自主紧急制动系统测试方法
2017-08-17 02:58:34高继东张慧高博麟宋攀张倩
汽车工程师 2017年1期
高继东 张慧 高博麟 宋攀 张倩
(1.河北工业大学;2.中国汽车技术研究中心;3.河北科技大学)

交通事故研究表明,很多事故发生的主要原因是驾驶员的注意力不集中。为此,人们引入了前撞预警系统(FCW),这样可以在探测到车辆有发生碰撞危险时向驾驶员发出提前预警,给予驾驶员做出避撞动作的时间,如果驾驶员未对预警做出反应或制动反应不足,自动紧急制动系统(AEB)就会介入,以实现避撞或减小碰撞伤害。在Euro-NCAP(欧盟新车安全评鉴协会)和ANCAP(澳大利亚新车安全评鉴协会)于2015年5月联合发表的《现实世界追尾碰撞中AEB的有效性》研究报告中显示:AEB技术能在现实世界中减少38%的追尾碰撞,且无论是在城市道路(限速60 km/h)还是在郊区道路行驶的情况下,效果并无显著差别[1]。文章从AEB的工作原理出发,全面介绍了国内外场地测试的方法,以典型工况实车测试数据直观地展示了系统性能评价和分析的结果。
1 自动紧急制动系统(AEB)的工作原理
AEB作为一种主动安全技术,主要由环境感知模块、数据分析决策模块和执行机构模块组成,AEB系统的工作流程,如图1所示。

图1 自动紧急制动系统(AEB)工作原理流程图
环境感知模块获得车辆周边交通状况;数据分析决策模块根据传感器提供的数据计算出与前方车辆或行人发生碰撞的可能性,如果发现有发生碰撞的危险,系统会通过声音、图像或方向盘振动向驾驶员发出警告,并在危险等级提高到一定程度后进行干预——自动制动,以达到避撞或降速的目的。
当前,常见的环境感知模块包括摄像头、毫米波雷达、激光雷达以及多种传感器的融合。传感器采集到周边交通环境信息后会与车辆自身信息一起传递到ECU控制器内,计算安全距离,分析安全等级。不同的制造商和研究机构提出了众多的算法模型,可以归为以下3类:1)基于制动过程运动学分析的安全距离模型。该模型从制动过程的运动学分析出发,适用于跟随行驶过程中前方车辆突然制动的极端工况[2]。2)基于车间时距的安全距离模型。模型建立时考虑的主要因素是保证道路交通效率,适用于车辆以较低的相对速度跟随行驶的典型交通状况[3]。3)驾驶员预瞄安全距离模型。考虑驾驶员主观感觉因素,以驾驶员的实际驾驶行为为基础建立安全距离。该模型根据实际行车时驾驶员的操作特性,即驾驶员总是要对车辆之后一段时间的运行进行预测,以决定当前的操作这一特性,来进行安全距离的估计[4]。
2 国内外测试评价方法
随着对AEB系统研究的逐步深入以及市场上装备AEB的车型逐步增多,国内外法规制定部门和第三方测试评价机构,从本国或本区域真实的交通事故数据库中提取适用于AEB系统的典型工况,提出了相应的测试评价方法。
