导航系统中电涡流效应的实际应用
2017-08-30 18:28张泽宇
自动化仪表 2017年8期
张泽宇
(南京师范大学南瑞电气与自动化学院,江苏 南京 210042)
导航系统中电涡流效应的实际应用
张泽宇
(南京师范大学南瑞电气与自动化学院,江苏 南京 210042)
导航系统能够根据具体路径的实际状况实现精准循迹,因而对平台传感器的设计要求很高。开发了基于电涡流原理的自动导航控制系统,对金属线圈电涡流传感器信号采集处理与优化、系统机械控制、控制算法的执行和调试等环节进行了试验,并配合硬件进行系统平台的搭建。同时,采用逻辑门及频压转换电路等方案替代传统的电感数字转换器,作为循迹遥感模块来识别路径。采集信号并将其转换为能被单片机识别的数字信号,通过陀螺仪加速度传感器来控制系统的运行质量。通过建模,优化了传感器工作时存在干扰噪声的问题;针对传感器检测范围和距离小的问题,提出了通过增大线圈尺寸、加一级放大电路来扩大传感器检测范围的方法;针对传感器数据可靠性、鲁棒性不高的问题,提出了对传感器数据的归一化处理方法。测试结果表明:该系统具有较高的避障成功率和控制精度。
导航系统; 自动控制技术; 电涡流原理; 硬件平台; A/D转换; 陀螺仪; 自动循迹; 精度控制
0 引言
随着社会的不断发展,传感器技术现已成为集机械、电子、计算机、自动控制等多学科于一体的尖端技术。与此同时,道路通行能力、交通安全性、能源损耗等问题也越来越突出。目前,国内外普遍认为道路偏离系统、自动巡航控制等都可以大大减轻驾驶人员的工作量,提高交通系统的安全性。这些解决方案引发了新的研究和应用的热点。比如车辆自动驾驶,其通过计算机控制、人工智能和传感模式识别技术,可实现更好的通行能力和更安全的行驶,甚至可以在无人控制的情况下完成复杂危险环境的作业任务。
基于此,本文以第三代循迹小车为研究对象[1-2],通过对简易车模的试验,着力设计开发电涡流传感器控制的智能导航平台。在车模的实际运行中,需要借助电感数字转换器模块对金属传感器采集到的路况信息进行转换处理,并通过加速度传感器 MMA7361以及MPU6050的陀螺仪模块进行角度融合,以获取车模姿态优化路径。
1 传感器系统选型与设计
1.1 传感器的测量原理及可行性
探测金属的电涡流传感器,其基本原理是利用金属在交变磁场中感应出涡流的特性,定量检测出线圈到金属的相对距离;当金属线圈中流过正弦交变电流时,周围就会产生正弦交变磁场,使得置于磁场中的金属导体产生感应电涡流。根据楞次定律,此感应电涡流产生的交变磁场将阻碍原磁场的变化,因此电涡流磁场对于传感器线圈来说,相当于一个次级线圈。电涡流传感器的基本原理如图1所示。
