
空间机械臂捕获失稳目标的动态轨迹规划方法
2017-08-11 23:16:44王兴龙周志成曲广吉
宇航学报 2017年7期
王兴龙,周志成,曲广吉
(中国空间技术研究院通信卫星事业部,北京 100094)
空间机械臂捕获失稳目标的动态轨迹规划方法
王兴龙,周志成,曲广吉
(中国空间技术研究院通信卫星事业部,北京 100094)
针对航天器在轨服务体系技术的发展需求,提出一种空间机械臂捕获失稳目标的动态轨迹规划方法。在系统设定和工程模化的基础上,首先推导了空间机械臂捕获目标的动力学模型和速度增益矩阵;然后重点研究了速度增益矩阵的动态调整方法,并以此为基础设计了空间机械臂捕获失稳目标的动态轨迹规划方法;最后通过工程算例在MATLAB和ADAMS联合仿真平台上验证了该方法的有效性。仿真结果表明,该方法既能有效减少捕获时间,又能防止过大的起始和残余速度,同时还能回避雅克比矩阵奇异问题,可以满足机械臂末端对失稳目标相对位姿同步跟踪的捕获任务要求,具有工程实用性。
空间机械臂;目标捕获;速度增益;轨迹规划
0 引 言
空间机械臂技术[1-2]是航天器在轨服务体系的核心技术之一[3]。服务卫星通过空间机械臂完成对失稳目标卫星的捕获连接,在此基础上进一步进行故障修复等在轨服务操作。对于GEO通信卫星等大型卫星平台,姿态失稳后因其残余角速度和扰动等因素使卫星处于慢旋或翻滚状态,机械臂捕获操作存在捕获窗口且时间限制较紧。
对于该类失稳目标的捕获任务,空间机械臂如何在尽可能短的时间内实现其末端对目标的相对位姿同步跟踪,同时保证一定的跟踪精度成为一项亟待解决的关键技术问题。Nagamatsu等[4]提出了一种通过空间机械臂救援翻滚卫星的捕获策略,但在捕获前要求服务星保持与目标星同步旋转,对服务星姿态控制要求较高。洪炳熔等[5]采用分解运动速度控制提出了空间机器人捕捉运动目标的力矩控制算法,在平滑捕获目标的同时保持基座稳定,但对捕获过程中的轨迹规划问题未作深入研究。赵晓东等[6]采用多项式差值方法进行空间机械臂轨迹规划,但其本质是一种开环控制方法,且需假设目标的运动轨迹已知。韩艳铧[7]在非惯性系下建立了机械臂抓取目标的动力学模型,设计寻的制导控制律完成目标捕获,但未考虑“规划+控制”模式下非惯性系对目标捕获动力学与控制的影响。
空间机械臂利用视觉反馈获取其末端与失稳目标之间的相对位置和姿态信息,以此为基础规划相对速度和角速度。在以往研究中[8-9],速度增益矩阵通常为常值,虽算法简单,但无法同时满足平滑启动、捕获时间和跟踪精度等多方面要求。为避免机械臂启动时相对位姿误差较大可能导致的关节角速度过大问题,徐拴锋等[10]和徐文福等[11]分别采用位姿误差反馈系数和三次多项式对速度增益矩阵进行调整,但都未考虑中间阶段捕获时间限制,也未考虑临近捕获时相对位置和速度误差同时收敛问题。
本文提出一种空间机械臂捕获失稳目标的动态轨迹规划方法。建立系统动力学模型并分析常值速度增益矩阵存在的问题,采用线性规划对速度增益矩阵和关节角速度进行实时计算和动态调整,进而设计机械臂捕获目标的动态轨迹规划方法。最后通过仿真校验,检验该方法的有效性,并对其优缺点进行分析。
1 空间机械臂捕获失稳目标动力学建模
1.1 系统设定和符号定义
首先建立空间机械臂捕获失稳目标的动力学模型,并由此导出速度增益矩阵。根据工程模化思想,对论文所研究的系统工况设定如下:

图1 空间机械臂捕获目标示意图Fig.1 Illustration of space manipulator for capturing a target
如图1所示,整个系统包括服务星和目标星两颗卫星,服务星装有空间机械臂,目标星装有捕获接口。目标星处于失稳状态,在内部能量耗散作用下绕自身最大惯量轴慢旋,捕获接口随星体作旋转运动。服务星悬停于目标星-V-bar方向,相对距离小于5 m,目标星捕获接口的运动轨迹与机械臂工作空间相交。服务星姿轨控系统正常工作,空间机械臂工作在基座位姿受控模式。
根据相对位姿测量信息,实时规划空间机械臂的运动轨迹,实现机械臂末端对捕获接口的相对位姿同步跟踪,以减小捕获时的碰撞冲击。动力学建模所用坐标系和基本符号定义如表1所示,文中所有矢量均用其在惯性系I中的坐标分量表示。

表1 动力学建模基本符号
1.2 动力学模型和速度增益矩阵

(1)
式中:Js∈R6×6为服务星运动相关的雅克比矩阵,Jm∈R6×n为机械臂运动相关的雅克比矩阵。
传统目标捕获轨迹规划方法中[9],空间机械臂末端的期望速度ved和期望角速度ωed按下式规划
(2)

(3)
(4)
式(2)中,K∈R6×6称为速度增益矩阵,一般取正常值对角阵,且可以写成如下形式
(5)
式中:Kv=diag(kv,kv,kv),Kω=diag(kω,kω,kω)分别为线速度和角速度增益矩阵,对角线元素取值相等是为保证相对速度始终沿相对位置的直线方向。

(6)



2 速度增益矩阵动态调整方法
设空间机械臂关节角速度的上下限分别为
(7)

(8)
式中:
(9)
将K(t)写成式(5)所示形式,同时令
(10)
式中:ri(t),oi(t),Vi(t)∈R,Ji(t)∈R1×n。可将式(8)写成展开形式
(11)
(12))
(13)

(kv(t)+kω(t))
(14)
线性规划的目标函数Q可取为
(15)
式中:ηv和ηω分别为线速度和角速度的权重系数,用以调节规划结果中kv(t)和kω(t)的权重。

设空间机械臂对失稳目标捕获操作的初始时刻t0=0,在结束时刻tf,其相对的位置、姿态、速度和角速度误差的精度要求分别为
(16)
将整个捕获过程[0,tf]分为三个阶段:1)平滑启动阶段[0,t1),机械臂关节平滑启动,使其末端速度从初值递增至沿相对直线方向所能达到的最大值;2)快速逼近阶段[t1,t2),机械臂末端以最大速度快速逼近目标,以尽可能减少捕获时间;3)临近捕获阶段[t2,tf],机械臂减速,使相对位姿和速度误差在结束时刻tf同时收敛至指定精度。

(17)

1)初始时刻

2)平滑启动阶段

(18)
3)快速逼近阶段
(19)
4)临近捕获阶段
结束时刻tf,根据位置级和速度级相对误差同时收敛至指定精度的要求,令
(20)
则K在结束时刻tf的取值要求K(tf)为
(21)
式中:Kvf=diag(kvf,kvf,kvf),Kωf=diag(kωf,kωf,kωf)。

(22)
(23)

3 机械臂捕获目标的动态轨迹规划方法
基于速度增益矩阵动态调整方法,空间机械臂捕获失稳目标的动态轨迹规划方法如图2所示。
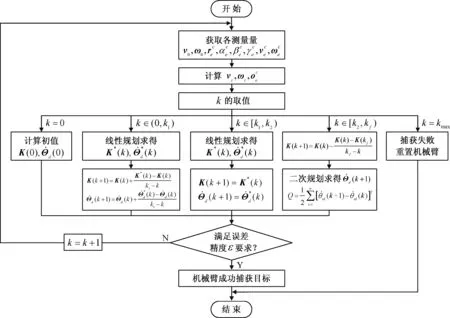
图2 空间机械臂捕获失稳目标的动态轨迹规划方法流程图Fig.2 Flow chart of dynamic trajectory planning method of space manipulator for capturing a tumbling target
动态轨迹规划方法具体步骤如下:

步骤6:若k=kmax,表明循环次数已到达规定的最大值,始终无法满足捕获条件,捕获任务失败,重置空间机械臂,结束当前捕获操作。

步骤8:若是,表明已实现机械臂末端对失稳目标的相对位姿同步跟踪,发出指令使机械臂成功捕获目标,令kf=k,捕获任务结束。
4 仿真校验
4.1 工程算例
通过工程算例在MATLAB和ADAMS联合仿真平台上进行仿真,校验本文轨迹规划方法的有效性。服务星和目标星设定采用某成熟型号卫星平台。机械臂设定为空间7自由度机械臂,整体构型与国际空间站遥控机械臂系统相同。空间机械臂坐标系采用传统D-H建模方法,如图3所示。D-H参数如表2所示,动力学参数如表3所示。空间机械臂末端坐标系e与臂杆坐标系7重合。
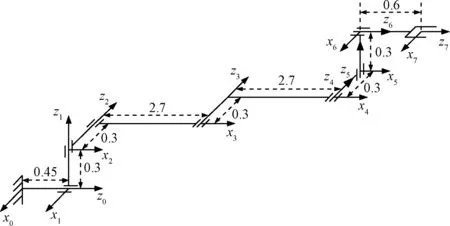
图3 空间7自由度机械臂D-H坐标系Fig.3 D-H frames of 7-dof space manipulator
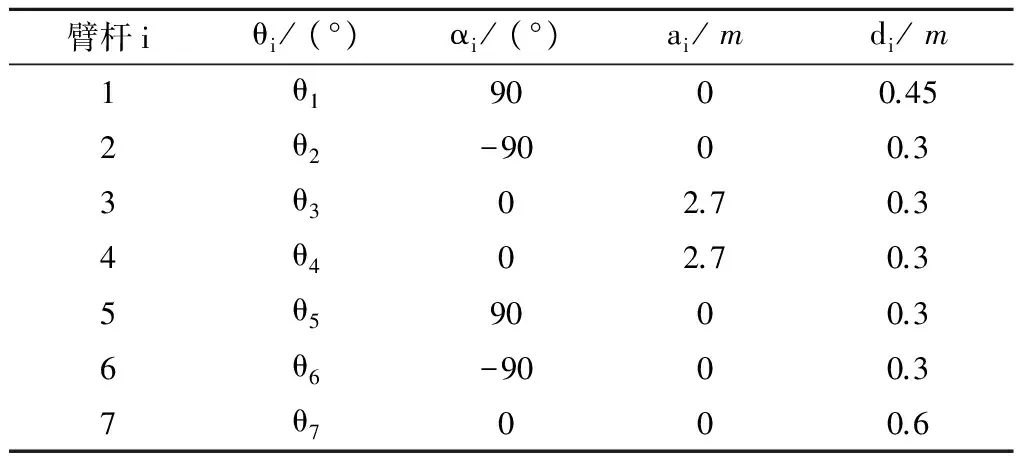
臂杆iθi/(°)αi/(°)ai/mdi/m1θ19000.452θ2-9000.33θ302.70.34θ402.70.35θ59000.36θ6-9000.37θ7000.6