2.1 Euro-NCAP测试方法
Euro-NCAP将对AEB的测试评价分为3种工况:AEB City(城市工况),AEB Inter Urban(城际工况)及AEBPedestrian(行人工况),分别归入成人乘员保护、安全辅助和行人保护(从2016年开始)。按交通场景的不同,试验方法分为车对车和车对人2种工况。根据Euro-NCAP测试方法发展路线图(Roadmap),预计将于2018年引入AEBBicyclist测试规程[5]。
AEB City测试工况仅针对静态目标靶车,测试车速范围为10~50 km/h。该车速范围包含了市区工况下大多数情况,且研究表明由于市区工况下跟车距离较近,驾驶员没有充分的时间对报警做出反应,故在AEB City测试工况中不对前撞预警功能进行测试,仅测试自动制动功能。
AEBInter-Urban测试工况示意图,如图2所示。该工况包括3种:接近静态目标靶车(CCRs)、低匀速运动目标靶车(CCRm)及同速制动目标靶车(CCRb)。其中,CCRs工况中仅测试FCW功能,测试车速范围是30~80 km/h。CCRm工况中目标靶车以20 km/h的速度保持匀速行驶,测试30~70 km/h范围内的AEB功能和50~80 km/h范围内的FCW功能。CCRb工况中测试车辆与靶车的初始车速均为50 km/h,包括4个试验:1)远距离轻制动。两车间隔40 m,靶车制动减速度2 m/s2。2)远距离重制动。两车间隔40 m,靶车制动减速度6 m/s2。3)近距离轻制动。两车间隔12 m,靶车制动减速度2 m/s2。4)近距离重制动。两车间隔12 m,靶车制动减速度6 m/s2。
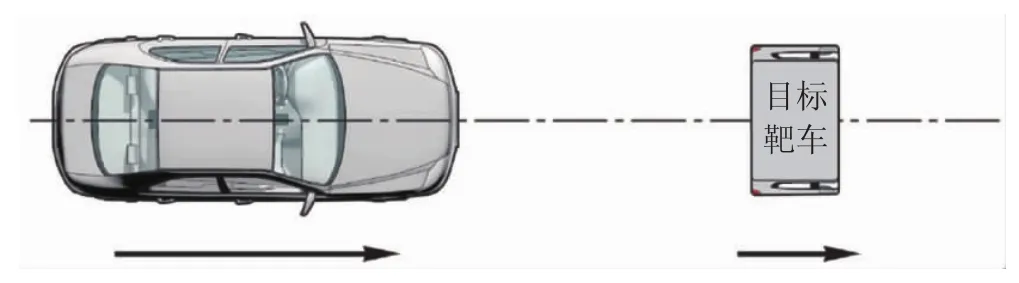
图2 AEB Inter-Urban(城际工况)示意图
AEB Pedestrian工况模拟城市道路中行人横穿马路的工况,包括4种测试工况,如图3所示[6]:1)成人远端50%碰撞工况(CVFA-50):成人假人以8 km/h的速度从测试车辆远端6 m处,沿车辆运动的垂直方向运动。要求若车辆不进行制动,假人与车辆正中间处相撞。车辆的速度范围为20~60 km/h,如图3a所示。2)成人近端25%碰撞工况(CVNA-25):成人假人以5 km/h的速度从测试车辆近端4 m处,沿车辆运动的垂直方向运动。要求若车辆不进行制动,假人与车辆宽度25%处相撞。车辆的速度范围为20~60 km/h,如图3b所示。3)成人近端75%碰撞工况(CVNA-75):成人假人以5km/h的速度从测试车辆近端4 m处,沿车辆运动的垂直方向运动。要求若车辆不进行制动,假人与车辆宽度75%处相撞。车辆的速度范围为20~60 km/h,如图3b所示。4)儿童近端遮挡50%碰撞工况(CVNC):儿童假人以5 km/h的速度从测试车辆近端4 m处,在有车辆遮挡的情况下,沿车辆运动的垂直方向运动。要求若车辆不进行制动,假人与车辆正中间处相撞。车辆的速度范围为 20~60 km/h,如图 3c所示。
