
惯性陀螺定位技术与可视化验管工艺在管线探测中的应用
2017-08-16 09:38陈亮
中国煤炭地质 2017年7期
陈 亮
(中国石化销售有限公司华东分公司,南京 210011)
惯性陀螺定位技术与可视化验管工艺在管线探测中的应用
陈 亮
(中国石化销售有限公司华东分公司,南京 210011)
穿越铺管技术(HDD)因具有埋深大、路由呈曲线状的特点,被广泛应用于地下油气管道的铺设。HDD对钻进轨迹的控制主要依靠随钻测量技术(MWD),受电磁干扰影响,管道工程竣工图与实际位置存在较大误差,而传统的地下管线探测技术受管道材料物性的约束,无法准确探测该类管道。自主研发的惯性陀螺定位系统依靠航向和姿态传感器在管道内的运动,可以精准测算出管道的三维坐标。为验证惯性陀螺定位技术的探测效果,在点探机负压成孔后插入PVC管,利用超声成像仪实现可视化验管。二个深部油气管线精确探测实例表明,惯性陀螺定位系统与可视化验管工艺在油气管道铺设工程及管线检测效果显著,具有广阔的应用前景。
穿越铺管技术;惯性陀螺仪定位;可视化验管工艺;真空负压点探机
0 引言
近年来,许多地下管线受损重大事故发生均因管道竣工资料不准及物探成果误差大导致,如青岛112重大事故、大连油气管道被损重大事故、宁波北仑顶管工程事故,等等。深部管道精确探测问题,已严重阻碍了后续穿越工程的施工。
随着西气东输、川气东送等国家重点项目建设高速发展,穿越铺管技术(水平定向钻HDD施工技术)已得到广泛应用,其对钻进轨迹的控制主要依靠随钻测量(MWD)技术。由于HDD穿越技术铺设的管道一般埋深较大(5~30m)、路由曲线,在电磁干扰强烈区域,其定向和控向仪器易受电磁干扰,管道工程竣工图与实际位置存在较大误差(10%~20%)[1-2]。
本文将介绍自主研发的惯性陀螺精确探管技术及其在精确测定深部油气管道的应用效果,并采用可视化验管工艺,对其探测结果进行验证。
1 惯性陀螺定位系统
1.1 测量原理
①航迹推算原理。把载有航向和姿态传感器的管内测量单元放入管道并使之沿管道运动,测出管道各个位置的航向和俯仰角。根据航向、姿态信息与里程信息推算出管道的三维坐标。
