海天背景下舰船可见光图像目标区域定位方法⋆
2017-08-28 15:04杨晓东陈长青
火力与指挥控制 2017年7期
季 超,杨晓东,陈长青
(海军潜艇学院,山东 青岛 266199)
海天背景下舰船可见光图像目标区域定位方法⋆
季 超,杨晓东,陈长青
(海军潜艇学院,山东 青岛 266199)
针对行均值法用于海天背景下舰船目标区域定位可靠性不高、容易受到舰船目标大小和海天背景复杂程度影响的不足,提出一种基于图像行灰度熵的舰船目标区域定位方法。该方法在分析海天背景下舰船目标可见光图像成像特点基础上,结合信息熵理论给出了图像灰度熵及行灰度熵的概念,利用图像行灰度熵描述图像在行方向上的灰度变化程度,选用滑动区间方差搜索策略得到图像行灰度熵曲线的突变区间,从而实现舰船目标区域定位,最后通过实际图像进行了实验验证。实验结果表明,该方法能对舰船目标所在区域有效定位,其准确性及鲁棒性均优于行均值法。
舰船定位,行灰度熵,海天背景,可见光图像
0 引言
海上舰船目标识别是通过对获取的海天背景下舰船目标图像进行图像分割及特征提取进而采用某种分类方法完成目标类型识别。在远距离情况下,舰船目标在图像中所占比例较小,为了抑制舰船目标区域外噪声及干扰物的影响,同时为了减小后续图像分割的计算量,识别前首要工作便是对舰船目标区域准确定位。
针对舰船目标大多出现在海天线附近的实际,当前基于海天线检测的红外舰船目标定位方法被广泛深入研究,见文献[1-7],而可见光图像研究较少。本文提出一种基于图像行灰度熵的舰船目标区域定位方法。舰船目标的出现使得海天背景下可见光图像舰船目标区域所在行方向上的灰度发生剧烈变动,从而改变了图像在此区域的行灰度熵,本文便是通过计算图像行灰度熵并采取搜索行灰度熵的突变区间实现舰船目标区域有效定位。
