AQWA和HARP在TLP整体性能分析中的应用对比
2017-08-09 03:21:29高静坤梁园华刘浩韦斯俊杨清峡
船海工程 2017年4期
高静坤,梁园华,刘浩,韦斯俊,杨清峡
(1.中海石油(中国)有限公司深圳分公司,广东 深圳 518000;2.中国船级社海工技术中心,北京 100007)
AQWA和HARP在TLP整体性能分析中的应用对比
高静坤1,梁园华2,刘浩1,韦斯俊2,杨清峡2
(1.中海石油(中国)有限公司深圳分公司,广东 深圳 518000;2.中国船级社海工技术中心,北京 100007)
利用水动力分析软件AQWA和HARP分别对中国南海水深400 m左右的某潜在开发油田拟采用的张力腿平台进行波浪绕射/辐射、静态偏移和自由衰减分析,与模型试验结果进行对比结果表明,AQWA和HARP都能用于张力腿平台的波浪绕射/辐射分析、静态偏移和自由衰减分析,但是在进行时域动态耦合分析时,HARP软件对于二阶波浪载荷的预报比AQWA软件更为准确。
张力腿平台;整体性能分析;AQWA;HARP
随着海洋油气开发不断向深水挺进,适用于深海的新型浮式平台逐渐成为深海油气开发的首选。其中张力腿平台(tension leg platform,TLP)作为一种典型的浮式平台,具有半刚性半顺应的特点。TLP垂向升沉、转动运动小,具有良好的运动性能,成为目前深水油气开发中最常用的平台形式之一[1]。TLP包括4大部分:①平台主体(Hull),提供浮力和结构预张力并支撑上部甲板和设备载荷;②系泊系统(Tendon),称为张力腿筋腱,将平台主体与海底地基连接起来;③基础(Foundation),提供张力腿筋腱强大的抗拔力并为整体结构提供良好稳定性、安全性;④立管系统[2]。
目前,工业界采用时域动态耦合分析方法对TLP整体性能进行分析,考虑整个系统的几何、载荷等非线性。
AQWA软件是通用有限元软件ANSYS中的一套集成模块,主要用于满足各种结构水动力学特性的评估及相关分析需求,包括小型舰艇、大型船舶、FPSO、TLP和半潜平台等。