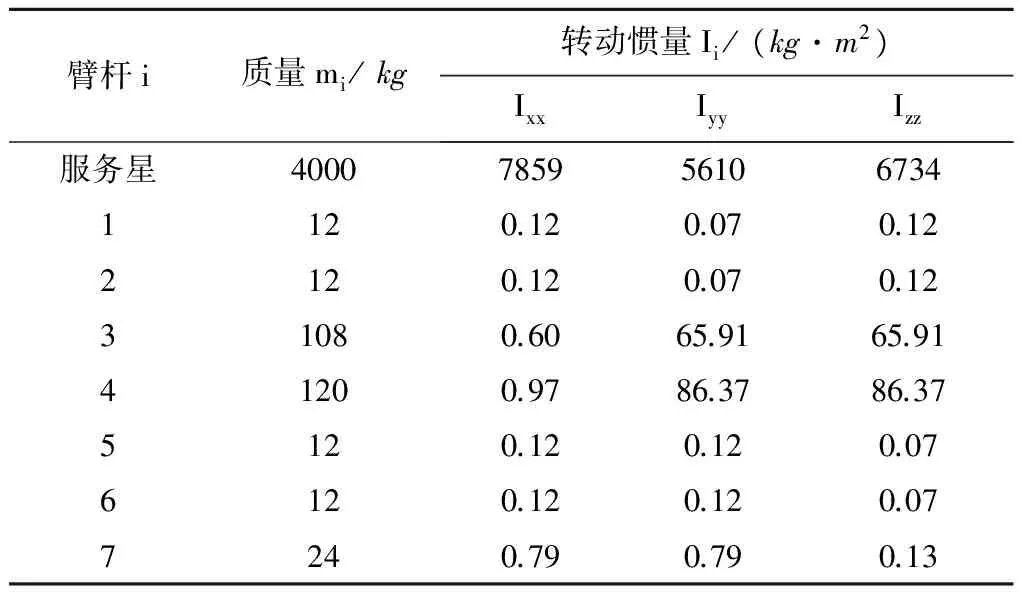
表3 空间机械臂动力学参数
4.2 仿真结果
MATLAB与ADAMS联合仿真得到的线速度增益矩阵Kv曲线和角速度增益矩阵Kω曲线分别如图4和图5所示。从图4~5可以看出,速度增益矩阵Kv和Kω的变化曲线明显呈三个阶段。平滑启动阶段,从初值近似呈线性递增;快速逼近阶段,按当前方向的最大值快速增加;临近捕获阶段,线性递减,在捕获结束时刻(tf=16 s)减为指定值Kvf和Kωf。