②多传感器融合技术。系统航向和姿态信息测量采用磁罗盘、微型姿态系统和陀螺仪等多种传感器。其中磁罗盘具有静态精度高、无累积误差的优点,但易受铁磁体干扰;微型姿态系统的俯仰、滚转角静态测量精度高,但动态精度低,航向数据在运动速度不高时较差;而陀螺仪具有动态精度高,抗电磁干扰的优点,但存在漂移现象。本系统将各个传感器的有效信息进行融合,在静态测量时利用磁罗盘和微型姿态系统测姿,在动态测量时利用陀螺仪角速率信号积分得到动态航向角信息,对静态数据进行校正,从而确保管内测量单元姿态角的测量精度和抗干扰能力。
1.2 系统构成
系统由软件与硬件两大部分组成。
1.2.1 硬件构成
硬件部分包括管内测量单元、外部里程计、外部控制单元、PC机和直流稳压电源(图1)。
①管内测量单元由钢缆牵引在管道内运动,用于探测管道各个位置的姿态信息。该仪器内含微型姿态系统和一个高精度光纤陀螺以及磁罗盘,其数据信号通过高性能单片机电路进行A/D采集和RS-485转换,以确保测量精度和信号传输能力。其中滚转角和俯仰角信息主要通过加速度计得到,而航向角测量中融入了磁罗盘和陀螺仪信息,具有很高的精度和自主性。管内测量单元外壳用硬铝材料加工而成,尺寸小,具有良好的抗冲击和防水性能,确保内部传感器和电路安全工作。
②外部里程计用于读取测量仪所走过的长度,测量仪尾部的牵引钢缆带动里程计滑轮转动时,里程计的光码盘将输出脉冲计数,通过外部控制单元送至PC并转换为里程信息。
③外部控制单元内含高性能单片机电路,用于采集外部里程计数据并与PC通讯。该单元还包括两个有源RS-485/232信号转换器,用于管内测量单元和PC之间的通讯。该单元连接直流稳压电源,负责管内测量单元的电源供给。
④PC用于控制和读取各传感器的姿态和里程信息,进行融合计算,得到管道准确位置和形状并在监视器上实时显示。
1.2.1 软件构成
系统配套软件包括控制-通讯、计算、显示和数据管理四个功能模块。①控制-通讯模块用于实时采集各传感器数据并对各硬件模块进行控制。②计算模块负责用获得的数据计算出当前的管道位置信息。计算时充分考虑到不同环境下各传感器数据的有效程度,对其进行数据融合,确保系统的测量精度和抗干扰能力。③显示模块包括数据显示和图形显示两种方式,数据显示部分包括了传感器姿态、里程和通讯状态等必要信息;图形显示分为平面和三维立体两种方式,其中三维显示方式能直观形象地反映管道形状,支持用键盘进行视角旋转;平面显示方式包括主视图、俯视图和侧视图三种角度。在平面视图中操作人员可以用鼠标方便地捕捉各个测量点的三维坐标。三种平面视图和立体视图之间可以自由切换。④数据管理模块包括数据的打开、存储和实测数据与标准数据的对比功能。特别设计的数据存储格式确保了各种有用信息都得以保留, 便于存档和后续研究。软件界面和流程图如图2、图3。
