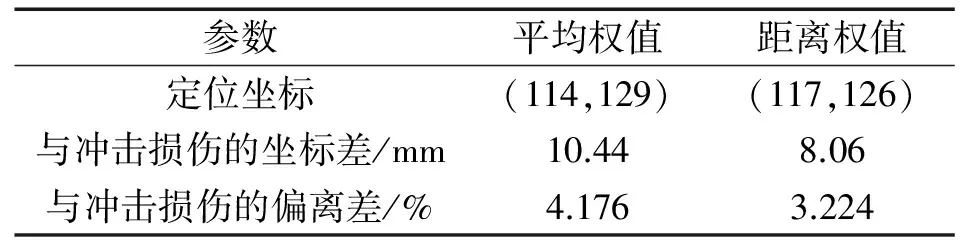
表1 平均权值和距离权值的定位对比
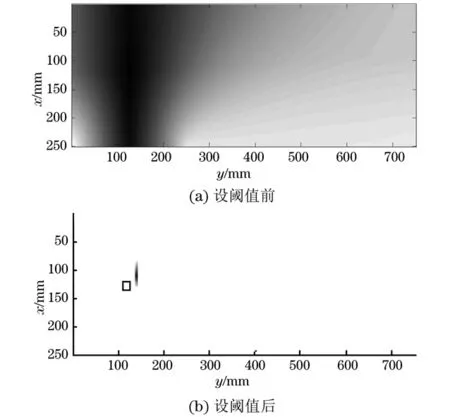
图6 设阈值前后的基于平均权值的损伤成像效果
利用同一数据,对基于距离权值的M×N阶像素点对比度矩阵进行成像,其损伤成像效果如图7所示。

图7 设阈值前后的基于距离权值的损伤成像效果
图6和图7分别为设阈值前和设阈值后的损伤成像,图6(b)和图7(b)中白色的方块为实际损伤冲击点。在设阈值前,基于距离权值的黑色加深区域明显小于平均权值的黑色加深区域(黑色加深区域为像素点逼近冲击点的区域,即对比度小);在设阈值后,可以观察到基于距离权值的损伤点更加靠近实际的冲击损伤点。
3.3 传感器阵列的距离权值法与四点圆弧定位法的对比试验
Lamb波被动监测技术中的四点圆弧定位方法以4个压电片为圆心,速度乘传播时间为半径得到4条圆弧的交点。基于扩展阵列的距离权值定位法是对像素点对比度进行信息权值的赋予,并形成对比度矩阵,利用MATLAB软件求出对比度矩阵中的最小值,即损伤点的坐标。
为了验证该方法的适用性,该对比试验的冲击损伤设定为B区域的中心点,故使用冲击锤敲击结构表面的模拟冲击损伤的坐标为(125,375)。通过两种方法分别定位冲击损伤对应的坐标,并计算定位误差,两种方法损伤定位误差对比如表2所示。
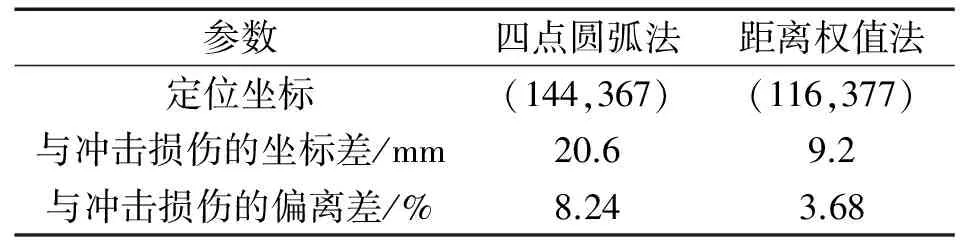
表2 两种方法损伤定位误差对比
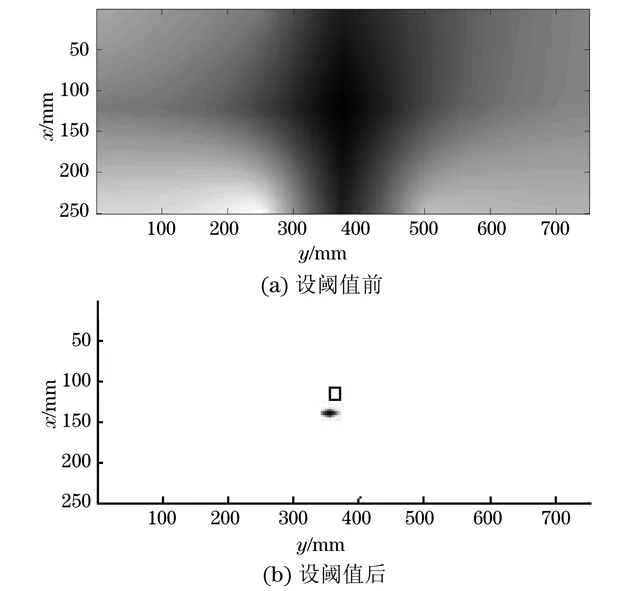
图8 设阈值前后的四点圆弧法损伤成像效果
为了丰富表征结果,对四点圆弧法和基于距离权值的m×n阶像素点对比度矩阵进行成像,四点圆弧法损伤成像效果如图8所示,基于距离权值的损伤成像效果如图9所示。
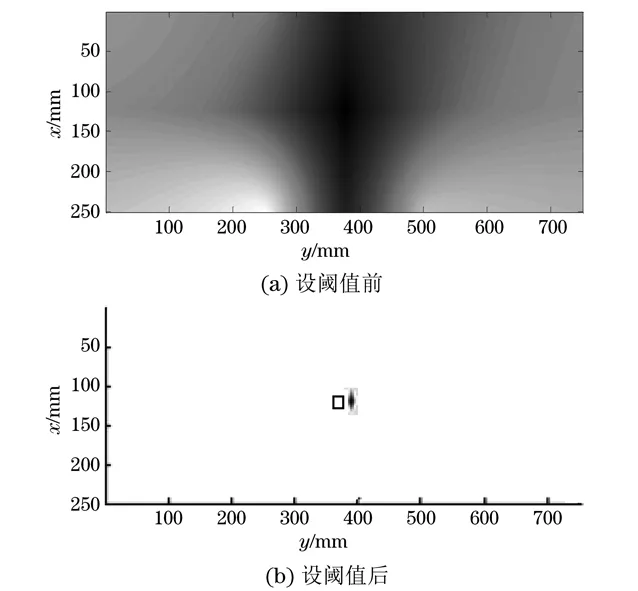
图9 设阈值前后的距离权值法的损伤成像效果
图8(a)和图9(a)中颜色逐渐加深的黑色区域为损伤逼近区域,传感阵列的距离权值法相较于四点圆弧法更加逼近冲击损伤定位点,定位的精度更高。
4 结语
(1) 研究了波速修正值的标定方法,计算了冲击响应波速修正值。将此值应用在距离权值的定位成像方法中,提升了试验结果的准确度。
(2) 通过研究基于像素点对比度的损伤定位成像矩阵,提出了扩展传感阵列的距离权值定位成像方法。通过对比试验,冲击损伤的定位精度得到提高。
[1] 孙丽梅.风能利用现状及前景分析[J].内蒙古电力技术,2010,28(6):9-11.
