
基于ARM和CAN的液压混合动力汽车能量管理系统*
2017-08-17 02:58蒋鸣雷李世刚
汽车工程师 2017年1期
蒋鸣雷 李世刚
(1.北京信息职业技术学院;2.北京联合大学)
随着社会的发展,汽车节能与环保已经成为汽车工业发展的一个重要要求。液压混合动力汽车利用能量再生技术,在降低汽车尾气排放污染和节能方面具有巨大的优势。目前,国内针对液压混合动力汽车能量管理系统设计的相关研究较少,有限的研究中控制器仅采用普通51单片机,通信基本采用带宽较窄的LIN总线系统,无法满足汽车的实时动力匹配运算和通讯安全的要求。而ARM具有运算速度快和可靠性高的优点;CAN总线具有实时性高、检错和纠错机制强、连接简单及可扩展性强等特点,两者十分适合液压混合动力汽车复杂的动力匹配和车载网络安全的要求。液压混合动力汽车驱动系统需要解决的关键技术是变量泵和发动机2个动力源的动力耦合及系统的能量管理问题,因此,文章基于ARM与CAN总线技术对其能量管理系统进行了设计,以解决复杂的动力匹配和汽车的运行安全。
1 液压混合动力汽车能量管理系统的组成
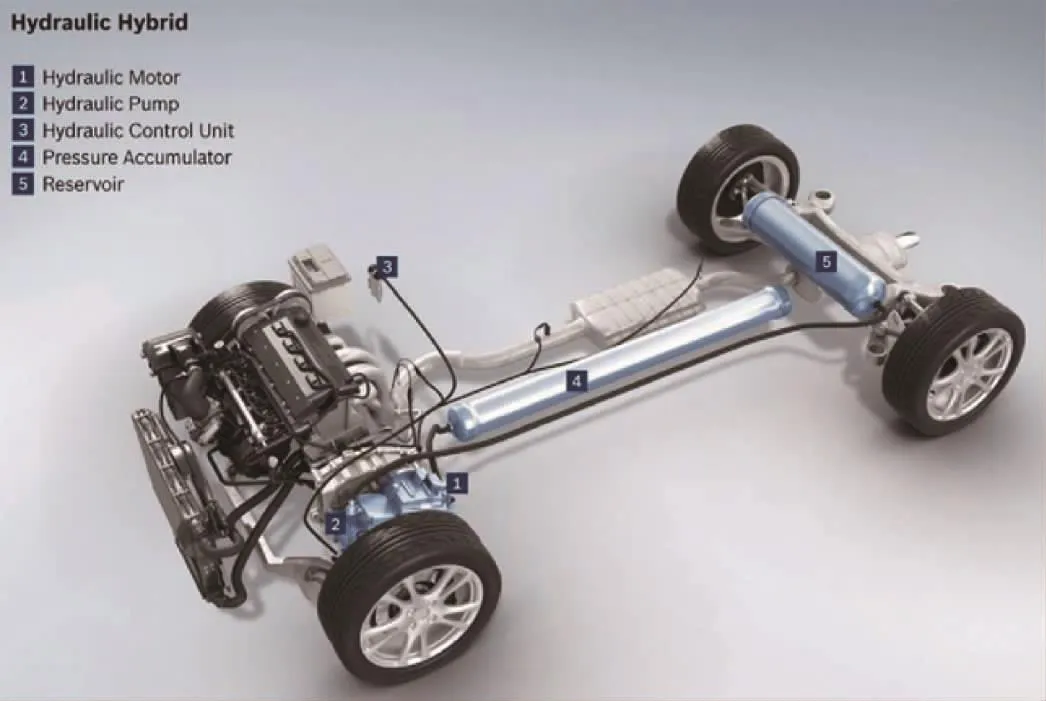
液压混合动力汽车的驱动系统包括发动机、液压辅助驱动单元(变量泵/马达、蓄能器及电磁阀等)及汽车原有传动系等几部分。由于液压混合动力汽车具有变量泵和发动机2个动力源,为了保证复杂的动力耦合与匹配及车载网络的安全运行,建立一个高效且安全的能量管理系统就显得尤为重要。
