舰艇编队防空能力仿真和可疑目标识别模型⋆
2017-08-28 15:04:34詹秀秀朱燕燕张子柯孙桂全
火力与指挥控制 2017年7期
周 楠,詹秀秀,朱燕燕,张子柯,孙桂全,3
(1.中北大学理学院,太原 030051;2.杭州师范大学阿里巴巴复杂科学研究中心,杭州 311121;3.山西大学复杂系统研究所,太原 030006)
舰艇编队防空能力仿真和可疑目标识别模型⋆
周 楠1,詹秀秀2,朱燕燕2,张子柯2,孙桂全1,3
(1.中北大学理学院,太原 030051;2.杭州师范大学阿里巴巴复杂科学研究中心,杭州 311121;3.山西大学复杂系统研究所,太原 030006)
由于舰艇的探测范围有限,为了最大限度地保证指挥舰的安全,需要设计合理的编队队形。对此设计了一种对称环形编队,分析了该编队在有预警机和无预警机两种情景下的抗饱和攻击能力。分析结果显示该队形能最大程度地保护指挥舰安全,抗饱和攻击能力显著增强。特别在有预警机支援的情况下,舰队生存能力可以得到极大提升。最后针对未知目标,使用决策树分类可以更迅速准确地判断出目标真实意图。
舰艇编队,抗饱和攻击,决策树分类,目标识别
0 引言
15世纪的地理大发现,使人类将目光从陆地投向海洋,欧洲各国的船队航行在开辟的新航路上,通过远洋贸易攫取了巨额利益,欧洲新生的资本主义由此得到发展[1]。1588年英国击溃西班牙无敌舰队,成为海上强国之一,并在之后的三次英荷战争中打败荷兰成为海上霸主,而特拉法尔加海战的胜利使得英国的霸主地位无可动摇,奠定了“日不落帝国”的基石[2]。1890年马汉发表《海权对历史的影响(1660-1783)》,首次提出并阐明了“海权(sea power)”的概念及其内涵,在之后半个世纪里深刻影响了美国的海军战略[3]。
中国自古就是陆权国家,20世纪80年代以来随着改革开放的发展突破了重陆轻海的传统思想,海上经济活动对国家发展日益重要,这就要求应有强大海军的支持。现代化海战的作战手段更加先进,信息流通更密集迅速[4],海上作战即为舰艇编队的联合对抗,这需要各舰艇在服从指挥舰统一调度的基础上充分配合,所以针对不同需要编制合适的队形可以极大提升舰队的生存能力和作战能力。从更广泛的层面来说,现代战争的形态已由机械化向信息化发生着不可逆转的改变,而制信息权是信息化战争的制高点,所以未来战争成败的关键就在于军队的信息化程度[5]。
本文针对一个实际的战斗场景,编制了舰队的最优防空队形,并对这种队形的防空能力进行了分析。为了在实际战斗中充分利用防空火力,设计算法对未知的空中目标进行了识别,以打击真正的目标。
1 问题背景
1.1 舰队作战环境
一支由1艘导弹驱逐舰和4艘导弹护卫舰组成水面舰艇编队在我某开阔海域巡逻,其中导弹驱逐舰为指挥舰。在以正北方向为0°,顺时针20°至220°的范围内等可能的有反舰导弹来袭,速度为0.9 MHz。舰艇的最大探测范围是30 km,在20 km范围内一定会发现目标,而在20 km~30 km的范围以一定概率探测到目标。为了防止误伤,一艘舰艇发射的导弹不能进入其他舰艇10 km范围内。
舰队所用的防空导弹水平最小射程为10 km,最大射程为80 km,高度影响不考虑(因敌方导弹超低空来袭),平均速度2.4 MHz,在拦截来袭导弹时,从发现目标至防空导弹升空有7 s的准备时间。将由同一架或在一起的一批飞机几乎同时发射,攻击目标和导弹航向都相同的导弹称为一批,每批至多有4枚。一艘舰艇不能同时对两批导弹拦截,只有一次拦截完成才能进行下一次拦截。舰队仅依靠自身雷达对空中目标进行探测,但由于装备有数据链,所以编队中任一舰艇发现目标,其余舰只都可以共享信息,并由指挥舰统一指挥各舰进行防御。
1.2 符号说明
本文所使用符号如表1所示:

表1 符号说明
2 舰艇编队的构建
饱和攻击是指对目标实施攻击并达到击沉或重伤的最小武器密度数[6-7]。在不考虑使用电子干扰和近程火炮等拦截手段时,仅凭舰载防空导弹能拦截到的反舰导弹越多,舰队生存能力就越强[8-10]。
舰队由1艘导弹驱逐舰和4艘导弹护卫舰组成,驱逐舰为指挥舰。要使4艘护卫舰的编队队形能在最大程度上保卫指挥舰的安全,即在导弹可能来袭的200°的区域内,不管从哪个方向攻击,都至少有一艘护卫舰能侦测到并进行拦截。而要使得以护卫舰为中心20 km范围内来袭导弹一定可以被发现,则该舰的侦测范围与相邻护卫舰的侦测范围要相切,确保来袭导弹不会从两舰之间的盲区穿过。所以相邻护卫舰之间的探测范围应该相切,而且也要与20°和220°两条边相切。
然而,导弹是从200°的扇形范围等可能攻击,所以如果某搜护卫舰距离指挥舰近而其他护卫舰距离远的话,导弹就可能从该方向接近并袭击指挥舰。所以同时规定4艘护卫舰距指挥舰的距离相等,这样的对称式的编队方式能够更早发现并拦截来袭导弹。
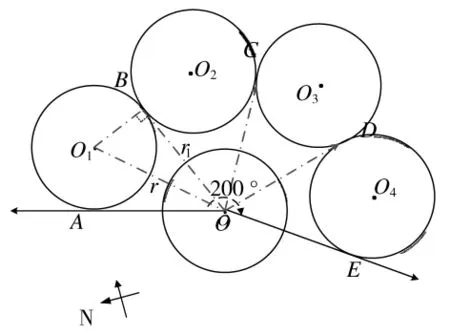
图1 对称相切编队队形
图1队形4艘护卫舰对称编制于指挥舰周围,且各个边界相切时,由对称性有,,可以得到式(1)

由图1可知,此时A~E点突然袭击指挥舰的导弹被发现的最晚。这几个点离指挥舰的距离均为r1,r1的值越大,最危险的地方离指挥舰的距离越远。护卫舰的探测范围相切能保证各个方向的反舰导弹都能被探测到,但要使得舰队在危险方向能尽可能早地发现目标,改进队形使得4艘护卫舰编制于指挥舰O周围,令4艘舰艇探测范围重叠(如图2),与式(1)相同,此时仍然有

其中




图2 最优队形
综上所述最优编队队形如图2所示,当指挥舰处于原点时,4艘护卫舰距离指挥舰均为42.8901km,第一艘舰在指挥舰正北顺时针45°处,第二艘在指挥舰正北顺时针转95°处,第三艘在指挥舰正北顺时针转145°处,第四艘在指挥舰正北顺时针转195°处。
3 编队抗饱和攻击能力计算
预警机是集预警、指挥、控制、通信等作用于一体的多功能机种。随着数据链的不断完善发展,预警机逐渐成为数据和信息服务的核心枢纽。在不考虑电子干扰和近程火炮时,本节分别分析在无预警机和有预警机支援时,舰队在防守最薄弱的方向上的抗饱和攻击能力[12-16]。
3.1 无预警机支援下抗饱和攻击能力仿真计算
由于5艘舰艇的位置对称,可知:

由于A、E两个点只能被一艘舰艇探测,且其他舰艇发射导弹拦截时需要的时间较长,因此,判断防守最薄弱的方向为射线OA、OE方向。
假设多批导弹沿着AO方向几乎同时攻击指挥舰,以O点为原点,AO方向为横轴,垂直于该方向为纵轴可以计算出图2中每艘舰和舰艇探测方位相交的位置的坐标,如表2所示。
3.1.1 拦截导弹的最小批次
计算在最优编队下,每个舰艇的探测范围为20 km时的每艘舰艇能拦截的导弹批次,此时得到的抗饱和攻击能力为其最小值。图3假设导弹在A点被探测到,O1发射防空导弹的准备时间为7 s,此时导弹前进到A1位置,O1开始发射导弹,假设在A2处防空导弹与导弹相遇,设 A2=(x,0),因此,由防空导弹从O1到达A2的时间等于导弹从A1到A2的时间即可算出A2的坐标。
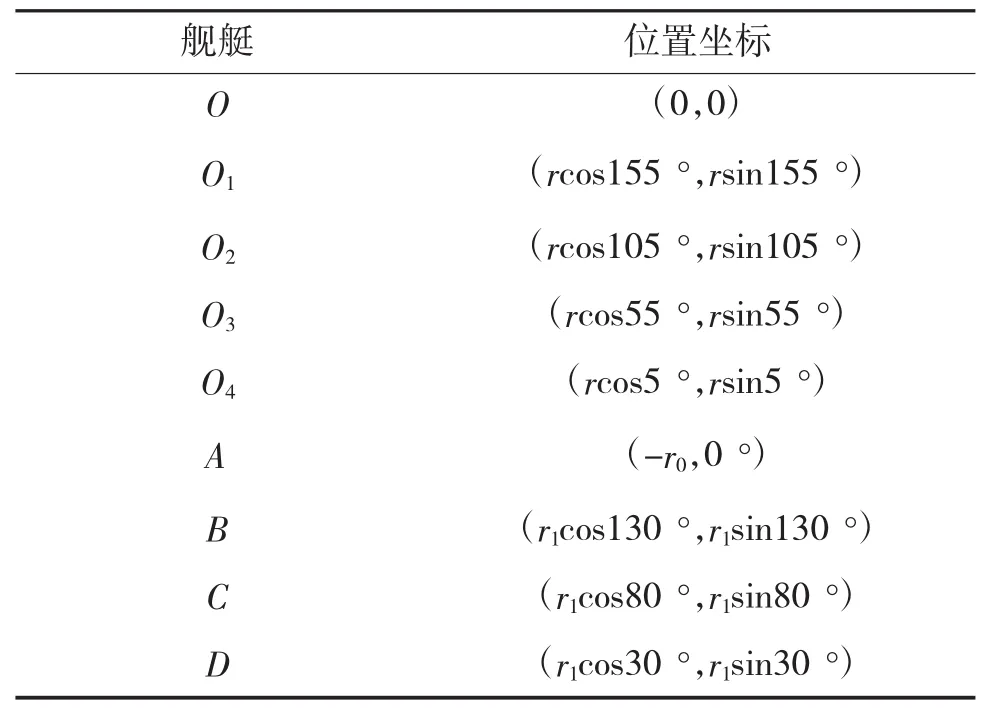
表2 各舰艇及切点坐标

图3 来袭导弹在A点被探测到时,舰艇O1第1次拦截示意图
然后以A2为下一个导弹被探测的位置,重复上述方法,得到下一个导弹被拦截的位置。重复计算k次,直到k+1次导弹与防空导弹的相遇位置落在以O为圆心,10 km为半径的圆中为止。此时得到该舰艇可以拦截k批导弹,值得注意的是,每一次舰艇发射防空导弹的路线都不能落入任何一个舰艇的10 km范围的圆域内。如图3所示要保证O1发射的防空导弹的轨迹O1A2>10 km,O2O3O4到O1A2的距离要大于10 km,并且OA2>10 km。依据这种计算方法,可以得到每艘舰能拦截的所有批次的导弹的拦截位置坐标,如表3所示:

表3 探测范围20 km各舰艇拦截导弹的位置坐标
表3中O4舰没有拦截到任何导弹。这是由于O4的拦截路线不能进入舰艇O的10 km范围内,取O4与圆O(半径10 km)相切时的位置点M,计算得到M点的坐标为(-67.79,0),而能探测到导弹的位置,处于M的右侧,所以O4无法发射导弹拦截。

图4 O4拦截路线
综上所述,当探测范围为20 km时,舰艇能够拦截的导弹总数为8批。
3.1.2 拦截导弹的最大批次
保持最优队形不变,当探测范围设为最大值30 km时有:

与3.1.1的方法类似,计算出各个舰艇可拦截的所有批次导弹的拦截位置,如表4所示:

表4 探测范围30 km各舰艇拦截导弹的位置坐标
由表4可知,此时O4舰也无法拦截导弹,原因和上节类似。因此,当探测半径为30 km时,可以拦截11批导弹,即抗饱和攻击能力为11批导弹。
所以在不考虑使用电子干扰和近程火炮等拦截手段,无预警机支援时,仅使用防空导弹拦截来袭导弹,本文的编队可以拦截来袭导弹对指挥舰攻击时的抗饱和攻击能力为8批~11批导弹。
3.2 基于预警机支援下抗饱和攻击能力仿真
在有预警机支援时,此时探测范围为以指挥舰为中心的200 km的区域,而导弹的最大射程只有80 km,所以4艘舰的导弹射程完全包含在预警机的探测范围之内,只要来袭导弹进入舰艇发射的防空导弹射程内就可拦截。以O1舰为例,从AO方向进入的来袭导弹可以在预警机的帮助下使得防空导弹在最大射程处完成第1次拦截,而后重新准备并发射,进行第2次拦截。与上节方法相同,可以得到每个拦截位置的坐标,表5给出了各舰可拦截到来袭导弹的位置。
在有预警机提供支援的情况下,沿最危险方向的抗饱和攻击能力为17批,所以在有预警情况下比无预警时提高了54.5%~112.5%。
4 可疑空中目标意图识别
4.1 决策树简介
在实际战斗中,舰载防空导弹的数量有限而雷达探测到的目标很多,所以判定这些目标的真实意图,以决定哪些目标对舰队有威胁是很重要的。对这样的问题,一种广泛应用的方法是决策树算法[17]。决策树是一种分类算法,它由决策结点、分支和叶子组成。决策树中最上面的结点为根结点,每个分支是一个新的叶子。每个决策结点代表一个问题或决策,通常对应于待分类对象的属性。每一个叶子结点代表一种可能的分类结果。沿决策树从上到下遍历的过程中,在每个结点都会遇到一个测试,对每个结点上问题的不同的测试输出导致不同的分支,最后会到达一个叶子结点,这个过程就是利用决策树进行分类的过程,利用若干个变量来判断所属的类别。一般常用的决策树学习有 ID3 和 C4.5[18]。
4.2 意图识别