1 海天背景下舰船目标可见光图像成像特点
海天背景下舰船目标可见光图像从上往下依次是天空、海天线区域、海面3部分,另有位于海天线区域附近的舰船目标。图1给出了海天背景下舰船目标可见光图像的灰度图,图2为其对应的图像灰度三维曲面。通过分析图1和图2可知海天背景下舰船目标可见光图像成像具有如下特点:

图1 舰船灰度图像

图2 图像灰度三维曲面
(1)图像背景由天空背景和海面背景组成;
(2)天空背景除少量云层影响,一般情况下起伏较平缓;海面背景由于海浪运动、波浪反光等影响而表现出强烈不均匀性,海面杂波的存在使得海面背景起伏较为剧烈;
(3)天空反射较强、亮度较大,故天空背景部分灰度值一般高于海面背景灰度值;
(4)天空和海面间亮度存在明显跳跃,海天线附近灰度值介于天空背景和海面背景灰度值之间,且存在海天交接过渡带;
(5)舰船目标存在于海天背景中,一般位于海天线附近,且舰船目标的存在所使得此区域图像灰度发生剧烈变化。
文献[4]依据海天背景下图像灰度强度在海天线附近存在突变特征,采用搜索背景行均值曲线剧降区间定位海天线,进而确定舰船目标潜在区域。具体实现过程如下:
首先利用形态学开运算得到背景图像fb,其行数和列数分别为M,N,则其行均值数列R的定义为[4]:

其中,fb(i,j)表示背景灰度值,图3给出了图1对应的行均值灰度曲线。由图3可以看出:图像行均值曲线包含以下三部分:ab段处于高灰度级,灰度均匀下降且变化平缓,表示此区域为天空背景部分;bc段灰度呈现急剧下降,灰度存在突变区间,表示为海天线区域;cd段处于低灰度级,灰度起伏较大,表示为海面背景。文献[4]便是通过搜索突变区间bc段来确定海天线进而得到舰船目标潜在区域,但该方法存在以下不足:当所获取的图像中不含有舰船目标时,也会得到与图3相似的曲线。