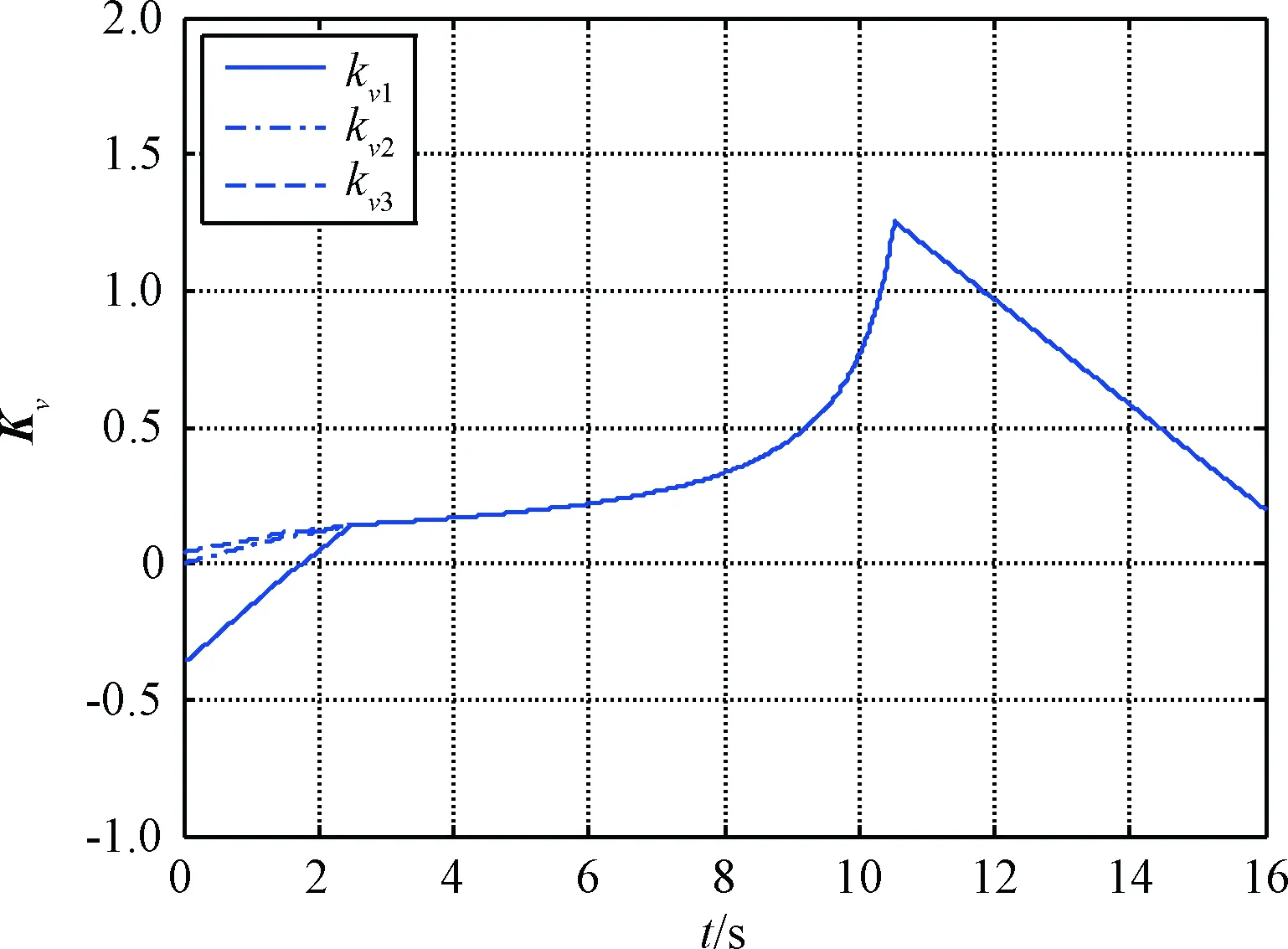
图4 线速度增益矩阵曲线Fig.4 Curves of linear velocity gain matrix
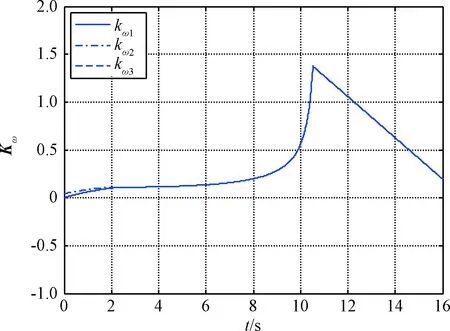
图5 角速度增益矩阵曲线Fig.5 Curves of angular velocity gain matrix

