自抗扰控制在串级过热汽温系统中的应用
2017-08-30 18:28马永光
自动化仪表 2017年8期
马永光,邢 建,王 朔,石 乐
(华北电力大学控制与计算机工程学院,河北 保定 071003)
自抗扰控制在串级过热汽温系统中的应用
马永光,邢 建,王 朔,石 乐
(华北电力大学控制与计算机工程学院,河北 保定 071003)
针对串级过热汽温控制系统对象的大惯性、大时滞和动态模型随负荷等要素变动而变动的共性,将非线性自抗扰控制(ADRC)应用在串级过热汽温系统中。利用自抗扰控制不依赖精确模型的特性,及时进行扰动估计和补偿。惰性区回路使用自抗扰控制,导前区回路使用比例积分(PI)控制,形成串级过热汽温控制回路。应用S函数编写自抗扰控制算法,并在Matlab仿真平台下对过热汽温系统的被控对象模型进行阶跃响应、模型失配和鲁棒性3种仿真试验。阶跃响应试验以62%负荷下的过热汽温系统动态特性传递函数为被控对象,加入一定比例的喷水扰动和输出扰动进行仿真。模型失配试验以比例增益和时间常数增大或减小一定比例进行仿真。鲁棒性试验以不同负荷下的动态特性模型为被控对象进行仿真。仿真结果表明:与PID-PI相比,ADRC-PI控制对不确定对象的精确模型具有更好的控制动态性能、鲁棒性,以及更强的抗干扰能力。
串级过热汽温系统; 非线性; 自抗扰控制; 阶跃响应; 模型失配; 鲁棒性; 抗干扰
0 引言
在燃煤机组中,串级过热汽温控制系统对机组的稳定和经济运行起至关重要的作用。过高的蒸汽温度,会降低过热器管道强度,不利于机组设施的安全运转;过低的蒸汽温度,会降低循环效率。因此,过热汽温控制系统在电厂锅炉中是一种极为关键的热工系统。