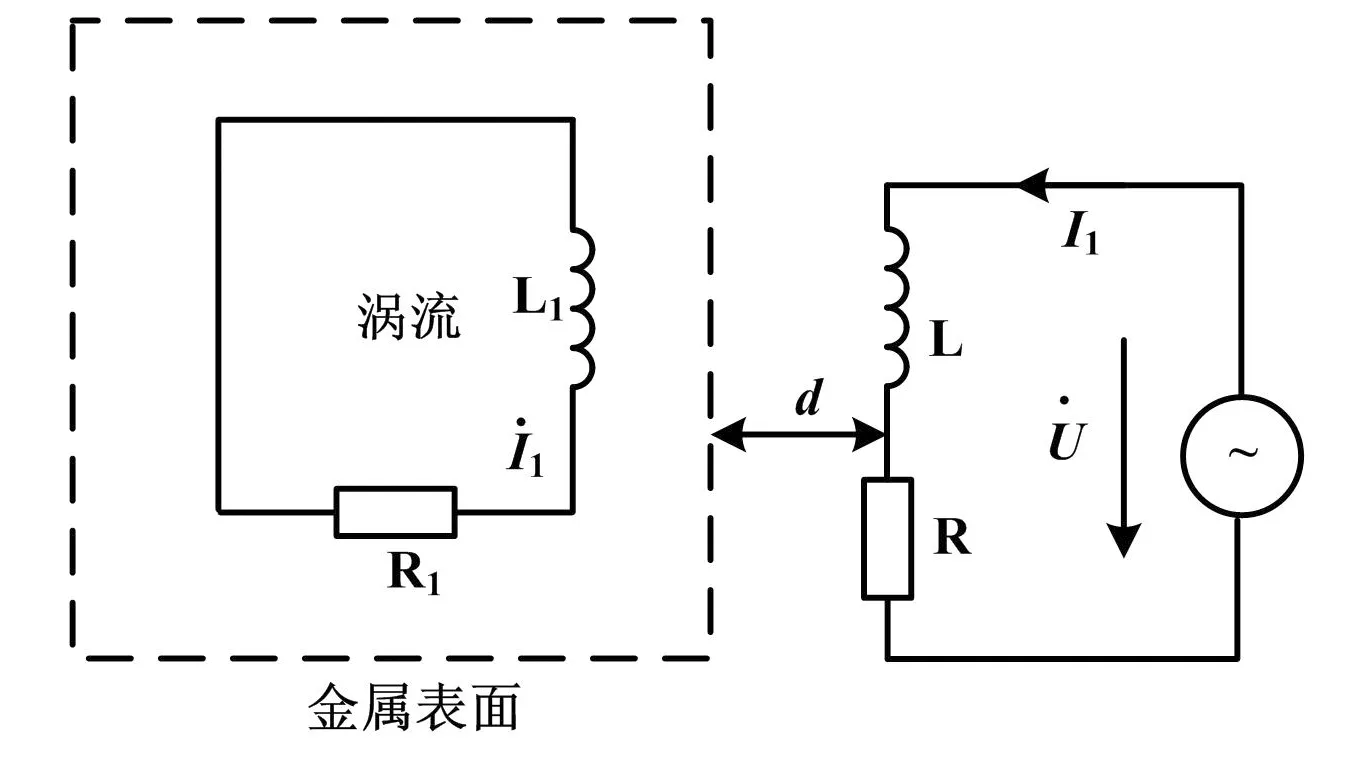
图1 电涡流传感器基本原理图
根据基尔霍夫电压定律,有:
(1)
式中:R、L分别为传感器线圈的电阻和电感;R1、L1分别为涡流回路的等效电阻和电感;M为线圈与金属之间的互感。

(2)
因而线圈的等效电阻和电感分别为:
(3)
(4)
由式(3)和式(4)可知,在涡流的影响下,线圈的等效电阻变大,等效电感变小。线圈电抗值的改变与其形状、振荡频率,以及金属的相对位置、电导率、磁导率都有关。在线圈形状、频率以及金属种类都确定的情况下,电抗值的变化能够反映线圈与金属之间的相对位置。检测线圈与被测金属之间的相对位置参数主要包括距离和重合面积,如果维持距离不变,则相对位置主要由金属线圈与被测金属之间的重合面积决定。
检测线圈电抗最常用的方法是将线圈放在正弦波振荡电路的谐振回路中,当线圈的电抗改变,则谐振电路的频率也会随之改变。通过震荡信号的频率变化反映出线圈的电抗的变化,进而可以检测线圈与被测金属之间的相对位置。
如果采用电容三点式振荡电路,则其振荡频率可以近似表示为:
(5)
式中:C1和C2为谐振回路中的两个电容。
由式(4)和式(5)可知,当线圈与金属之间的重合面积增大时,涡流增强,Leq减小,电路振荡频率增大。此时能够根据振荡电路频率的变化情况来判断线圈与金属之间重合面积的变化情况[3]。
在架设传感器时,通常将线圈布置在距离路面一定高度的水平面内,此时线圈与被测金属的相对位置关系就转变为其重合面积的关系。利用电抗反映出的重合面积来识别车身偏离道路中心线情况,进而调控运行方向,这正是电涡流传感器的优越性所在。
1.2 电涡流传感器的局限及优化
多个传感器同时工作时,彼此之间存在强烈的电磁干扰,将严重影响传感器正常工作;而且电涡流传感器检测范围太小,控制精度有限,所采集数据的重复性、鲁棒性不高,无法精确控制快速运动的小车。
1.2.1 传感器线圈间的相互影响
当金属逐渐接近其中1个线圈的下方时,与这个线圈相邻但下方并没有金属的线圈也会感应到一些信号,这些信号会干扰传感器的判断。以2个线圈为例,线圈彼此之间干扰建模如图2所示。
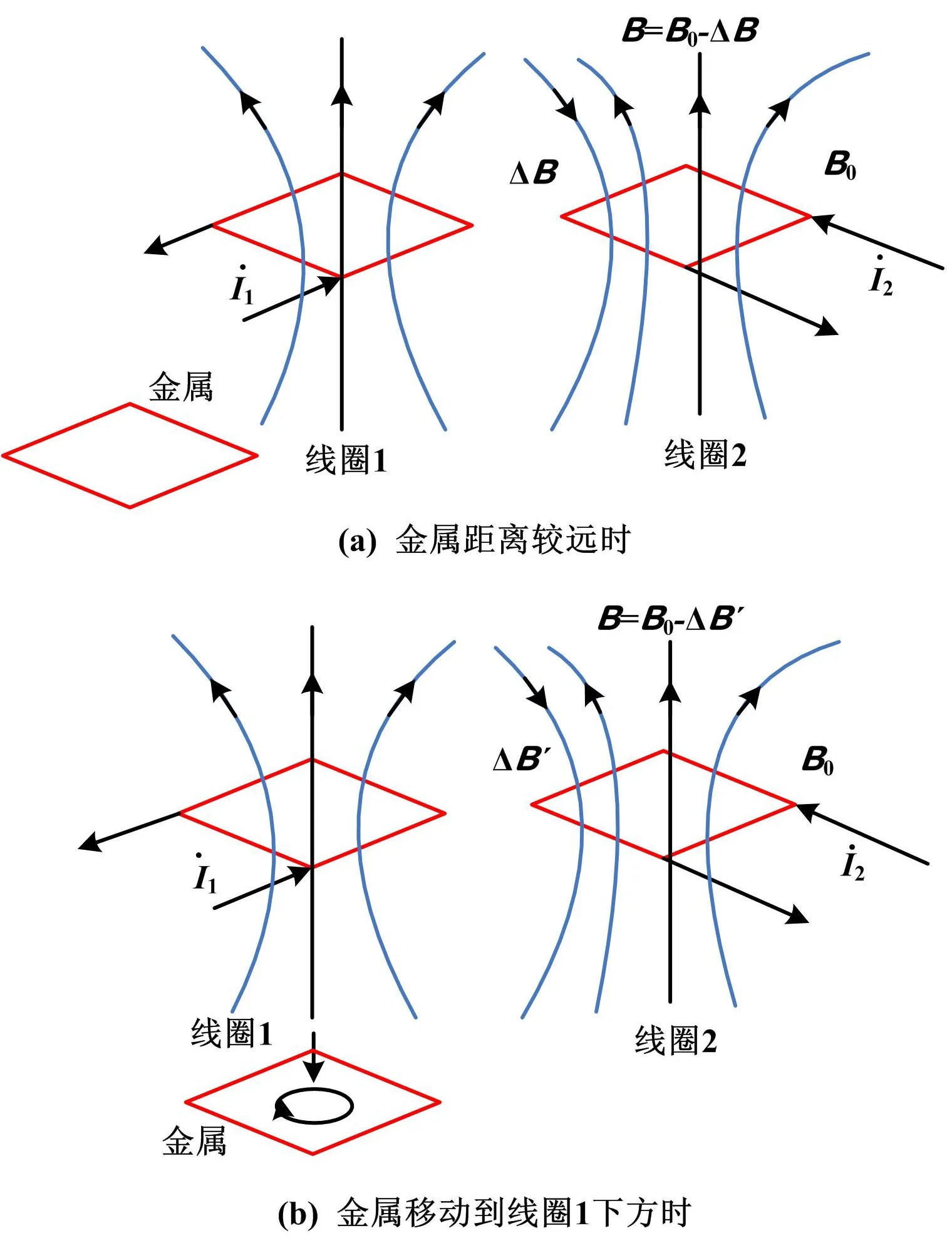
图2 线圈彼此间干扰建模示意图