图4给出了不包含舰船目标的纯海天背景下图像,图5为其对应的行均值曲线图。图5曲线与图3所示曲线形状大致一样,故该方法只能得出海天线大致区域,并不能判断是否含有舰船目标。为此本文提出基于图像行灰度熵的舰船目标区域定位方法。

图3 行均值灰度曲线

图4 海天背景图像
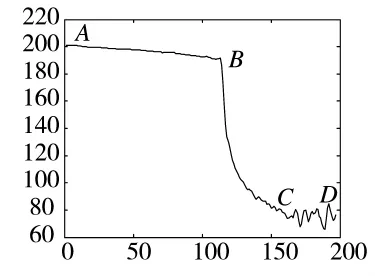
图5 海天背景行均值灰度曲线
2 基于图像行灰度熵的舰船目标区域定位算法
2.1 熵的基本概念
在热力学中,熵表述为热量与绝对温度变化的比。Shannon将熵引入信息论,在信息论中,熵是系统状态不确定性的度量,表示概率分布的不确定性,熵越大,信息不确定性越大,对应信息量越少;反之,则对应信息量越多[8]。
信息系统信息通过信道从信源传递至信宿。假定信息是信源从一个无穷可数或有限符号集中产生的一个随机序列,此符号集合被称为信源的符号集A,其中的每一个元素aj称为信源符号。信源产生符号aj的概率记作P(aj),显然存在

根据Shannon对信息熵的定义,单个信源符号的自信息为。若信源产生了由k个符号组成的一条信息,其中符号aj按概率将出现kP(aj)次。若将信源产生的平均信息(亦称自信息)记为H(u),则有下式成立

H(u)表示信源输出符号的不确定性,称为信源的熵。如果信源产生各个符号的概率相等,则信源的熵取最大值。
2.2 图像灰度熵及行灰度熵
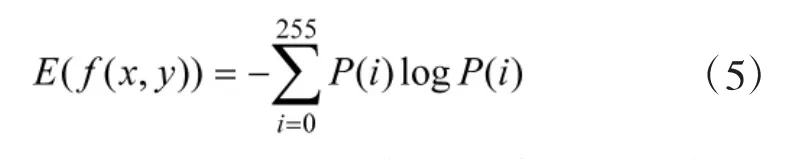
设f(x,y)为大小M×N的二维数字图像,灰度级范围i∈[0,255],假设图像中灰度值为i的像素个数为ki,则图像中灰度值为i的像素出现的概率P(i)为