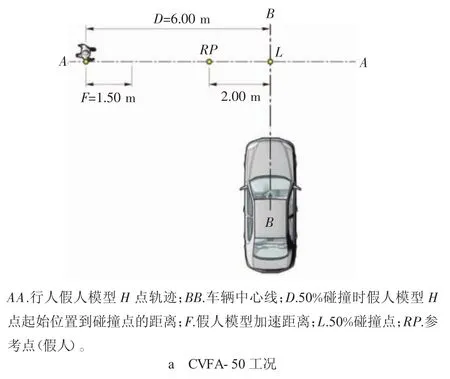
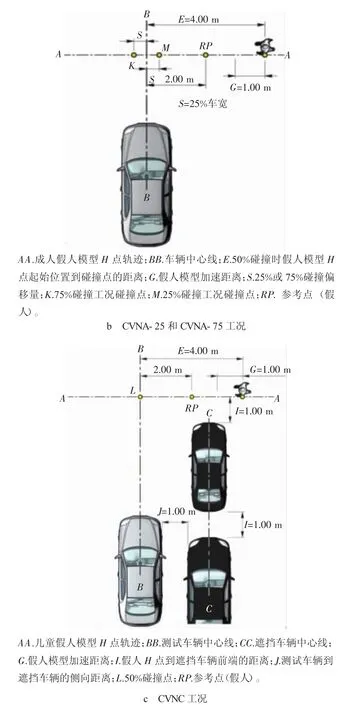
图3 AEB Pedestrian(行人工况)示意图
2.2 IIHS(美国公路安全保险协会)测试方法
美国IIHS于2013年发布了针对AEB系统的测试规程,相较于Euro-NCAP的测试规程,IIHS的测试方法仅包括CCRs工况,且车辆的测试车速固定为20 km/h和40 km/h,以碰撞速度的减少量作为评价参数。
2.3 JNCAP(日本新车安全评鉴协会)测试方法
JNCAP于2014年将AEB纳入其新车测试评价规程,归属于主动安全类版块,测试工况包括CCRs和CCRm工况。与Euro-NCAP相比,JNCAP在制订过程中,通过分析日本交通事故数据发现,由于前车突然制动而引起的追尾碰撞在日本国内发生的较少,故评价规程中不加入CCRb工况。在CCRs工况中对10~50 km/h内的AEB功能和10~60 km/h内的FCW功能进行测试;在CCRm工况中对35~60 km/h内的AEB和FCW功能进行测试。以速度的减少百分比作为评价参数,单一车速重复进行3次,取其算术平均值。
2.4 ECE法规
在ECER131 中对 M2,N2,M3,N3 型车辆上的 AEB系统提出了测试方法和性能要求。测试工况包括3类。
1)接近静态靶车:测试车辆从距离靶车120 m处以80 km/h的速度匀速接近静态靶车,要求对于M3型、N3型和>8t的N2型车辆,速度的减少量大于20 km/h;对于M2型和≤8 t的N2型车辆,速度的减少量大于10 km/h。且AEB触发时刻不晚于3 s。
2)追近移动靶车:测试车辆的车速为80km/h,针对M3型、N3型和>8t的N2型车辆的靶车速度为12km/h,针对M2型和≤8 t的N2型车辆的靶车速度为67 km/h,要求在AEB的作用下能够完全避撞。且AEB触发时刻不晚于3 s。
3)误触发测试:测试车辆从距离靶车60 m远处,以50 km/h的速度从2辆并排静态靶车中间穿过,2辆靶车的横向距离为4.5 m,要求不发出报警,也不触发紧急制动。
2.5 C-NCAP测试方法(草案)