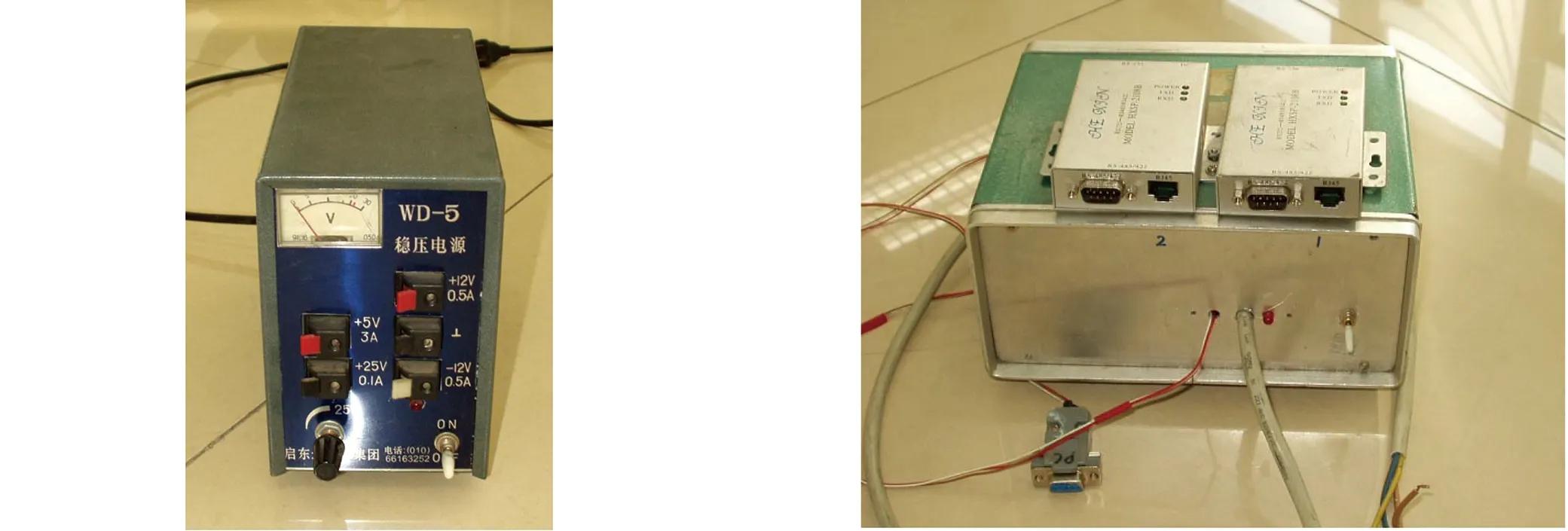
直流稳压电源 外部控制单元图1 惯性陀螺仪硬件构成Figure 1 Inertial gyroscope hardware configuration
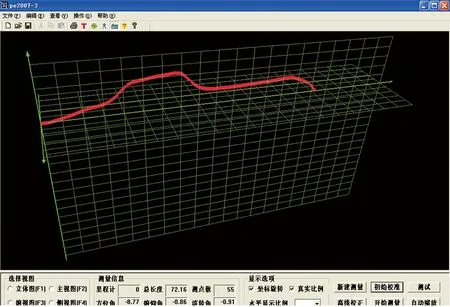
图2 惯性陀螺技术数据处理三维显示Figure 2 Inertial gyroscope technique data processing 3D display
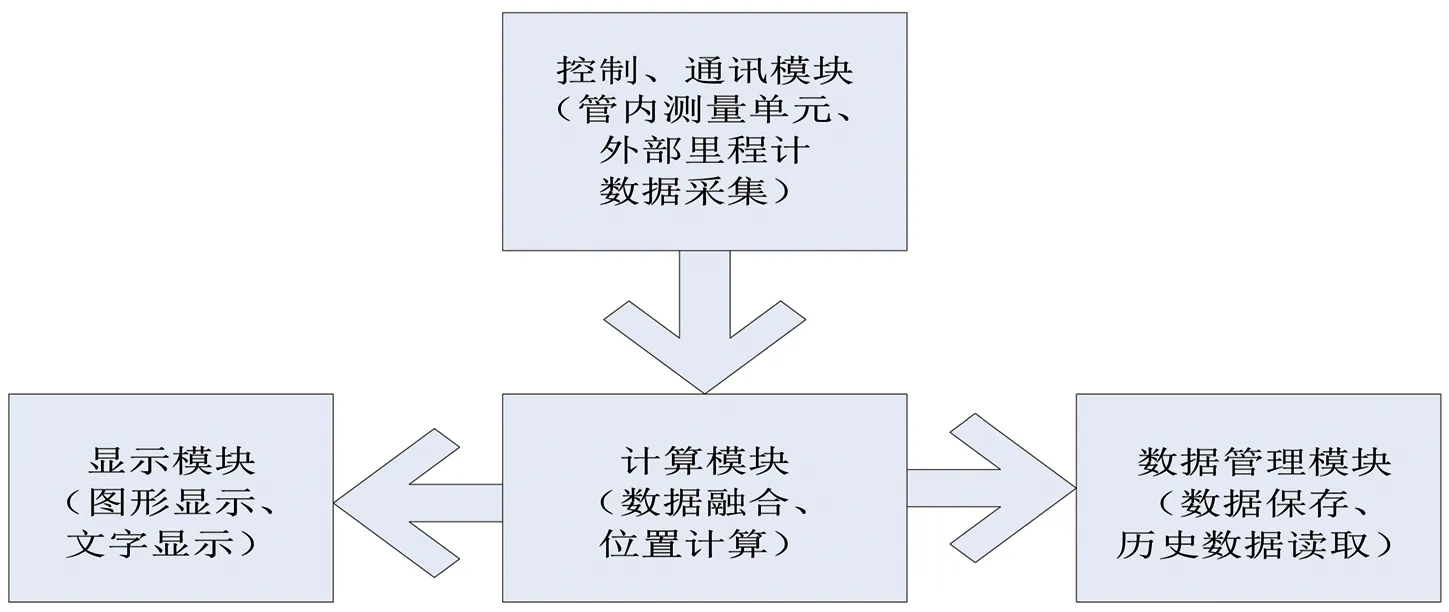
图3 惯性陀螺技术数据处理流程Figure 3 Inertial gyroscope technical data processing flow chart
陀螺仪管道定位系统具有自主性强、控干扰、精度高等特点,可用于各种材质(钢管、塑料管、水泥管等)、不同口径及深度的管道测量。
2 可视化验管工艺
惯性陀螺管道定位是一种间接地探管手段,为验证物探成果,需要研究深部管道探测验证工艺。
在长期的管道工程管理和监护工作中,可视化验管工艺应用效果比较显著,已成为国内油气管道运营管理中重要的技术管理手段。
首先利用真空负压点探机的的真空泵吸抽空气,形成一定负压,将其抽吸管插入浅孔中,在气流的作用下把泥土从吸管吸出,从而实现“软开挖”。在实际工作中,对于松软土层,直接采用抽吸方式进行挖掘;在土层硬度较大,或硬度黏性都比较大时,运用高压水流对硬土层破碎成松泥,然后再吸走。通过对该技术及真空负压设备反复改进,目前点探深度可达到15m。

图4 真空负压点探机Figure 4 Vacuum negative pressure point finder
针对美国MALAFULUN点探机进行改进,在负压点探机成孔后,插入PVC管(图5),在PVC放入超深成像仪对深部油气管线(<20m)(图6)扫描,该验证深部管线状态。

图5 PVC 管中放入成像探头Figure 5 Imaging probe insert into PVC pipe
