
基于Cruise的增程式客车能量管理策略仿真研究
2017-08-08 03:01杨森仇斌塔拉李理光
汽车技术 2017年7期
杨森仇斌塔拉李理光
(1.同济大学,上海 201804;2.清华大学汽车安全与节能国家重点实验室,北京 100084)
基于Cruise的增程式客车能量管理策略仿真研究
杨森1仇斌2塔拉2李理光1
(1.同济大学,上海 201804;2.清华大学汽车安全与节能国家重点实验室,北京 100084)
以某增程式天然气混合动力公交车为研究对象,在全电力集中控制策略基础上,开发了基于电池SOC的预设转速控制策略和基于电池SOC和车速的预设转速控制策略,并在AVL Cruise中建立了整车模型及相应控制算法模块,在中国典型城市公交循环工况下进行了仿真分析。仿真结果表明,所开发的控制策略能够有效改善公交车在电荷保持阶段的气耗和电量消耗及电量保持阶段下的综合能耗。
1 前言
由于纯电动汽车存在电池成本高、充电时间长、纯电续驶里程不足等问题[1],因而加装了辅助动力单元(Auxiliary Power Unit,APU)的增程式电动汽车(Extend⁃ed-Range Electric Vehicle,E-REV)成为一种重要的过渡技术。目前此类车型所采用的控制策略主要包括模糊控制策略、全局最优控制策略和基于规则的控制策略[2~7],其中模糊控制策略鲁棒性较好,在并联式混合动力汽车上应用较多,全局最优控制策略需要预知循环工况,而基于规则的控制策略由于规则简单、可靠性高,被广泛应用于各类混合动力汽车。如,文献[8]基于ADVISOR建立了燃料电池增程式汽车模型,利用遗传算法对模糊规则进行了优化,提高了燃料经济性;文献[9]利用离散动态规划算法,针对某并联混合动力汽车开发了以循环油耗最低为目标的全局最优控制策略;文献[10]针对一款增程式电动赛车,开发了以行驶所需功率等为参数进行模式切换的规则控制策略,在降低燃料消耗的同时减少了30%的CO2排放。
在使用性能上,尽管模糊控制与全局最优控制使用了较为先进的数学工具,但前者控制规律固定,动态性能较差,而后者不能够在线应用[11],因此基于规则的控制策略仍有较大的工程意义。为此,本文以某天然气混合动力公交车为对象,在全电力集中控制策略(All Electric Range-Focused Strategy)基础上,提出只基于电池SOC和基于SOC及车速的两种控制策略,通过在AVL Cruise平台中建立整车模型,对整车等效百公里天然气消耗量(下称气耗量)和全工况综合能耗进行了仿真研究。
2 车辆参数与模型建立
2.1 车辆基本参数与动力匹配