过热汽温控制系统一般使用分级式PID串级控制方法,但控制效果一般都不太好[1]。自抗扰控制(active disturbance rejection control,ADRC)是韩京清先生继承PID优点,采用试验仿真而得到的一种新型实用控制器。其核心思想是通过状态观测器,实时估计对象因模型参数变化引起的内扰动和模型本身之外的外扰动;同时,通过非线性状态误差反馈律对总扰动进行动态线性补偿,从而使被控对象模型取得较好的效果[2]。韩京清等将自抗扰技术应用于时滞对象中,并取得较好的效果[3]。高志强详细分析了自抗扰控制技术,并说明了其具有较好的鲁棒性[4]。林永君将自抗扰技术应用在循环流化床床温系统中,解决了时变和大迟延等控制难点[5]。程启明等将自抗扰控制技术应用在汽包水位系统中[6]。自抗扰控制技术对大惯性和大时滞对象有很好的控制功能,而且可以及时估计和补偿动态特性随负荷等要素变动而形成的内外扰动。因此,本文将自抗扰技术用于串级过热汽温系统,并通过仿真论证该技术的有效性。
1 自抗扰控制技术原理及整定
1.1 自抗扰控制器原理
自抗扰控制器主要由3个模块组合而成[7]。自抗扰控制结构如图1所示。
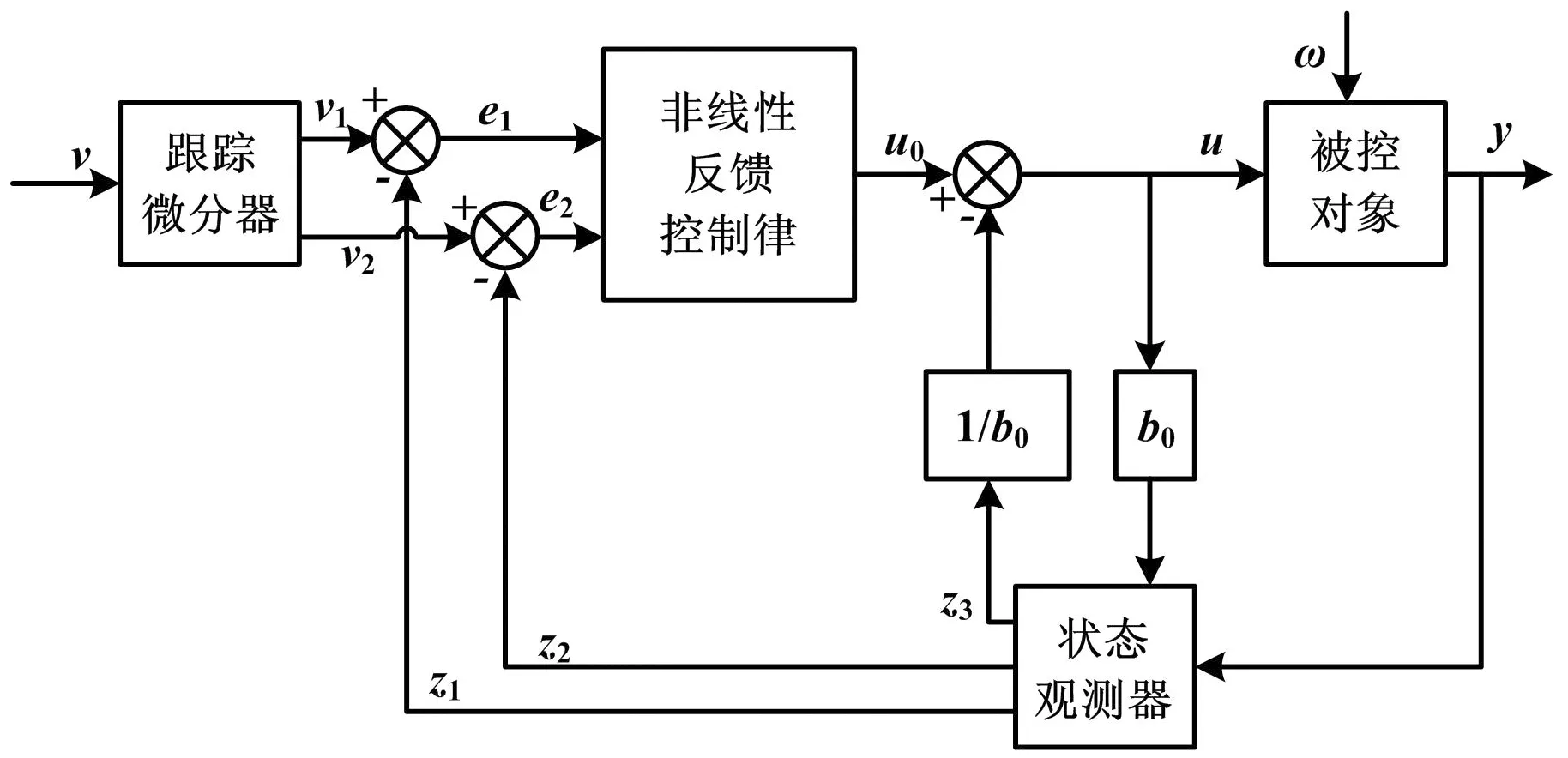
图1 自抗扰控制结构图
图1中:v为设定值输入;y为输出;u为控制量;e为误差;z为状态估计信号;w为扰动。
以一个二阶控制对象为例,分析自抗扰控制技术原理:

(1)

1.2 跟踪微分器
跟踪微分器(tracking differentiator,TD)对设定的输入信号v产生2个输出,分别为v的跟踪输入信号及其导数微分信号。二阶TD的离散化算法为:
(2)
式中:v1为安排过渡跟踪信号;v2为提取的微分信号;h为采样步长;h0为滤波因子,r为过渡过程快慢因子;fst(·)为非线性函数。
fst(·)定义如下:
(3)
式中:d、d0、y0、a0、a为中间变量。
1.3 扩张状态观测器
扩张状态观测器(extended state observer,ESO)对控制量u和输出y进行估计,得到y的状态变量z1、z2的估计值,以及系统已建、未建模动态和未知内外扰动的总估计值z3。三阶ESO的离散化算法为:
(4)
式中:β01、β02、β03为3个主要可调参数;fal(·)为非线性函数。
fal(·)定义如下:
(5)
1.4 非线性状态误差反馈控制律
非线性状态误差反馈(nonlinear state error feedback,NLSEF)控制律[8]的离散化算法为:
(6)
式中:e1、e2为v1、v2分别和z1、z2形成的差值;δ0、β1、β2为可调参数;b0为决定补偿强弱的因子。通过ESO的总扰动估计值z3与参数b0决定控制量u。
因自抗扰结构使用特殊的非线性组合和构造,调节参数多且繁琐,所以依据自抗扰控制器3个模块的离散化算法[9],采用S函数编写[10]自抗扰算法并分步整定参数。
1.5 ADRC参数整定
由二阶自抗扰控制器结构分析可知,ADRC未知参数多、调节难度大。因此,根据每个控制结构参数的特点,可大致确定一些参数,再利用分离性原理确定其他参数。
①TD参数。
TD有3个参数:r、h和h0。r是决定过渡过程快慢的参数,r的取值越大、过渡过程越短,反之则越长;h一般取0.01的采样步长;h0会影响滤波的效果,取值一般大于采样步长就能消除超调现象。
②ESO参数。
ESO的稳定性取决于参数β01、β02、β03的值。其中,β03对系统的影响是最大的;当β03增大时,状态量跟踪速度加快,但会导致精度变差,且造成系统振荡;当β03减小时,状态量跟踪速度减慢,造成大的相位延迟,但是精度会得到提高。因此3个参数协调整定才能增强ESO的观测能力,达到理想的控制效果。
③NLSEF参数。
NLSEF中,参数b0和控制量u、状态观测器的状态变量z3有关,b0值的改变等同系统总扰动值改变,一般b0取较大值能够很好地对对象已建、未建模型动态和未知内外扰动动态特性补偿;参数β1影响系统的调节速度,如果调节速度不快时可适当增大β1;参数β2可以影响系统超调量和振荡幅度,当调节速度加快引起超调量增大时,可适当增大β2,减小振荡。
2 串级过热汽温系统ADRC系统设计
2.1 火电厂过热汽温系统特点与动态模型
串级过热汽温系统的作用是维持锅炉出口蒸汽温度在设定值,保护机组安全经济的运行。为了不破坏过热器,管壁温度不允许接近临界运行。许多段过热器安置在炉膛温度较高的烟道,通过在每段间隔采用喷水减温装置降低过热蒸汽温度[11]。过热汽温系统简化示意图如图2所示。图2中:左面过热器区域是导前区,右面的是惰性区,θ1为导前汽温,θ2为过热器出口汽温。

图2 过热汽温系统简化示意图
在电厂炉膛中,有许多因素会导致过热器出口蒸汽温度改变,但主要是蒸汽流量D、减温喷水流量W和烟气热量Q在控制通道影响其汽温值[12]。W是一个调节变量,该调节通道具有很大的惯性与纯滞后性,一般用高阶惯性环节[13]来代替过热汽温的传递函数:

(7)
一般用惯性环节加纯时滞环节来代替D与过热汽温的动态关系:

(8)
式中:时间常数TD一般较小;纯滞后时间τD较小;因Q对汽温的惯性和时滞作用影响不明显,因此用二阶对象来代替。

(9)
式中:θg(s)为烟气温度。
串级过热汽温系统一般通过改变减温喷水流量W来调节过热汽温。某电厂超临界300 MW单元机组的过热汽温动态模型传递函数[14]如表1所示。

表1 过热汽温动态模型传递函数
从表1可见,随着机组负荷的升降,导前区和惰性区被控对象的动态特性增益、时间常数和等效纯滞后参数都发生了变化。
2.2 串级过热汽温模型ADRC-PI方案
在过热汽温系统中,因过热汽温模型惯性和时滞都很大,所以每级过热器都安置温度测点,一个测量导前汽温,另一个测量过热器出口汽温,这两个输出作为串级过热汽温系统的被调量。在串级回路中,导前区回路的作用是能很快对导前汽温θ1的差值进行修正,对过热器出口汽温θ2只提供粗调,是一个快速回路。因惰性区传递函数的惯性和时滞比导前区传递函数大很多,在喷水减温W调节下,θ1的响应比θ2快很多,所以导前区路常使用PI控制。惰性区回路使用ADRC,能很好地抑制惰性区传递函数的大惯性和时滞,同时补偿喷水和输出产生的扰动。目前,二阶ADRC的技术知识较全面,参数选取有一定的规律,因此,惰性区回路使用二阶ADRC。由表1可知,惰性区对象等效模型是四阶模型,但ADRC控制器具有降阶控制的功能,通过改变数值大小就能实现二阶控制阶数高的传递函数,仍然能达到优良的性能。
大多半锅炉串级过热汽温对象采用PID-PI串级控制结构[15],如图3所示。但随着机组参数越来越大、负荷条件越来越复杂,经典PID策略不能实现较好的控制效果。