C-NCAP管理委员会于2016年8月正式向外界公布了即将于2018版C-NCAP上使用的AEB系统测试规程草案。在研究中国道路交通事故数据的基础上,参考国外已经实施的相关测试规程,2018版C-NCAP将AEB测试归入主动安全版块进行评价。其测试工况包括车对车工况(AEB CCR)和车对人工况(AEB VRU_Ped)。 其 中 AEB CCR 中 包 括 CCRs,CCRm,CCRb;AEB_VRU_Ped 中 包 括 CVFA-50,CVFA-25,CVNA-25,CVNA-75。
与Euro-NCAP相比,C-NCAP(草案)对AEB的测试有3项不同。
1)CCRs和CCRm中车辆的速度以及CCRb中靶车减速度不同,如表1所示;2)在车与行人工况中含有一项成人远端25%碰撞工况(CVFA-25),不包含儿童近端遮挡50%碰撞工况(CVNC);3)在 AEB CCR的人机交互性(HMI)评价部分加入了交通设备误作用测试和驾驶行为误作用测试。
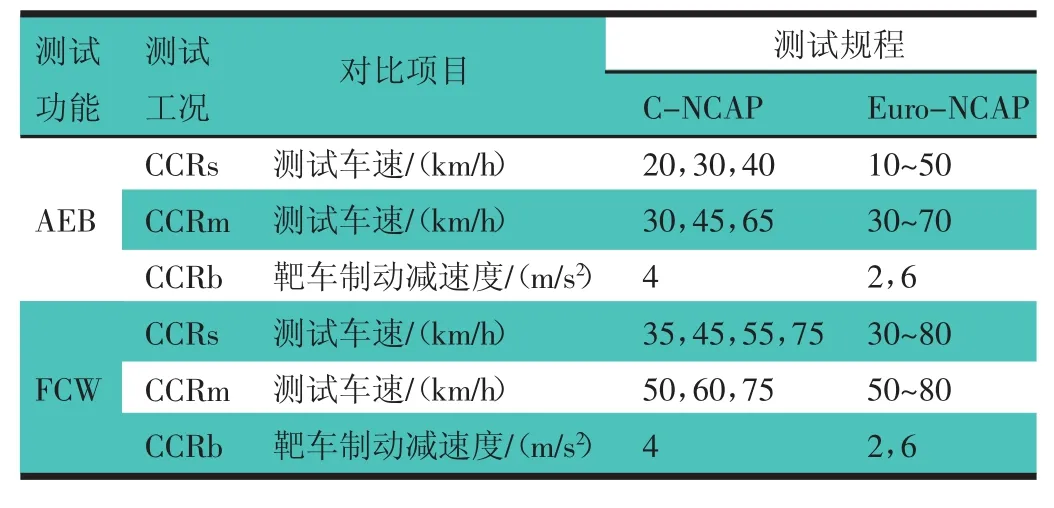
表1 C-NCAP与Euro-NCAP测试对比
交通设备误作用测试:车辆以40 km/h和72 km/h的速度,从一块尺寸为2.4 m×3.7 m×25 mm的铁板上方通过,以检验AEB系统的传感器是否会将路面上的铁板误识别为车辆,从而误触发FCW或AEB功能。
驾驶行为误作用测试:在测试车辆同车道正前方以及相邻车道上并排行驶2辆车,前方2辆车保持40km/h的速度匀速行驶,测试车辆从后方接近,直到与同车道前车距离达到15 m,维持至少3 s。随后,相邻车道前车以(3±0.3)m/s2的减速度制动,直至停止。该工况检验AEB系统的传感器会否将前方相邻车道上的车误识别为同一车道车辆,从而误触发FCW或AEB功能。
3 自动紧急制动系统(AEB)实车试验
按照JNCAP的测试规程,选用某SUV车型为样车进行试验。在正式试验开始前对制动器和轮胎进行磨合。制动器的磨合方式是10次初速度为56 km/h,减速度为0.5 g的低速制动以及3次初速度为72 km/h,减速度为0.9 g的高速制动。轮胎的磨合方式是3次定速56km/h的方向盘正弦输入,幅值为30°,周期为10次。
在JNCAP测试规程中规定:试验从低速开始,在不发生碰撞的情况下以10 km/h的速度递增,直到无法避撞。随后以5 km/h的速度递增,直至达到试验要求的最大车速或试验终止条件(碰撞的相对速度大于50 km/h或测试车辆的速度减少量小于5 km/h)。试验结果,如图4所示。
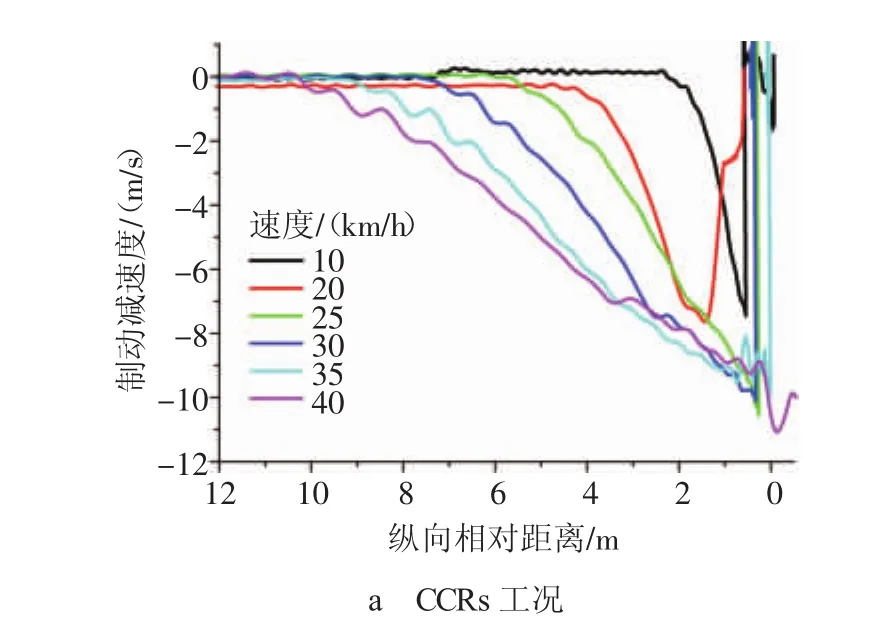
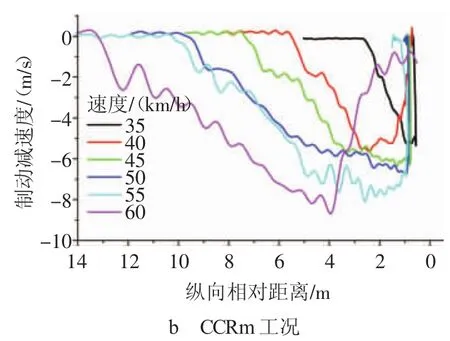
图4 自动紧急制动系统(AEB)实车试验制动减速度图(JNCAP测试规程)