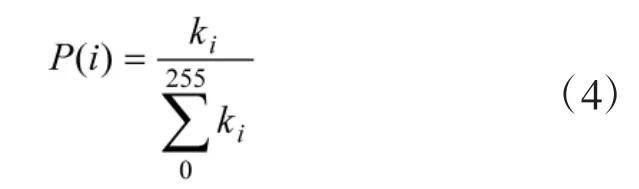
则该图像的灰度熵通常定义为[8-9]
式(5)定义的熵表征了图像一维直方图的灰度级分布信息,当灰度级分布均匀、等可能出现时熵最大。由于概率P(i)表征的是灰度级的出现概率与图像中像素点的分布及局部特性无关,故无法准确反映图像的稳定或清晰程度。
舰船目标出现使得获取图像灰度在行方向上发生变化,为描述这种变化,本文引入图像行灰度熵概念。对于一幅大小M×N的图像f(x,y)来说,在第j行上灰度级为灰度级范围i∈[0,L-1],则像素大小为i的出现概率仍采用式(4)计算,对每一行像素均用式(6)计算其行像素的灰度熵。行灰度熵E(fj(x,y))表征图像f(x,y)在第j行上灰度等级分布信息,当灰度级分布均匀、等可能出现时熵最大。

2.3 算法流程
将获取图像经过图像预处理,主要包括滤波及图像增强等算法,滤除图像包含的噪声及增强低能见度下的目标对比度,依据式(6)计算图像行灰度熵,通过滑动区间方差搜索策略得到行灰度熵的突变区间,确定舰船目标所在区域。该算法具体流程:
(1)图像灰度化及预处理。将获取的舰船目标图像灰度化,采用3×3中值滤波滤除噪声,并选用双向直方图均衡法进行图像增强。
(2)计算图像每行的各像素值出现概率P(i),依据图像行灰度熵式(6)计算得到图像行灰度熵。

图6 基于图像行灰度熵的舰船目标检测算法流程
(3)通过滑动区间方差搜索图像行灰度熵曲线的突变区间,定位舰船目标所在区域。变量的方差描述了集合内点相对其均值的离散程度,为此本文选用图像灰度熵的滑动区间方差来寻求突变区间。具体实施如下:假设图像f(i,j)为大小M×N的二维数字图像,则其行灰度熵为点集 E=(1,M),该集合含有M个点。