图3 PID-PI串级控制结构图
图3中:f1为喷水扰动;f2为输出扰动;W1(s)为导前区等效纯滞后动态模型;W2(s)为惰性区等效纯滞后动态模型;y为过热器出口汽温输出。
由于ADRC技术的独特性,ADRC-PI方案在串级过热汽温系统中的调节效果优于传统PID-PI方案。基于自抗扰技术的ADRC-PI串级控制结构如图4所示。
3 仿真试验与分析
大多数锅炉过热汽温系统导前区、惰性区均采取PID控制策略。本文基于非线性自抗扰技术的过热汽温串级模型,其惰性区模型使用自抗扰控制器,导前区模型使用PID控制,采用独立性原理对ADRC的3个核心模块参数进行分步整定。仿真试验分为以下3个部分。
①分别对惰性区模型使用PID控制器和自抗扰控制器的过热汽温传递函数进行单位阶跃喷水和输出扰动响应仿真,并在1 000 s处加入60%的喷水扰动、在2 000 s处加入10%的输出扰动,以对比不同控制的控制性能和抗干扰能力。
②分别对某一负荷下动态模型的比例增益及时间常数一起增大和减小15%的摄动,以对比不同控制模型失配下适应性和抗扰性。
③对自抗扰控制器在表1不同负荷下测得的被控对象动态模型传递函数进行鲁棒性仿真,分析自抗扰控制器的控制性能。
以表1中过热汽温系统在62%负荷下测得传递函数为试验对象,在仿真平台下实现参数整定试验研究。
根据衰减曲线法对串级过热汽温PID-PI被控对象进行参数整定,得到惰性区和导前区回路PID的参数结果为:KP1=0.286,KI1=0.005,KD1=0,KP2=15,KI2=0.012 5。
根据分离性整定原则,对串级过热汽温ADRC-PI被控对象进行参数整定,得到惰性区回路ADRC整定参数。TD参数为:r=100,h=0.01,h0=0.35。ESO参数为β01=100,β02=90,β03=1 250,b0=120,δ=0.1。NLSEF参数为β1=0.42,β2=0.24,δ0=0.1。导前区回路PI整定参数为KP2=45,KI2=0.01。
3.1 阶跃响应和扰动仿真试验
以62%负荷下的过热汽温系统动态特性传递函数为被控对象、单位阶跃响应为输入,对惰性区回路使用2种控制策略的系统进行仿真,结果如图5所示。
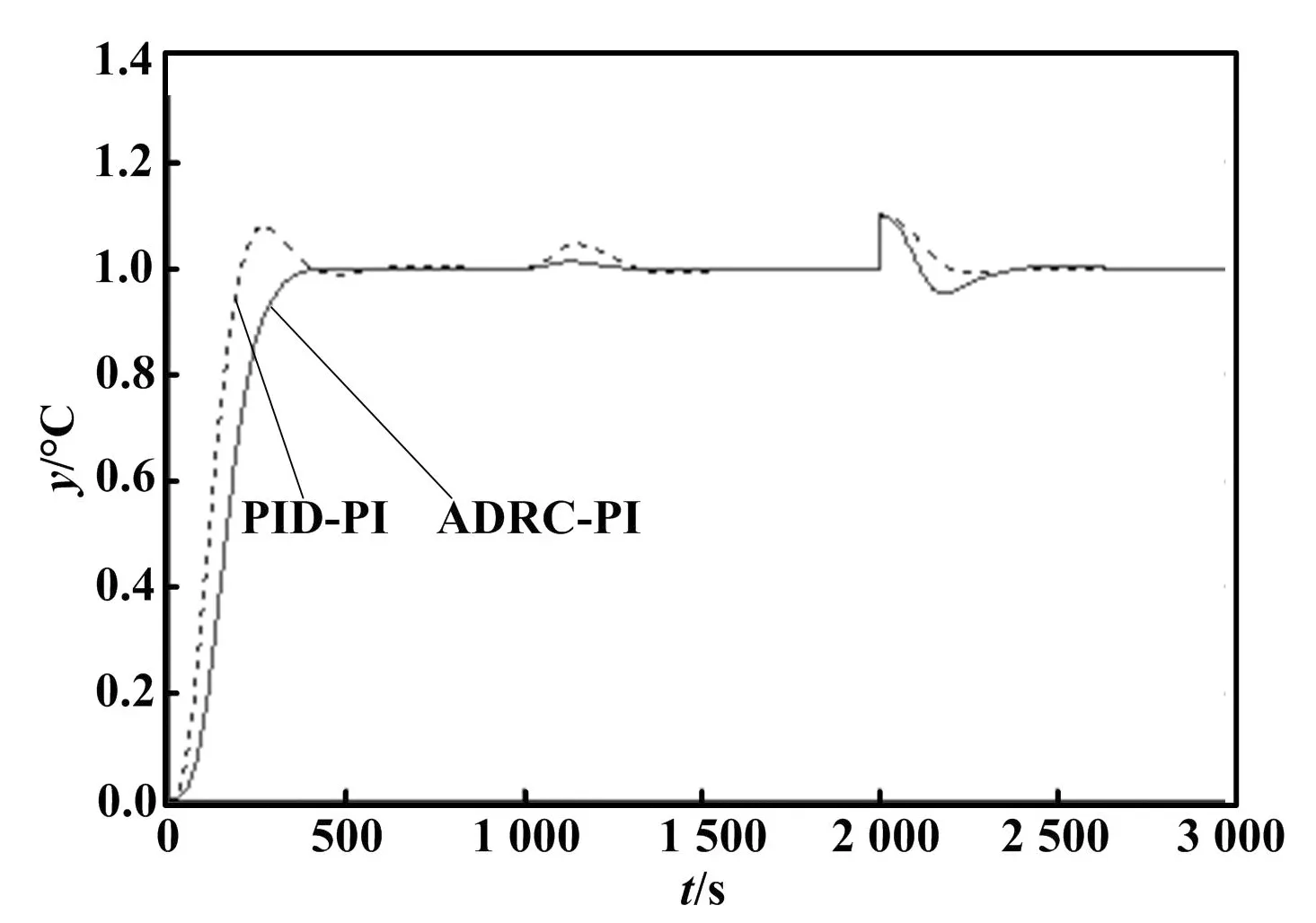
图5 62%负荷下阶跃仿真曲线
62%负荷下,2种控制策略的时域性能指标如表2所示。