以我国南海水深400 m左右的某潜在开发油田为例,利用AQWA和HARP对拟采用的TLP进行整体性能分析,对该TLP进行频域绕射/辐射分析、静态偏移分析、自由衰减分析和时域动态耦合分析,对该TLP整体性能进行全面的评估。对比两个软件计算得到的该TLP整体性能结果,结合模型试验数据,分析AQWA和HARP在TLP整体性能分析的应用。
1 计算原理
1.1 基本原理
TLP整体性能分析采用时域的方法进行模拟,首先使用频域方法计算TLP水动力系数和波浪激励力,然后与张力腿筋腱和立管系统耦合进行时域动态求解,步骤如下。
1)频域水动力计算。根据三维频域势流理论计算得到浮体的水动力参数。
2)水动力参数转换。将计算得到的频域水动力参数和波浪激励力通过傅里叶变换,转换为时域中的无穷频率附加质量、延迟函数和波激力脉冲函数。
3)静平衡计算。考虑定常环境载荷,计算浮体的初始平衡位置,作为时域动态耦合分析的初始条件。
4)动态耦合计算。考虑变化的环境载荷以及筋腱、立管系统的动态影响,求解平台运动和筋腱张力。
1.2 平台运动控制方程
平台的一、二阶波浪激励力、附加质量系数和附加阻尼系数都可以在频域内求解,整个TLP系统的耦合动力计算在时域内进行。TLP系统的时域运动方程为
(1)
式中:M为广义质量矩阵;A∞为无穷频率附加质量矩阵;X为平台位移矢量;K(t)为延迟函数矩阵;D为线性阻尼系数矩阵;C为平台回复力系数矩阵。方程右边的外力Fexternel(t)可以写为
(2)
式中:F1st(t)和F2nd(t)分别为一、二阶波激力;Fwind(t)为风力;Fcurrent(t)为流力;Fmoor(t)为筋腱、立管系统的回复力。
方程(1)中的附加质量系数、阻尼系数,以及波浪激励力、漂移力等可以根据三维势流理论求得,再通过傅里叶逆变换得到时域的结果,求解时域耦合运动方程即可得到TLP系统的整体性能。