液压混合动力汽车的能量管理系统是基于ARM与CAN技术进行设计的[1-2],图1示出液压混合动力汽车能量管理系统组成结构图。系统采用主从分布式由上位机与各节点通过CAN总线进行联系,保证通讯的可靠性。上位机采用的ARM控制器具有体积较小,运算功能强大的特点,能够对系统实现高层次的优化控制与管理,以达到最佳的能源匹配[3-4]。
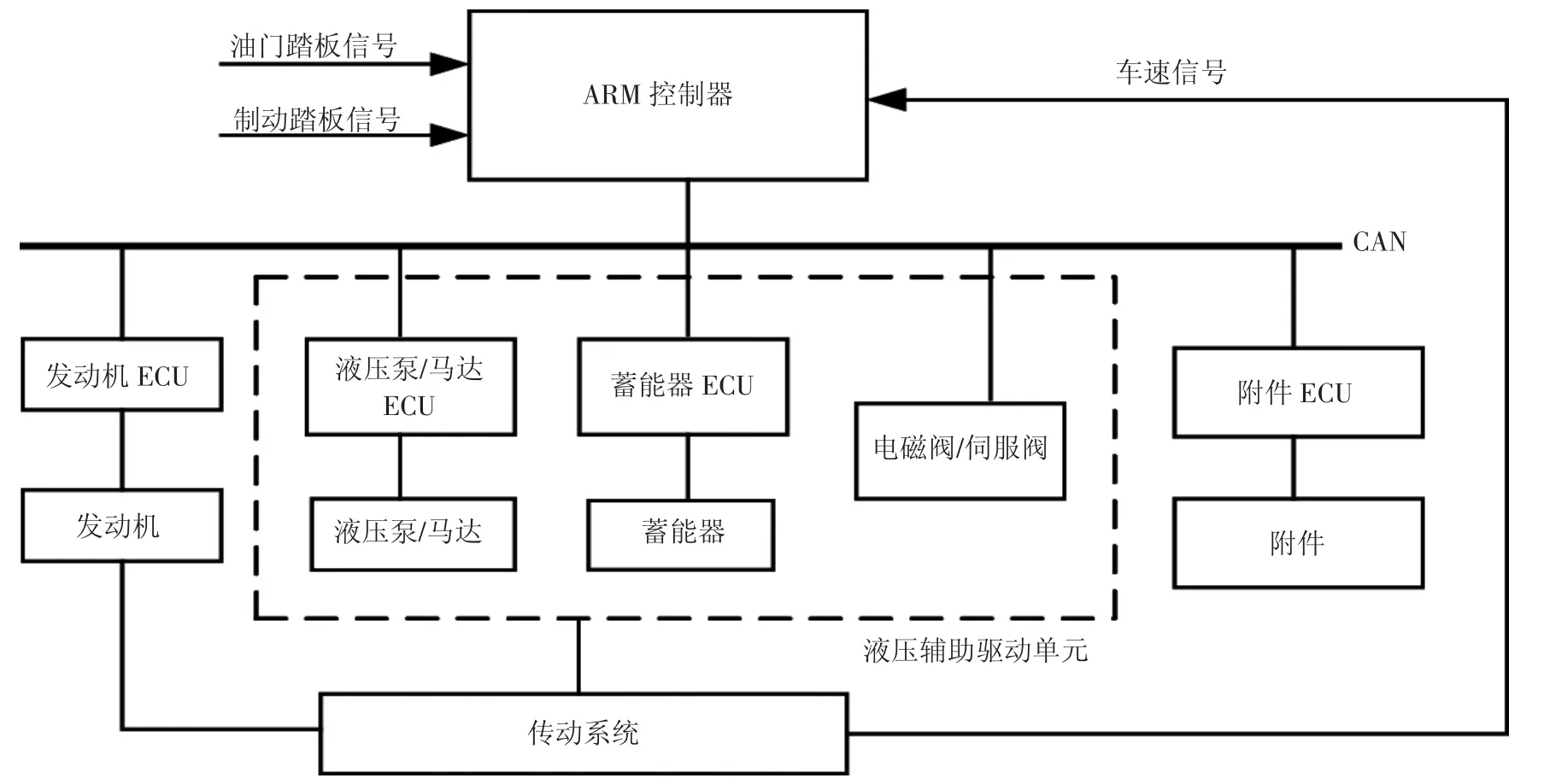
图1 液压混合动力汽车能量管理系统组成结构图
2 能量管理系统的工作过程
能量管理系统主要是管理和协调整车的运行过程,以期达到能源消耗最少,汽车运行高效的目的,其主要的工作过程如下。
1)当汽车起步或爬坡时,系统监测发动机的转速,并启动液压辅助驱动单元,辅助汽车运行,使发动机在较短时间内运行在最佳速度和燃油消耗区间内,以减少燃油的消耗;
2)系统采集油门和制动踏板信号,监控离合器和变速箱系统工作的挡位状态,进而估算汽车行驶需求功率;
3)系统通过控制策略的决策和运算,对行驶功率进行合理的分配,使发动机处于最佳的工作状态,达到节能和减少有害物排放的目的。
3 能量管理系统的软硬件设计
3.1 硬件设计
能量管理系统的主控制器为某公司的ARM芯片(LPC2294),它是一款基于16/32位ARM7TDMless,既可以执行32位的ARM指令,也可以执行16位Thumb指令,支持实时仿真和跟踪的CPU。