图6 空间机械臂关节角度曲线Fig.6 Curves of joint angle of space manipulator
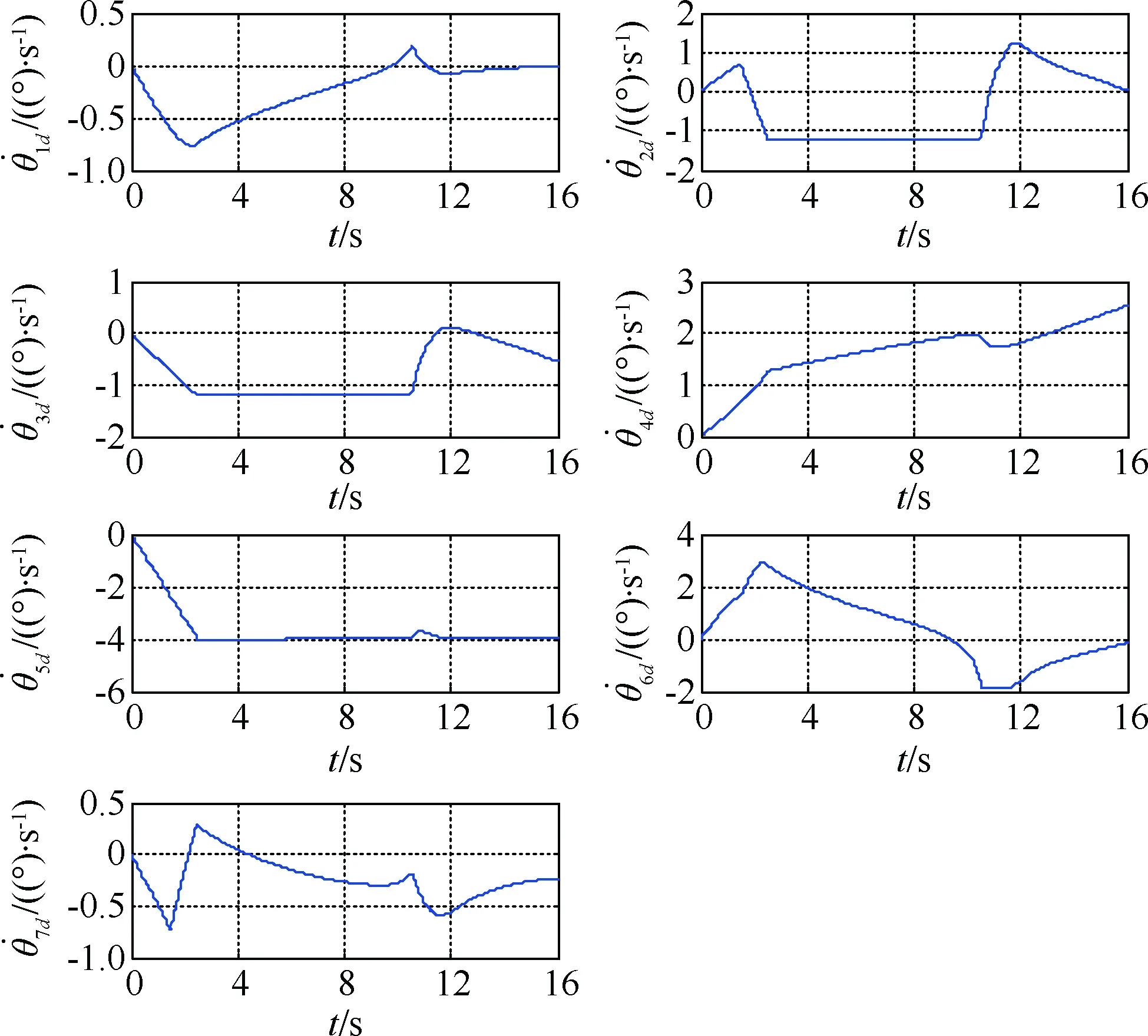
图7 空间机械臂关节角速度曲线Fig.7 Curves of joint angular velocity of space manipulator
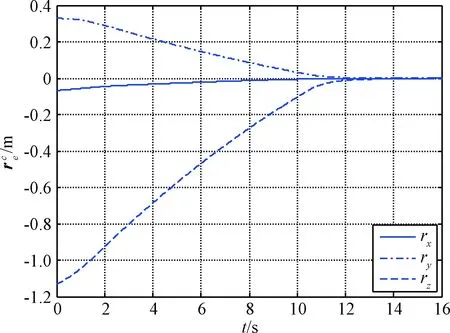
图8 相对位置误差曲线Fig.8 Curves of relative position error
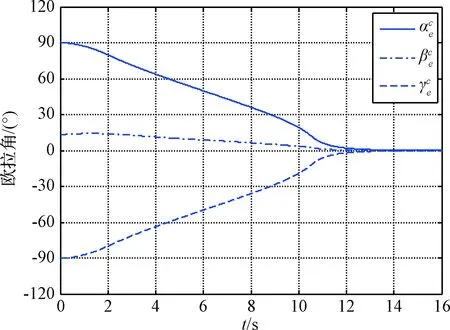
图9 相对姿态误差曲线Fig.9 Curves of relative attitude error