当金属离线圈1较远时,线圈1和线圈2中有一定的电流,会产生相应的磁场。因此,由安培定则,线圈2处的磁感应强度B为:
B=B0-ΔB
(6)
式中:B0和ΔB分别为由线圈2的电流I2和线圈1的电流I1产生的磁感应强度。因而有:
ΔB∝I1
(7)
又由式(1)可解得:

(8)
由式(6)~式(8)可知,开始时由于金属与线圈1的相对距离不变,涡流强度和I1保持不变,相应的ΔB和B也保持不变。当金属逐渐移动到线圈1下方时,涡流逐渐增强,线圈与金属间的互感M逐渐增大,振荡频率增大。对于涡流而言,电抗变化远大于电阻的变化,所以线圈阻抗逐渐减小;线圈两端电压U变化较小,所以I1会逐渐增大。因此,此时ΔB会逐渐增强,B会逐渐减弱。
对于线圈2,虽然金属不在其下方,但由于线圈1的磁场干扰,线圈2处的磁场被削弱,从而造成了传感器的误判。从电磁兼容角度出发,这种干扰被称为电感耦合传导干扰噪声。线圈1耦合到线圈2处的噪声干扰电压VN为:
VN=jωNBAcosθ
(9)
式中:N为受干扰线圈匝数;A为受干扰线圈面积;θ为线圈平面和磁感线间的夹角。
虽然从公式(9)可以得出很多种减小干扰电压的方法,但大都很难实现。比如,可以通过改变2个线圈间的夹角来改变θ,但实际情况中线圈需要探测正下方金属的情况,因而2个线圈应水平布置[4-5],不存在改变夹角的问题。
改进前后的传感器布置方案如图3所示。

图3 传感器布置方案
由分析可知,转为可行的方法是,在不改变原有功能的前提下,从传感器的布局上着手,加大线圈之间的间距来达到减小B、降低VN的目的。
为了更加线性地反映金属铝箔的位置,曾考虑用改进前的线圈布局方案,但线圈间干扰严重。为了解决这个问题,对线圈布局作了改进。
改进后,线圈间干扰显著降低,每个线圈都能正常工作,使测量效果得到了提升[6]。
1.2.2 传感器探测范围较小
电涡流传感器检测范围较小,一般线圈处在距离道路2 cm的水平面时,就无法检测下面的金属了。这样的传感器在架设时必须贴近地面才能使用,但可能会碰撞道路或因未检测到合适信号而导致预判失误。因此,如何提高检测范围,也是传感器在制作过程中必须解决的问题。
通过分析,选择以下改进方案。
①增大线圈尺寸。
圆形线圈及其产生的涡流区示意图如图4所示。

图4 线圈及其产生的涡流区示意图

(10)
由式(10)可知,增大线圈尺寸可以增大涡流区内径,扩大传感器检测范围,但也会增加传感器之间的干扰,使得其需要隔开更长的距离。因此,在实际使用过程中需考虑平衡这两者[7]。