表2 62%负荷下的时域性能指标
由图5和表2可见:ADRC的串级过热汽温对象与PID控制的相比,有更好的时域性能指标;惰性区回路使用PID控制的传递函数模型超调量较大、调节时间较长,而使用ADRC的传递函数基本没有超调量、调节时间短。由此可知,ADRC具有良好的控制效果,在喷水和输出扰动下温度值能较快稳定到设定值,有较强的抗干扰能力。
3.2 模型失配仿真试验


图6 模型失配仿真曲线
模型失配下,2种控制策略的时域性能指标如表3所示。

表3 模型失配下的时域性能指标
由图6和表3可见:在模型失配下,ADRC较PID控制有更好的控制效果和性能指标,加入喷水扰动和输出扰动后,惰性区模型使用ADRC较PID控制对象波动小、温度值恢复到设定值时间短,有很好的抗干扰效果。
3.3 鲁棒性仿真试验
令Kp2=25,在62%负荷下模块参数不改变的情况下,分别取30%、44%、88%和100%负荷下的动态特性模型为试验对象,进行自抗扰控制的过热汽温系统鲁棒性仿真试验,仿真结果如图7所示。
由图7可见:在不同负荷下,当系统被控对象模型变化时,ADRC的串级过热汽温系统仍然具备良好的控制效果,说明ADRC有较好的模型适应能力和鲁棒性。