AQWA和HARP的波浪绕射/辐射分析都是基于三维势流理论的面元法。但是,2个软件求解二阶波浪载荷的方法不一样。AQWA通过Newman近似理论计算波浪二阶载荷,HARP通过对自由液面网格进行积分来计算二阶波浪载荷。Newman近似方法可以大幅减少计算时间。Newman近似方法在解决水平慢漂运动时能够得到令人满意的结果,但是对于TLP非常重要的垂向高频运动的求解则不太准确,所以需要通过计算完整二阶波浪载荷传递函数(Full QTFs)得到更为精确的结果。
2 数值计算模型
利用AQWA和HARP对该TLP进行波浪绕射/辐射分析,图1和图2分别为AQWA和HARP软件中TLP的湿表面网格模型,AQWA中平台湿表面网格数是4 012;HARP中平台湿表面网格数是10 624,HARP在计算二阶波浪载荷时需要在自由液面进行积分,所以还需划分自由液面网格。

图1 AQWA中湿表面网格
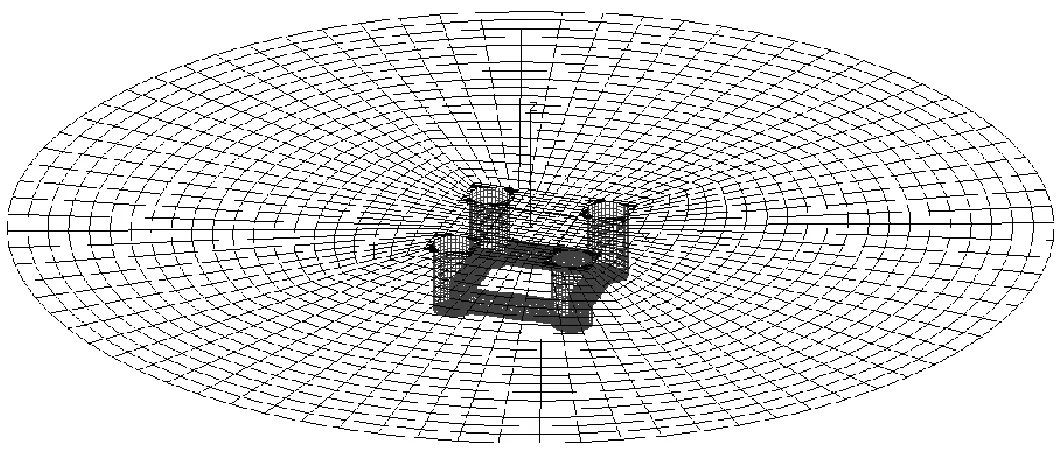
图2 HARP中湿表面网格
完成TLP频域水动力计算后,需要建立平台与张力腿筋腱、立管系统的耦合模型。在AQWA软件中,需要通过TETHER模块建立筋腱、立管系统。在DECK14中通过引用TETHER模块中的TELM、TSPA、TSPV和TETH命令,设定筋腱和立管的连接坐标、连接刚度等参数,即可完成筋腱和立管模型的建立,见图3。
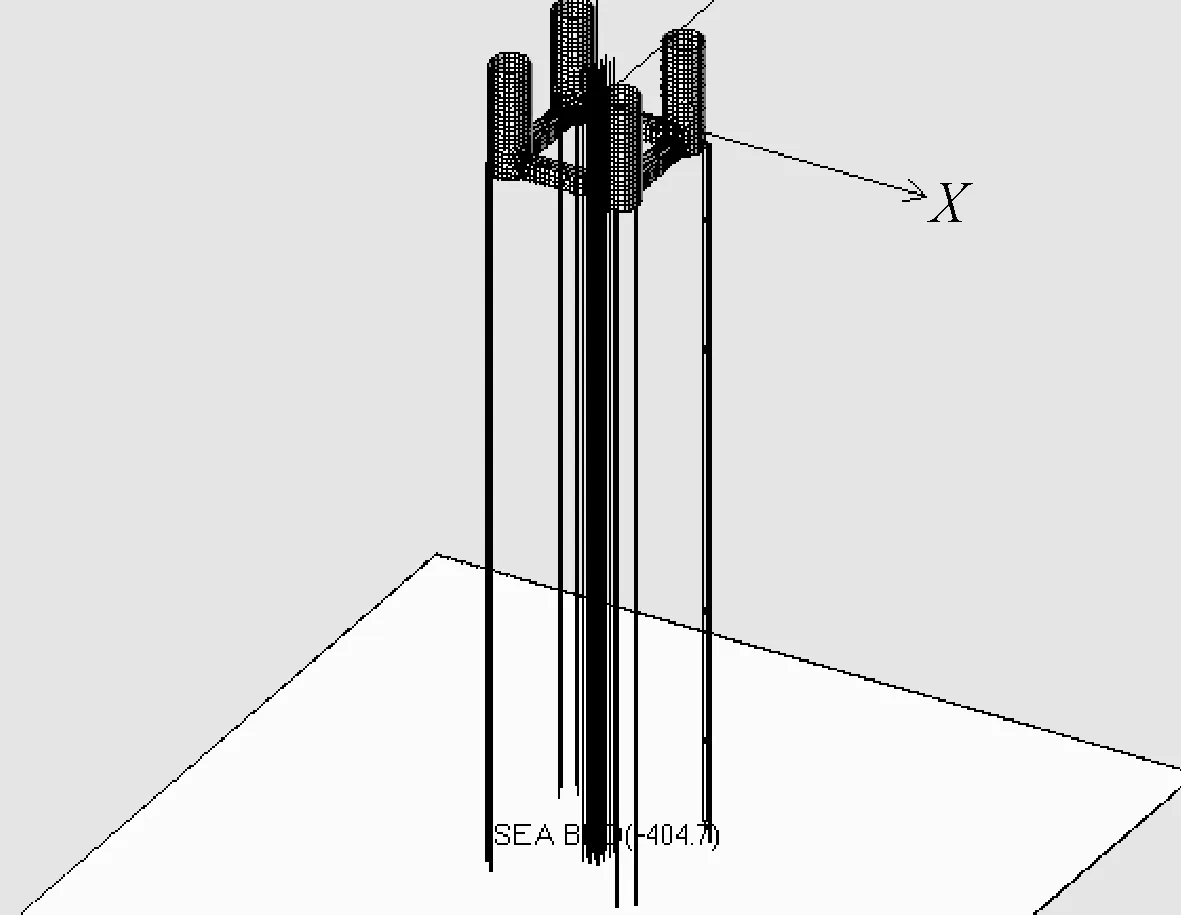
图3 AQWA耦合模型
在HARP软件的Flex Module模块里建立筋腱和立管模型,通过设定筋腱和立管各分段的参数和坐标,完成耦合模型建立,见图4。
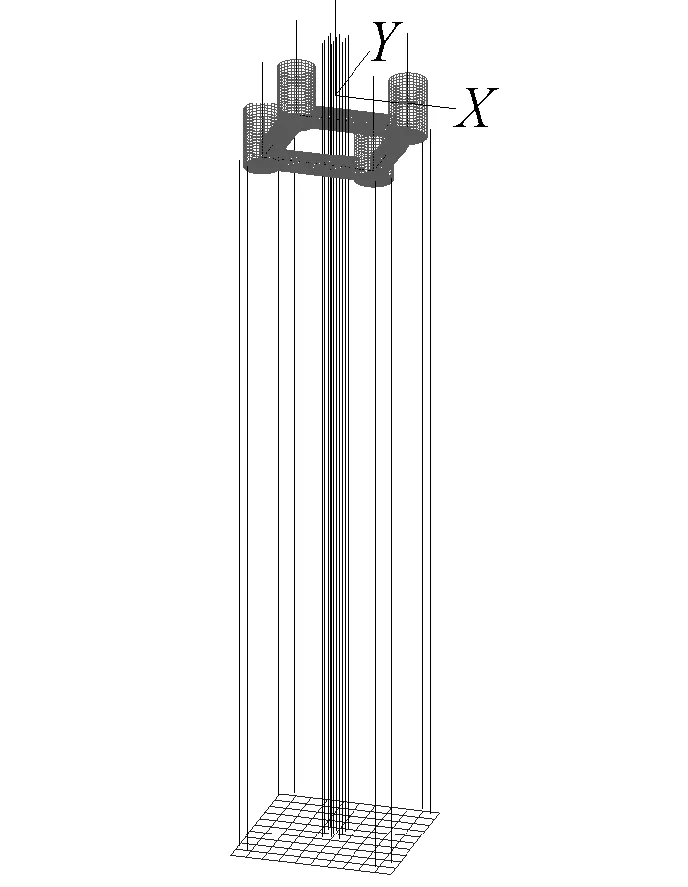
图4 HARP耦合模型
AQWA和HARP软件在计算流力和风力时采用的方法不一样。在AQWA中通过流力系数和风力系数来计算作用在平台上的流力和风力。在HARP中,通过风力作用面积和风压中心坐标计算风力;流力通过莫里森方程计算。
3 计算结果
3.1 平台运动响应传递函数
在进行TLP动态耦合分析前,需要进行波浪绕射/辐射分析。波浪绕射/辐射分析分别在AQWA-LINE模块和HARP-Hydrodynamic Module模块中进行。因为TLP关于X轴和Y轴对称,所以计算时只考虑0°~90°浪向,计算周期由2~40 s。考虑到平台对称性,选取具有代表性的自由度(纵荡、垂荡、横摇)运动RAO对比,见图5。可以看到,2个软件计算得到的平台运动RAO结果是一致的。