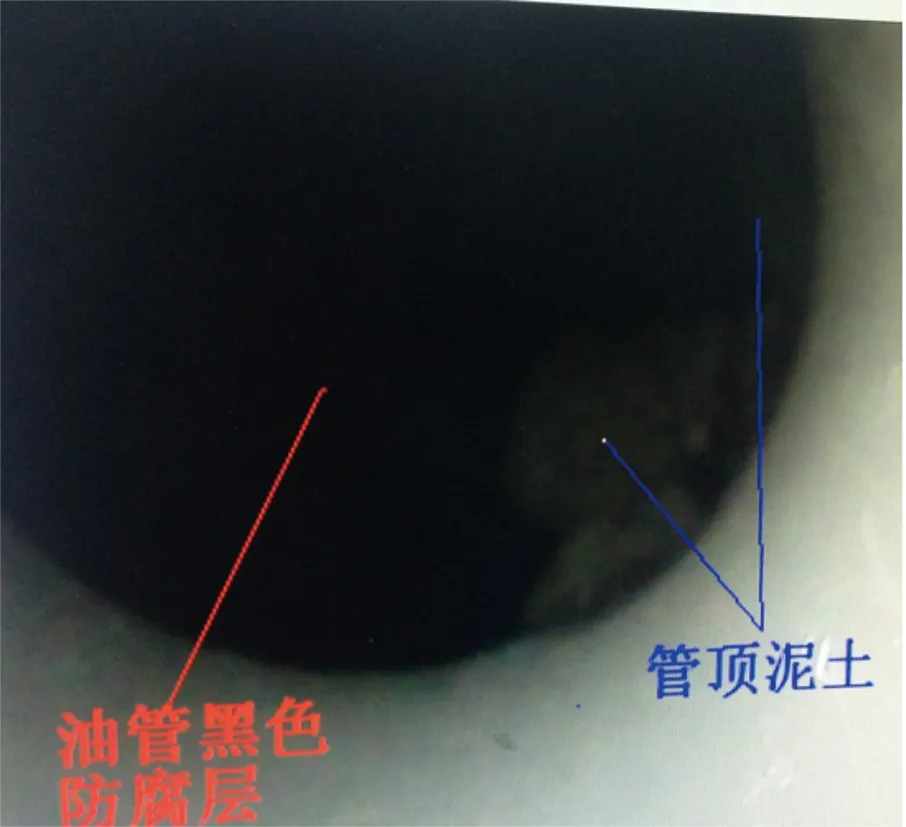
图6 深部管道图像Figure 6 Deep part pipeline image
3 应用实例
3.1 南京某公路天然气管道探测实例
3.1.1 工程概况
南京某公路改扩建工程是市重点工程,工程采用高架桥+地面道路同步改造建设方案。主线高架快速路及匝道桩基工程涉及西气东输、川气东送、成品油等重要地下管线。而这些重要的管线在过河过路段为定向钻穿越铺设,埋深大于9m,且施工区域电磁干扰强烈(通讯基站、高压线等),常规的物探方法无法准确探测。
3.1.2 探测方法
我单位与某物探单位合作,通过多次现场踏勘、采集了现场的电磁干扰强度、地层土力学特征等地球物理参数。 确定了惯性陀螺技术探测,点探成像验证的技术路线。
首先通过与天然气公司等管道权属单位工作人员交流,明确探测目标;在确定天然气管道停气的情况下,在定向穿越管道的出入点开口并充氮;微型机器人将牵引绳穿入管道中;牵引陀螺定位仪从管道一端匀速到另一段(图7);
陀螺定位仪自动采集定位数据;定位数据经过资料处理、分析,得到管道空间位置(三维坐标);在关键点位,开小孔,采用点探成像验证探测成果。
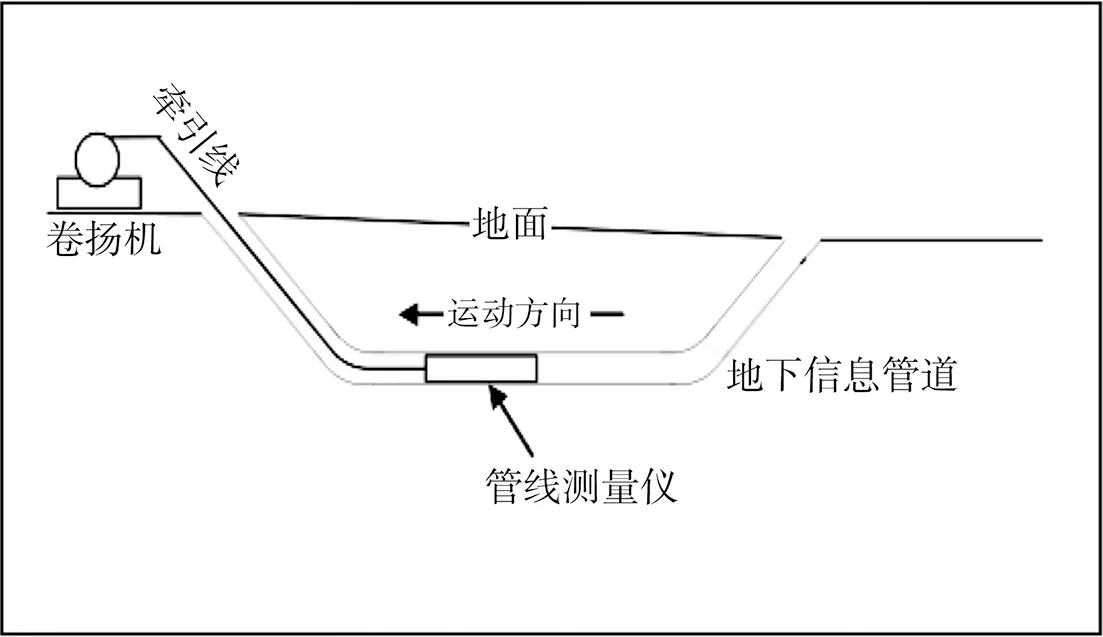
图7 管道陀螺定位测量示意图Figure 7 A schematic diagram of pipeline gyroscope positioning
3.1.3 探测成果
图8为七乡河大道高压天然气管道的精探成果图。该处的高压管道为高密度塑料管,而且埋深大于10m。精确探测成果(陀螺定位探测)与原竣工资料差距较大(平面位置相差25m)。根据管道权属单位及业主单位的要求,在32、33号点布置点探成像孔。成像验证结果表明,在32、33号点下埋深15m处为高压管道,其惯性陀螺定位的平面误差仅为20cm,验证了探测成果的准确性。
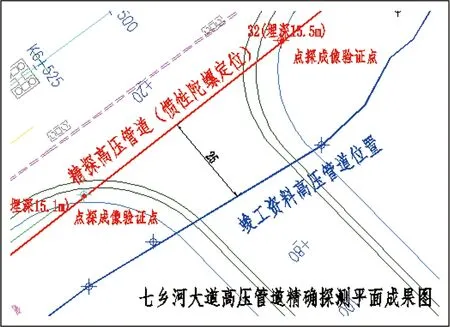
图8 南京某公路七乡河下管线精探成果图Figure 8 Precise positioning result of pipeline under a Nanjing highway Qixiang River