图7 4种负荷下动态模型仿真曲线
综上可见:相对于PID控制的串级过热汽温模型,使用自抗扰控制器策略的对象超调量更小,调节时间更短,抗内外扰动能力更强,并且鲁棒性较强。
4 结束语
本文将自抗扰控制应用在串级过热汽温模型中,并与PID控制相比,证明惰性区模型使用自抗扰控制器比PID控制系统有更好的跟踪效果和动态性能。自抗扰控制器控制的过热汽温系统在扰动下波动更小,恢复到设定值的时间更快,系统抗干扰能力更强;在模型失配的情况下,仍然具备优良的控制性能和抗扰性。同时,鲁棒性仿真试验说明,自抗扰控制有较好的模型适应能力和鲁棒性,值得进一步研究和在实际工程应用中推广。
[1] 苏晨,王文兰,冯永祥.600MW超临界机组主汽温调节器参数优化设计[J].自动化仪表,2015,36(4):10-13.
[2] 韩京清.自抗扰控制技术-估计补偿不确定因素的控制技术[M].北京: 国防工业出版社,2008: 243-315.
[3] 韩京清,张文革.大时滞系统的自抗扰控制[J].控制与决策,1999,14(4):354-358.
[4] 高志强.自抗扰控制思想探究[J].控制理论与应用,2013,30(12):1498-1510.
[5] 林永君,管志敏,彭钢,等.基于自抗扰控制的循环流化床锅炉床温系统的研究[J].热能动力工程,2010,25(5):514-516.
[6] 程启明,郑勇,杜许峰,等.自抗扰控制器串级三冲量汽包水位控制系统[J].热能动力工程,2008,23(1):69-72.
[7] 李洋.基于自抗扰技术的火电厂主汽温度控制方法的研究[D].保定:华北电力大学,2014.
[8] 黄一,薛文超.自抗扰控制:思想、应用及理论分析[J].系统科学与数学,2012,32(10):1287-1307.
[9] 韩京清.自抗扰控制器及其应用[J].控制与决策,1998,13(1):19-23.
[10]马永光,冉宁,赵朋.基于S函数在自抗扰控制器Simulink仿真中的应用[J].仪器仪表用户,2012,19(4):78-80.
[11]郝靖宇.自抗扰控制器的免疫遗传算法优化及其应用研究[D].保定: 河北大学,2011.
[12]彭道刚,杨平,王志萍,等.火电厂主汽温控制系统的免疫PID串级控制[J].中国动力工程学报,2005,25(2):234-238.
[13]黄焕袍,武利强,高峰,等.自抗扰控制在火电厂主汽温控制中的应用[J].系统仿真学报,2005,17(1):241-244.
[14]王东风,韩璞.基于免疫遗传算法优化的汽温系统变参数PID控制[J].中国电机工程学报,2003,23(9):212-217.
[15]冯建苗,李少远.电厂过热汽温串级系统的约束预测控制[J].上海交通大学学报,2011,45(10):1504-1508.
Application of Active Disturbance Rejection Control in Cascade Superheated Steam Temperature System
MA Yongguang,XING Jian,WANG Shuo,SHI Le
(School of Control and Computer Engineering,North China Electric Power University,Baoding 071003,China)
For the common characteristics of the cascade superheated steam temperature control system,i.e.,the large inertia and large time delay;and its dynamic model changes when the load and other important factors change,thus the nonlinear active disturbance rejection control(ADRC) is applied to the cascade superheated steam temperature system.By using the feature of active disturbance rejection control,that is independent of the precise model and timely estimates and compensates for the disturbance;in inert zone loop,the active disturbance rejection control is used,and in the lead area loop,the proportional integral(PI) control is used,to form the cascade superheated steam temperature control loop.The active disturbance rejection control algorithm is written by using the S-function,and under Matlab simulation platform,the controlled object model of superheated steam temperature system is simulated for step response,model mismatch,and robustness.The step response experiment is done at 62% load,with the dynamic characteristic transfer function of the superheated steam temperature system as the controlled object,and a certain proportion of the water spray disturbance and output disturbance.The model mismatch experiment is simulated with the proportional gain and the time constant increasing or decreasing.The robustness experiment is carried out with the dynamic characteristic model under different loads as the controlled object.The simulation results show that ADRC-PI control has better control dynamic performance,robustness and anti-jamming capability than those of the PID-PI to the precise model of uncertain object.
Cascade superheated steam temperature system; Nonlinear; Active disturbance rejection control; Step response; Model mismatch; Robustness; Anti-jamming
马永光(1964—),男,博士,教授,主要从事电力生产过程仿真技术、自动化技术的研究。E-mail:Mr_ma@163.com。 邢建(通信作者),男,在读硕士研究生,主要研究方向为先进控制理论及其在电力系统中的应用。 E-mail:1094306815@qq.com。
TH86;TP29
A
10.16086/j.cnki.issn1000-0380.201708005
修改稿收到日期:2017-03-16
猜你喜欢
农业工程学报(2022年13期)2022-10-09
中阿科技论坛(中英文)(2022年7期)2022-07-29
灌溉排水学报(2022年6期)2022-07-13
核科学与工程(2021年4期)2022-01-12
家园·电力与科技(2021年3期)2021-09-10
新世纪智能(数学备考)(2020年9期)2021-01-04
水泥工程(2020年4期)2020-12-18
山东电力技术(2020年8期)2020-09-02
科学大众(2020年12期)2020-08-13
电子制作(2019年16期)2019-09-27