
激光导航智能机器人巡检系统在特高压变电站的应用
2017-08-12 15:34郭杨,陈昊
电力工程技术 2017年4期
郭 杨, 陈 昊
(国网江苏省电力公司检修分公司,江苏 南京 210010)
激光导航智能机器人巡检系统在特高压变电站的应用
郭 杨, 陈 昊
(国网江苏省电力公司检修分公司,江苏 南京 210010)
为适应特高压变电站设备巡检的新要求,在对比了机器人导航模式的基础上,介绍了一种基于激光导航技术的变电站智能机器人巡检系统。讨论了该系统的结构组成、功能定义、任务执行等方面的内容。对机器人在可见光摄影、表计数据读取、红外热像检测方面的效果与传统巡检效果的进行了比较。现场实际应用情况表明,该巡检系统能很好地适应特高压变电站设备众多、结构复杂的环境。巡检系统长时间的续航能力和精准的检测方法,保证了设备巡检的可靠性,为特高压变电站的日常运维管理工作提供了有力支持。最后对机器人系统使用中的问题提出了建议和改进措施。
激光导航;智能机器人;巡检;特高压
0 引言
变电站电力设备的巡视检查是保证变电站安全运行,提高供电可靠性的一项基础性工作[1]。变电站的传统巡检工作均由运行人员完成,主要通过视觉和听觉对设备的缺陷进行判断,通过红外热像仪对设备进行测温。但是,通过人工模式难以对设备进行长时间高精度的检查。同时,该种模式存在劳动强度大、工作效率低等缺点。随着电力装备技术和计算机网络技术的革新,以及现代特高压交直流电力工程的大力建设和蓬勃发展,传统的变电站巡检方式已经难以适应特高压变电站占地面积大、设备数量多的特点。如何在大电网运行的新形势下,采用新技术、新方法以减轻运维人员的巡检工作强度,提高工作效率,是今后面临的主要研究课题之一[2-8]。
1 特高压变电站巡检工作的要求
目前,我国已建成投运的1000 kV特高压交流变电站已达13座,根据国家“十三五”规划,在未来5年内还将兴建20多座特高压交流变电站,以构成国家电网的特高压主网架。特高压变电站具有占地面积大、绝缘等级高、设备数量多、结构复杂等特点。站内1000 kV和500 kV等级均采用GIS设备,与GIS设备相关联的SF6压力表计数量众多,人工抄录压力值费时费力。同时,GIS设备采用全封闭模式,断路器、隔离开关、接地闸刀的位置指示不明显,不便于运维人员观察[9]。