LPC2294内部有16 kB的静态RAM和256 kB的FlashROM,有高速接口(400 kbps/s),8路 10位 A/D转换器,2个 32位定时器(4路捕获和4路比较通道),晶振频率范围为1~30 MHz,通过芯片内PLL可以实现最大60 MHz的CPU操作频率。它集成有4路芯片上CAN总线控制器,能很方便地实现多路CAN总线接口,减小系统规模,提高系统稳定性。CAN总线接口电路由LPC2294内置CAN控制器1的引脚RD1和TD1,并通过总线收发器TJA1050与CAN总线物理连接。选用的TJA1050芯片,能高速收发传感器及控制器信号(最高可达1 Mbps),在系统运行时对总线的引脚提供瞬态保护[5],保证了系统的正常工作。液压混合动力汽车能量管理系统硬件电路图,如图2所示。
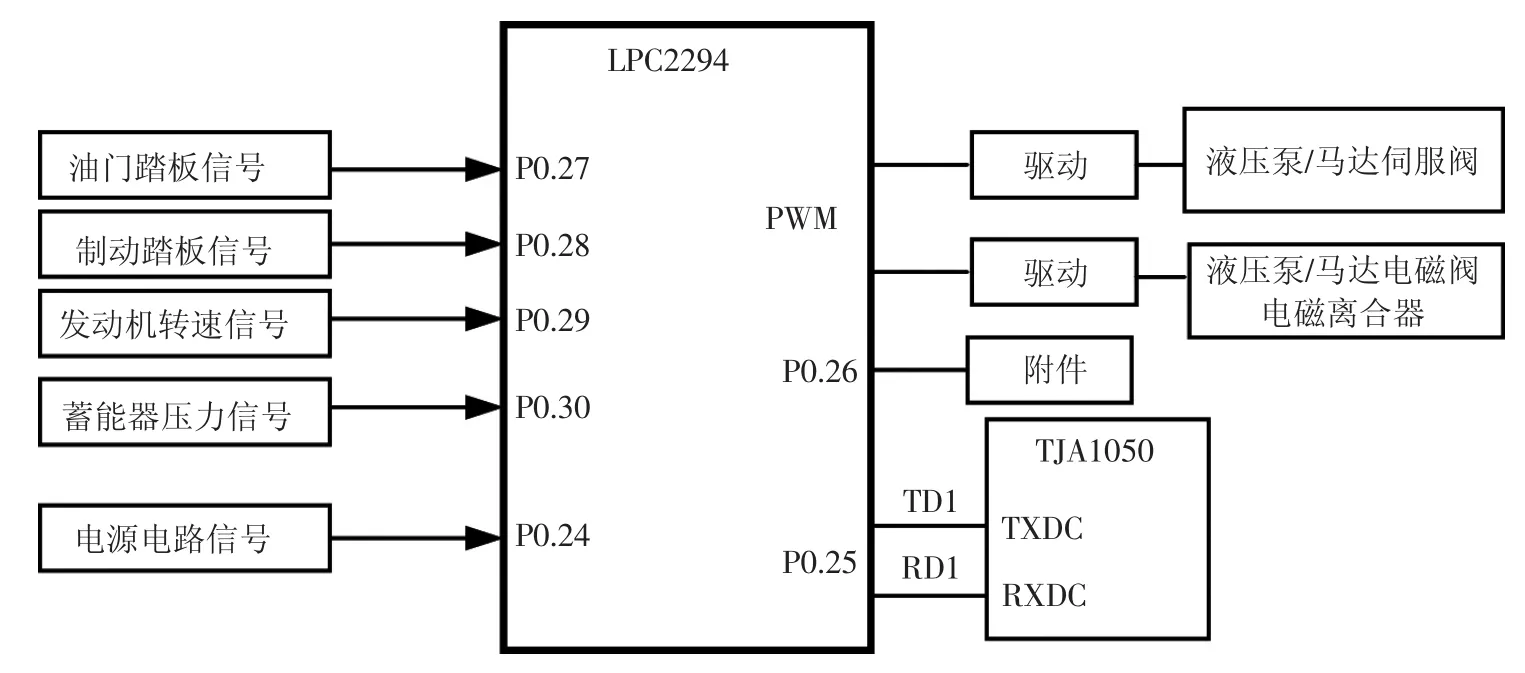
图2 液压混合动力汽车能量管理系统硬件电路图
变量泵/马达的排量信号和转速信号的采集是系统工作的重要前提,关系到能量管理系统能量管理的高效性,同时也关系到液压辅助驱动单元与发动机的动力耦合的精准性和可靠性。因此,在本能量管理系统中变量泵/马达排量和转速信号通过外围集成电路TLC1543传递给P89C54UFPN控制器。液压混合动力汽车变量泵/发电机排量与转速传感器电路图,如图3所示。P89C54UFPN是一种内核采用先进的CMOS工艺的8位单片机,微控制器是80C51芯片,CPU时钟频率可达 33 MHz,片上带有 16 kB的 Flash,256 B的SARAM,可分别寻址程序存储器和数据存储器,各64kB空间,双DPTR寄存器,3个16位定时器,4个8位I/O口,全双工增强型UART,串行编程(ISP)。