某天然气混合动力公交车的基本参数如表1所列,动力性和经济性设计要求如表2所列。
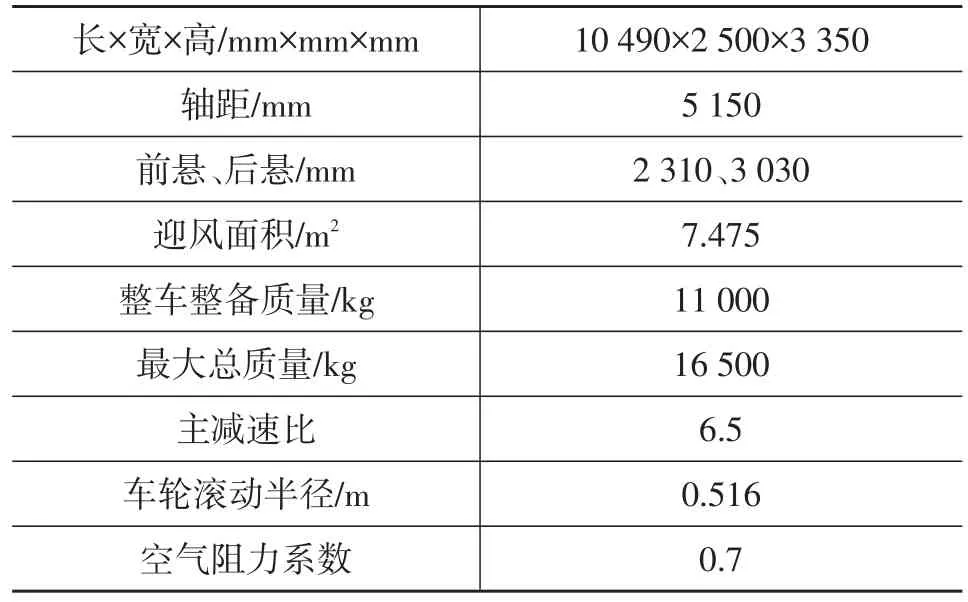
表1 某天然气混合动力公交车基本参数
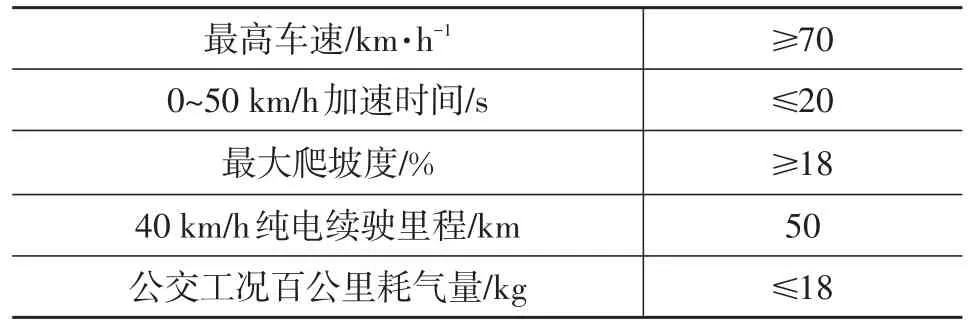
表2 动力性及经济性要求
为满足公交车的动力经济性要求,首先需要进行动力部件的参数匹配及选型,最终的匹配结果如表3所列。需要说明的是,与传统混合动力系统中电池只起辅助作用不同,增程式电动车一般有一定的纯电续驶里程要求[12],因此匹配的动力电池组的总储存能量较大。
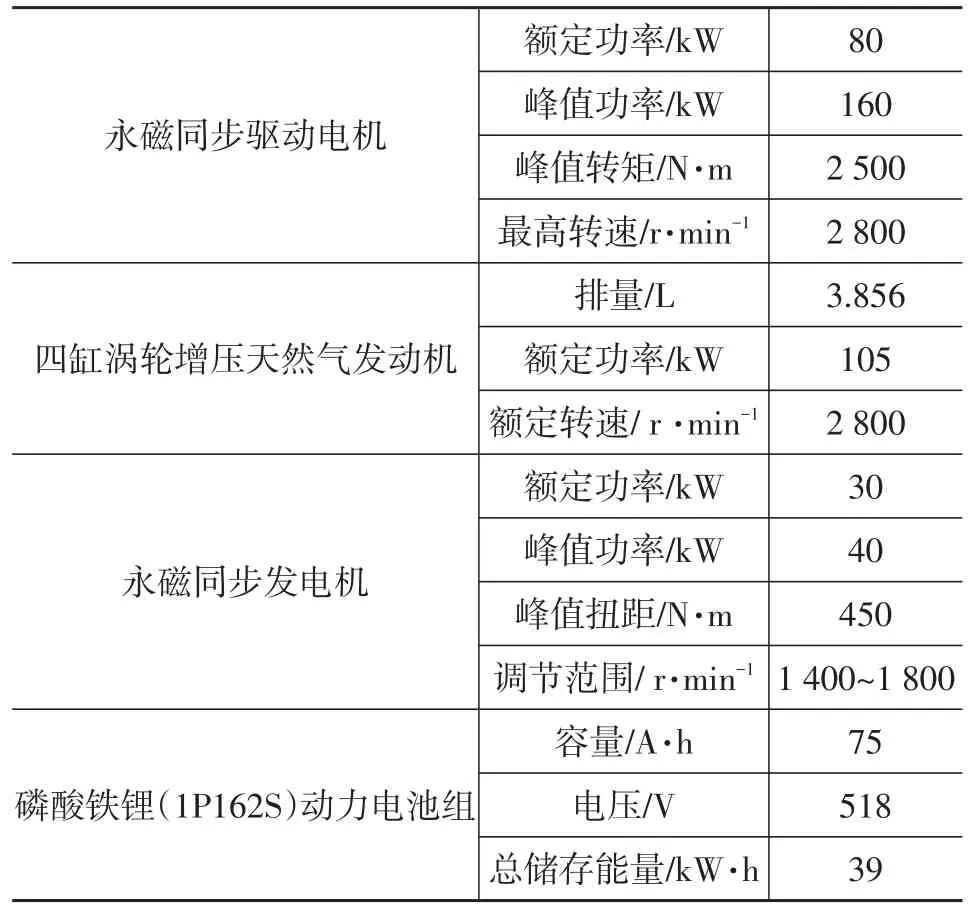
表3 主要动力部件及参数
2.2 建立车辆仿真模型
在确定车辆参数和动力系统主要部件后,基于AVL Cruise平台建立天然气混合动力公交车仿真模型。Cruise是奥地利AVL公司研发的一款正向仿真软件,主要用于开发阶段对车辆的动力经济性、排放性能和制动性能进行仿真分析。利用已有的模块箱进行车辆建模,并建立模块之间的信号连接、机械连接、电子连接和排放连接,最终建立整车仿真模型如图1所示。模型包括轮胎、制动器、电气系统、电动机、发电机、动力电池组、发动机、传动系、差速器及其电气系统共17个机械模块,防滑控制、制动控制、电动机控制、增程器控制、PID控制共5个控制模块,另外还有驾驶舱、监视器及一个常量存储模块。其中电气系统模块用于模拟公交车行驶时空调、风扇等附件消耗功率,电动机控制及增程器控制为主要的能量分配控制模块。
3 能量管理策略
3.1 全电力集中控制
全电力集中控制策略是插电式混合动力汽车(Plug-in Hybrid Electric Vehicle,PHEV)上常见的能量管理策略,本文以此策略作为后续仿真过程所采用策略的比较基准,其控制策略如图2所示[13]。由图2可看出,在车辆行驶的初始阶段,电池电量充足,采用纯电驱动,当电池SOC下降到预设的下限阈值时,APU起动提供车辆行驶所需的平均驱动功率,并保持电池电量在一定范围内。
在图1仿真模型中,车辆的APU由“增程器控制”模块控制,APU基本控制流程如图3所示。
图3中,Operating Mode为增程器起动信号,1代表起动,0代表关闭;Start Switch为发电机起动开关,1代表起动,0代表关闭;Start Switch为驾驶者输入的油门踏板信号,1代表踩下踏板,0代表踏板回位;Load Signal为发动机负荷信号,0代表不起动,0.5代表半负荷状态;PID Load Signal来自“PID控制”模块的中间控制变量,该模块对当前发动机实际转速与预设转速做比较,并通过PID算法输出PID Load Signal信号给车辆的APU控制模块。