主变压器、高压电抗器等设备的套管线夹和桩头的位置很高,人工观察和测温难度较大。特高压变电站作为电网中的枢纽节点,除年度检修以及临时消缺工作外,其倒闸操作的次数很少。通过巡视检查发现设备的隐患、缺陷,并及时消除,保证全站的安全运行成为了日常工作的重点。根据文献[10]要求,特高压变电站例行巡视每天不少于2次,全面巡视每周不少于1次,专业巡视每周不少于1次,熄灯巡视每周不少于1次。因此,相比传统低电压等级变电站,特高压变电站的运维管理对巡检工作的全面性和准确度方面提出了更高的要求。2016年3月,江苏省内首座特高压变电站建成投运,该站的巡检模式和质量对日后省内其他新建特高压变电站运维管理工作中相关制度修订、经验推广起着重要的指导意义。
2 机器人导航模式对比
目前,变电站室外智能巡检机器人一般采用轮式移动机器人。因此,导航和定位是机器人完成巡检任务的前提所在,导航系统的性能直接决定了巡检任务的质量。在巡检机器人出现之初,导航模式为磁导航,通过预埋在巡视路线上的磁条和机器人车身上的磁传感器相匹配来完成导航定位功能[11,12]。但根据近几年来的现场运行经验,采用磁导航模式的机器人在变电站进行巡检任务的案例,发现了如下问题:(1) 磁轨道铺设时,地面施工复杂,工作量大,机器人运行路线不灵活,机器人越障高度受限于磁传感器检测距离;(2) 机器人在行驶过程中只要检测不到磁信号或检测信号装置出现故障,就会偏离磁轨道或停滞不前,从而影响整个巡检任务;(3) 当临时终止巡检任务再去执行另一个任务时,机器人因重新规划路径,调整行驶方向,可能会冲出磁轨道。以上问题在现有方式下较难解决。
为解决以上问题,激光导航系统被应用于巡检机器人。激光导航技术是利用机器人自身安装的激光雷达进行距离测量。激光雷达通过旋转镜面机构向外发射激光[13],当扫描到由激光反射器构成的路标时,反射光被光电接收器件接收并处理作为检测信号,然后通过站内局域网传递给上位机进行数据处理,上位机根据事先已采集的全站路标的位置信息和检测信号,计算出机器人在当前路标坐标系下的位置和方向,以此完成导航工作。激光导航模式具有定位设备成本低、可全时段工作、不受电磁干扰、定位精度高、无累积误差、地面附属设施施工简单等优点。该导航模式被运用于机器人巡检系统,具有良好的效果[14]。
