低空无人机遥感技术在交通工程中的应用研究
2017-08-30 12:18:10
中国建设信息化 2017年19期
1.引言
近年来,随着我国经济建设的高速发展,数字化、智能化城市建设和精细化城市管理逐步迈向新台阶,大比例尺地图在城市规划、建设、交通、管理、社会与公众服务以及可持续发展研究等众多领域的作用日益重要。交通建设对城市发展具有重要意义,其项目周边地形图及影像图对工程设计和施工具有重要作用。然而,交通工程项目一般呈带状分布,且具有距离长、覆盖广、地形复杂、工期紧的特点,也因此给测图工作带来了一定困难。
传统卫星遥感技术虽然能够获取大区域的影像信息,但遥感数据分辨率和时相难以满足工程需求。无人机低空遥感技术是航空遥感领域一个新的发展方向,具有低成本、快捷、灵活机动,以及数据高时效、高分辨率等特点,并已逐步应用于大比例尺地图航空摄影测量领域,凭借自身的技术优势,可快速、高效获取高精度、高分辨率的低空影像数据,成为传统航空摄影测量的有效补充手段。但是,无人机体积小、重量轻、飞行高度低,飞行中易受到外界环境因素影响,导致飞行姿态不稳、影像数据质量差等问题。此外,小型无人机一般携带非量测数码相机,焦距小、像幅小、影像畸变大,给后期的影像拼接、空三加密带来了很大困难。

图1 知行二号无人机
本文采用自主研发的“知行二号”无人机,结合Ardupilot Mega Planner软件规划的航线,获取低空高精度影像数据,利用Photoshop、ERDAS IMAGINE软件对获取的原始影像数据进行预处理,在Pix4Dmapper软件中进行空三加密、影像镶嵌、精度分析,最终获得满足项目要求的DOM成果,可用于交通工程的建设。
2.低空无人机遥感系统及作业流程
2.1 低空无人机遥感系统
无人机遥感系统(Unmanned Aerial Vehicle Remote Sensing,UAVRSS)是一种以UAV为平台,以各种成像与非成像传感器为主要载荷,飞行高度一般在几千米以内,能够获取遥感影像、视频等数据的无人航空遥感与摄影测量系统。目前,成熟完备的民用UAVRSS主要由飞行平台系统、轻小型多功能对地观测传感系统、遥感空基交互控制系统、地面数据快速处理系统、数据传输链路、综合保障系统与装置、地面后勤人员等组成。

表1 技术参数
本文采用自主研发的“知行二号”无人机(见图1)进行航拍,相关参数见表1。航拍时采用Canon EOS M3相机,搭配EF-M 22mm f/2 STM 定焦镜头。
2.2 作业流程
低空无人机遥感作业流程与常规航空摄影测量基本一致,包括技术设计、测区踏勘、航线规划、航测实施、像控布设、数据预处理、空三加密、影像镶嵌、4D成果输出等。但由于无人机遥感在荷载、飞行控制方面以及搭载非量测相机,使得其在畸变校正、像控测量以及空三处理等方面又有不同,具体作业流程如图 2 所示。
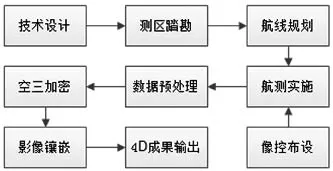
图2 作业流程
3.低空无人机遥感在交通工程中的应用
3.1 案例1:沿海道路改造工程
3.1.1 测区概况
该测区道路改造工程为位于象山沿海,年久失修、交通不便。为此,工程设计单位采用无人机对该测区进行航拍。测区整体为带状,全长9.6km,要求影像分辨率优于5cm,横向宽度200m并输出DOM成果,最终成果平面位置精度优于20cm。
3.1.2 航线设计
航线规划采用Ardupilot Mega Planner软件。航拍相对航高210m,航向重叠70%,旁向重叠65%,航片间距42m,航线间距74m。单张航片地面横向覆盖212m,纵向覆盖142m,平均地面精度3.54cm。考虑到测区为带状,因此常规的区域状航线规划方式不适用于本测区,决定将道路中线往两侧各偏移100m作为航线。
3.1.3 像控布设
像控点的布设方案,按照区域网布点,间隔 4 条基线布设一对像控点,为了保证精度,在区域网凸凹处增添像控点。像控点点位一般应布设在航向及旁向 6 片重叠范围内,困难地区不少于 4 片重叠。相邻子区域间必须有公共像控点。选取的像控点,其目标影像应清晰、易于判读,当目标与其他像片条件矛盾时,着重考虑目标条件。
为了保证影像精度,横向上,在道路中线两侧分别布点,纵向上,每隔500m布设一组点。根据上述布点原则,在奥维互动地图APP上预选点,标记像控点的概略位置并统一编号,规划布点线路。外业布点时,根据现场实际情况,选择合适的标记或地物点作为像控点。每个像控点观测两侧,每次观测10个历元。两次观测误差小于5cm,取两次观测的均值作为该点的坐标值,并据实填写《像控点点之记》。
3.1.4 影像数据预处理
影像数据预处理主要是对影像进行色彩调整,其目的是在尽可能真实的基础上获得一个良好的画面视觉效果,使图面层次丰富,立体感强,色彩和谐美观。色彩调整主要是去除杂色以保证画面整洁干净,调整色阶以使画面层次感增强,调整色差以使画面整体反差效果良好、反差适中,调整饱和度以使色调均匀等等。
传统的方式都是在影像数据空三加密之后、镶嵌正射影像之前,利用航测软件内部的匀光匀色模块对影像进行处理,但其处理效果欠佳。因此,本研究的影像调色在Photoshop、ERDAS IMAGINE等专业影像处理软件中完成,主要应用到的工具有色阶、色相/饱和度、自动色阶、曲线、亮度/对比度等等。调色原则以写实、靠近自然真彩色为基准,在尽少损失实地色彩信息的基础上,平衡整体图像亮度、对比度、清晰度,统一图像色调。
3.1.5 空中三角测量
目前为止,市面上存在着各种自动化程度不同的空中三角测量软件,例如 Lecia公司开发的 Helava 系统,美国 Intergraph公司开发的 Image Station 系统,德国的Inpho 系统等。国内主要使用的有适普公司的 Virtuo Zo、航天远景等系统。本研究采用瑞士Pix4Dmapper软件进行内业数据处理。Pix4Dmapper软件是目前市场上独一无二的集全自动、快速、专业精度为一体的无人机数据和航空影像处理软件,无需专业知识,无需人工干预,即可将数千张影像快速生成专业的、精确的二维地图和三维模型。该软件可自动从影像EXIF中读取相机的基本参数,如相机型号、焦距、像主点等信息,只能识别自动定义相机参数,免去了相机标定的繁琐。
Pix4Dmapper通过高级自动空三计算原始影像的真实位置和参数,完全基于影像内容,利用独特的优化技术和区域网平差技术,自动校准影像,进行自动选点和转点,然后调用平差软件进行平差计算,得出待定点的地面坐标和影像的外方位元素,能够输出标准的空三结果、相机检校、控制点格式。
经过平差计算,像控点及检查点精度见表2。