本次仿真中,暂将预定转速值设为1 600 r/min,将全电力集中策略中的SOC下限阈值设为30%,为满足车辆在电荷维持模式下行驶时SOC维持在30%附近,将APU流程中的上限阈值(即SOCmax)设为30.5%,下限阈值(即SOCmin)设为29.5%。
3.2 基于SOC的发动机预设转速控制
在全电力集中策略中,综合考虑发动机的效率、NVH和常用转速等因素,将发动机的预设转速定为1 600 r/min。但发动机预设转速固定会使动力系统跟随工况变化的能力下降,导致气耗量上升等情况,因此在全电力集中控制策略基础上,将发动机预设转速与车载电池的SOC关联起来,如表4所列,即当SOC值低于下限阈值而又相对较高时降低发动机转速;当SOC值很低时提高发动机转速。为实现该控制策略,在整车仿真模型中增加“SOC-转速”控制模块,向PID控制模块输入实时预设转速。
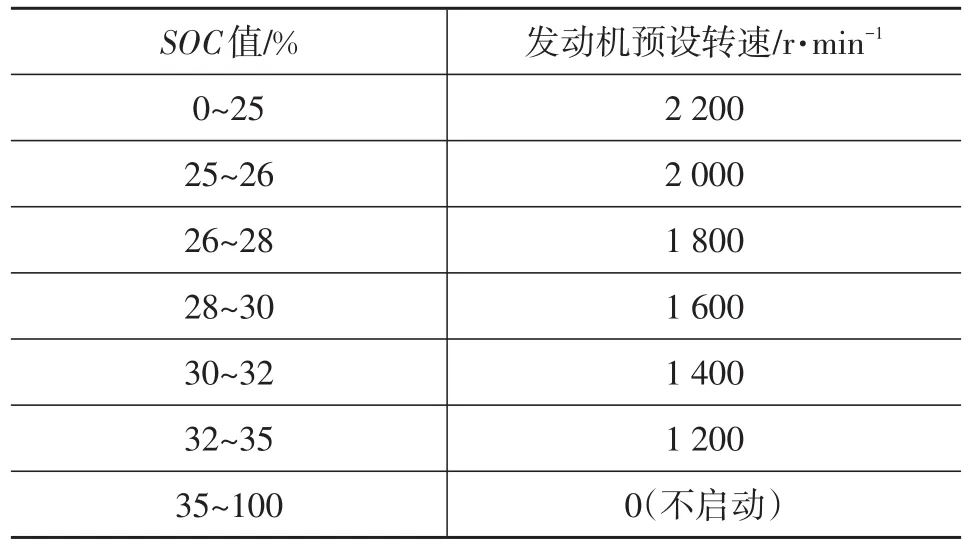
表4SOC值与发动机预设转速对应关系
3.3 基于SOC和车速的发动机预设转速控制
由于以电池SOC单变量控制发动机预设转速时,没有考虑车辆加速过程中的瞬时功率需求,因此将预设转速与电池SOC和车速同时关联起来,如图4所示。当电池SOC较高(高于35%)时,APU不起动;当SOC达到下限阈值后,APU起动,且发动机预设转速随车速改变。当车速较低时,对应发动机转速也较低,随着车速的提高,预设转速线性提高到某一固定值不变,直至SOC值高于起动APU时的下限阈值,増程器关闭。发动机预设转速固定值由车载电池SOC决定,SOC值越低,发动机预设转速越高。为实现该控制策略,在整车模型基础上增加“SOC-车速-转速”控制模块,以向PID模块输入发动机预设转速。
需要说明的是,由于该混合动力公交车的动力电池容量较大,根据仿真和实际样车在公交线路的路试经验,其SOC的波动非常缓慢,因此在短时间内发动机的预设目标转速主要与车速有关。由于公交车行驶时速度变化平缓且均匀,因此发动机预设转速只会在车辆起动阶段随车速增加而缓慢增大,而当公交车车速达到20~30 km/h以上时,发动机转速基本稳定在设定的平台上平稳运转。通常公交车车速一般都是平缓加减速,发动机的目标转速也会随之平缓增加或降低,因此在基于SOC和车速控制策略下,预设转速不会出现频繁波动,这一方面会提高整车的经济性,同时也使得车辆的NVH特性得到改善。
4 仿真结果及分析