3 机器人巡检系统的构架与功能
3.1 机器人巡检系统的构架
该特高压变电站机器人巡检系统采用分层式控制结构,共分为2层:基站控制系统层和移动站系统层[15]。如图1所示。
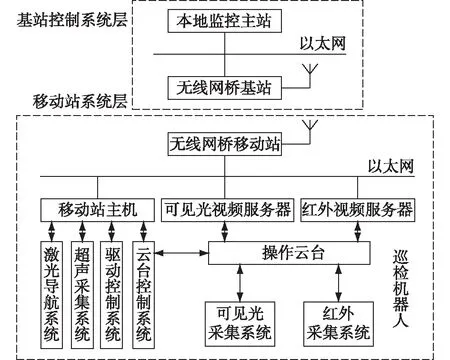
图1 机器人巡检系统构架Fig.1 Architecture of robot inspection system
基站控制系统层主要由站端监控计算机系统、交换机以及相应的无线网桥基站等设备组成。监控主站系统基于Windows系统,采用C++面向对象的编程语言开发设计,具有友好的操作交互界面,完成监测功能,为机器人巡视运动路线的规划提供相应的命令及环境信息,并可以对机器人拍摄的图像,采集的设备数据进行分析、存储,并提供专家系统诊断,具有实时告警功能。
移动站系统主要由主控计算机、运动控制、导航定位、巡视检测、电源系统、网络通信系统以及机器人机械结构等模块组成,实现机器人运动控制、导航定位、可见光及红外数据检测采集以及状态信息上传等功能,结合基站控制系统,完成机器人遥控巡视和自动规划巡视等功能。
3.2 机器人巡检系统的主要功能
智能机器人巡检系统以人工设定巡视任务,全自动执行为主,结合本地或远方遥控为辅助手段进行工作,巡检内容包含设备可见光拍照、红外测温,仪表参数读取等,具有巡检方式客观化、灵活性强,检测方式多样化、智能化等特点。同时,系统集巡检任务、路径规划、报表生成、缺陷定级于一体,实现了巡检过程全自动管理,并提供了数据分析和决策支持。其主要功能如表1所示。
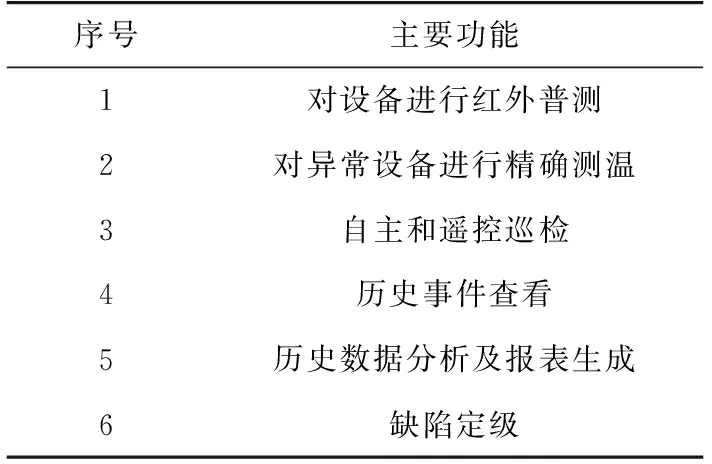
表1 智能机器人巡检系统主要功能Table 1 The main function of intelligent robot inspection system
3.3 巡检任务规划
由于特高压变电站场地面积大、设备多,单台机器人无法在有效时间内完成所有设备的巡检工作。因此,该站的智能机器人巡检系统在移动站系统层特配置了2台巡检机器人,增加了巡检系统的冗余性和可靠性。其中,1号机器人负责1000 kV设备区的巡检工作,2号机器人负责主变及110 kV设备区、500 kV设备区的巡检工作。巡检任务包括主设备的可见光拍照、红外测温、仪表参数读取。