[2] LI X,YANG Z,ZHANG H,et al.Crack growth sparse pursuit for wind turbine blade[J]. Smart Materials and Structures,2015,24(1): 2-9.
[3] 李晓艳,孙耀宁,钟建友.风机叶片材料和结构设计浅析[J].装备制造技术,2015,43(1):164-166.
[4] 朱永凯,潘仁前,陈盛票. 基于声发射传感器阵列的风机叶片结构健康监测方法[J].无损检测,2010,32(10):753-756.
[5] HAYNES C,TODD M.Enhanced damage localization for complex structures through statistical modeling and sensor fusion[J]. Mechanical Systems and Signal Processing,2015,54/55:195-209.
[6] 袁洪芳,周璐.基于声发射信号的风机叶片裂纹定位分析[J].计算机工程与设计, 2011,32(1):320-323.
[7] LI D,CHUN M H,SONG G.A review of damage detection methods for wind turbine blades[J]. Smart Materials and Structures,2015, 24(3): 1-4.
[8] 袁慎芳.结构健康监控[M].北京:国防工业出版社,2007.
[9] MISHRA S,KUMAR A,MISHRA R K.Structural health monitoring and propagation of lamb waves to identification of crack[J].Materials Today,2015,2(4/5): 1833-1840.
[10] 季赛,黄丽萍,孙亚杰.面向无线传感结构健康监测的压缩感知方法研究[J].传感技术学报,2013,26(12):1740-1746.
[11] STEPINSKI T, AMBROZINSKI L, UHL T. Damage imaging using Lamb waves for SHM application[C]. AIP Conference Proceedings.[S.l.]:[s.n], 2015.
[12] QUITERIO G M,CARLOS,GARCIA M,et al.A new fault location approach for acoustic emission techniques in wind turbines[J].Energies,2016,9(1):1-14.
Damage Localization and Imaging Method Based on the Corrected Wave Velocity and the Distance Weighting for Wind Turbine Blade
HUA Jie, WANG Qiang, HUI Dechang
(College of Automation, Nanjing University of Posts and Telecommunications, Nanjing 210023, China)
Aiming at the problem that the damage localization error exists in the Lamb wave passive monitoring method,and the detection result is not intuitive and accurate,a solution for damage localization and imaging for wind turbine blade is proposed that is based on the corrected wave velocity and the distance weighting. The proposed solution assesses the structure of wind turbine blade and studies the revised velocity of shocking response wave demarcating method to the structure of composite material and damage location based on pixel contrast imaging matrix. The provided experiment results demonstrate that compared with traditional passive positioning monitoring, the locating error of the proposed method is smaller and the imaging position is more accurate.
Lamb wave ;passive monitoring method; wind turbine blade; orientation imaging matrix; corrected wave velocity; distance weighting
2016-12-03
国家自然科学基金重点资助项目(61533010);中国博士后基金资助项目(2015M570401);南京邮电大学先进技术研究院开放基金资助项目(XJKY15005);南京邮电大学科研资助项目(NY215093)
华 杰(1992-),男,硕士研究生,主要从事结构健康监测、精密仪器等方面的研究
王 强,wangqiang@njupt.edu.cn
10.11973/wsjc201707007
TN911.7;TB332;TG115.28
A
1000-6656(2017)07-0033-05
猜你喜欢
铁道建筑技术(2021年4期)2021-07-21 05:32:46
压电与声光(2019年1期)2019-02-22 09:46:06
铜仁学院学报(2018年6期)2018-07-05 09:47:40
电脑知识与技术(2018年35期)2018-02-27 13:29:44
自动化学报(2017年11期)2017-04-04 02:52:44
地震地质(2015年3期)2015-12-25 03:29:41
电视技术(2014年11期)2014-12-02 02:43:28
振动、测试与诊断(2014年6期)2014-03-01 01:14:55
振动、测试与诊断(2014年6期)2014-03-01 01:14:49
河北工程大学学报(自然科学版)(2014年3期)2014-02-27 13:46:20