在仿真平台上分别运行全电力集中控制策略车辆模型、基于SOC的控制策略车辆模型和基于SOC及车速的控制策略车辆模型,结果显示,3种模型均能满足车辆的动力性及经济性要求。由于能量管理策略优化主要针对APU起动之后的混合动力驱动阶段,因此主要分析该阶段的循环百公里气消耗量及全工况能耗,工况选择具有代表性的中国典型城市公交循环工况(下称典型工况)。
4.1 百公里气耗量
设置车载电池SOC初值为30.0%。考虑到按照单循环工况折算可能产生较大的随机误差,所以使车辆连续运行10个典型工况并按里程折算后,得到采用3种策略的车辆在不同载荷下混合动力驱动阶段的百公里气耗量,结果如表5所列。与全电力集中策略相比,在基于SOC的发动机预设转速控制策略下,车辆在空载、半载、满载下的百公里气耗量分别下降了2.1%、7.4%和6.5%,燃料经济性得到一定改善。

表5 百公里气耗量仿真结果 kg/100 km
气耗量下降的原因是,基于SOC的转速调整使得车辆在电池SOC较高时发动机工作在较低转速点,对应发动机外特性曲线上的最大功率较小,由于车辆行驶所需的驱动功率不变,根据负荷率的定义(发动机在某一转速下发出的有效功率与相同转速下所能发出的最大有效功率的比值)可知,发动机的负荷率提高,发动机的燃料经济性更好(高负荷率下泵气损失少,且传热损失小)。另外,当电池SOC低于35%,但仍处于较高范围内(如高于28%)时,发动机在预设的较低转速点工作,机械效率提高,在相同功率需求下燃料经济性提高。
在将发动机预设转速与SOC和车速同时关联后,与只关联电池SOC相比,车辆在3种负荷下的循环百公里气耗量又分别下降了11.8%、10.5%和7.6%。可见,相比于发动机预设转速只关联SOC,同时关联车速和SOC的控制策略能够明显改善燃料经济性,这是因为,在只关联SOC的控制策略下,当APU的转速只设置在很小的范围内时,为了满足发电机能够发出最大功率的需求,需要将发动机设定在较高转速,这样当公交车低速运行而动力电池SOC又偏高时,发电机的发电功率会很小,导致发动机在该转速下的负荷率太低,整车燃料经济性变差;另一方面,当公交车低速运行时,偏高的发动机转速又会产生过大的噪声和振动,也不利于舒适性改善。而在基于SOC和车速的控制策略下,不仅考虑了电池SOC值较高时需要的APU功率较小,同时考虑了循环工况内车速较低时APU需求功率较小,故在低速阶段发动机预设转速随车速线性增加,一方面保证了小功率需求时发动机有较高的负荷率;另一方面又降低了小功率需求阶段的发动机转速,从而进一步提高了发动机的工作效率。预设转速随电池SOC变化范围不同阶梯设置,即SOC值越低,对应的APU起动车速越低,保证了低SOC下APU的充电功率。
4.2 全工况综合能耗