依次计算滑动区间灰度熵方差,通过设定一定阈值δ得出方差突变区间(T1,T2),从而确定舰船目标区域。舰船桅杆以上所占像素较少,因而此部分对应区域的图像行灰度熵变化较小,且舰船桅杆与舰船下半主体高度相当,故本文在检测出突变区间(T1,T2)后,将突变区间上界右移突变区间大小T2-T1,则最终得到舰船目标所在区域为(2T1-T2,T2)。
3 实验过程及结果分析
本文选取实际拍摄的5张舰船可见光图像验证算法的有效性。其中舰船图像1为高能见度下拍摄图像;舰船图像2及图像3为天空含有较多云层下拍摄图像;舰船图像4为低对比度下拍摄图像;舰船图像5为雾天所拍摄的超低对比度图像。各图像舰船目标区域所处真实区间行坐标见下页表1所示。
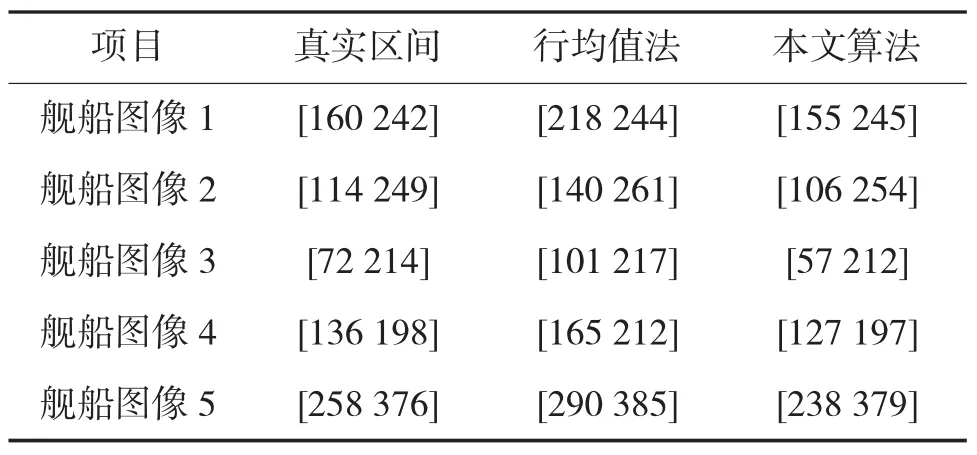
表1 计算结果
首先采用3×3中值滤波滤除噪声,并选用双向直方图均衡法进行图像增强。在图像经过预处理的基础上,分别采用文献[4]中行均值法及本文算法确定舰船目标区域,依据式(6)计算得到图像行灰度熵,并结合2.3节中的滑动区间方差搜索突变区间最终确定舰船目标区域,其中滑动区间大小取T=10。图7~图11分别给出了各舰船图像的原图、灰度图及其直方图、双向均衡化及其直方图、行均值灰度曲线、行灰度熵曲线及行灰度熵方差曲线。
以舰船图像1为例说明具体计算过程,采用行均值法定位舰船目标区域,则由图7中1d行均值灰度曲线可得出舰船目标所在区域为[218 244];由图7中1e行灰度熵曲线可看出,图像行灰度熵数值从195行至233行急剧上升,从244行图像行灰度熵急剧变小,故可得图像行灰度熵的突变空间为[195 244]行。