图10 相对线速度误差曲线Fig.10 Curves of relative linear velocity error
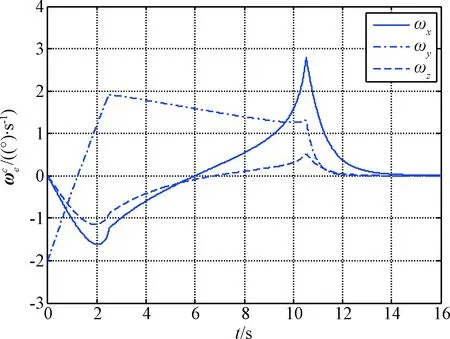
图11 相对角速度误差曲线Fig.11 Curves of relative angular velocity error
5 结 论
本文针对空间机械臂捕获失稳目标问题,提出一种动态轨迹规划方法。仿真结果表明,该方法有效可行,能够满足机械臂末端对失稳目标相对位姿同步跟踪的捕获任务要求。该方法具有以下特点:1)能够使机械臂快速逼近失稳目标,有效减少捕获时间;2)保证机械臂平滑启动,避免起始速度过大问题;3)保证位置级和速度级相对误差同时收敛至指定精度,避免残余速度过大问题;4)避免逆运动学计算,有效解决雅克比矩阵奇异问题。
应指出,该方法还存在一定问题,如计算量较大,目标跟踪时延较长;速度曲线不够光滑,阶段转换处变化较为剧烈,容易引起较大的跟踪误差等,需进一步研究解决。本文研究结果可为空间机械臂捕获失稳目标的工程实施提供一定的理论参考。
[1] 周志成, 曲广吉. 通信卫星总体设计和动力学分析[M]. 北京:中国科学技术出版社, 2012.
[2] 于登云, 孙京, 马兴瑞. 空间机械臂技术及发展建议[J]. 航天器工程, 2007, 16(4): 1-8. [YuDeng-yun,SunJing,MaXing-rui.SuggestionondevelopmentofChinesespacemanipulatortechnology[J].SpacecraftEngineering, 2007, 16(4): 1-8.]
[3] 梁斌, 徐文福, 李成, 等. 地球静止轨道在轨服务技术研究现状与发展趋势[J]. 宇航学报, 2010, 31(1): 1-13. [LiangBin,XuWen-fu,LiCheng,etal.Thestatusandprospectoforbitalservicinginthegeostationaryorbit[J].JournalofAstronautics, 2010, 31(1): 1-13.]
[4]NagamatsuH,KubotaT,NakataniI.Capturestrategyforretrievalofatumblingsatellitebyaspaceroboticmanipulator[C].InternationalConferenceonRoboticsandAutomation,Minneapolis,USA,April28-30, 1996.
[5] 洪炳熔, 柳长安, 李华忠. 自由飞行空间机器人捕捉运动目标的力矩控制算法及其仿真[J]. 宇航学报, 2000, 21(4): 64-69. [HongBing-rong,LiuChang-an,LiHua-zhong.Torquecontrolalgorithmforfreeflyingspacerobotscapturingamovingtargetanditssimulation[J].JournalofAstronautics, 2000, 21(4): 64-69.]
[6] 赵晓东, 王树国, 严艳军, 等. 基于轨迹规划的自由漂浮空间机器人抓取运动物体的研究[J]. 宇航学报, 2002, 23(3): 48-51. [ZhaoXiao-dong,WangShu-guo,YanYan-jun,etal.Algorithmofcapturingatamovingbodyforafree-floatingspacemanipulatorbasedontrajectoryplanning[J].JournalofAstronautics, 2002, 23(3): 48-51.]
[7] 韩艳铧. 空间机械臂抓取目标动力学与寻的制导控制[J]. 宇航学报, 2016, 37(9): 1098-1106. [HanYan-hua.Dynamicsandhomingguidanceforspacemanipulatorcapturingon-orbittarget[J].JournalofAstronautics, 2016, 37(9): 1098-1106.]
[8]InabaN,OdaM,HayashiM.Visualservoingofspacerobotforautonomoussatellitecapture[J].JapanSocietyofAeronauticalSpaceSciencesTransactions, 2004, 46(153): 173-179.
[9] 徐文福. 空间机器人目标捕获的路径规划与实验研究[D]. 哈尔滨:哈尔滨工业大学, 2007. [XuWen-fu.Pathplanningandexperimentstudyofspacerobotfortargetcapturing[D].Harbin:HarbinInstituteofTechnology, 2007.]