②增加信号放大电路。
金属放在线圈下方,却没引起线圈所在电路的变化。这不是线圈没有感应到金属,而是金属引起的变化太微弱。因此,加一级信号放大电路可以有效地放大金属引起的变化,进而提高检测范围。如果采用了频压转换电路,那么信号放大电路用运放实现即可。
同样地,放大电路不能无限放大。因为在放大电路中,放大信号的同时也会放大电路的各类噪声。若是线圈放在较高的位置,当金属引起的变化与各类噪声引起的变化为同一数量级时,放大后的信号就难以被利用。
1.2.3 可靠性和鲁棒性不高
把振荡电路的信号经过相关处理后接给单片机读取,就会出现以下的问题。
①当多个传感器同时工作时,对称位置下测得的频率数值不一样,频率变动的范围也不一样。
②当金属铝膜厚度和表面光滑度等各种环境情况改变后,同一传感器在同一位置传回数值有差别。
水安全,包括防洪安全、水资源安全、水环境安全、水生态安全,是国家安全体系非常重要的组成部分。目前我国以水资源区域性短缺、水污染泛滥成灾、城市内涝频发为主要特征的水安全问题十分突出。为完善我国的水安全体系、提高水安全水平,应建立水量水质相结合的水权制度。
针对以上问题,采用归一化处理弥补鲁棒性低的缺陷。用归一化对传感器数据进行处理,处理公式如下:
(11)
式中:n为传感器传回来的实际值;n′为归一化之后的数据;nmax和nmin为在一定环境条件下相应传感器传回数据的最大值和最小值;n0为常数,是使传感器数值归一化的最大值。
归一化处理还可以将线圈与金属的重合面积与传感器所测频率间的线性关系转化为其与归一化后数值间的正比关系,更有利于方向控制。
1.2.4 电感数字转换器的改进方案
传统的电感数字转换器以LDC1000为代表。但是由于 LDC1000 价格昂贵(70~300 元/通道),而且高灵敏度与高采样频率不可兼得,所以在实际过程中存在局限性。通过对其他电路方案的尝试,设计出了改进方案。
使用非门代替二极管作为负反馈回路,可以减少器件数量,同时提高谐振频率。减小探测线圈的电感,可以提高谐振频率,从而在单位时间内采到更多的脉冲来提高灵敏度。同时,较高的谐振频率有助于提高传感器的适应能力。振荡产生的正弦波可以就近通过另一个非门整形为方波。
但是改进后,灵敏度依然略低,在5 cm 高度上仅有万分之三的频率变化。在上一种方案的基础上,实现了频率的直接相减。将原始的振荡信号与晶振基准频率通过异或门进行混频,再经过低通滤波电路,即可得到两个信号的差频。此电路大幅增加了检测电路的灵敏度,使得探测线圈可以在高达10 cm 的距离下稳定检测铝箔位置。