主要检测设备有GIS套管、线夹、变压器本体、隔离开关接头以及SF6气压表和开关油压表。根据站内的设备分布情况,共设定了3条例行巡检路线,即“1000 kV设备区巡检路线图”、“主变及110 kV设备区巡检路线图” 、“500 kV设备区巡检路线图”。机器人运行电子图如图2所示。在例行巡检任务的基础上,该系统还具有制定针对某一类设备或某几类设备的巡检任务的功能,例如对1000 kV设备区避雷器的全面巡检,对500 kV区域GIS设备SF6压力表计数据的读取。除以上2种巡检模式外,该系统还具有针对某单一设备的特殊巡检功能,例如对主变油枕油位的观察,对敞开式隔离开关触头的红外测温等。

图2 机器人运行电子地图Fig.2 Digital map of robot operation
3.4 巡检任务基本信息
根据该站的设备分布情况和《变电站日常管理规定》中关于设备巡视的要求,特为机器人制定了6个例行巡视任务,以及随时可以启动的定制巡视任务和特殊巡视任务,并给出了详细的巡检设备数和巡检时间,如表2所示。
表2 机器人巡检任务
Table 2 Robot inspection tasks
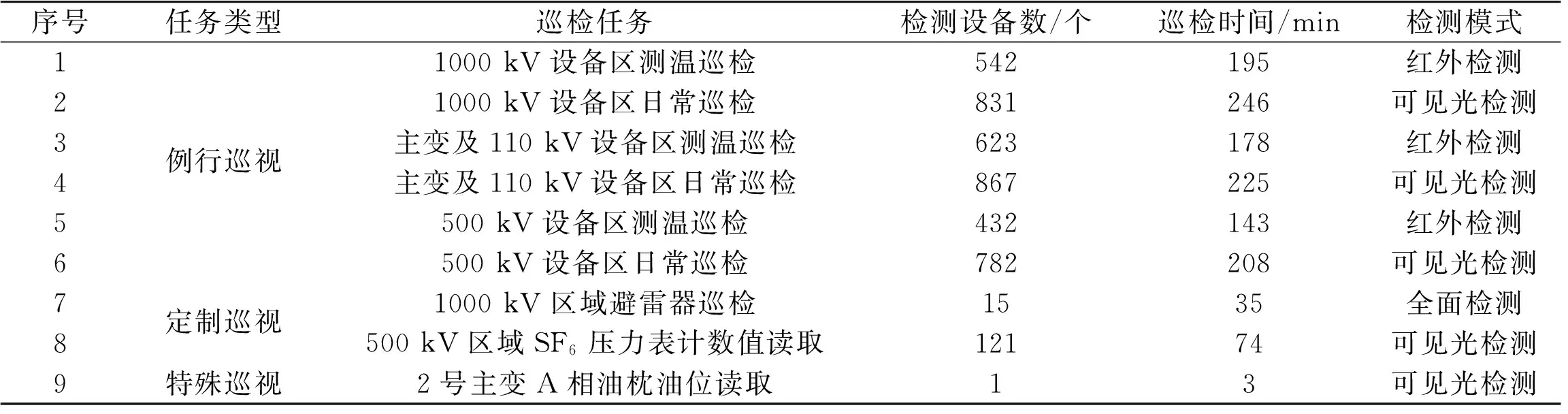
序号任务类型巡检任务检测设备数/个巡检时间/min检测模式11000kV设备区测温巡检542195红外检测21000kV设备区日常巡检831246可见光检测3例行巡视主变及110kV设备区测温巡检623178红外检测4主变及110kV设备区日常巡检867225可见光检测5500kV设备区测温巡检432143红外检测6500kV设备区日常巡检782208可见光检测7定制巡视1000kV区域避雷器巡检1535全面检测8500kV区域SF6压力表计数值读取12174可见光检测9特殊巡视2号主变A相油枕油位读取13可见光检测
3.5 机器人巡检结果分析对比
激光导航机器人巡检系统将先进的检测方法和技术运用于变电站设备巡检和缺陷定级,为验证其巡检功能的可靠性和实用性,本文从清晰度、准确度、时效性3点出发,将机器人在可见光拍照、表计数据读取、红外测温等方面的巡检结果与人工巡检结果相比较,以验证其性能的优越性[16,17]。
(1) 可见光检测对比。如图3、图4所示。