3.2 苏州成品管道精确探测
3.2.1 工程概况
2016年,苏州某热电公司在绕城60km管道建设中,设计采用定向钻进铺管技术。该管道施工项目多处与DN325成品油管道(钢管)相交。在过河段的成品油管道均为定向穿越管道,埋深大。热电公司委托了多家管线探测单位探测成品油管道。但因成品油管道口径小、埋深大,探测成果误差大,无法满足安全生产要求。热电公司绕城管道建设工程进展缓慢。
3.2.2 精确探测方法及成果
经过多次现场测试及试验,采用以惯性陀螺定位技术为主的综合物探方法探测过河段成品油管道。
首先在明确探测目标的前提下,利用电磁感应法追踪天然气管线的大致位置,并对河两岸穿越管道出入点开口处进行有效保护;然后利用微型机器人牵引陀螺定位仪在管道内匀速运动以采集数据,通过处理分析得到河道下油气管道的三维坐标(图9)。通过对关键点(热电管道与成品油管道交叉点)采用点探成像法验证,平面及深度误差小于0.75m(管道埋深12.5m)。
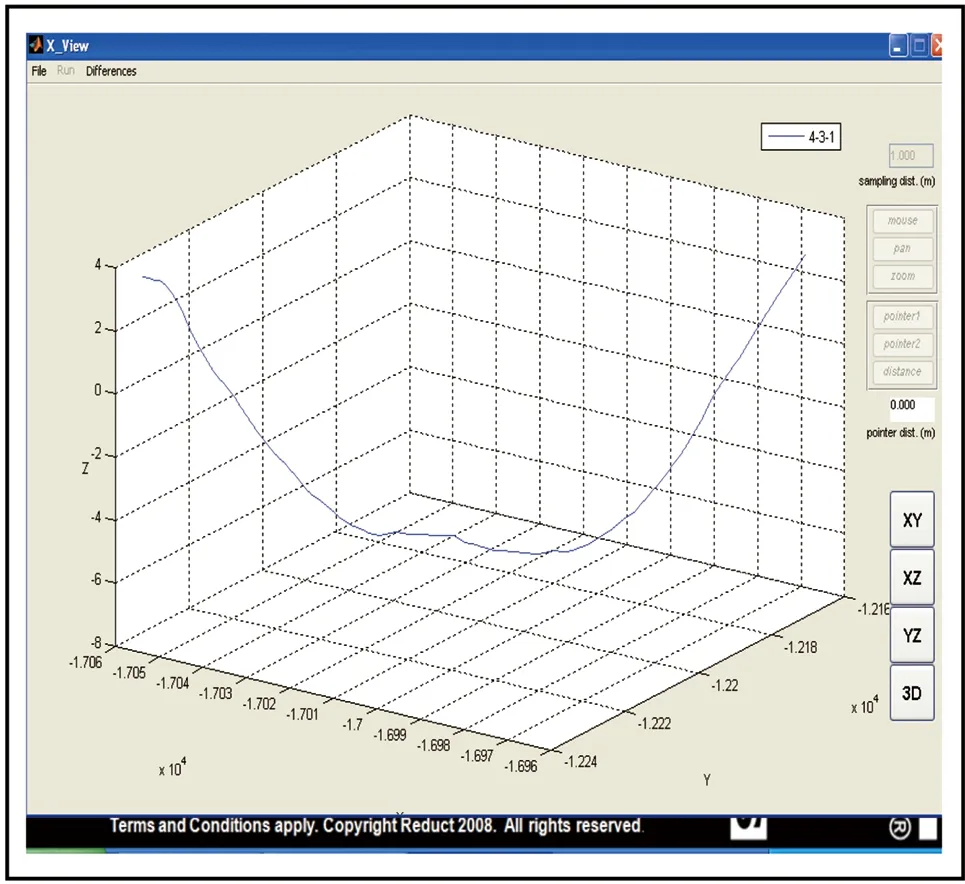
图9 运河下油气管道陀螺定位图Figure 9 Gyroscope positioning of oil and gas pipeline under canal
4 结语
惯性陀螺仪定位系统和可视化验管工艺是精确探测深部油气管线的有效探测方法和验证手段,该探测技术精确高,适用于各种材质及口径的深部油气管道探测,具有广泛的适用性和广阔的应用前景,特别适用于过河越江等深部油气管道的竣工测量。目前惯性陀螺定位技术在管道内部测量,需停气开口,探测前期准备工作比较复杂,需要在带气探测方面进一步研究。另陀螺定位仪在微型化方面需改进,以适应于小口径(直径小于30 cm)深部管线的精确探测。
致谢:北京航空航天大学宋华教授、上海市地质调查研究院王永高工、杭州市城乡建设设计院有限公司王胜炎总工、上海非开挖信息工程技术有限公司李大海高工为本文提供了基础资料。
[1]余志明.浅谈非开挖管道的探测技术方法[J].广东建材,2008(8):160.
[2]李大海,杨智浩,陆建卫,李啸.非开挖管道定位系统的研制与应用初探[C]//第一届中国城市地下工程非开挖技术研讨会论文集.北京:中国非开挖技术协会,2004.
