
基于改进时间指针的相控阵雷达任务调度方法*
2017-08-09 01:34孙铭才袁俊超
传感器与微系统 2017年7期
孙铭才, 张 秦, 袁俊超
(空军工程大学 防空反导学院,陕西 西安 710051)
基于改进时间指针的相控阵雷达任务调度方法*
孙铭才, 张 秦, 袁俊超
(空军工程大学 防空反导学院,陕西 西安 710051)
针对相控阵雷达实时任务调度中时间资源利用不充分的问题,提出了一种基于改进时间指针的任务自适应调度方法。以时间指针为对象,从整个调度时间轴上所有满足时间指针处执行条件的任务请求中,选择一个优先级最高的任务作为当前时刻的执行任务,有效减少了空闲时间的浪费,使得相控阵雷达能够在有限时间资源内调度执行更多的任务。与基于传统时间指针的调度方法仿真对比,结果表明:方法提高了任务调度成功率和时间利用率,有效提升了相控阵雷达的整体调度性能,具有一定的优越性。
相控阵雷达; 时间指针; 时间资源; 任务调度
0 引 言
相控阵雷达具有灵活、快速的波束捷变和波束自适应能力,可以同时执行搜索、跟踪等多个任务[1~2]。随着现代战场环境日益复杂,相控阵雷达需执行的任务数量不断增多,要求相控阵雷达在有限的时间资源内尽可能多地执行任务,因此,需要对雷达任务调度方法进行合理设计,以实现时间资源有效利用,从而提升相控阵雷达的整体性能。
近年来,随着相控阵雷达技术的广泛应用,资源调度方法研究成为其中一个重要的研究方向。文献[3]将截止期最早最优先(earlist deadline first,EDF)算法引入到了相控阵雷达的任务调度过程中,即优先级高的任务最先被调度,在其可执行时间范围内尽量靠近其期望执行时间。文献[4,5]结合启发式规则将遗传算法引入到了相控阵雷达的任务调度过程中。文献[6,7]提出了基于二次规划的任务调度方法,利用对整体任务的二次规划获取最佳执行时间,使得雷达对任务的调度代价最小。上述调度方法实质是从任务的角度出发,根据任务选择执行时间,结果可能导致使被成功调度的任务之间存在空闲时间,从而造成时间资源浪费。文献[8,9]从时间的调度出发,提出基于时间指针的相控阵雷达任务调度方法,方法定义了时间指针,根据时间指针所指向的时刻,从指针所在调度间隔的申请任务中选择最适合在此时刻执行的任务,有效减少了任务之间的空闲时间,提升了雷达的调度性能。但是当相邻两个调度间隔的任务中,前一个调度间隔的任务较少,后一个调度间隔的任务较多时,其调度结果会使得前一个调度间隔中存在着空闲时间,而后一个调度间隔存在任务被延迟或删除的现象。文献[10~13]在上述调度算法的基础上,针对任务优先级的综合设计,提出了将任务工作方式、截止期以及目标属性互相结合的优先级设计方法。
上述文献中,相控阵雷达在对任务整个调度过程中均没有实现对时间的充分利用,存在时间资源浪费。针对这一问题,本文提出了一种基于改进时间指针的相控阵雷达任务调度方法,根据时间指针所指向的当前时刻,从整个调度时间轴上所有满足此时刻执行条件的任务请求中,选择一个优先级最高的任务作为当前的执行任务,有效减少了空闲时间的浪费,使得相控阵雷达能够在有限的时间资源内调度执行更多的任务。通过设定相控阵雷达的工作场景,对该方法进行了仿真,结果证明了其优越性。
1 任务建模
相控阵雷达须执行的任务主要有搜索、验证、跟踪以及失跟处理等。任务通过以下模型进行描述