图3 盱泰Ⅱ线T022断路器分合闸位置指示Fig.3 Switch position indication of XuTai II line T022 breaker
结论分析:由于机器人具有高清大倍率变焦镜头,在被拍摄对象位置选择恰当的情况下,其拍摄效果比人工观测效果要好。特殊情况下,当被拍摄对象位置不佳时,拍摄结果略差于人工结果,但机器人机动性很强,可随时进行拍摄,节省了人力。
(2) 表计数值读取对比如图5、图6所示。
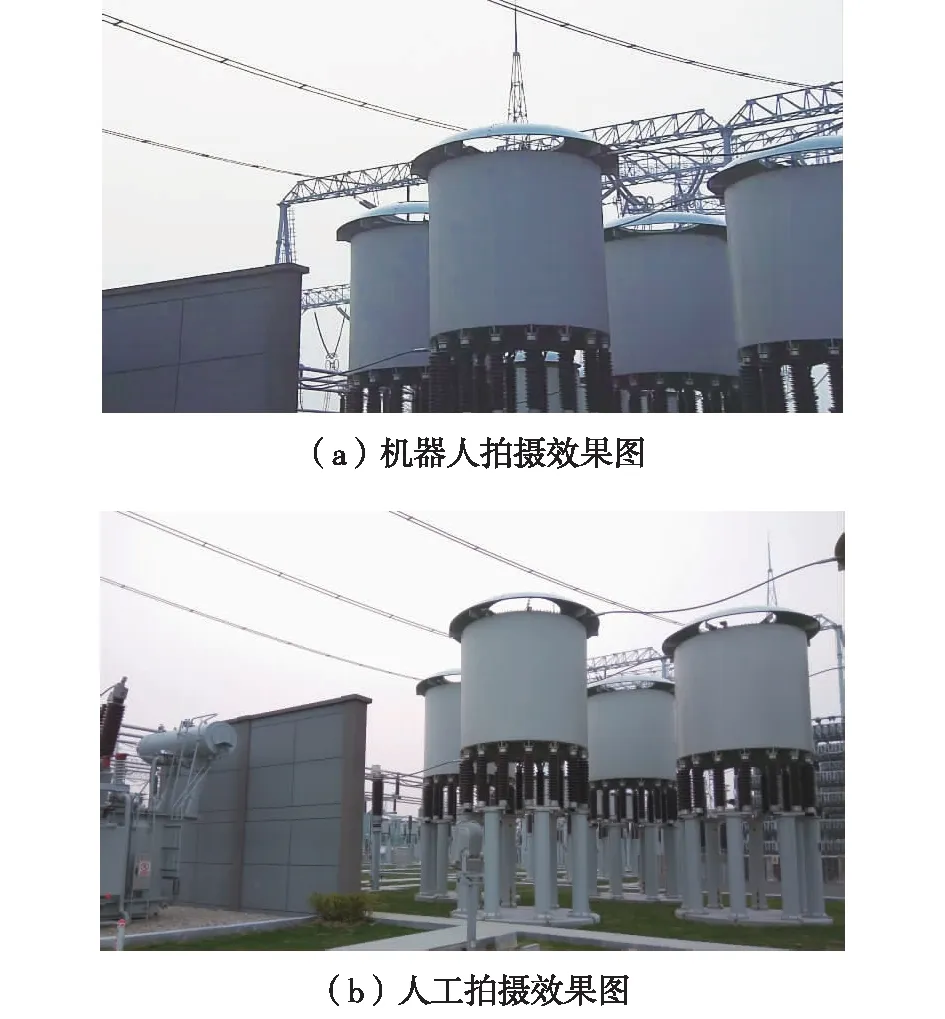
图4 2号主变33号低抗本体Fig.4 NO.33 low-voltage reactor noumenon of NO.2 transformer
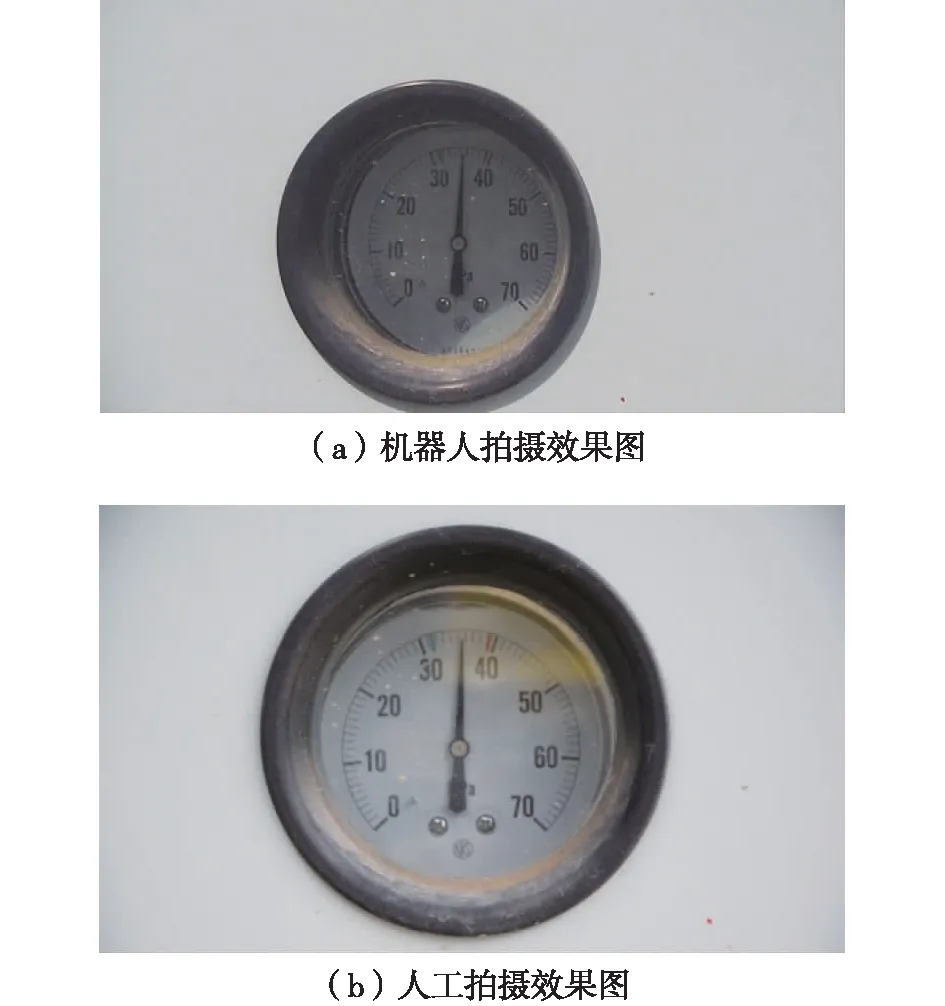
图5 盱泰Ⅱ线T022断路器油压表压力值指示Fig.5 Oil pressure indication of XuTai II line T022 breaker

图6 2号主变500 kV避雷器动作次数指示Fig.6 Action number indication of NO.2 transformer 500 kV arrester
结论分析:表计读取数值清晰,效果与人工拍摄效果基本一致。站内GIS断路器设备液压机构表计,各电压等级的避雷器数量众多。采取机器人拍摄稳定性高,不会遗漏,机器人拍摄完毕后会自动读取数据,生成表格,便于调阅和读取,提高了工作的时效性,极大地减轻了运维人员的工作量。
(3) 红外测温结果对比如图7、图8所示。
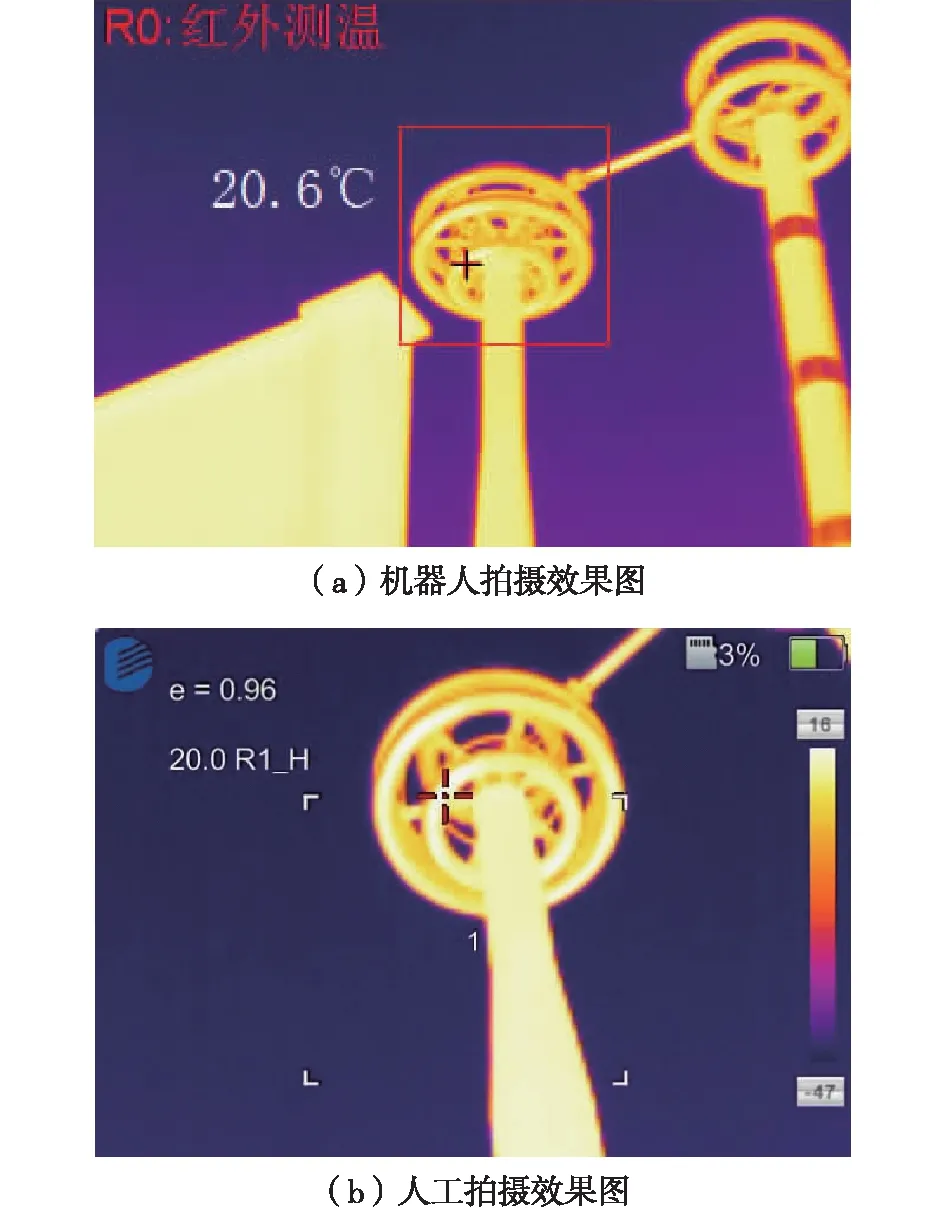
图7 盱泰Ⅰ线高抗1000 kV套管接头红外测温图谱Fig.7 Infraed tempreature image of XuTai I line high-voltage reactor 1000 kV bushing joint
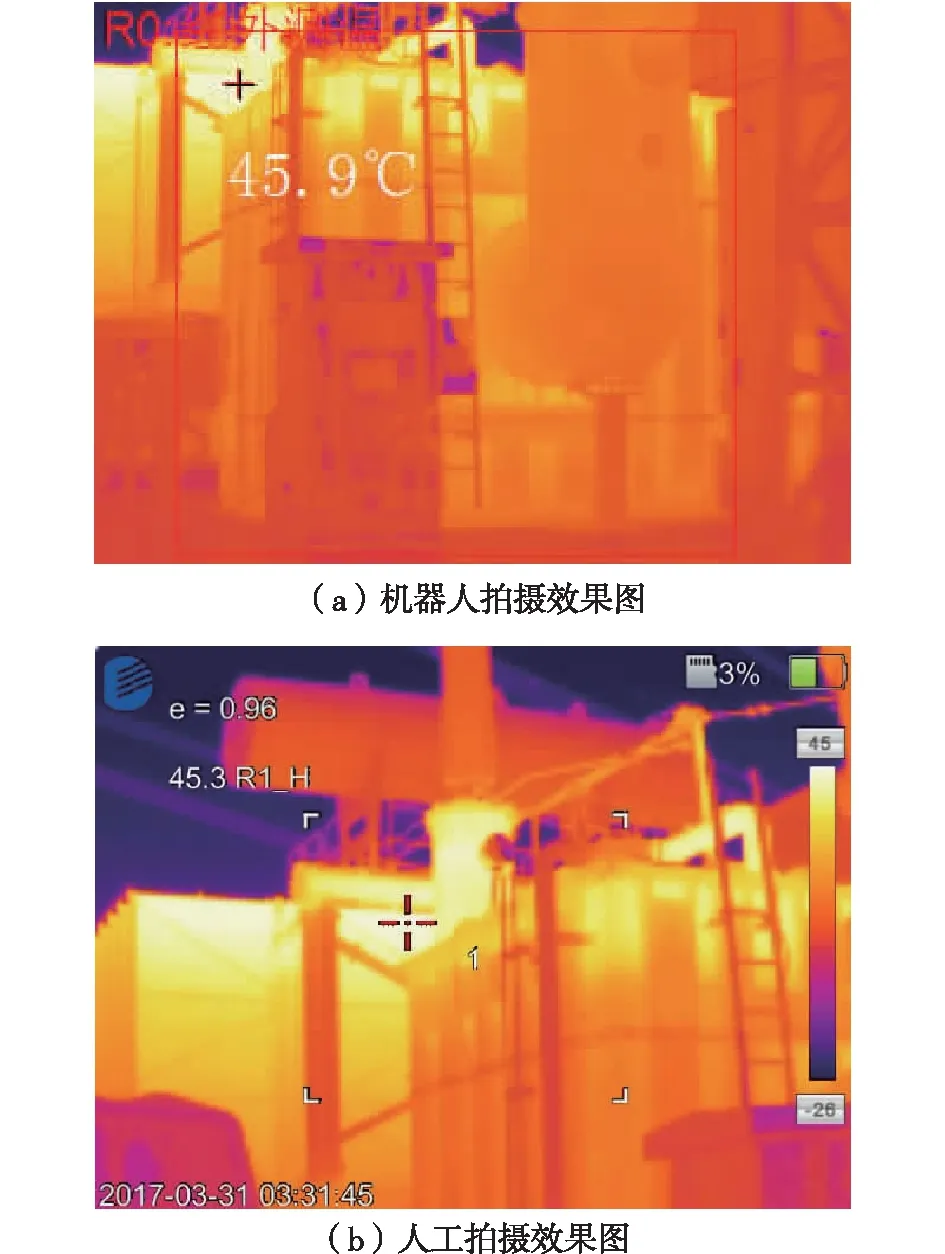
图8 盱泰Ⅰ线高抗本体红外测温图谱Fig.8 Infraed tempreature image of XuTai I line high-voltage reactor noumenon