由图7中1f滑动区间方差曲线,经阈值δ=0.05搜索后,计算得出突变区间为[200 245]行,故最终舰船目标所在区域为[155 245]行,其所在真实区间为[160 242],与行均值法相比,本文计算结果对舰船目标定位更为准确。舰船图像2~舰船图像5计算过程相同,这里不再赘述,其计算结果见表1。
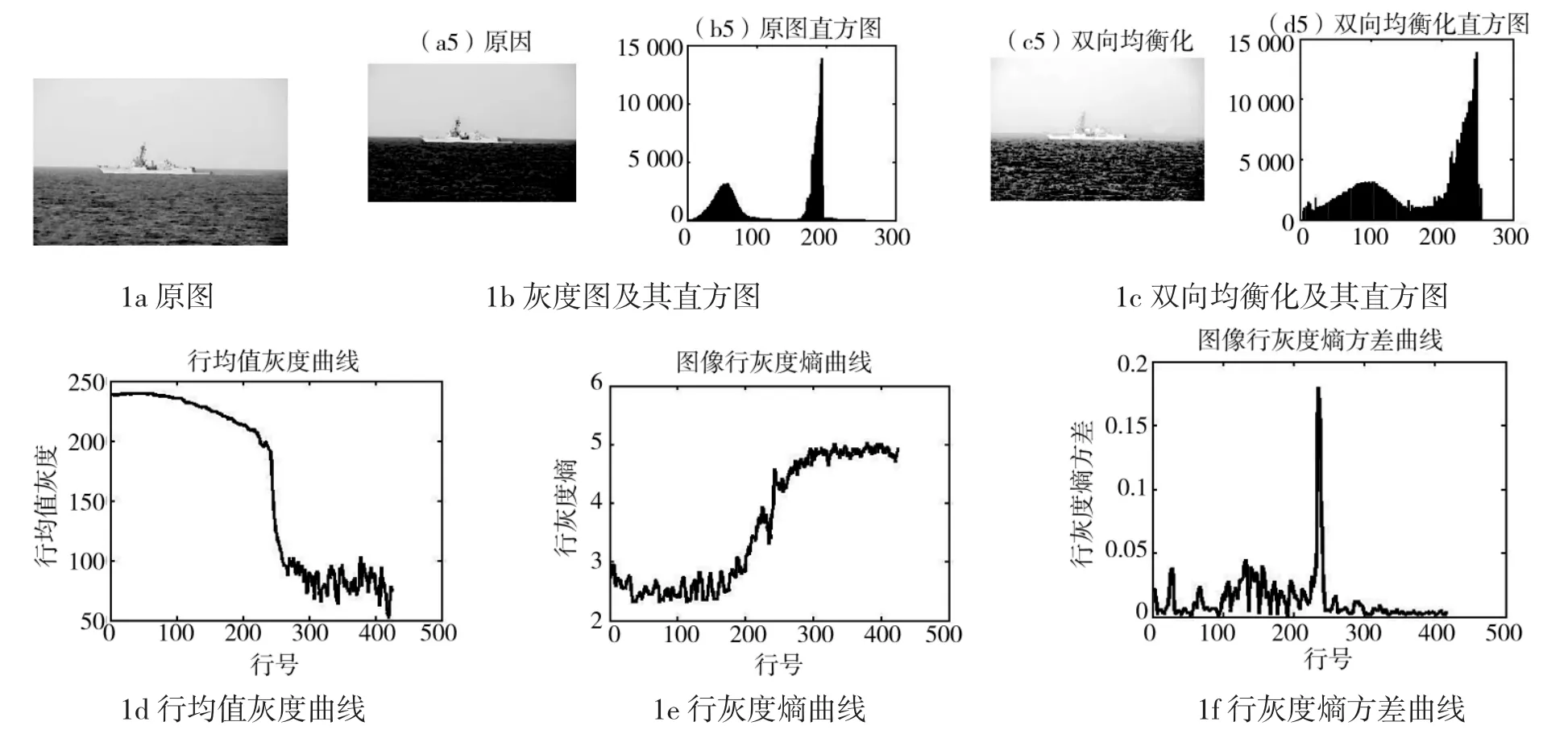
图7 舰船图像1
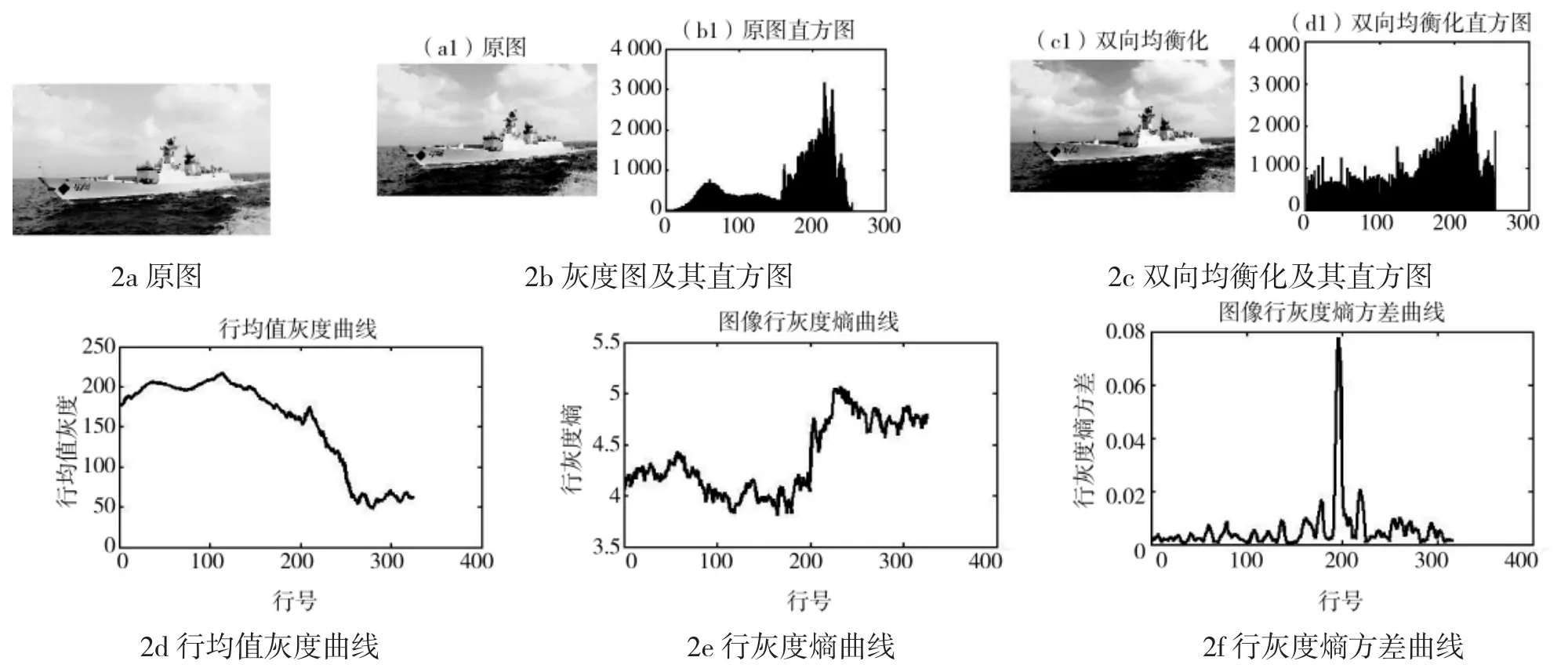
图8 舰船图像2
由表1数据可看出:本文计算结果能够包含舰船整体所在行区间,而行均值法计算所得舰船目标所在行区间不包含舰船目标上层建筑以上部分所在区间,故本文所提算法准确性更优;同时,对于天空含有较多云层图像、低对比度图像特别是超低对比度图像,行均值法区间上限比较难确定,区间定位误差变大,而本文所提算法均可有效定位,故本文算法鲁棒性优于行均值法。

图9 舰船图像3
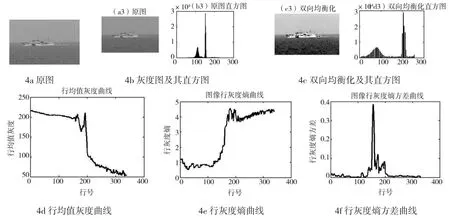
图10 舰船图像4
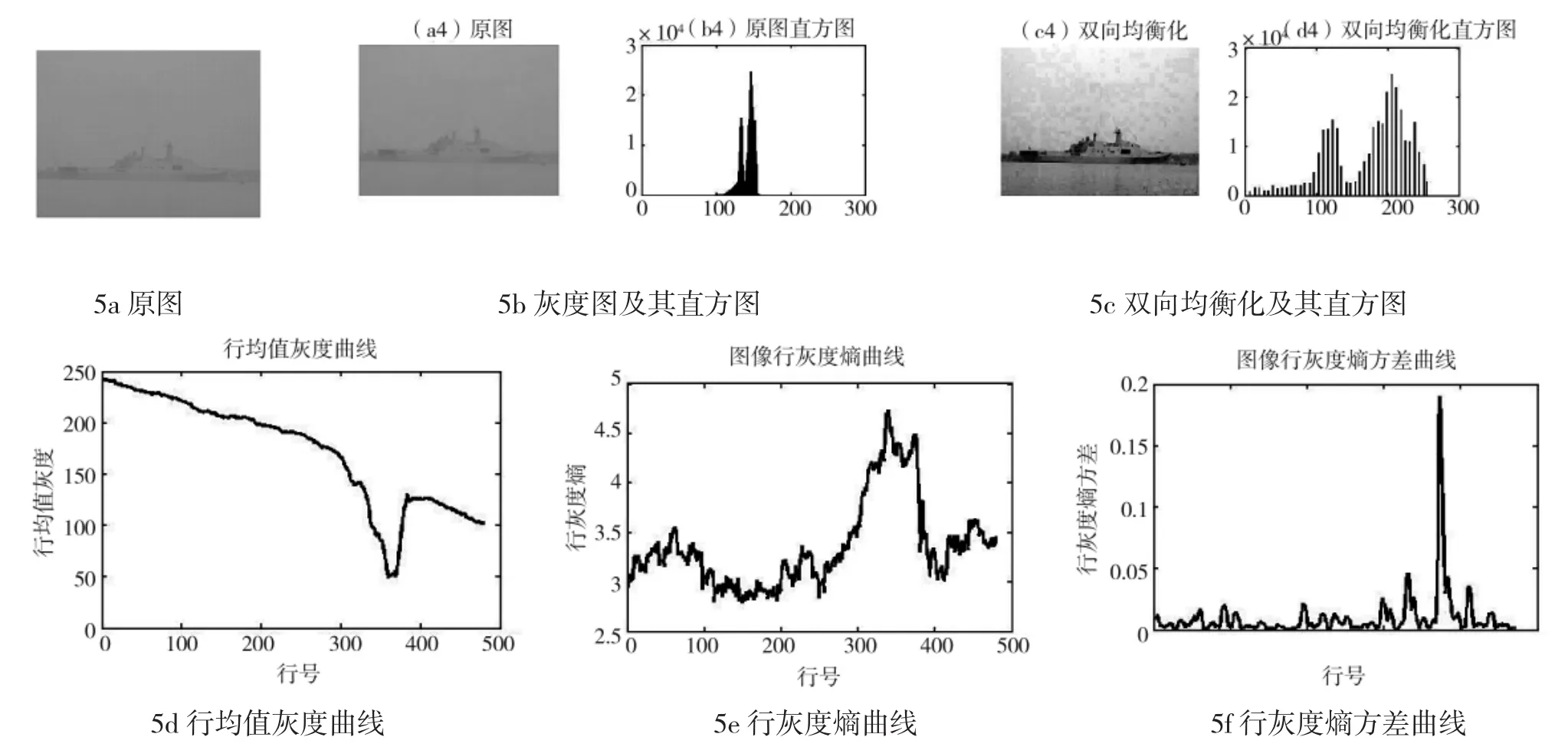
图11 舰船图像5
4 结论
为了确定海天背景下舰船可见光图像目标所在区域,本文提出了一种基于图像行灰度熵的舰船目标区域定位方法,该方法利用图像行灰度熵描述图像在行方向上的灰度变化程度,通过滑动区间方差搜索法定位舰船目标。算法实现过程简单、计算量小,能够摆脱海面杂波的影响,且不需要检测海天线。实验结果表明本文所提算法的准确性及鲁棒性均优于行均值法。
[1]董星宇,刘伟.基于灰度特性的海天背景小目标检测[J].中国光学与应用光学,2010,3(3):252-256.