3.2 静态偏移分析
在进行动态耦合分析前,利用AQWA和HARP软件对整个系统进行静态偏移分析,得到筋腱系统的回复刚度。静态偏移分析计算得到TLP“水平偏移vs筋腱水平回复力”、“水平偏移vs平台下沉距离”,与模型试验结果对比见表1。
由表1可见,AQWA和HARP软件静态偏移分析结果基本是一样的,与模型试验结果也一致,说明2款软件计算TLP耦合模型的回复刚度结果都是合理的[3-4]。
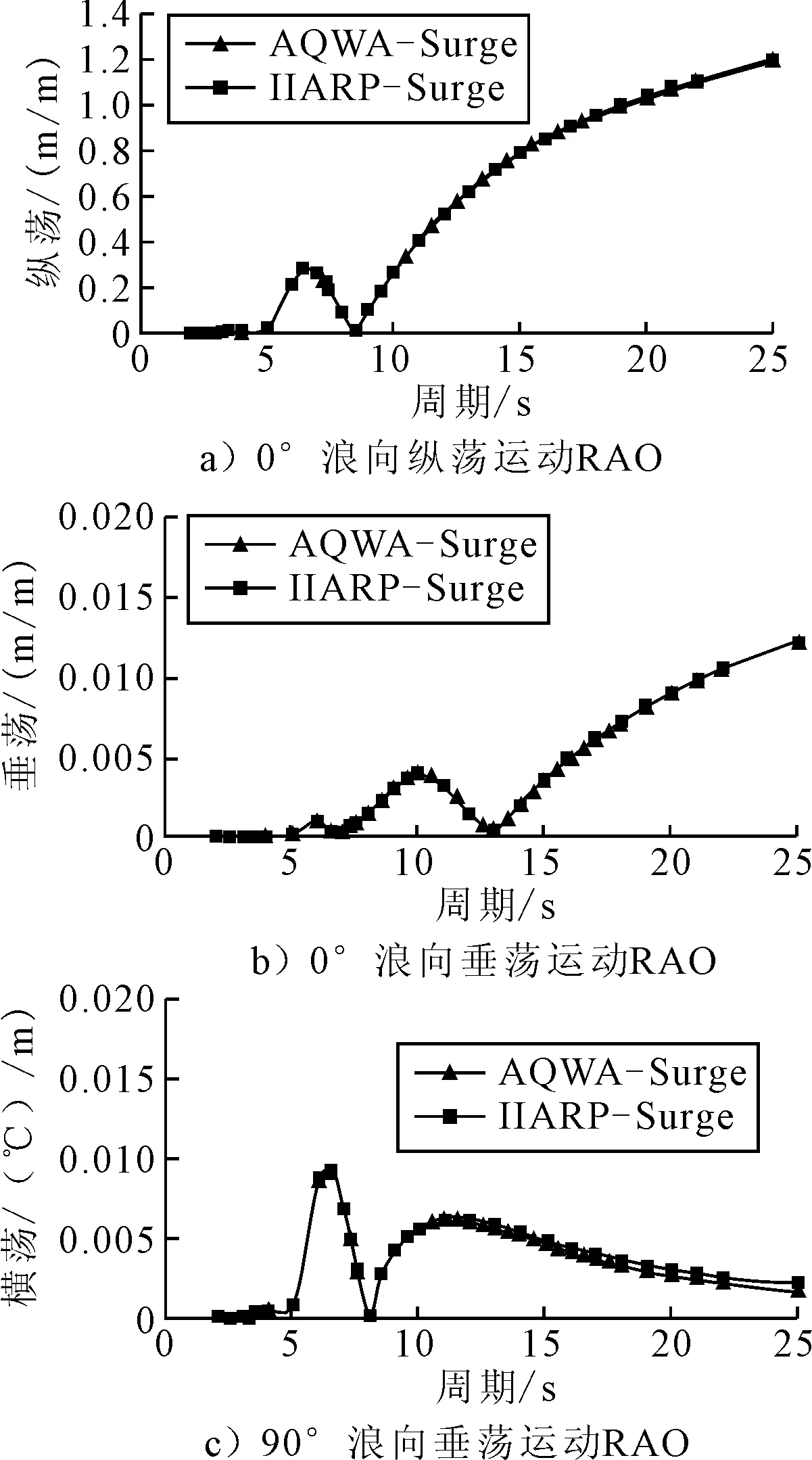
图5 TLP运动RAO对比

表1 TLP回复刚度结果
3.3 自由衰减分析
在AQWA和HARP中,对耦合模型进行自由衰减分析,得到平台临界阻尼比和各自由度运动固有周期,见表2。
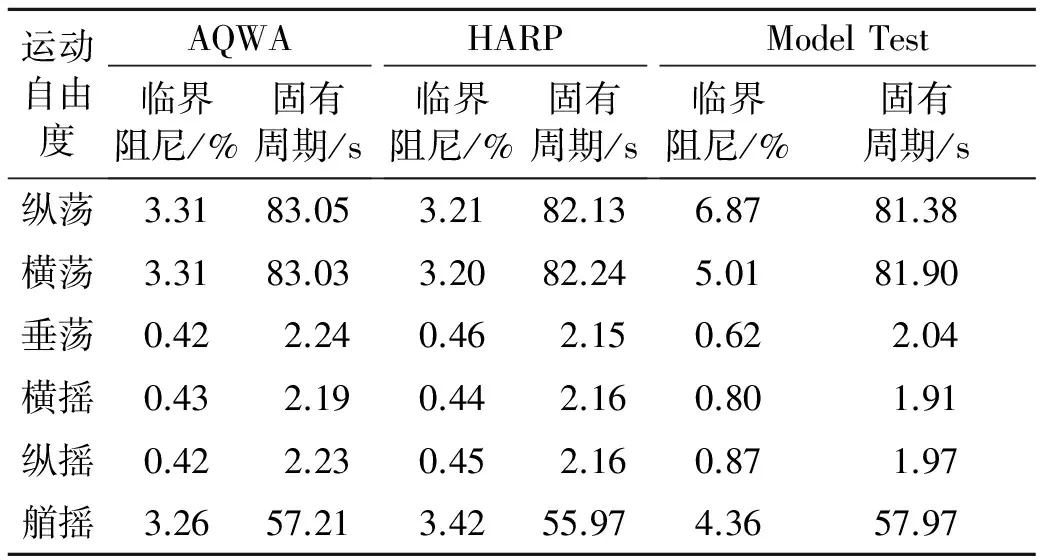
表2 TLP自由衰减分析结果

图6 TLP自由衰减曲线
选取平台纵荡和横摇分别代表水平面内和垂直面内的运动,AQWA和HARP自由衰减曲线对比见图6,2个软件的自由衰减曲线基本重合。表2中2个软件自由衰减分析得到平台临界阻尼比和固有周期与模型试验结果一致。水平面内的运动固有周期较大,纵荡和横荡固有周期约为81~83 s,艏摇约为56~57 s;垂直面内的垂荡、横摇和纵摇运动的固有周期约为2 s[5-6]。
3.4 时域动态耦合分析
在对千年一遇海况中TLP进行模拟时,忽略风和流载荷,只考虑波浪载荷对平台的作用。千年一遇海况的有义波高为16.5 m,谱峰周期为17.2 s。采用JONSWAP谱描述不规则海况,谱峰升高因子α为2.4。模拟时长为3 h。本次整体性能分析中4~40 s属于波频范围,大于40 s属于高频,小于4 s属于低频。
3.5 平台运动结果