qi={tei,Δti,wi,prii,Pi},i=1,2,3…
(1)
式中qi为为第i个任务;tei和Δti分别为每个任务的期望执行时刻和所需执行时间长度;wi为每个任务的时间窗,时间窗指任务实际执行时刻可以在其期望执行时刻前后移动的时间范围[14];prii和Pi分别为每个任务的工作方式优先级和综合优先级。设tfi为任务qi的最早可执行时刻,则tfi=tei-wi;设tli为任务qi的最晚可执行时刻,即截止期,则tli=tei+wi。
任务的综合优先级设计,主要由工作方式优先级和截止期决定[9]。任务的工作方式优先级越高,则越优先调度;任务的截止期越早,则越优先调度。任务的工作方式优先级与其本身类型有关,根据经验事先确定,用pri表示;任务的截止期与其时间窗和期望执行时刻有关,表示为tli=tei+wi。假设当前时刻有J个任务,对这J个任务分别按照工作方式优先级由高到低和截止期由小到大进行2次排序,记第j个任务qj在2次排序中的序号分别为Npj和Ndj。构建任务综合优先级函数
(2)
式中 η为倾向工作方式优先级的加权值,其取值范围是[1,J+1]。可以通过选取不同的权值η来增加或减小工作方式优先级对综合优先级的影响。
2 调度方法的原理与实现
2.1 调度方法的原理
对于传统时间指针调度方法,相控阵雷达在对时间指针所指向的时刻分析调度任务时,只是对时间指针所在调度间隔内的任务进行分析,从该调度间隔内满足当前执行条件的任务中,选择一个综合优先级最高的任务执行。在不同调度间隔任务不均衡的情况下,这种方法往往可能造成2种结果:当调度间隔内任务数较少时,会造成时间资源的空闲;而当调度间隔内任务数较多时,往往造成任务的延迟或删除。图1为时间轴上2个调度间隔共有8个任务请求的情况,其中调度间隔1的任务较少,调度间隔2的任务较多。传统时间指针调度方法对这些任务的调度结果如图2(a)所示,图2(a)中,2个调度间隔各自分析调度各自的任务,使得调度间隔1存在空闲时间没有被利用,而调度间隔2由于任务过多,导致任务8得不到调度。
在相控阵雷达对任务的调度执行过程中,任务在被雷达调度执行后,系统根据该任务回波信号的处理结果,产生后续任务,并且给出后续任务的执行参数,包括期望执行时刻、时间窗、执行时间长度以及工作方式优先级。所以,对于某一时刻,相控阵雷达在该时刻的整个调度时间轴上所有已产生的任务的执行参数均可知。因此,雷达在某时刻分析调度任务时,可以对整个调度时间轴上的任务进行分析,从所有满足此时刻执行条件的任务中,选择一个综合优先级最高的任务在此时刻执行。根据以上所述,利用改进时间指针调度方法对图1中的任务进行分析调度,得到如图2(b)所示的调度结果。图2(b)中,调度间隔2的任务4在调度间隔1中得到执行,使得调度间隔1的空闲时间减少,并且两个调度间隔的全部任务都能得到调度。

图1 任务请求

图2 两种方法调度结果对比
2.2 调度方法的具体步骤
假设某一个调度间隔(SI)起始时刻为to,结束时刻为tn=to+SI,tp为调度过程中的当前时刻,即为时间指针,Q=[q1,q2,…,qN]为tp时刻整个调度时间轴上所有任务请求形成的任务申请链表。任务的实时调度过程:
1)获得该调度间隔的起始时间指针tp,由于上一调度间隔中最后一个任务的调度执行可能占用了本调度间隔的时间,所以tp≥to。
