
便携式快速GC程序升温中智能PID算法研究*
2017-08-09 01:34俞建成高文清
传感器与微系统 2017年7期
张 荣, 俞建成, 高文清
(宁波大学 高等技术研究院,浙江 宁波 315211)
便携式快速GC程序升温中智能PID算法研究*
张 荣, 俞建成, 高文清
(宁波大学 高等技术研究院,浙江 宁波 315211)
针对快速气相色谱仪(GC)在程序升温时,由于色谱柱低热容,导致升温的线性度和超调难以控制,影响仪器的可重复性,产生峰重叠的问题,开发了一种基于智能比例—积分—微分(PID)算法的色谱柱温控系统。系统选用LTM柱,以该柱自带的铂测温丝作为温度传感器元件,设计了温度采集和控制电路。算法上,在增量式PID的基础上,将目标温度段划分为多个子区间段,引入温度补偿控制,补偿值的大小与升温速率呈线性关系。实验结果表明:补偿后,算法升温速率误差为2.58 %,线性度达到99.92 %,超调在3 ℃以内,满足系统需求。
快速气相色谱仪; 程序升温; 温度补偿; 比例—积分—微分; 线性度
0 引 言
目前,国产气相色谱仪(gas chromatography,GC)在国内市场的占有率不到5 %,其各方面的性能指标如检出限,基线漂移及部分响应值等方面与国外产品尚有一定差距[1]。为满足对现场快速分析检测需求,该仪器正朝着小型化,智能化,快速化方向发展,而实现快速化的一个重要手段则是提高色谱柱的程序升温速率[2],但当升温速率提高后,相应的升温线性度会变差,各阶段的温度超调增加,降低仪器的可重复性,出现峰重叠的现象。因此,如何在快速程序升温的基础上提高升温线性度和降低超调显得尤为重要,而相对于恒温控制来说,匀速升温的控制则较为复杂[3]。
传统的温度控制技术是采用比例—积分—微分(PID)控制器来实现的[4,5]。戴辰铖[6]采用PID与BangBang混合算法控制程序升温,在恒温控制时能有效减少温度的超调,缩短调节时间,但是对线性升温则略显不足。周黎英等人[7]采用Fuzzy-PID算法对匀速升温进行控制,具有稳定性好,控温精度高等优点[8],但模糊控制规则的建立复杂,需要有丰富的控制经验,且无法克服温度测量滞后所带来的超调问题,尤其是升温速率较高时,这种超调更加明显。
针对上述不足,本文开发了以F28335为核心色谱柱温控系统,设计了温度采集电路。在增量式PID算法基础上,引入温度补偿控制,根据实时升温速率确定补偿大小。
1 硬件设计
如图1所示,系统采用分布式控制,温度的采集,算法的运算和I/O控制等交由下位机处理,上位机发送相关的命令控制下位机并实时显示上传的温度数据,二者通过以太网进行通信。下位机采用F28335处理器,该处理器主频达到150 MHz。选用以太网芯片W500与MCU进行高速数据交换。选用16位高精度的A/D转换芯片进行温度采集,采样率达200 kHz。系统主要由电源模块,温度采集模块,温度控制模块,通信模块和一些I/O控制模块组成。
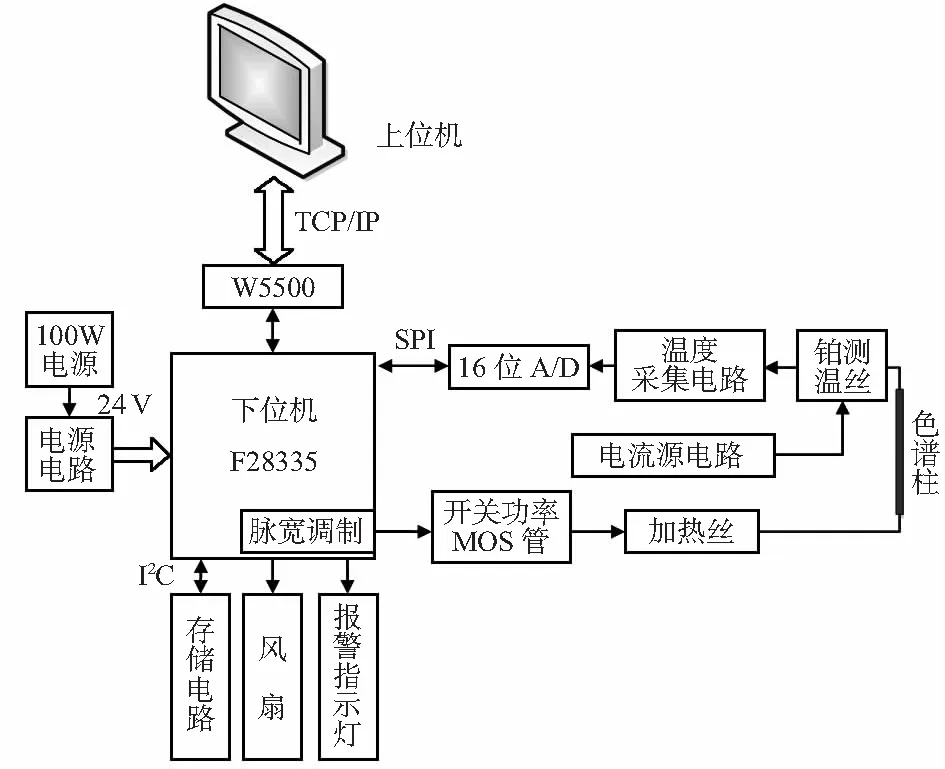
图1 系统总体框图
2 算法设计
传统的数字式PID算法表达式为[5]
(1)
式中 k为采样次数;e(k)为第k次采样值与设定值偏差;e(k-1)为第k-1次采样值与设定值偏差;Kp为比例系数;u(k)为第k次采样后的计算机输出值。为消除积分饱和带来的影响,采用增量式PID进行计算,表达式如下
Δu(k)=u(k)-u(k-1)

