
机载通信设备波束控制系统设计
2017-08-29 15:00张羽李琳孙高俊
电脑知识与技术 2017年21期
张羽,李琳,孙高俊
(中国电子科技集团第三十八研究所孔径阵列与空间探测安徽省重点实验室,安徽合肥230031)
机载通信设备波束控制系统设计
张羽,李琳,孙高俊
(中国电子科技集团第三十八研究所孔径阵列与空间探测安徽省重点实验室,安徽合肥230031)
波束控制系统是机载通信系统的控制核心之一,文章从工程角度出发,介绍了机载通信波束控制系统的设备组成、原理及工作处理流程,提出了一种两维相扫的机载通信波束控制系统设计方法。该方法具有小型化、高可靠、波束实时跟踪及灵活性强等优点。
机载;波束实时跟踪;高可靠;小型化
1 概述
机载卫星通信控制系统利用我国中继卫星作为天基通信转发平台,在天地间实施空中建链,实现了空中宽带通信信息枢纽的功能,具有即使在高速运动的载体上也能很好地解决宽带多媒体信息,波束控制系统是机载通信系统的控制核心之一,主要关注高可靠性、小型化以及波束控制的快速、灵活性;本系统采用DSP+FPGA作为处理器,可完美解决以上问题。
2 系统组成及功能
系统由波控单元和相应数量的专用连接电缆组成,其组成及功能如图1所示。波控单元接收从综合接口与控制模块通过串口送过来的角度信息及工作模式、频点等状态控制字,通过FPGA解析后送给DSP,计算出各个T/R组件所需的波控码、衰减码,进行锁存、时序分配然后将波控代码、衰减码按照既定时序打入16个T/R组件之中,完成布相;同时将T/R组件的电流信息、温度信息通过串口采集到FPGA中,通过编码之后回送给综合接口与控制模块;或者在接收到自检模式信息后,根据工作模式,控制16个T/R组件完成布相的同时,波控系统将本单元的波控代码、衰减码等数据通过422串口送给综合接口与控制模块,完成分系统自检。

图1 波控系统功能组成框图
3 工作原理
机载通信系统使用的是两维相控阵天线。波控系统的基本功能是根据系统姿态,完成对卫星位置的快速锁定,要求对每个T/R组件内的移相器和衰减器进行准确而快速地控制,实现合成天线波束的电控扫描。在方位角φ和仰角θ这两个方向上实现天线波束的相控阵扫描,如图2所示:

图2 平面相控阵天线
整个阵面在yz平面上,共有M*N个天线单元,单元间距分别为d1(沿z轴方向)和d2(沿y轴方向)。设目标所在的方向以方向余弦(cosαx,cosαy,cosαz)表示,则相邻单元之间的“空间相位差”应是:
⑴按垂直方向(沿z轴方向):

⑵按水平方向(沿y轴方向):

所以,第(i,k)个天线单元与第(0,0)号天线单元之间的“空间相位差”为:

若天线阵内移相器在垂直方向上相邻单元之间的相位差为ΔφBβ,在水平方向上相邻单元之间的相位差为ΔφBα,则第(i,k)个单元移相器相对于参考单元所提供的相移量ΔφBik为:

由于θ=π/2—αz,所以cosαz=sinθ、cosαy=cosθsinφ,设α= ΔφBα、β=ΔφBβ,为了在(θB,φB)方向上获得波束最大值,β和α应为:

4 系统设计
4.1 波控单元设计
波控单元 使用XILINX Virtex-5系列的FPGA、DSP (SM32C6713)及周围电路组成。如图3所示。
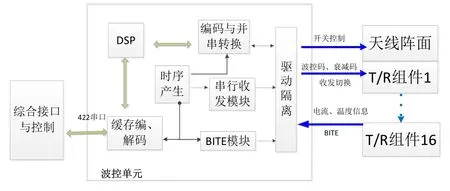
图3 波控单元框图
波控单元主要完成以下功能:
①完成系统初始化,接收综合接口与控制模块的指令,并将指令解析后送给DSP。
除了交通条件外,中东欧各国还在长期历史发展中逐渐形成了各具特色的政治、文化以及宗教模式,各国之间存在较大差异。纵观过去十几年以来中东欧各国发生的重大历史事件我们可以判断,政治、文化、宗教的各种问题严重影响其与世界其他国家的贸易往来。中国对中东欧国家在贸易出口方面一直处于优势地位。但是,在长期贸易交往中,中国与中东欧国家贸易的渠道和种类仍较少。
②DSP根据频点与方位、俯仰角按照相应的算法解算出各T/R组件需要的波控数码;根据功率控制数据解析成对应的组件的衰减码字,将其他控制信号转换为对应的码字后组合成帧并发送至16个收发组件中,完成布相及极化和负载开关的控制。
③将T/R组件的电流信息、温度信息通过串口采集到FP⁃GA中,通过编码之后回送给综合接口与控制模块。
④在自检模式中,根据模式要求,在控制16个T/R组件完成布相的同时,波控系统将本单元的波控代码、衰减码等数据通过422串口送给综合接口与控制模块,完成分系统自检。
⑤波控单元便根据状态控制字产生收发切换时序信号,控制T/R组件的收发开关,同时产生相应状态电平控制两路射频输入通道的选通(二选一),以及两路输出通道的选通(二选一),完成收发转换。
串行传输时序
每个T/R组件有21个BIT数据位,其中包括6位发射移相码、6位接收移相码,6位衰减码,时序如下图:

图4 串转并时序波形图
SDO:输出数据信号,为TTL信号;
CLK:移位时钟信号,为TTL信号,上升沿有效;
LOAD:波位导前信号,为TTL信号,上升沿有效。
4.2 布相方法与时间分析
目前在波控系统设计中普遍采用二级缓存同步布相,即提前将下一波束的布相数据计算好并依次锁存在一级缓存中,当波束进行切换时由波位切换信号将一级缓存中的布相数据同步打入到二级缓存中,二级缓存中的数据将直接控制天线单元。
主要布相时间为:①波控单元解析数据指令所需的时间;②DSP根据角度数据与功率数据,计算出波控码、衰减码所需的时间;③存储器输入输出时间;④异步串行传输所需要的时间。①的时间主要是数据解析、分配时间,不超过10uS量级;②的时间为DSP通过公式计算16个T/R组件所需6位波控码、衰减码所需的时间,功能不太复杂的情况下,一般不超过30uS,留些余量可按50us计算;④的时间由同步串行传输的频率决定,按1M算,约为30us。从接收指令到波控单元布相后的时间为90uS;③的时间一般在ns量级,基本可以忽略。我们把布相时间按100us计算,则布相频率最高可以达到10000Hz,即波控接受控制指令频率可以达到10KHz。
5 系统软件处理流程

图5 波控系统工作流程图
由图5可知,系统工作流程为:
系统开机初始化,然后接收综合接口与控制模块的指令,先判断工作在哪种工作模式,如果处于正常工作模式便对送来角度信息及工作模式、频点等状态控制字,通过FPGA解析后送给DSP,计算出各个T/R组件所需的波控码、衰减码、开关控制码等,进行锁存、时序及数据分配,找出对应的波控代码、衰减码通过并串转换后以二级缓存同步布相的方式按照既定时序将波控数码打入到16个T/R组件之中,完成布相、极化和负载开关的控制;同时将T/R组件的电流信息、温度信息通过串口采集到FPGA中,通过编码之后回送给综合接口与控制模块。或者在接收到自检模式信息后,根据模式要求,在控制16个T/ R组件完成布相的同时,波控系统将本单元的波控代码、衰减码等数据通过422串口送给综合接口与控制模块,完成分系统自检。
如果收到收发切换指令波控单元便根据状态控制字产生收发切换时序信号,控制T/R组件的收发开关,同时产生相应状态电平控制两路射频输入通道的选通(二选一),以及两路输出通道的选通(二选一),完成收发转换。
6 结束语
在实践过程中证明,使用本波束控制系统的机载通信设备具有工作方式灵活多样、波束跟踪高速实时、可靠性高、功率低等优点,受到用户的好评。但如何降低T/R组件的成本,成为限制相控阵天线使用的主要议题。
[1]陈之涛.相控阵雷达高速布相的设计与实现[J].雷达科学与技术,2003,1(3):153-155.
[2]张光义.相控阵雷达系统[M].北京:国防工业出版社,1994.
[3]康学海,等.“动中通”移动卫星通信终端天线跟踪技术[J].现代电子技术,2007(17).
TP393
A
1009-3044(2017)21-0027-02
2017-06-23
张羽(1978—),男,工程师,本科,主要研究方向为雷达任务电子系统、通信控制系统、波控系统;李琳(1978—),男,高级工程师,硕士,主要研究方向为雷达任务电子系统、综合电子系统;孙高俊(1977—),男,高级工程师,本科,主要研究方向为雷达任务电子系统、综合电子系统。
猜你喜欢
中国农业信息(2021年3期)2021-11-22
家庭影院技术(2021年3期)2021-05-21
铁道通信信号(2020年5期)2020-09-21
通信技术(2019年3期)2019-05-31
电子测试(2018年6期)2018-05-09
电子制作(2017年13期)2017-12-15
声学与电子工程(2017年1期)2017-06-22
电子制作(2016年15期)2017-01-15
铁道通信信号(2016年10期)2016-06-01
四川师范大学学报(自然科学版)(2015年4期)2015-02-28