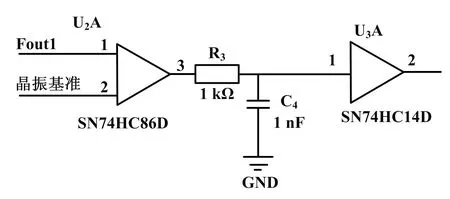
图5 差频电路
2 系统整体平台设计
2.1 系统软件框架
MK60DN512VLL10单片机的A/D转换口在P1口(P1.7~P1.0),有8路10位高速A/D转换器,频率可达250 kHz(25万次/s)。8路电压输入型A/D,可作电池电压检测、按键扫描等。上电复位后P1口为弱上拉型I/O口,用户可以通过软件,将8路中的任何一路设置为A/D转换;不需作为A/D使用的端口,可继续作为I/O口使用。
底层初始化函数如下:
Void system_ init(void)
{
pll _ init(1) ;
//时钟初始化
gpio_ init ( );
//IO口初始化
pwm_ init( );
//P波初始化
interrupt_ init( );
//中断初始化
timer_ init( ) ;
//计时器初始化
uart_ init( );
//串口初始化
i2c_ init( );
//IIC初始化
spi_ init( );
//SPI初始化
adc_ init( );
//AD初始化
pulse_ counter_ init( ) ;
//计数器初始化
PID Init( );
//PID初始化
His_ Init( );
//与程控有关的初始化
}
2.2 传统导航驱动平台设计
按照传感器以及车模各个模块的基本原理,设计并绘制相关原理图,然后通过仿真软件画出PCB板。在拿到实物后,经过一系列焊接以及功能测试,证明平台可以实现基本的行驶功能。随后,将电涡流传感器架设在之前构想的几种不同的位置进行测试,并对采样回传的数据进行分析。试验的归一化前后传感器频率对比如表1所示。
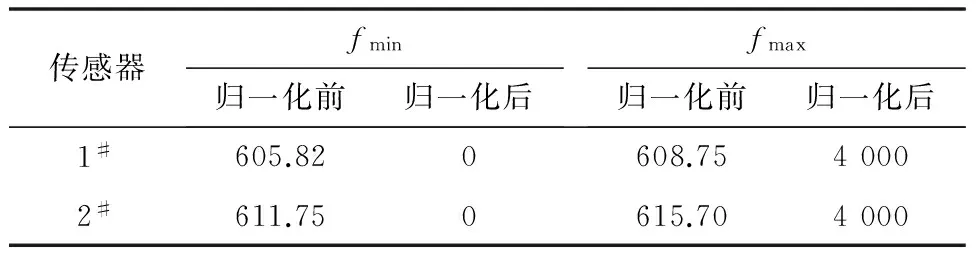
表1 归一化前后传感器频率对比表
通过对比表1中的数据可发现,归一化能够增加传感器的鲁棒性,并能把传感器数值和变化区间不对称的情况按照每个传感器感应能力的大小归一成对称的,因而归一化后无需苛求电路严格对称。若是利用发车之前的一段时间进行归一化,采集nmax和nmin,可以使传感器适应赛场的铝膜厚度等环境因素。
经过反复实践,传感器平台在这种情况下运行情况良好,误差率较低。
2.3 应对极端路径的直立平衡系统探索