TLP纵荡和垂荡运动时历结果对比见图7和图8。水平面内的纵荡、横荡和艏摇属于低频响应,受二阶低频波浪载荷影响较大;垂直面内的垂荡、横摇和纵摇属于高频响应,受高频波浪载荷的影响较大。由图7可以看到,纵荡的时历曲线在峰值和谷值处不会出现“锯齿”,即不存在高频的纵荡运动。由图8可以看到HARP的垂荡运动时历曲线峰值和谷值处会出现“锯齿”——高频垂荡运动响应(springing,弹振),而AQWA的垂荡时历曲线没有出现“弹振”响应现象。

图7 TLP重心纵荡时历结果对比
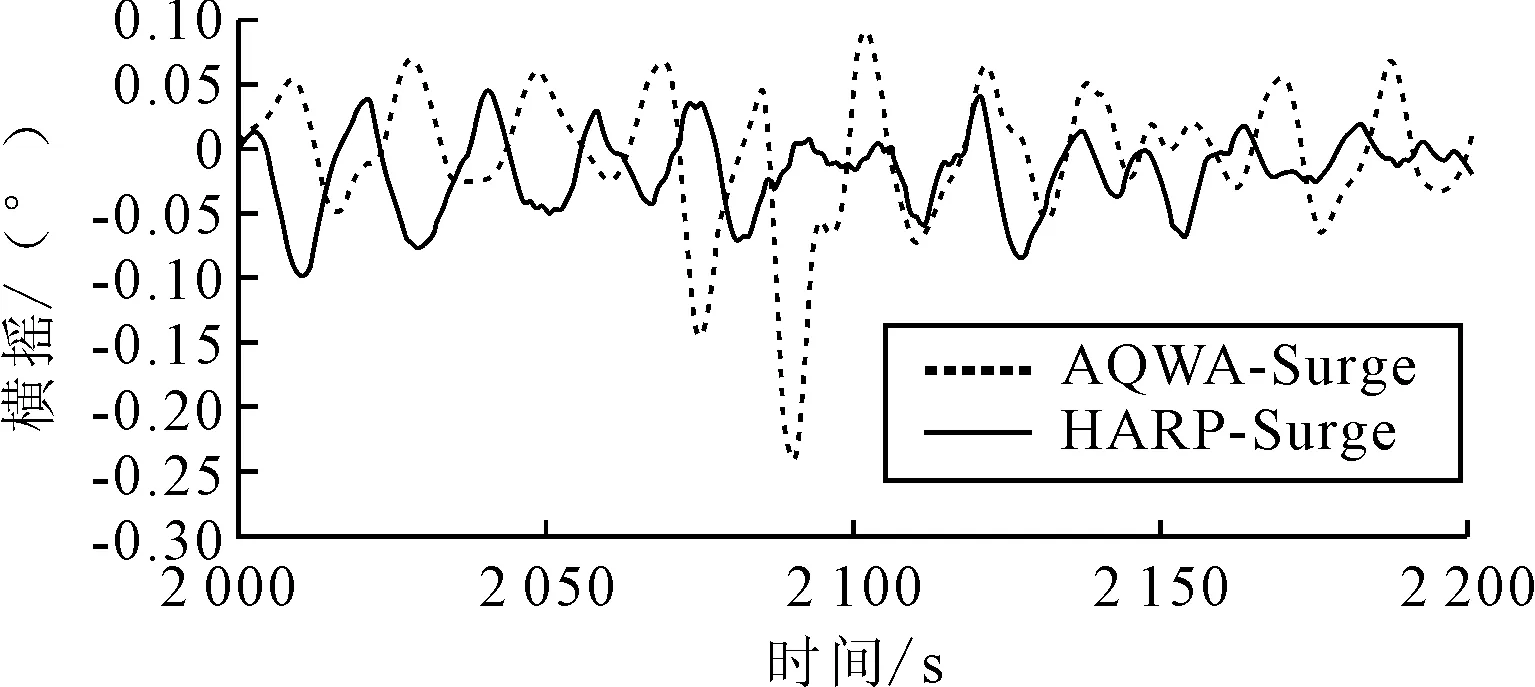
图8 TLP重心垂荡时历结果对比
纵荡和垂荡运动的响应谱见图9和图10。对响应谱进行积分,可以得到各频段运动响应标准差,见表3。对于纵荡运动响应,HARP低频和波频段的要远大于高频段,AQWA的波频段要大于低频和高频段;响应谱低频峰值对应频率是0.011 Hz(89.5 s),接近于纵荡固有周期82 s;波频峰值对于的频率0.045 Hz(22.4 s),接近于常见波浪周期15~25 s,由此可知波频载荷也是纵荡响应的重要激励。对于垂荡运动响应,AQWA和HARP响应谱在低频和波频段都很大,HARP响应谱高频段在0.45 Hz时出现一个明显峰值,而AQWA则没有。HARP高频段峰值出现频率0.45 Hz(2.22 s),与平台垂荡固有周期2.2 s一致。在波浪频率范围内,TLP不会出现垂荡高频共振,但在实际海况中,存在二阶波浪载荷,TLP会出现垂荡高频共振。AQWA的计算结果没捕捉到TLP高频响应,HARP的时历和频谱结果捕捉到了高频振荡现象。
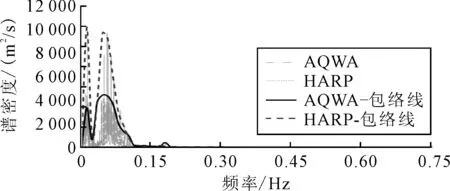
图9 TLP纵荡运动响应谱
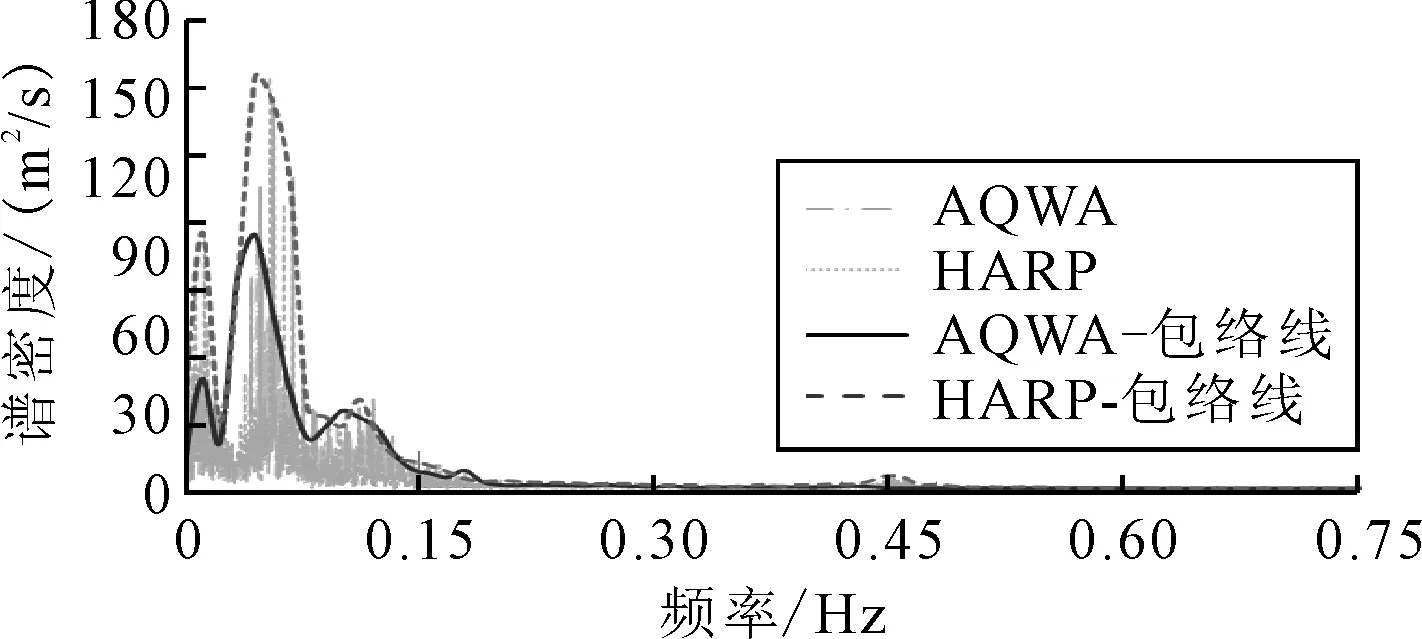
图10 TLP垂荡运动响应谱
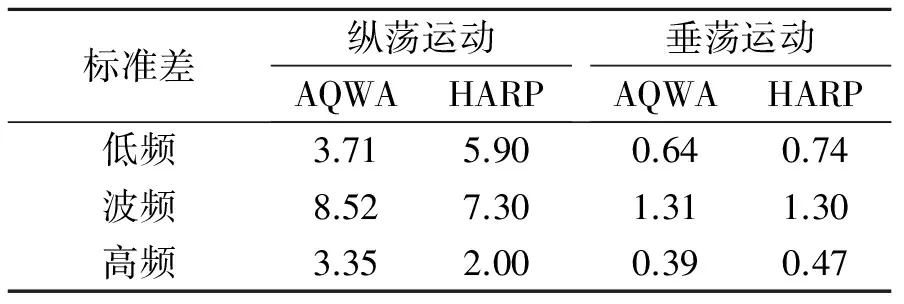
表3 纵荡运动响应谱标准差对比 m
3.6 筋腱张力结果
整体性能分析得到张力时历结果,#5号筋腱的张力时历结果见图11。可以看到HARP的时历曲线峰值和谷值处会出现很多“锯齿”——张力高频的振荡响应,而AQWA的时历曲线没有这一现象。