依据测试评价规程,在进行CCRs试验时试验终止速度为45 km/h,最大有效速度为 40 km/h;在CCRm试验中试验终止车速为60 km/h,最大有效速度为60 km/h。
如图4a所示,随着车速的增加,制动距离也随之增大,所需的制动时间也相应地加长。从图4a中可以看出,在低速工况(≤20 km/h)下,AEB作用过程中达到的最大减速度较小,但车辆的减速度响应很快。在高速工况(>20 km/h)下,峰值减速度达到1 g,可认为已充分利用了路面的峰值附着系数,但车辆的减速度响应较慢。此外,在所有速度下均无维持减速度在一定值附近的阶段,减速度增大到所需值或最大值后即迅速停止制动。
比较相同相对速度下CCRm与CCRs的制动过程,可以发现在相对速度均为10 km/h时,2种工况下的制动过程近似,CCRm工况下的制动强度均比CCRs要小,且出现了维持制动减速度在一定值附近的阶段。由于测试车型装备的毫米波雷达传感器系统对移动目标物的识别成功率更高,车辆可以更早地确定出有效目标并开始采取制动干预,因此尽管制动减速度较低,但仍然可以避免较高相对车速的追尾碰撞工况。据此,可以看出将AEB系统针对静态目标的避撞性能测试与针对动态目标的避撞性能测试区别开来是很有意义的。
4 结论
文章对 Euro-NCAP,IIHS,JNCAP,C-NCAP 有关AEB的测试方法进行了介绍,从中可以看到各国测试机构从本国的交通实际需要出发,基于典型事故场景,选取提炼具有代表性和可重复性的测试工况。虽然工况数量远远无法覆盖实际行驶工况中的危险场景,但提供了适用于现阶段技术需求的AEB系统测试方法。
通过分析实际测试过程中对静止目标物和移动目标的AEB制动减速度的数据差异,可知相对车速并不是唯一评价AEB系统表现的因素。未来可以考虑通过添加最晚制动时刻及最大制动强度等参数来多方位评价AEB的性能。
猜你喜欢
数学物理学报(2022年5期)2022-10-09 08:58:18
电子乐园·下旬刊(2022年6期)2022-05-16 03:54:52
四川劳动保障(2021年3期)2021-01-27 19:50:42
世界汽车(2020年6期)2020-12-28 02:40:14
数学大王·低年级(2020年4期)2020-04-20 10:59:47
时代汽车(2020年23期)2020-03-03 17:51:10
电子制作(2019年16期)2019-09-27 09:34:56
电子制作(2019年15期)2019-08-27 01:12:02
汽车技术(2017年7期)2017-08-08 03:01:48
汽车工程学报(2016年6期)2017-01-11 17:53:19