在平衡方面,采用陀螺仪加速度模块。陀螺仪传感器是将偏转角度转换成模拟信号,然后经过A/D采集将其转换成数字信号;同时又根据加速度计测得的角速度信息进行融合,控制平衡车左右电机的正反转来控制小车的直立,并根据多个不同位置线圈采集到的信息进行路径规划,通过两轮电子差速实现转向。
将传感器通过3 mm孔径碳素杆延伸到车模以外来检测信号以控制车模的运行,但是实践后发现,在经过坡道或者路面不平整时,信号会出现极端的突变,而且也存在传感器和坡面碰撞的风险。对此,调整了整车机械重心位置及布局,增大了直立倾角,将传感器线圈固定在车身,减少了抖动或者信号突变时带来的误差预判;同时,并且基于车身的传感器架设也可以极大程度地降低与路面碰撞从而造成损坏的风险。
经过多次试验发现,当车身与水平面的夹角接近45°、传感器架设在距离水平面7 cm左右时,运行速度和平稳度最佳。但是如果遇到较大的坡面或路面十分颠簸,可以增大倾角,同时增大碳素杆与车身夹角来实现直立高度最大,传感器保持在7 cm时的数据采集效果较好。
3 调试试验
在整个导航系统完成搭建后,使用数字万用表测试分立元件的阻值、压降、漏电流、截止/导通状态等参数,检验是否存在误差,从而避免原件搭建错误和虚焊的发生。逻辑分析仪用于测试各金属线圈传感器信号的接收与传输,从而避因免传感器的损坏影响系统的功能实现[8]。开启开关,将其放在试验跑道上进行实地试验调试。首先是直道区加上弯道区的调试:通过两边固定的电涡流传感器对金属检测来实现智能小车到达指定的地点。其次是障碍区的调试:应用车头的传感器,当接触到前方有障碍物的时候避开障碍物。小车的运行情状况如表2所示。
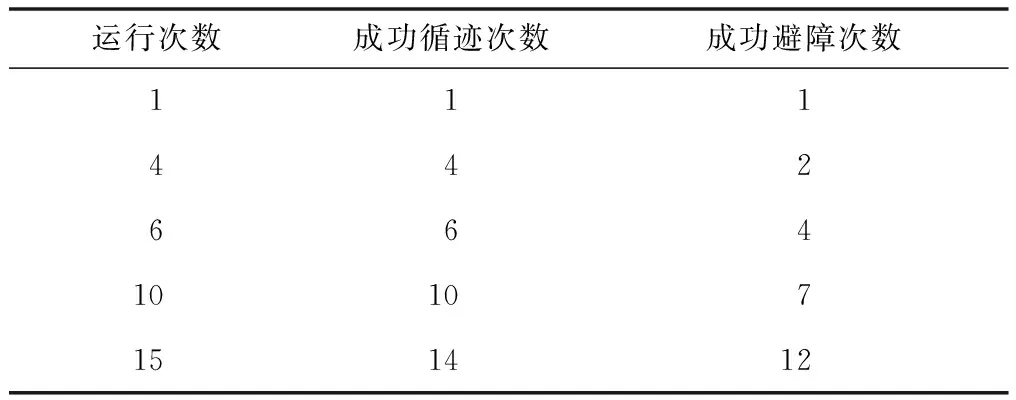
表2 小车运行情况表
4 结束语
本文提出了电涡流传感器的设计方案,对遇到的问题进行研究并提出了解决方案。在调试硬件模块时,将调试的各个电路模块综合起来,采取“逐步综合”的方法,避免干扰。当遇到问题时,先将其中一个模块调试完成后,再结合其他的关联模块综合调试,这样可以逻辑清晰地分析出问题所在[9]。
整个系统的设计以单片机为核心,利用了多种传感器,将软件、硬件相结合。系统在行驶过程中,能够自动检测预先设好的轨道,实现直道和弧形轨道的前进。若有偏离,能够自动纠正并返回预设轨道。当小车探测到前方障碍物时,可以自动报警,调整并躲避障碍物,实现从障碍区通过。小车通过障碍区后,能够自动循迹。
[1] 周文军.双轮驱动智能小车循迹算法研究[J].河北软件职业技术学院学报,2014,16(2):58-60.
