
模糊滑模控制和负载转矩补偿的异步电动机直接转矩控制
2017-08-09 01:34杨本臣和敬祥
传感器与微系统 2017年7期
杨本臣, 和敬祥, 曹 留
(辽宁工程技术大学 电气与控制工程学院,辽宁 葫芦岛 125105)
模糊滑模控制和负载转矩补偿的异步电动机直接转矩控制
杨本臣, 和敬祥, 曹 留
(辽宁工程技术大学 电气与控制工程学院,辽宁 葫芦岛 125105)
针对异步电动机(IM)转矩脉动以及抗干扰能力差的问题,设计了基于模糊滑模控制(FSMC)与负载转矩补偿的新型直接转矩控制(DTC),取代传统PID速度调节器的是一种滑模控制器。为解决滑模控制器中负载转矩脉动的问题,用模糊逻辑控制器取代了传统滑模控制律中的不连续部分,可以明显降低异步电动机在低速运转时的转矩脉动。提出了一种负载转矩观测器来估计未知的负载转矩。负载转矩观测器用来估计负载转矩扰动,估计作为速度环的前馈补偿。仿真结果表明:在低速负载转矩扰动时,该设计具有更好的动态响应和速度性能、更高鲁棒性和更强的抗干扰能力。
异步电动机; 直接转矩控制; 模糊滑模控制; 负载转矩观测
0 引 言
异步电动机(IM)因其结构简单、维护成本低、效率高和可靠性强等诸多优点,被广泛应用于工业生产领域。然而,由于受未知参数变化与外部负载扰动的影响,严重降低了IM的控制性能。直接转矩控制(DTC)[1,2]是使用最广泛的控制策略之一,具有快速的动态响应和很强的鲁棒性。但在IM稳定运行状态时,DTC具有明显的转矩和磁链脉动。因此,许多研究学者们做了大量工作以减少转矩脉动[3~8]。文献[4]提出了基于模糊逻辑控制(FLC)的IM的位置控制,具有抗干扰能力强的优点,但是存在很难消除系统稳态误差和控制精度不高的缺陷。人工神经网络(ANN)[5]具有计算速度快和自适应、自组织、自学习能力。
然而,复杂的算法使其应用起来很有局限性。滑模控制(SMC)[6]算法简单、对系统不确定性不敏感,但抖振现象[7]限制了其应用。另一方面,在文献[8]中,一种负载转矩观测器被应用于估计负载转矩,负载转矩观测器可以提高IM的抗干扰能力。
本文将模糊滑模控制器(FSMC)用于减少IM的转矩脉动,基于滑模控制的负载转矩观测器被作为速度环的前馈补偿。通过在Matlab/Simulink仿真环境下进行了模拟,证实了控制策略的快速性与有效性。
1 异步电动机数学模型
在文献[9]的基础上,三相鼠笼式IM在α-β静止坐标系中的数学模型如下
(1)

IM的转子速度为
(2)
式中 τ为电磁转矩。
IM的转矩表达式为
τ=npLm(isβirα-isαirβ)=np(λsαisβ-λsβisα)
(3)
式中 irα,irβ分别为α轴和β轴的转子电流。
2 模糊滑模控制和负载转矩补偿的直接转矩控制

传统的直接转矩控制系统不再重复介绍,请参阅文献[11]。

图1 基于模糊逻辑控制与负载转矩补偿的直接转矩控制原理
3 模糊滑模控制和负载转矩观测器设计
3.1 模糊滑模控制器设计
速度误差定义为
e=ω*-ω
(4)
选择如下滑模面

(5)
设计滑模控制器
(6)
式中 符号sgn(s)定义为
(7)
k越小,抖动越小。然而,控制系统的轨迹到达滑模面需要经历很长时间,因此控制器的参数设置是非常重要的。为了获得较小抖振和快速到达滑模面,模糊逻辑控制器的设计是本文的重大意义。
模糊逻辑控制器的输入变量为速度错误e,输出变量为k(Δk)。选择模糊集e和Δk作为{负大,负,零,正,正大}。e和Δk的隶属度和 {-1,1}。采用的模糊规则如表1所示。