[10] 徐拴锋, 杨保华, 张笃周, 等. 面向非合作目标抓捕的机械臂轨迹规划方法[J]. 中国空间科学技术, 2014, 8(4): 8-15. [XuShuan-feng,YangBao-hua,ZhangDu-zhou,etal.Trajectoryplanningalgorithmformanipulatorscapturingnon-cooperativeobjects[J].ChineseSpaceScienceandTechnology, 2014, 8(4): 8-15.]
[11] 徐文福, 李成, 梁斌, 等. 空间机器人捕获运动目标的协调规划与控制方法[J]. 自动化学报, 2009, 35(9): 1216-1225. [XuWen-fu,LiCheng,LiangBin,etal.Coordinatedplanningandcontrolmethodofspacerobotforcapturingmovingtarget[J].ActaAutomaticaSinica, 2009, 35(9): 1216-1225.]
通信地址:北京市5142信箱317分箱(100094)
电话:13811616124
E-mail:wangxinglong1987@163.com
Dynamic Trajectory Planning Method of Space Manipulator for Capturing a Tumbling Target
WANG Xing-long, ZHOU Zhi-cheng, QU Guang-ji
(Institute of Telecommunication Satellite, China Academy of Space Technology, Beijing 100094, China)
In order to meet the development requirement of spacecraft on-orbit service system technology, a dynamic trajectory planning method of a space manipulator for capturing a tumbling target is proposed in this paper. Firstly, on the basis of the system assumptions, the dynamics model and the velocity gain matrix of the space manipulator for capturing a target are derived. Then, the dynamic regulation method of the velocity gain matrix is presented. Furthermore, the dynamic trajectory planning method of the space manipulator is developed in detail. Finally, the effectiveness of the method is verified by a numerical simulation performed with MATLAB and ADAMS. The results illustrate that the proposed method can not only reduce the capturing time but also prevent the excessive starting and residual velocities, as well as avoiding the singularity of the Jacobian matrix. The method is practical in engineering for a space manipulator to capture a tumbling target.
Space manipulator; Target capturing; Velocity gain; Trajectory planning
2016-11-16;
2017-05-04
国家自然科学基金(11272334)
TP241
A
1000-1328(2017)07-0678-08
10.3873/j.issn.1000-1328.2017.07.000
王兴龙(1987-),男,博士生,主要从事航天器总体设计、航天器动力学与控制等研究。
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20 07:23:56
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
电子制作(2019年19期)2019-11-23 08:41:36
电子制作(2018年19期)2018-11-14 02:37:02
现代装饰(2018年5期)2018-05-26 09:09:39
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
中国三峡(2017年2期)2017-06-09 08:15:29
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国铁道科学(2015年4期)2015-06-21 06:46:06