=Ae(k)+Be(k-1)+Ce(k-2)
(2)

如图2所示,设初始温度为T0,阶段目标温度为T,设定的升温速率为v,实时测量温度为Tk,补偿后的温度为Tcomp,有如下表达式
(3)
式中 T′为每个区间段的温度间隔;N为该阶段内的区间段数,向下取整;t′为每个区间段的时间间隔;ting为该阶段内当前控制总时间;n为当前区间段数;m为进入第n区间段后PID控制器的控制次数,当一个区间段控制完成置0;TPID为PID的控制周期,与设定的中断周期相同;TSetting为按照设定升温速率v在ting时刻应该达到的温度值;TPID≪t′;TnSet为第n个区间段内的目标温度。
由于热的传导需要一定时间,被测物体的温度不能及时传至温度传感器,导致当前的采样温度滞后于实际温度。当升温速率较低时,这种滞后带来的影响并不明显,而当升温速率提高后,在滞后时间内产生的滞后值增大,导致温度控制不稳定,线性度降低,超调量σ较大。

图2 区间段划分
图2中a,c,e三点为上升速率与设定升温速率相同的点,b点升温速率最大,d点升温速率最小。图3为图2单个子区间的放大图,设c点,e点与理想升温速率的直线距离为L1,L2,提高线性度的关键是使L1→0,L2→0。由于传感器的测量滞后,L1,L2增大。假设t1时刻测量的温度值为靠近a点的h点,当升温速率较低时,h点的测量值与实际值基本相等,L1,L2接近于0;当升温速率增大时,由于滞后值增大,使得其实际温度值可能已经是t2时刻对应的h′,若升温速率再快一些,实际温度为h″,该点温度已经超过了两线的交点A的温度值,而PID运算时仍然按照h点的测量值来计算,认为此时需继续加热,导致L1的值增大。同理,L2也会因测量滞后而增大。

图3 单个子区间放大图
为解决上述问题,引入了温度补偿控制,将升温速率的影响归纳其中,补偿方法如下:
1)当测量点为k时,补偿后的温度为
Tcomp=k′×ving+Tk
(4)
式中 k′为补偿系数,该值过小使补偿效果不明显,过大则产生补偿过度,出现控制不稳的现象;ving为h点瞬时升温速率,其表达式为
ving=(Tk-Tk-s)/(s×TPID)
(5)
式中 Tk- s为前s次温度测量值。
2)控制时,随着温度上升,e(k)=TnSet-Tcomp逐渐减小,加热功率也随之减小,出现在对应区间段的时间点到达时Tcomp与TnSet仍有较大差距的情况,为避免该情况出现,当TSetting-Tcomp<ε时(ε为设定的允许误差),进行全功率加热。
3 实验与讨论
实验中,选用型号为安捷伦DB—5MS,长20m、内径0.18mm、膜厚0.18μm的LTM色谱柱,具有体积小,升温迅速,功耗低等特点,特别适用于便携式快速气相色谱仪的使用,选用He气作为载气,加热时通入色谱柱内。
为证明温度滞后值随升温速率增加而增大,以80 ℃为起始温度,150 ℃作为目标温度,在不同的电源输出功率下进行加热,当达到目标温度时立即停止加热,自然冷却。测试其超调量和测量值达到150 ℃的瞬时升温速率,实验结果如图4,表1所示。