表1 模糊规则
模糊逻辑控制器的输出为
k~=k0+Δk,k~>0
(8)
式中k0为模糊逻辑控制器的初始值。
模糊滑模控制器为
(9)
定义李雅普诺夫函数为
(10)
从式(2)、式(5)、式(6)、式(10)可以得到

=-k~|s|≤0
(11)
3.2 负载转矩观测器设计

(12)
从式(1)可以得出
(13)
负载转矩观测器可以设计为
(14)
式中 k1,k2为控制器设计的参数。
由式(13),式(14)可以得到

(15)
当k1>0,k2>0,根据劳斯判据,可知观测器是渐渐稳定的。可以得出前馈补偿后的负载转矩为
4 仿真结果分析
仿真系统的参数如下:异步电动机的额定功率为1.5kW;额定电压为220V;额定电流为3.4A;参考转速为1 000r/min;极对数为np=2;定子电阻Rs=1.125Ω;定子电感和转子电感Ls=Lr=0.009H;Rr=2.084Ω;定转子互电感Lm=0.403 5H;转动惯量J=0.02kg·m2。仿真结果如图2~图6所示。

图2 基于模糊滑模和负载转矩观测器的直接转矩控制速度响应

图3 图2中速度响应缩放图

图4 负载转矩观测
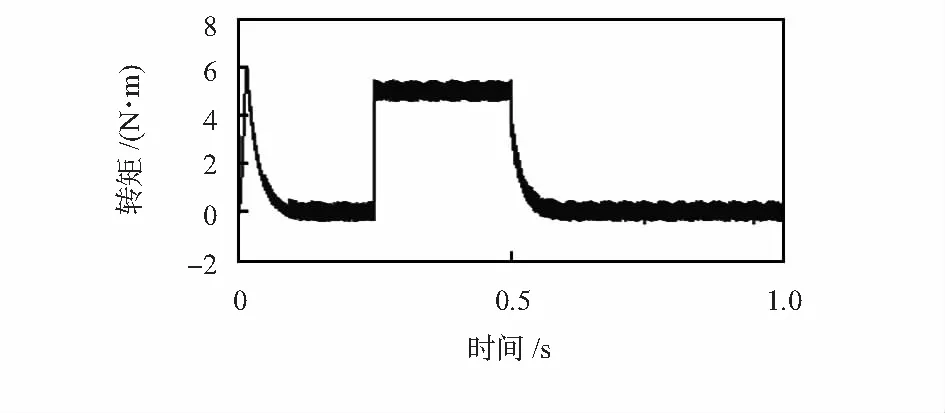
图5 传统直接转矩控制下的转矩响应

图6 基于模糊滑模控制器的直接转矩控制的转矩响应
图2显示了基于模糊滑模控制与负载转矩观测器的直接转矩控制的速度响应,即在启动阶段,t=0.5 s从1 000 r/min;升至1 100 r/min;的速度阶跃变化。图3是基于模糊滑模控制与负载转矩观测器的直接转矩控制与无负载转矩观测器在t=0.25 s的缩放视图。从图2、图3可以看出:基于模糊滑模控制与负载转矩观测器的直接转矩控制系统比传统的直接转矩控制具有更好的快速性和更强的抗干扰能力。
5 结 论
基于IM直接转矩控制方案,设计了模糊滑模控制器,以降低IM转矩脉动和提高抗干扰能力。另外,负载转矩观测器用于估计外部负载转矩的前馈补偿。仿真结果表明:基于模糊滑模控制与负载转矩观测器的直接转矩控制方案具有非常良好的快速性和抗干扰能力,而且明显地减少了系统的转矩脉动。
[1] Kaboli S,Vahdati-Khajeh E,Zolghadri M R.Probabilistic voltage harmonic analysis of direct torque controlled induction motor drives[J].IEEE Transactions on Power Electronics,2006,21(4):1041-1052.
[2] Cruz S M A,Cardoso A J M.Diagnosis of stator inter-turn short circuits in DTC induction motor drives[J].IEEE Transactions on Industry Applications,2004,40(5):1349-1360.
[3] 吴召剑,吴定祥,龚金成,等.基于弹性联轴器形变量检测的电机扭矩测试系统[J].传感器与微系统,2016,35(4):116-118,122.
[4] Fnaiech M A,Betin F,Capolino G A,et al.Fuzzy logic and sli-ding-mode controls applied to six-phase induction machine with open phases[J].IEEE Transactions on Industrial Electronics,2010,57(1):354-364.
[5] Pajchrowski T,Zawirski K.Application of artificial neural network to robust speed control of servodrive[J].IEEE Transactions on Industrial Electronics,2007,54(1):200-207.
[6] Liutanakul P,Pierfederici S,Meibody-Tabar F.Application of SMC with I/O feedback linearization to the control of the cascade controlled-rectifier/inverter-motor drive system with small DC-link capacitor[J].IEEE Transactions on Power Electronics,2008,23(5):2489-2499.
[7]Rong-JongW.Fuzzysliding-modecontrolusingadaptivetuningtechnique[J].IEEETransactionsonIndustrialElectronics,2007,54(1):586-594.