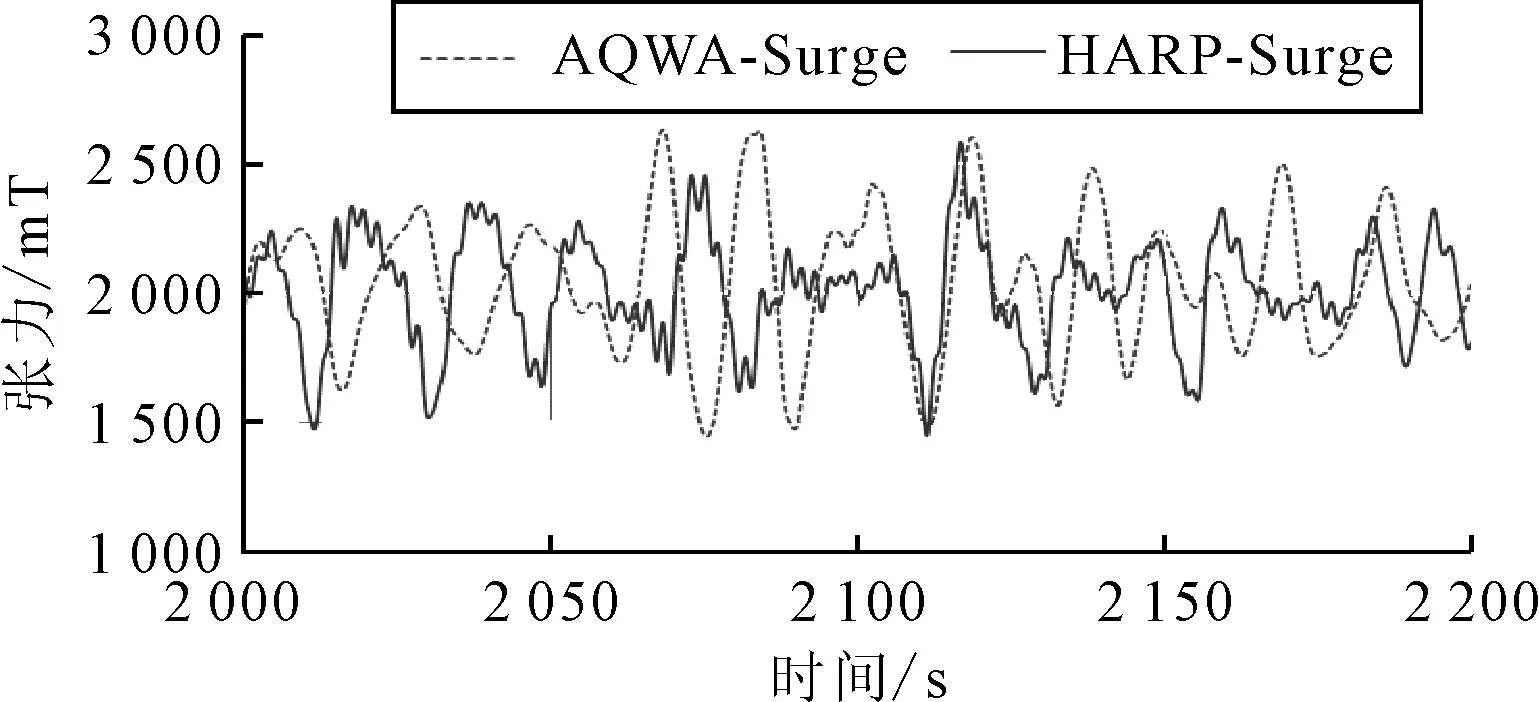
图11 Tendon#5顶部张力时历结果对比
张力响应谱见图12。各频段张力的标准差见表4。由图12可见,AQWA和HARP的波频段筋腱张力响应是主要的,HARP的张力响应谱在高频段0.45 Hz时会出现一个峰值,而AQWA则没有。峰值出现的0.45 Hz(2.22 s)与自由衰减分析时垂荡、横摇、纵摇固有周期(2 s)一致。由表4可见,低频和波频段标准差基本一致,高频段差别稍大,HARP的高频标准差约为AQWA的2倍。
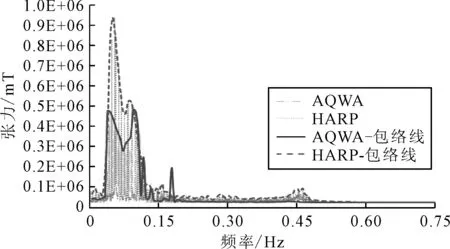
图12 Tendon#5顶部张力响应谱
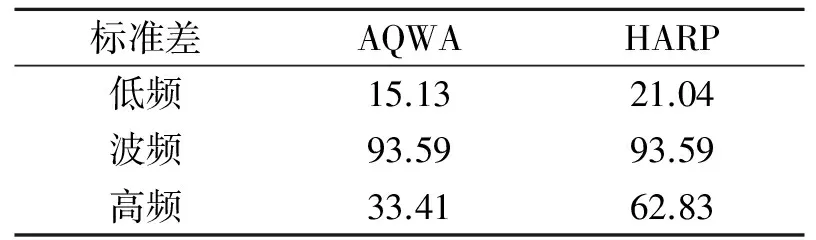
表4 Tendon #5张力响应谱标准差对比 mT
4 结论
1)2款软件都适用于TLP的绕射/辐射、静态偏移和自由衰减分析,都能与模型试验结果较为吻合;
2)HARP软件比AQWA软件更为适合于该TLP时域动态耦合分析。因为HARP软件通过划分自由液面网格来求解二阶波浪载荷,其结果相较于AQWA更为准确。在时域动态耦合分析中,HARP软件结果能够很好地模拟垂荡响应中的高频现象(弹振)和筋腱张力响应中的高频现象。而在只考虑波浪载荷情况下,AQWA的耦合分析无法模拟TLP的高频响应现象。
[1] “典型深水平台概念设计研究”课题组.张力腿平台水动力响应分析[J].中国造船,2005,46(增刊1):477-489.
[2] 余建星,张中华,于皓.张力腿平台总体响应分析方法研究[J].海洋通报,2008,27(2):97-102.
[3] 宋林峰,孙丽萍,赵君龙,等.张力腿平台系泊系统敏感性分析[J].中国造船,2012,54(4):109-117.
[4] 于皓,周延东,李欣.张力腿平台的环境载荷及响应[J].中国造船,2007,48(增刊1):336-342.