增程式公交车在实际运行时,一般是从动力电池满电状态以纯电驱动状态过渡到混合动力驱动状态,也就是先进入CD运行模式,然后进入CS运行模式(下称全工况模式)。以车辆半载为例,全工况仿真时,使车辆连续运行20个典型循环工况,累计行驶里程为118.2 km,在全电力集中控制策略下电池参数变化如图5所示,另外两种控制策略下的变化曲线与此类似。
仿真时电池SOC初始值设为100.0%,在得到20个典型循环工况内的电池电量消耗和天然气消耗量后,将电耗折算为等效气耗量[14,15],从而得到20个典型循环工况下的折算百公里总气耗量,结果如表6所列。
图6~图8分别为全电力集中控制策略、基于SOC控制策略、基于SOC和车速控制策略下,发动机功率随时间的变化曲线。从图中可看出,3种控制策略下发动机的输出功率大部分时间在10~30 kW范围内波动。对比图6、图7和图8可看出,在全电力集中控制策略下,发动机的输出功率不稳定,这是由于发动机预设转速较高,其预设转速下的峰值功率也较高,实际输出功率波动较大,这种发动机工作的不稳定使得其燃料经济性变差。相比之下,在基于SOC和车速的控制策略下,发动机的工作状态最稳定,波动幅度最小。负荷率与发动机的波动共同决定了在基于SOC和车速的控制策略下全工况折算总气耗量最低。

表6 全工况电耗与气耗
图9为增程器模块中天然气发动机的万有特性曲线,由图9可看出,在功率为10~30 kW范围内,随发动机转速的降低,有效燃料消耗率向更经济区域移动,而图6~图8也表明在3种控制策略下,发动机输出功率的波动范围基本在该范围内。这也解释了采用基于SOC及基于SOC和车速的控制策略后,发动机平均转速降低,且折算百公里气耗量随之下降的原因。
5 结束语
基于AVL Cruise建立了某款天然气增程式混合动力公交车的动力性和经济性仿真模型,并在中国典型城市公交循环工况下进行了性能仿真。以全电力集中控制策略作为比较基准,设计了只基于电池SOC及基于电池SOC和车速的两种发动机预设转速控制策略,仿真结果表明,整车各项动力经济性指标均达到设计要求。此外,研究发现,综合考虑电池SOC和车速等因素来预设发动机转速的控制策略能够有效改善发动机在低功率需求下的负荷率,并减少发动机的功率波动,从而能够显著提高整车的燃料经济性。
1 Song B,Shin J,Lee S,et al.Design of a high power transfer pickup for on-line electric vehicle(OLEV)//Electric Vehicle Conference(IEVC),2012 IEEE International.IEEE,2012:1~4.