结论分析:从以上红外图谱对比可见,机器人红外测温结果与人工手持红外测温仪测量结果基本一致,误差很小。当巡检设备数量众多时,机器人系统能发挥其长时间的续航能力,有效提高了工作效率。同时,机器人测温采用模式识别技术,测温结果精确度和可靠性更高。
4 结论
本文对特高压变电站智能机器人巡检系统做了全面的介绍,该系统以先进的激光导航定位技术为基础,结合先进的控制策略和检测手段,在设备巡检和红外测温方面体现了明显的优点。通过强大的数据采集和报表管理功能,提高了巡检数据处理效率,切实减轻了运维人员的工作量。但是,鉴于站内各型设备的不同特点,以及巡视道路和现场天气等具体情况,该系统还存在以下不足之处:
(1) 站内GIS设备若存在漏气情况,较难发现;机器人不具备对设备外表缺陷的检查功能,例如敞开式设备的瓷瓶有裂纹,设备渗漏油等情况;有些设备位置比较特殊,机器人无法进行巡视;
(2) 巡检路面需平坦,若路面上有凹陷、凸起、坑洞或者障碍物,机器人会因无法越障而停止工作,进而影响整体进程;
(3) 在雨雾冰雪等不良天气条件下,设备的能见度将降低,机器人系统在对设备的可见光拍摄效果方面将受到一定的影响。
针对以上造成机器人无法巡视或者巡视质量降低的情况,都需要配合人工巡视来完善。因此,机器人厂家应加强巡检系统应对特殊气象条件的检测能力以及避开障碍物的智能性。目前,大多的机器人巡检系统还是单机模式。为便于远程调阅设备的巡检数据及测温图片,该系统可以通过添加后台数据模块的方式,接入电力系统生产管理系统(PMS),以增强上级部门对站端设备的总体把控能力。
[1] 蔚 然,戚 琳,戚 矛. 智能机器人巡检系统在500 kV文都变的应用[J]. 电工技术,2014(6):9-11. WEI Ran, QI Lin. Application of intelligent robot inspection system in 500 kV Wendu Substation[J]. Electric Engineering,2014(6):9-11.
[2] TAKAHASHI H. Development of patrolling robot for substation[J]. Japan IERE Council. Special Document R-8903,1989(10):19.