[5] 肖宇维,孙树民.基于AQWA的轻型张力腿平台型式研究[J].科学技术与工程,2012,12(33):8987-8989.
[6] 闫功伟,欧进萍.基于AQWA的张力腿平台动力响应分析[J].东南大学学报(自然科学版),2009(增刊2):304-310.
On Application of AQWA and HARP in Global Performance Analysis of TLP
GAO Jing-kun1, LIANG Yuan-hua2, LIU Hao1, WEI Sijun2, YANG Qing-xia2
(1.Shenzhen Branch of CNOOC, Shenzhen Guangdong 518000, China;2.CCS Ocean Engineering Technology Research and Development Center, Beijing 100007, China)
A global performance of tension leg platform (TLP), which is potentially applied in China South sea, was analyzed by using hydrodynamic analysis software AQWA and HARP. The analysis on wave diffraction and radiation, static offset and free decay was performed by using these two software and the results were compared to the model test results. Coupled dynamic analysis in time domain was performed to predict the TLP motion in 1000-years sea state. The results showed that AQWA and HARP can both be used in analysis on wave diffraction and radiation, static offset and free decay of TLP, while HARP is more suitable in coupled dynamic analysis for TLP in time domain than AQWA.
tension leg platform; global performance; AQWA; HARP; application
10.3963/j.issn.1671-7953.2017.04.036
2016-10-20
工信部科研(工信部联装[2014]503号);工信部“500 m水深油田生产装备TLP自主研发”专项经费资助
高静坤(1975—),男,硕士,高级工程师
研究方向:海洋结构物设计及工程管理
U674.38
A
1671-7953(2017)04-0156-05
修回日期:2016-11-10
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18 11:22:44
中国海上油气(2021年2期)2021-06-09 08:13:48
海洋工程装备与技术(2020年2期)2020-07-13 07:08:18
当代陕西(2020年24期)2020-02-01 07:06:46
天津大学学报(自然科学与工程技术版)(2019年1期)2019-12-21 09:03:36
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58
测控技术(2018年11期)2018-12-07 05:49:02
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
西北工业大学学报(2015年4期)2016-01-19 03:31:55
电测与仪表(2015年2期)2015-04-09 11:28:50