图4 不同瞬时升温速率对应的超调量

瞬时升温速率/(℃/s)1.292.033.294.395.195.69超调量/℃2.827.1412.5317.8420.2623.45
从图4中的曲线和表1中的数据可看出,LTM柱低热容的特点和传感器的测量滞后使得快速升温时温度会产生严重的滞后。在相同目标温度下,随着升温速率的不断上升,超调量呈明显增加的趋势,且基本呈线性关系,PID算法中的微分项虽有根据上升趋势来控制超调的作用,但是实际中设定的升温速率是变化的,通过微分项调节无法满足所有情况。该超调值对恒温控制和线性升温均有较大影响,所以必须进行温度补偿。
实验时,温度间隔T′取值为5,区间段的间隔t′设为5,s设为10,PID控制周期设为20 ms,设定初温为50 ℃,保持20 s后以4.5 ℃/s的速率上升,达到目标温度为150 ℃后保持3 min,将未作补偿和补偿后的实验进行对比,测得的结果如图5所示。可看出:在50 ℃和150 ℃ 2个恒温控制段中,补偿后的超调量在3 ℃以内,比未作补偿的超调量7 ℃小,且由于超调量小,使得调节时间变短,温度迅速进入平稳状态。

图5 补偿前后的一阶程序升温对比
将补偿后的线性升温数据利用最小二乘法进行线性拟合,如图6所示,得到的函数关系式为
T=4.384t-103.580
(6)
可知,实际升温速率为4.384 ℃/s,与设定的4.5 ℃/s之间的误差为2.58 %,然后将实际数据与拟合曲线进行线性度计算,得到的线性度为99.92 %。
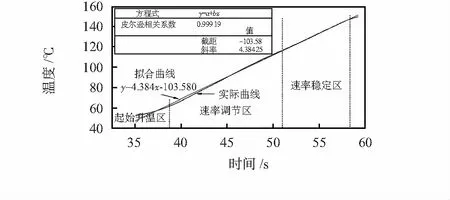
图6 线性升温曲线
4 结 论
开发了一种基于智能PID算法的色谱柱温控系统,设计了硬件和软件部分,算法上,将目标温度划分为多个子区间段,并引入温度补偿控制,补偿的力度随升温速率的增加而加大,将补偿后的温度值作为PID算法的输入量,提高了升温的线性度,降低了超调量,缩短了调节时间,满足了系统的需求。
[1] 赵 健,王志嘉,车 东,等.几种国产气相色谱仪与进口气相色谱仪的比较[J].分析仪器,2016(1):66-70.
[2] 杨 柳,潘 勇,曹树亚,等.高速气相色谱柱上快速升温技术研究进展[J].现代科学仪器,2012(3):135-138.
[3] Lei J J,Zhu H.Tempemmre control system of resistance furnace based on fuzzy PID[J].Chinese Journal of Control & Automation,2003,5(9):11-12.
[4] 谢永超.高精密恒温系统在NDIR气体分析仪中的应用[J].传感器与微系统,2014,33(11):156-158.
[5] 贾诚安,叶 林,葛俊锋,等.一种基于STM32和ADS1248的数字PID温度控制系统[J].传感器与微系统,2015,34(11):103-105.
[6] 戴辰铖.便携式气相色谱仪控制系统的研究[D].哈尔滨:哈尔滨工业大学,2013.
[7] 周黎英,赵国树.模糊PID控制算法在恒速升温系统中的应用[J].仪器仪表学报,2008,29(2):405-409.
[8] 刘喜峰,许春香,徐晋科,等.基于模糊PID烟叶烤香温湿度控制系统设计[J].传感器与微系统,2009,28(6):83-85.
俞建成,通讯作者,E—mail:yujiancheng@nbu.edu.cn。
Research of intelligent PID algorithm in fast portable GC temperature programming*
ZHANG Rong, YU Jian-cheng, GAO Wen-qing
(Research Institute of Advanced Technology,Ningbo University,Ningbo 315211,China)
When fast gas chromatography(GC) in temperature programming,due to the characteristics of chromatographic columns with low heat capacity,linearity and overshoot of warming up are difficult to control,affect repeat ability of instrument,resulting in overlapping peaks.In order to solve this problem,a kind of temperature control system based on intelligent PID algorithm is developed.The system selects LTM column,with the platinum temperature measuring wire as temperature sensor component,the temperature acquisition and control circuit is designed.On the basis of incremental PID,target temperature segment is divided into several sub regions,and the temperature compensation is introduced.The compensation value is linear with the heating rate.The experimental results show that the error of the temperature rising rate after compensation is 2.58 %,the linearity is 99.92 %,and the overshoot is less than 3 ℃,which meets the requirement of the system.
fast gas chromatography(GC); programmed temperature; temperature compensation; PID; linearity
10.13873/J.1000—9787(2017)07—0065—03
2016—09—21
国家自然科学基金资助项目(61501273); 浙江省自然科学基金资助项目 (LY16B050002)
TH 833
A
1000—9787(2017)07—0065—03
张 荣(1991-),男,硕士研究生,研究方向为精密仪器。
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
数学物理学报(2022年4期)2022-08-22
中学生数理化·高一版(2021年2期)2021-03-19
中国外汇(2019年13期)2019-10-10
石油化工自动化(2018年5期)2018-11-14
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
现代工业经济和信息化(2016年4期)2016-05-17
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
遥测遥控(2015年2期)2015-04-23