[3] WANG T B,WANG H P,QI H,et al. The humanoid substation inspection robot modelling design[J]. Applied Mechanics & Materials,2013(365/366):771-774.
[4] 杨旭东,黄玉柱,李继刚,等. 变电站巡检机器人研究现状综述[J]. 山东电力技术,2015,42(1):30-34. YANG Xudong,HUANG Yuzhu,LI Jigang,et al. Research status review of robots applied in substations for equipment inspection[J]. Shandong Electric Power,2015,42(1):30-34.
[5] 鲁守银,张 营,李建祥,等. 移动机器人在高压变电站中的应用[J]. 高电压技术,2017,43(1) :276-284. LU Shouyin,ZHANG Ying,LI Jianxiang,et al. Application of mobile robot in high voltage substation[J]. High Voltage Engineering,2017,43(1): 276-284.
[6] 陈 昊,吴 健,王 斌. 户外电力设备GIS检修间的研制[J]. 中国设备工程,2014(7):51-53. CHEN Hao,WU Jian,WANG Bin, Development of outdoor power device GIS maintenance room [J]. China Plant Engineering,2014(7):51-53.
[7] SAWADA J,KUSUMOTO K,MUNAKATA T. A mobile robot for inspection of power transmission lines[J]. IEEE Transactions on Power Delivery,1991,01(6):309-315.