2)取出任务申请链表Q中最晚可执行时刻小于tp的任务,送入删除链表。

5)检查任务申请链表Q是否为空,若空,转步骤(8);若非空,转步骤(6)。
6)若tp≥tn,转步骤(7);否则,转步骤(2)。
7)该调度间隔结束,得到该调度间隔的执行链表,并进入到下一个调度间隔的调度过程。
8)雷达工作完毕。
3 仿真试验与性能评估
3.1 性能评估指标
为了验证本文方法的优越性,采用以下评估指标进行性能评估:
1)调度成功率(schedule sccess ratio,SSR)
(3)
式中 Nsuc为成功调度任务总数;N为所有请求的任务总数。调度成功率用以表征方法对任务的调度执行情况,调度成功率越高,方法性能越佳。
2)时间利用率(timeutilizationratio,TUR)
(4)
式中 T为仿真时间长度。时间利用率用以表征方法对有限时间资源的占用情况,时间利用率越高,方法性能越佳。
3.2 仿真分析
对本文中的改进时间指针方法和传统时间指针方法[7]分别进行仿真,利用评估指标对仿真结果进行分析对比。除调度方法不同外,实验场景和仿真参数设置完全相同。
仿真参数:1)调度间隔为50ms,仿真时间为5s; 2)搜索任务在仿真开始均按其更新率周期产生,目标被随机搜索到;3)搜索检测到的目标经验证确定为有效目标后,进行跟踪,跟踪任务按其更新率产生;4)验证任务由两部分产生:目标验证与虚警;5)失跟处理任务在跟踪起始后随机产生;6)综合优先级设计中的权值η,设η=J/2+1,为综合优先级的设计均衡考虑工作方式优先级和截止期的影响。
仿真实验场景设置为:相控阵雷达对5~30批目标进行跟踪。任务的参数设置如表1所示。
对两种方法进行仿真,通过性能评估指标对其进行比较。图3为两种方法在不同数量目标下的任务调度成功率;图4为两种方法在不同数量目标下的时间利用率。

表1 任务参数设置
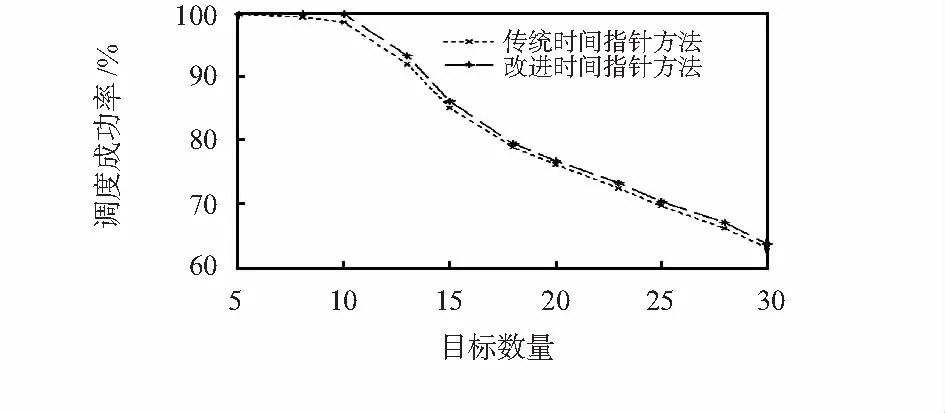
图3 任务调度成功率对比

图4 时间利用率对比
从图3和图4中可知,当目标数量为5时,两种方法的调度成功率均为100 %,表示都能够调度所有任务,且此时两种方法的时间利用率相同。当目标数量为8时,传统时间指针方法的调度成功率开始小于100 %,而改进时间指针方法的调度成功率仍然为100 %,并且改进时间指针方法的时间利用率开始大于传统时间指针方法。当目标数量为18时,改进时间指针方法的时间利用率开始等于100 %,说明此时整个调度时间轴上已无空闲时间。综合上述分析可以得出:由于改进的时间指针方法能够在整个时间轴上使得任务的分配更加均衡,故与与传统时间指针方法相比,能够更加充分利用时间资源,减少空闲时间的浪费,同时提高任务成功调度的概率,增加有限时间内执行任务的数量。从而提高相控阵雷达的资源调度效率。
4 结束语
针对相控阵雷达的实时任务调度问题,提出了一种改进时间指针调度方法,给出了调度方法的详细流程,并对其进行了仿真。仿真结果表明:在执行任务负荷较大的情况下,方法在任务调度成功率和时间利用率上相比传统方法具有一定的优势,能够有效提升相控阵雷达的任务调度性能。方法未引入对能量资源和雷达信息处理资源的约束条件,研究多种约束条件下的任务调度方法,为下一步的研究重点。
[1] 严军超,胡明全.相控阵天气雷达气象雷达方程修正研究[J].现代雷达,2015,36(5):1-5.