表5 有预警机支援时各舰艇拦截导弹的位置坐标
为了识别出各个目标的具体意图,计算了目标在各个时刻的瞬时速度,方位角,与指挥舰的距离以及航向角,发现在这段时间内各目标的速度近乎不变(最大变化为1,单位m/s),且其方位角与航向角在检测中也几乎不变,因此,假设所有目标在水平方向呈匀速直线运动,除了id为41 006 842,41 006 851的目标高度发生骤降外,其余目标高度保持不变。因此,在利用决策树学习进行分类时,对待分类的数据选取其最后一个时刻的状态进行分类,利用机器学习中的决策树方法进行预测[19-20],表6是最后的分类结果。
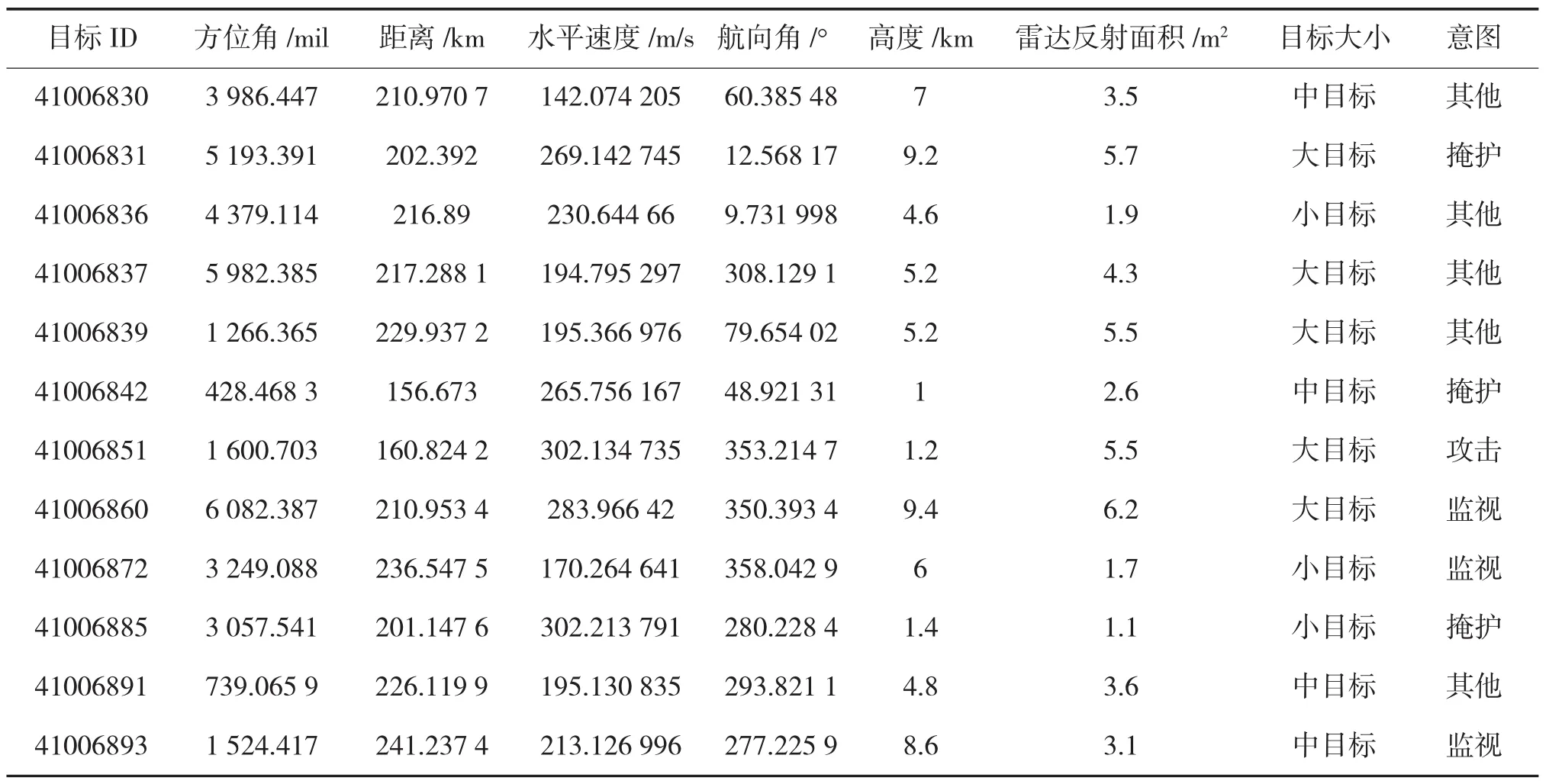
表6 可疑目标识别结果
5 结论
现代战争中制海权的重要性无与伦比,它关乎最终胜利的归属。本文针对一个实际的战斗场景编制了一种最优的防空队形,能够在所有方向上尽可能早地探测到来袭导弹,尽可能好地保护指挥舰不被导弹袭击,提高了舰队的生存能力。同时对雷达发现的诸多目标,使用决策树算法识别目标意图,以此打击真正对舰队有威胁的目标。
[1]LAMBERT A.风帆时代的海上战争[M].上海:上海人民出版社,2005:51-70.
[2]HILL R.铁甲舰时代的海上战争[M].上海:上海人民出版社,2005:89-112.
[3]张炜,冯梁.国家海上安全[M].北京:海潮出版社,2008.
[4]杨震,赵娟,卞宏信.论海权与航空母舰时代的中国海军建设[J].世界地理研究,2013,22(4):42-53.
[5]赵晓哲,王永春,许迟.舰艇编队协同防空武器组织的研究现状与展望[J].火力与指挥控制,2016,41(1):1-6.
[6]颜如祥,杨新民,刘赟.饱和攻击战术及支撑模型[J].指挥信息系统与技术,2014,5(5):35-38.
[7]谭乐祖,杨明军,王威.舰空导弹抗饱和攻击能力影响因素仿真分析[J].弹箭与制导学报,2010,30(6):49-51.
[8]张金春,张书宇,徐海峰,等.反舰导弹饱和攻击数计算模型研究[J].战术导弹技术,2013(4):21-25.
[9]姜鲁东,孙建华,余家祥.舰艇护航编队防空队形配置方法研究[J].舰船电子工程,2014,34(2):19-21.
[10]尹成义,谭安胜,朱青松.舰载无人机对敌编队实施电子干扰最优空间配置 [J].火力与指挥控制,2015,40(12):70-73.
[11]姜启源.数学建模[M].北京:高等教育出版社,2003.
[12]谢宇鹏,王宗杰,杨士锋,等.舰艇编队抗导弹饱和攻击模型[J].火力与指挥控制,2014,39(3):23-26.
[13]曾家有,王国卫,钟建林,等.多平台舰舰导弹饱和攻击几个协同问题与模型[J].兵工学报,2014,35(2):256-261.
[14]李大鹏,杨根源,谭乐祖.预警机支援下舰艇编队网络化协同反导研究[J].现代防御技术,2013,41(1):9-14.
[15]张艳霞,张安,孙海洋.预警机指挥引导编队协同对海作战系统建模与仿真[J].系统工程与电子技术,2016,38(1):90-95.
[16]纪军,马培蓓,孙国磊.航母防空作战中预警机巡逻区域方位配置研究[J].计算机仿真,2014,31(6):78-82.
[17]HARRINGTON P.机器学习实战 [M].北京:人民邮电出版社,2013:33-50.
[18]李航.统计学习方法[M].北京:清华大学出版社,2012:40-75.
[19]周志华.机器学习[M].北京:清华大学出版社,2016.
[20]MITCHELL T M.机器学习 [M].北京:机械工业出版社,2003:38-56.
[21]卞泓斐,杨根源,陈榕.舰艇编队网络化防空体系中节点重要度评估[J].四川兵工学报,2015,36(8):15-19.