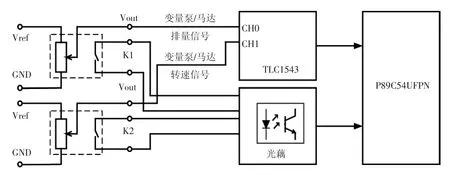
图3 液压混合动力汽车变量泵/马达排量与转速传感器电路图
在系统的CAN总线模块设计中,由于已选用的ARM控制器LPC2294内部集成有4路CAN控制器,完全符合CAN规范CAN2.0B标准和ISO11989—1标准要求。为了提高系统的可靠性,在ARM芯片CAN控制器和收发器之间加入6N137高速光电耦合器进行隔离,保证CAN总线上各CAN节点间的电气隔离。ARM的CAN总线接口处理电路,如图4所示。
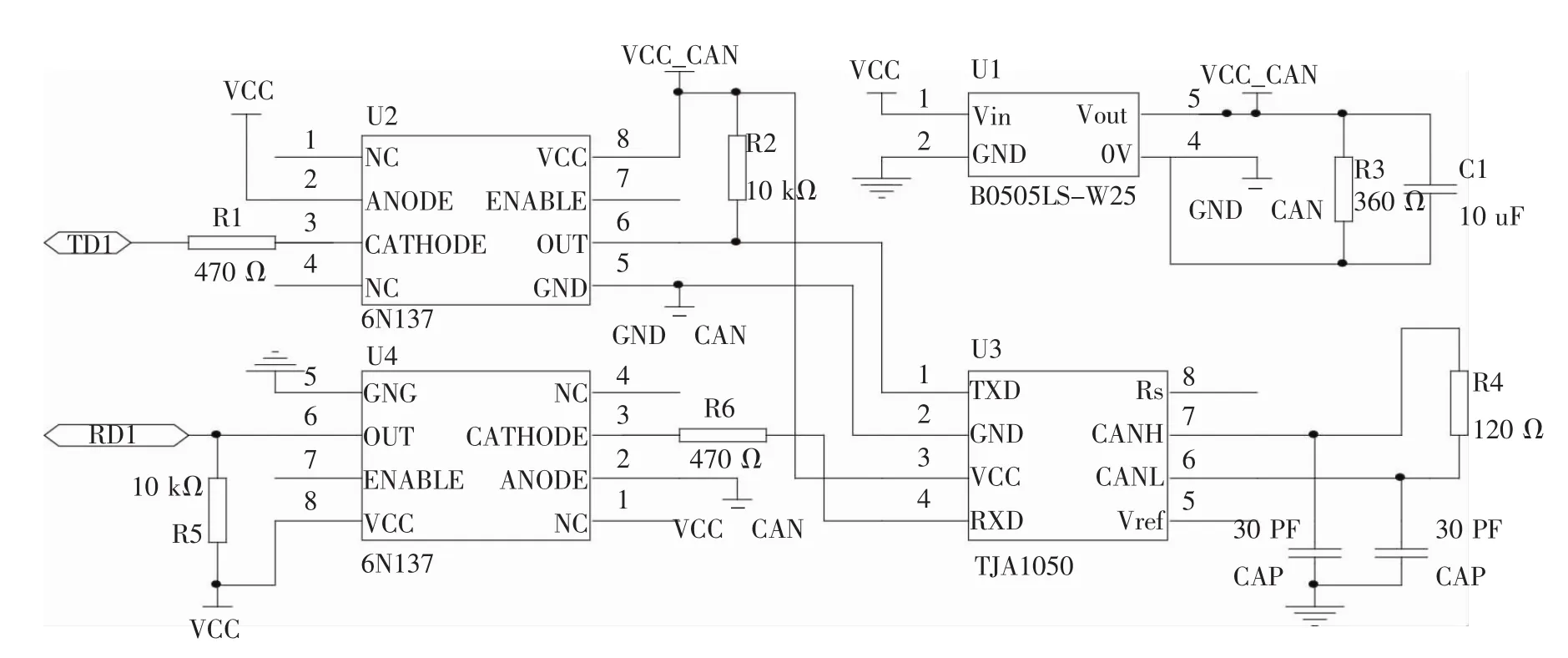
图4 ARM的CAN总线接口处理电路图
3.2 软件设计
软件部分主要由系统层、驱动层及应用层组成[6-7]。系统层设计首先是进行嵌入式操作系统内核的移植,然后对内核扩展形成一个简单且高效的操作系统;驱动层设计是在系统层上开发硬件驱动程序,它是实现应用层对硬件使用的接口;应用层设计是在操作系统的基础上进行任务设计,如数据采集与处理任务、通讯任务、显示任务及键盘扫描任务等的设计。能量管理系统实时监控汽车的运行状态、采集状态信息及控制汽车的运行模式。液压混合动力汽车能量管理系统运行主程序流程图,如图5所示。
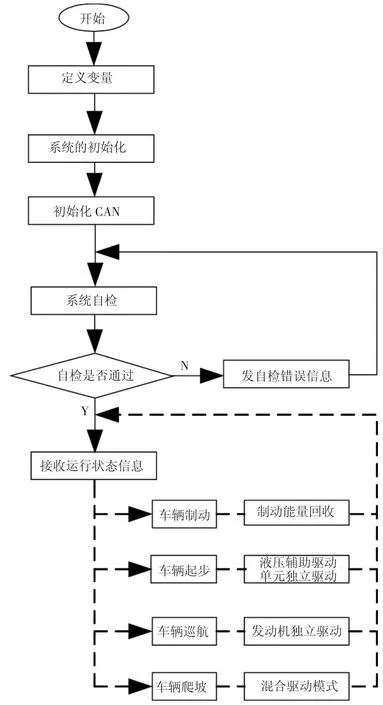
图5 液压混合动力汽车能量管理系统运行主程序流程图