[2] 邵正途,朱和平.空地联合反导预警技术探讨[J].传感器与微系统,2008,27(4):59-62.
[3] Gopalakrishnan S,Caccamo M,Shih C S.Finite-horizon scheduling of radar dwells with online template construction[C]∥Proc of 25th IEEE International Real-Time Systems Symposium,Lisbon,Portugal:IEEE,2004:23-33.
[4] 周 颖,王雪松,汪连栋,等.基于遗传算法的相控阵雷达最优化调度研究[J].系统工程与电子技术,2005,27(12):1977-1980.
[5] 周 颖,王国玉,王雪松,等.基于启发式混合遗传算法的相控阵雷达最优化调度[J].系统工程与电子技术,2006,28(7):992-1005.
[6] 卢建斌,胡卫东,郁文贤.多功能相控阵雷达实时驻留的自适应调度算法[J].系统工程与电子技术,2005,27(12):1981-1984.
[7] 赵 宇,李建勋,曹兰英,等.基于二次规划的相控阵雷达任务自适应调度算法[J].系统工程与电子技术,2012,34(4):698-703.
[8] 卢建斌,胡卫东,郁文贤.多功能相控阵雷达实时任务调度研究[J].电子学报,2006,34(4):732-736.
[9] 陈大伟.相控阵雷达自适应调度算法研究[D].成都:电子科技大学,2011.
[10] Cheng T,He Z S,Tang T.Dwell scheduling algorithm for multifunction phased array radars based on the scheduling gain[J].Journal of Systems Engineering,2008,19(3):479-485.
[11] Lu J B,Xiao H,Xi Z M,et al.Multifunction phased array resource management:Real-time scheduling algorithm[J].Journal of Computational Information Systems,2011,7(2):385-393.
[12] Lu J B,Xiao H,Xi Z M,et al.Phased array radar resource management:Task scheduling and performance evaluation[J].Journal of Computational Information Systems,2013,9(3):1131-1138.
[13] 张浩为,谢军伟,盛 川.综合优先级规划下的相控阵雷达自适应调度方法[J].兵工学报,2016,37(11):2163-2169.
[14] 郭坤鹏.相控阵雷达自适应调度算法研究[D].杭州:杭州电子科技大学,2015.
Task scheduling algorithm for phased array radar based on modified time pointer*
SUN Ming-cai, ZHANG Qin, YUAN Jun-chao
(Air and Missile Defense College,Air Force Engineering University,Xi’an 710051,China)
Aiming at the insufficient utilization of time resources of the phased array radar real-time task scheduling,a method based on modified time pointer is given to achieve task adaptive scheduling.Method takes the time pointer as object,selects the highest priority task to be current one from all tasks on the timeline that need to be scheduled and meet the execution conditions of the time pointer.The method reduces the waste of idle time effectively,and makes the radar to execute more tasks in limited time resources.Compared with the methods based on conventional time pointer by simulation,the result shows that the method increases task scheduling ratio and time utilization,improves the overall scheduling performance of the phased array radar,and has certain advantages.
phased array radars; time pointer; time resource; task scheduling
10.13873/J.1000—9787(2017)07—0023—03
2017—06—10
国家自然科学基金资助项目(61601499)
TN 958
A
1000—9787(2017)07—0023—03
孙铭才(1993-),男,硕士研究生,主要研究方向为相控阵雷达资源管理,E—mail:398327155@qq.com。
猜你喜欢
煤气与热力(2021年3期)2021-06-09
化工管理(2021年7期)2021-05-13
软件学报(2020年6期)2020-09-23
制造技术与机床(2019年4期)2019-04-04
电子制作(2019年24期)2019-02-23
测控技术(2018年7期)2018-12-09
广东第二课堂·小学(2017年9期)2017-09-28
现代防御技术(2016年1期)2016-06-01
信息通信技术(2015年6期)2015-12-26
华东理工大学学报(自然科学版)(2015年4期)2015-12-01