[8] 陈 昊,王玉荣. 检修专业新进员工培训新模式探索[J]. 中国电力教育,2014(1):205,227. CHEN Hao,WANG Yurong. Exploration of novel training mode for new maintenance employees [J]. China Electric Power Education,2014(1):205,227.
[9] 陈 昊,郭湘奇,田 涛,等. 隔离开关闭锁回路电子档案构建及应用[J]. 中国电力,2012,45(7) :20-23. CHEN Hao, GUO Xiangqi,TIAN Tao, et al. Establishment and implementation of electronic archives for block circuit of isolation switches [J]. Electric Power,2012,45(7) :20-23.
[10] 国家电网公司. 特高压交流变电站运维管理规定[M]. 北京:中国电力出版社,2006. State Grid Coporation of China. Ultral high voltage AC substation operation maintenance manegement regulation[M]. Beijing:China Electric Power Press,2006.
[11] 王金钗. 变电站巡检机器人磁导航系统设计与实现[D]. 成都:西南交通大学,2015. WANG Jinchai. The design of magnetic navigation system for substation inpection robot[D]. Chengdu: Southwest Jiaotong University,2015.
[12] 魏 苇. 基于差分 GPS 的变电站巡检机器人定位导航系统的研究[D]. 哈尔滨:哈尔滨工业大学,2015. WEI Wei. The location and navigation system of substation inspection robot based on RTK GPS[D]. Harbin: Harbin Institute of Technology,2015.
[13] 肖 鹏,栾贻青,郭 锐. 变电站智能巡检机器人激光导航系统研究[J]. 自动化与仪表,2012(5):5-9. XIAO Peng,LUAN Yiqing,GUO Rui. Research of the laser navigation system for the intelligent patrol robot[J]. Automation & Instrumentation,2012(5):5-9.
[14] 谭富民. 无人值班变电站巡检机器人的研究及应用[D]. 长沙: 长沙理工大学,2014. TAN Fumin. Research and application of the inspecting robot in the unattended operation substation[D]. Changsha: Changsha University of Science & Technology,2014.
[15] 毛琛琳,张功望,刘 毅. 智能机器人巡检系统在变电站中的应用[J]. 电网与清洁能源,2009,25(9):30-33.
MAO Tanlin,ZHANG Gongwang,LIU Yi. Application of intelligent robot iterative inspection system in substation[J]. Power System and Clean Energy,2009,25(9):30-33.
[16] 彭 晋. 智能巡检机器人系统在750 kV变电站的应用[D]. 保定:华北电力大学,2014. PENG Jin. Application & control reception of intelligent robot iterative inspection system in 750 kV substatio[D]. Baoding: North China Electric Power University,2014.
[17] 丁思奎,李 健. 变电站巡检机器人应用中存在的问题分析及解决方案[J]. 电工电气,2016(2):57-58. DIN Sikui,LI Jian. The problems existing in the substation inspection robot application analysis and solution[J]. Electrotechnics Electric,2016(2):57-58.
(编辑 徐林菊)
Intelligent Robot Inspection System Based on Laser Navigation in UHV Substation
GUO Yang, CHEN Hao
(State Grid Jiangsu Electric Power Company Maintenance Branch Company, Nanjing 210010, China)
Compared with the robot navigation mode, an intelligent robot inspection system for substation based on laser navigation technology is introduced to meet the new requirements of UHV substation equipment inspection. The structure function definitions, task execution of the system are discussed. The result of taking visible light picture, reading instruments data, detecting infrared thermal image by robot are compared with traditional inspection result. The practical results indicated that the inspection system can adapt the UHV substation circumstances which have numerous equipments and complex structure. Owing to long time endurance and accurate detection method, this system guarantees the reliability of equipment inspection, and provides strong support for daily operation and maintenance management of UHV substation. Finally, suggestions and improvement measures on robot system operation are provided.
laser navigation; intelligentrobot; inspection; UHV
2017-02-08;
2017-03-27
TM769
A
2096-3203(2017)04-0125-06

郭 杨
郭 杨(1986—),男,四川成都人,工程师,研究方向为电力系统自动化(E-mial:guoyang53436932@163.com);
陈 昊(1980—),男,江苏南京人,研究员级高级工程师,研究方向为电力系统继电保护(E-mial:pingfengma@126.com)。
猜你喜欢
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
石油化工建设(2019年4期)2019-10-10
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
电子制作(2017年8期)2017-06-05
电子制作(2016年21期)2016-05-17
通信电源技术(2016年3期)2016-03-26
现代企业(2015年6期)2015-02-28
西安建筑科技大学学报(自然科学版)(2014年2期)2014-11-12