[2]黄英东,范宁军,李杰.一种基于海天线检测的舰船定位方法[J].弹箭与制导学报,2008,28(5):286-288.
[3]张永亮,汪洋,卢焕章.基于图像灰度熵的团块目标检测方法[J].系统工程与电子技术,2008,30(2):201-204.
[4]杨家红,李翠红,危德益,等.基于复杂海空背景行均值曲线的海天线定位算法[J]. 激光与红外,2012,42(12):1346-1350.
[5]杨明月,杨卫平.复杂海天背景下红外舰船目标的自动检测方法[J].红外与激光工程,2008,37(4):638-641.
[6]繆德超.复杂海空背景下红外舰船小目标检测技术研究[D].哈尔滨:哈尔滨工程大学,2007.
[7]曾文静,万磊,张铁栋,等.复杂海空背景下弱小目标的快速自动检测[J].光学精密工程,2012,20(2)403-412.
[8]吴泽鹏,郭玲玲,朱明超.结合图像信息熵和特征点的图像配准方法 [J]. 红外与激光工程,2013,42(10):2846-2852.
[9]吴一全,纪守新,吴诗婳.基于二维直分与斜分灰度熵的图像阈值选取 [J]. 天津大学学报,2011,44(12):1043-1048.
[10]BARDERA A,BOADA I,FEIXAS M,et al.Image segmentation using excess entropy[J].Journal of Signal Processing Systems,2009,54(1/2/3):205-214.
[11]GUO S,PRIDMORE T,KONG Y,et al.An improved hough transform voting scheme utilizing surround suppression [J].Pattern Recognition Letters,2009,30:1241-1252.
[12]LIBE T,GERSHIKOV E,KOSOLAPOV S.Comparision of methods for horizon line detection in sea images[C]//The Fourth InternationalConference on Creative Content Technologies,2012:79-85.
Target Region Locating Algorithm for Ship Visual Image under Sea-sky Background
JI Chao,YANG Xiao-dong,CHEN Chang-qing
(Navy Submarine Academy,Qingdao 266199,China)
As for the row mean method has the disadvantages of low reliability for ship target location under sea-sky background,and easily influenced by the size of the ship target and complexity of sea-sky background,a new algorithm is proposed based on the line gray entropy for ship target region location.Based on the analysis of ship visual imaging characteristics under sea-sky background,the algorithm gives the concepts of image gray entropy and line gray entropy combined with information entropy theory.Using the line gray entropy to describe the degree of gray level change,variance of sliding interval is selected to search the sudden interval to determine the ship target region.Finally experimental verification is carried out by the actual image.Experimental results show that the algorithm can successfully locate the ship target region with higher accuracy and robustness than row mean method.
ship location,line gray entropy,sea-sky background,visual image
TP391.4
A
10.3969/j.issn.1002-0640.2017.07.015
1002-0640(2017)07-0066-06
2016-05-05
2016-06-28
海军预研基金资助项目(435515908)
季 超(1987- ),男,山东济宁人,博士研究生。研究方向:视觉导航、计算机视觉与图像目标识别。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
中国造纸(2022年8期)2022-11-24
中国设备工程(2022年13期)2022-07-11
北京航空航天大学学报(2022年6期)2022-07-02
香格里拉(2021年2期)2021-07-28
舰船科学技术(2021年12期)2021-03-29
天津医科大学学报(2021年1期)2021-01-26
书香两岸(2020年3期)2020-06-29
中国信息技术教育(2020年2期)2020-02-02
舰船科学技术(2016年1期)2016-02-27