[2] 许苑丰.一种智能循迹小车设计方案[J].电子产品世界,2013(11):47-49.
[3] 张培仁.传感器原理、检测及应用[M].北京:清华大学出版社,2012.
[4] 赵阳.电磁兼容基础(英文版)[M].北京:机械工业出版社,2006.
[5] 赵阳,罗永超,陆婋泉,等.传导电磁干扰噪声综合解决方案[J].江苏大学学报(自然科学版),2010,31(4):189-195.
[6] 刘源,张文斌,刘雪扬,等.电磁导航智能车检测和控制系统的研究[J].传感器与微系统,2012,31(4):63-66.
[7] 陈宏.电感式传感器最佳工作条件[J].试验室研究与探索,2016,35(3):32-36.
[8] 隋金雪,杨莉,张岩.“飞思卡尔”杯:智能汽车设计与实例教程[M].北京:电子工业出版社,2014.
[9] 闫琪,王江.智能车设计:“飞思卡尔杯”从入门到精通[M].北京:北京航空航天大学出版社,2014.
Practical Application of Eddy Current Effect in Navigation System
ZHANG Zeyu
(South Institute of Electrical and Automation,Nanjing Normal University,Nanjing 210042,China)
The navigation system is able to implement accurate tracking in accordance with the actual conditions of specific path,which requires a very high level design for the platform sensors.The automatic Navigation System based on eddy current principle is developed,and the signal acquisition,processing and optimization of the metal coil eddy current sensor,the mechanical control of the system,the execution and debugging of control algorithm are tested. The system platform with hardware is set up ,and some logic gates and F/V conversion circuits are used to replace traditional inductive digital converter,to construct remote sensing module for identifying the path.The signal collected is converted into digital signal which can be accepted by the single chip computer,the operational quality of the system is controlled by gyroscope acceleration sensor.The noise interference problem is optimized by modeling,to against the disadvantages of small detection range and distance of the sensor,the size of the coil is increased,and the amplification circuit is added.In order to improve the reliability of the data of sensor,and robustness,the method of normalization for the data of sensor is proposed.The test results show that the system possesses better success rate of obstacle avoidance and control accuracy.
Navigation system; Automatic control technology; Eddy current principle; Hardware platform; A/D conversion; Gyroscope; Automatic tracking; Accuracy control
张泽宇(1995—),男,在读本科生,主要从事智能循迹导航平台及相关传感器的研究。E-mail:15651814707@163.com。
TP24;TH16
A
10.16086/j.cnki.issn1000-0380.201708018
修改稿收到日期:2017-04-01
猜你喜欢
大电机技术(2022年4期)2022-08-30
核安全(2022年3期)2022-06-29
小学科学(学生版)(2021年3期)2021-04-13
装备制造技术(2020年11期)2021-01-26
小哥白尼(趣味科学)(2020年9期)2021-01-18
装备制造技术(2020年12期)2020-05-22
河北省科学院学报(2020年4期)2020-03-19
模具制造(2019年7期)2019-09-25
Coco薇(2015年5期)2016-03-29
汽车维护与修理(2015年6期)2015-02-28