2 Wirasingha S G,Emadi A.Classification and review of control strategies for plug-in hybrid electric vehicles.vehicular Technology,IEEE Transactions on,2011,60(1):111~122.
3 Schacht E J,Bezaire B,Cooley B,et al.Addressing drivability in an extended range electric vehicle running an equivalent consumption minimization strategy(ECMS).SAE Technical Paper,2011.
4 朱武喜,孙立清.增程式电动公交客车控制策略研究.汽车技术,2013(4):1~5.
5 许世景.串联混合动力汽车能量管理策略优化研究:[学位论文].天津:天津大学,2013.
6 Skugor B,Deur J.Instantaneous optimization-based energy management control strategy for extended range electric vehicle.SAE Technical Paper,2013.
7 Tingting D,Fuquan Z,Jun L,et al.Design method and control optimization of an extended range electric vehicle// Vehicle Power and Propulsion Conference(VPPC),2011IEEE.IEEE,2011:1~6.
8 洪先建,宋珂,章桐.增程式电动汽车模糊控制能量管理策略研究.佳木斯大学学报:自然科学版,2013,31(2):174~178.
9 张炳力,张平平,赵韩,等.基于离散动态规划的PHEV燃油经济性全局最优控制.汽车工程,2010,32(11).
10 Walsh P M,King J,Gantt L R,et al.An extended-range electric vehicle control strategy for reducing petroleum energy use and well-to-wheel greenhouse gas emissions.SAE Technical Paper,2011.
11 申彩英.串联混合动力汽车能量优化管理策略研究:[学位论文].天津:天津大学,2010.
12 Miller M A,Holmes A G,Conlon B M,et al.The GM“Voltec”4ET50 multi-mode electric transaxle.SAE Technical Paper,2011.
13 Gonder J,Markel T.Energy Management Strategies for Plug-In Hybrid Electric Vehicles.National Renewable Energy Laboratory(NREL),Golden,CO.,2007.
14 GB/T 2589—2008综合能耗计算通则.
15 宁艳红,郭兴,刘云岗.基于运行工况的纯电动车与汽油车能耗排放比较分析.内燃机与动力装置,2012(3):5~7.
(责任编辑 文 楫)
修改稿收到日期为2017年3月9日。
A Study on Simulation of Energy Management Strategy of Extended Range Hybrid Bus Based on Cruise
Yang Sen1,Qiu Bin2,Ta La2,Li Liguang1
(1.Tongji University,Shanghai,201804;2.State Key Laboratory of Automotive Safety and Energy,Tsinghua University, Beijing 100084)
Based on all-electric-range-focused strategy,the default speed control strategy based on batterySOCand default speed control strategy based on combination of batterySOCand vehicle speed are developed,then the vehicle simulation model with corresponding control algorithm modules is built with AVL Cruise software.The above model is simulated under China typical city bus drive cycle.The simulation results show that the developed control strategies can effectively improve the CNG consumption rate during the Charge Sustaining(CS)phase and also the comprehensive energy consumption during both Charge Depleting(CD)and CS phase.
Extended range hybrid bus,Energy management strategy,Gas consumption, Simulation
增程式混合动力汽车 能量管理策略 气耗量 仿真
U462.1
A
1000-3703(2017)07-0037-06
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
能源工程(2022年2期)2022-05-23
房地产导刊(2022年4期)2022-04-19
汽车工程师(2021年12期)2022-01-17
汽车工程师(2021年11期)2021-12-21
建材发展导向(2021年15期)2021-11-05
建材发展导向(2021年11期)2021-07-28
汽车维修与保养(2019年1期)2019-05-05
汽车电器(2018年12期)2019-01-04
电机与控制学报(2018年9期)2018-05-14