[8]DiGennaroS,RiveraDominguezJ,MezaMA.Sensorlesshighorderslidingmodecontrolofinductionmotorswithcoreloss[J].IEEETransactionsonIndustrialElectronics,2014,61(6):2678-2689.
[9]YazdanpanahR,SoltaniJ,ArabMarkadehGR.Nonlineartorqueandstatorfluxcontrollerforinductionmotordrivebasedonadaptiveinput-outputfeedbacklinearizationandslidingmodecontrol[J].EnergyConversionandManagement,2008,49(4):541-550.
[10] 胡正高,赵国荣,马合宝.基于奇异观测器的连续系统传感器故障估计[J].传感器与微系统,2015,34(9):48-50,57.
[11]KaboliS,ZolghadriMR,Vahdati-KhajehE.AfastfluxsearchcontrollerforDTC-basedinductionmotordrives[J].IEEETran-sactionsonIndustrialElectronics,2007,54(5):2407-2416.
Induction motor DTC based on fuzzy sliding mode control with load torque compensation
YANG Ben-chen, HE Jing-xiang, CAO Liu
(Faculty of Electrical & Control Engineering,Liaoning Technical University,Huludao 125105,China)
Aiming at problem of torque ripple and bad anti-interference capability of induction motor(IM),a novel direct torque control(DTC)based on fuzzy sliding mode control(FSMC)with load torque compensation is designed.The conventional PID speed regulator is replaced by a sliding mode controller.To solve the problem of torque ripple of load in sliding mode controller,a fuzzy logic controller replaces the discontinuous part of the conventional sliding mode control law.It can obviously reduce the torque ripple of IM at low speed.In addition,a load torque observer is proposed to estimate the unknown load torque.The load torque observer is used to estimate load torque disturbances and the estimation is used as the feed-forward compensation in the speed loop.The simulation results show that the design has better dynamic response and speed performance,high robustness and strong anti-interference to load torque disturbance at low speed.
induction motor(IM); direct torque control(DTC); fuzzy sliding mode control(FSMC); load torque observer
10.13873/J.1000—9787(2017)07—0103—03
2016—06—08
TP 212
A
1000—9787(2017)07—0103—03
杨本臣(1975-),男,博士,副教授,从事无线传感器网络、异步电动机控制技术工作。
猜你喜欢
中国特种设备安全(2022年3期)2022-07-08
防爆电机(2020年4期)2020-12-14
中国高新技术企业(2017年5期)2017-05-05
科技与创新(2016年11期)2016-06-28
铁道科学与工程学报(2015年5期)2015-12-24
舰船科学技术(2015年8期)2015-02-27
数字技术与应用(2014年8期)2014-12-13
电测与仪表(2014年11期)2014-04-04
现代防御技术(2014年6期)2014-02-28
地震研究(2014年1期)2014-02-27