Application of Inertial Gyroscope Positioning and Visual Pipe Inspection Process in Pipeline Detection
Chen Liang
(EastChina Branch, Marketing Co. Ltd., SINOPEC, Nanjing, Jiangsu 210011)
The horizontal directional drilling (HDD) pipe laying technique has features of deep buried depth and curve-shaped route, widely used in underground oil and gas pipelines laying. The HDD controlling on drilling trace is mainly relying on measurement while drilling technique (MWD). Since impact from electromagnetic interference, the pipeline project completion plan has rather large error in comparison with actual pipeline position. While traditional underground pipeline detection technology is restricted by pipe material physical properties, unable to detect some types of pipeline accurately. A self-developed inertial gyroscope positioning system relying on the heading and attitude transducer movement in pipeline can detect 3D coordinates of those kind pipelines accurately. To verify inertial gyroscope positioning technique effect, after the point finder negative pressure hole-forming to insert a PVC pipe, using ultrasonic imaging device can realize visual pipe inspection. The precise detection of two deep oil and gas pipelines have shown that the distinct effects of inertial gyroscope positioning system and visual pipe inspection process have illustrated the wide application prospect in oil and gas pipelines laying project and pipeline inspection.
HDD pipe laying technique; inertial gyroscope positioning; visual pipe inspection process; vacuum negative pressure point finder
10.3969/j.issn.1674-1803.2017.07.17
1674-1803(2017)07-0075-05
陈亮(1984—),男,工程师,,长期从事油气管道的管理和探测技术研究。
2017-06-10
责任编辑:孙常长
��
A
猜你喜欢
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
油气地质与采收率(2021年4期)2021-08-04
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
非常规油气(2021年2期)2021-05-24
中国海上油气(2020年6期)2020-03-15
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
快乐语文(2018年36期)2018-03-12
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