Modeling of Fleet Air Defense Simulation and an Model for Suspicious Object Identification
ZHOU Nan1,ZHAN Xiu-xiu2,ZHU Yan-yan2,ZHANG Zi-ke2,SUN Gui-quan1,3
(1.School of Science,North University of China,Taiyuan 030051,China;2.Alibaba Research Center for Complexity Sciences,Hangzhou Normal University,Hangzhou 311121,China;3.Complex Sciences Center,Shanxi University,Taiyuan 030006,China)
In order to protect the command ship best in the limit of detection range of warships,designing an appropriate formation for the warships is necessary.Consequently,a symmetric annular warship formation is proposed firstly,anti-saturation attack capacity of the formation with AWACS and without AWACS is simulated and analyzed.The simulation results indicated this warship formation can protect command ship at the extreme,and improve on anti-saturation attack capacity observably.Fleet Viability significantly improves when AWACS supports fleet.Finally,decision-tree classify can quickly and precisely identify real intension of the suspicious targets.
warship formation,anti-saturation-attack,decision-tree classify,object identification
E837;TJ412.+7
A
10.3969/j.issn.1002-0640.2017.07.009
1002-0640(2017)07-0039-05
2016-06-20
2016-07-18
国家自然科学基金资助项目(11305043,11301490)
周 楠(1992- ),男,陕西富平人,硕士研究生。研究方向:机器学习。
猜你喜欢
军事文摘(2023年23期)2023-12-17 09:59:08
科学大众(2023年5期)2023-04-06 06:05:40
科学大众(2022年23期)2023-01-30 07:03:48
汽车观察(2022年12期)2023-01-17 02:21:24
小哥白尼(军事科学)(2021年5期)2021-08-30 06:46:12
科学导报·学术(2020年26期)2020-10-21 11:18:54
作文大王·低年级(2019年6期)2019-08-01 01:44:02
西北工业大学学报(2015年1期)2016-01-19 03:29:50
舰船科学技术(2013年12期)2013-08-15 00:51:50
航空知识(2001年10期)2001-10-28 18:52:26