表2 像控点位平面精度统计表
从表中可知,像控点精度满足《低空数字航空摄影测量内业规范》要求。
3.1.6 DOM制作及精度分析
Pix4Dmapper软件能够自动生成DEM。利用生成的 DEM,经数字微分纠正、数字镶嵌、裁剪等生成DOM,不仅具有地形图的几何精度和影像的纹理特征,信息丰富直观,还可以作为参考评价其他数据的精度。
为了检测DOM精度,采用RTK外业实测30个无投影差地物特征点,如斑马线、水泥地拐角等,对 DOM 进行精度评定。误差统计见表 3。其中,高程误差不在项目要求之内。
经外业实测检核,DOM成果满足测图要求。本研究充分证明了低空无人机遥感技术用于交通工程的可行性。

表3 影像精度统计表
3.2 案例2:宁波轨道交通5号线建设项目
宁波市轨道交通5号线全长30多公里,线路穿过宁波东部新城核心区。该区域原1∶500地形图与现状差距较大,工程设计单位决定采用无人机对全线进行航拍,沿线布设像控点,以确保生产的影像精度能够满足规划设计要求。
本次航测采用Ardupilot Mega Planner软件进行航线规划。航拍相对航高350m,航向重叠70%,旁向重叠50%,航片间距72m,航线间距180m。单张航片地面横向覆盖360m,纵向覆盖240m,平均地面精度6cm。将道路中线往两侧各偏移50m作为航线。原始数据采用Photoshop、ERDAS IMAGINE等专业影像处理软件对原始影像进行预处理,再采用Pix4Dmapper软件对获取的影像进行空三加密解算,最终自动生成DEM、DOM。
为了检测DOM精度 ,采用RTK外业实测40个无投影差地物特征点,如斑马线、水泥地拐角等,对 DOM 进行精度评定。误差统计见表 4。其中,高程误差不在项目要求之内。
经外业实测检核,平面中误差满足《1∶500、1∶1000、1∶2000地形图航空摄影测量内业规范》(GB /T 7930—2008) 要求。

表4 影像精度统计表
4.结束语
无人机低空遥感技术具有低成本、快捷、灵活机动,以及数据高时效、高分辨率等特点,可快速、高效获取高精度、高分辨率的低空影像数据,是传统航空摄影测量的有效补充手段,成为空间数据获取的重要工具。本文结合交通工程的实际情况,采用自主研发的“知行二号”无人机,快速获取测区影像采用自主无人机和飞控软件,快速获取测区影像,利用ERDAS IMAGINE、Pix4Dmapper等专业的软件进行数据处理,获得DEM、DOM成果。最终成果分析结果表明,数据能够满足1∶1000测图要求,证明低空无人机遥感技术可应用于交通工程项目测图,高效、保质地完成任务,可作为传统测绘技术的有效补充手段。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14 03:10:40
河北地质(2021年4期)2021-03-08 01:59:14
写真地理(2020年39期)2020-12-23 02:01:59
理论与创新(2020年15期)2020-10-09 11:07:45
辽宁省博物馆馆刊(2020年0期)2020-08-13 09:15:58
中国铁道科学(2019年5期)2019-10-19 07:55:14
测绘通报(2018年10期)2018-11-02 10:07:28
企业科技与发展(2018年5期)2018-09-10 00:20:39
北京航空航天大学学报(2017年9期)2017-12-18 07:12:31
南方文学(2016年3期)2016-06-12 13:54:34