CAN通信程序包括:初始化、报文的接收与处理及报文的发送。其中初始化子程序主要是对LPC2294内置的CAN控制器进行设置和接收缓冲区的初始化。当CAN模块完成初始化后,就可以实现对数据的发送与接收的请求。
4 结论
能量管理系统中的CAN总线通讯比特率设为80 kbps,通讯距离为20 m,数据更新周期为0.02 s,主要节点全部工作,汽车采用混合驱动模式进行实车试验,系统能够正常工作12 h;能量管理系统采用ARM控制器作为系统的主控制器,其强大的运算能力,能够迅速的对节点故障进行查询和处理,有效地解决了复杂的动力匹配和系统网络的运行安全问题,实时地保证了汽车的安全;并且能高效地监控汽车运行状态,协调驱动模式,有效地保证了汽车处于最佳的能源匹配,在起步、爬坡及加速阶段节油效果明显。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
中国交通信息化(2022年8期)2022-10-28
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年14期)2022-07-30
承德医学院学报(2022年2期)2022-05-23
科学家(2021年24期)2021-04-25
航天工业管理(2020年9期)2020-12-28
汽车零部件(2019年7期)2019-08-16
民用飞机设计与研究(2019年2期)2019-08-05
微型计算机(2009年12期)2009-12-21
