
光纤光栅钢筋腐蚀监测数据处理方法
2017-08-07 09:27张文锋唐聪杨太年
中国港湾建设 2017年7期
张文锋,唐聪,杨太年
(中交天津港湾工程研究院有限公司,天津港湾工程质量检测中心有限公司,天津300222)
光纤光栅钢筋腐蚀监测数据处理方法
张文锋,唐聪,杨太年
(中交天津港湾工程研究院有限公司,天津港湾工程质量检测中心有限公司,天津300222)
光纤光栅传感器具有抗干扰强、体积小、精度高、耐久性高等优点,现已成为钢筋腐蚀监测技术研究的热点。文章针对典型的光纤光栅钢筋腐蚀监测系统,提出了一种多传感器监测数据处理方法,具体包括波长数据预处理(补偿后波长、波长变化量、钢筋腐蚀率)、异常数据检验与剔除(t检验法)、一致性检验(分布图法)、基于Bayes估计的数据融合、腐蚀率融合值的模糊区间建立等过程,并通过算例验证了监测数据处理方法的有效性。
光纤光栅;钢筋腐蚀;监测;数据处理;传感器
0 引言
氯离子侵蚀引起的钢筋腐蚀是导致海洋环境钢筋混凝土结构耐久性不足的主要原因。钢筋腐蚀在海洋环境下普遍存在,后期有加速发展的趋势,若不及时处理,往往会造成后期维修难度和成本的增大。由此可见,尽早发现钢筋腐蚀,并及时采用处理措施,不仅有利于保障结构耐久性,而且有助于降低维护成本。钢筋腐蚀监测技术可在不破坏结构完整性的基础上,实时获取混凝土中钢筋的腐蚀信息,是尽早分析钢筋腐蚀原因的有效手段,并可为及时采取应对措施提供必要条件,对于保障结构耐久性和降低结构后期维护费用有着积极意义。
国内外开发了一系列钢筋腐蚀监测传感器,其中阳极梯、Corrowatch传感器、ECI腐蚀传感器等在国内外工程中已得到广泛应用[1]。与传统传感器相比,光纤传感器集传感与信息传输于一体,且具有抗干扰强、体积小、精度高、耐久性高等优点,现已成为国内外钢筋腐蚀监测技术研究的新热点。目前,用于钢筋腐蚀监测的光纤传感器主要有微弯型光纤传感器、光纤光栅传感器、长周期光纤光栅传感器,光波导型传感器等,其中以光纤光栅传感器研究最为广泛。
提出一种基于钢筋腐蚀膨胀及光纤光栅传感原理的钢筋腐蚀传感器组合[2],通过光纤并联器、光纤转接盒、光缆、光纤监测仪等部件可实现在线监测和远程数据传输[3],目前已在工程结构中得到应用。单个传感器组合仅从某一范围描述钢筋腐蚀状况,只提供局部信息,很难准确反映结构中钢筋的普遍腐蚀状况。因此,在实际工程中,通常会在结构的典型区域埋设一定数量的传感器组合形成多传感器系统。与单个传感器相比,多传感器不仅能增强传感器系统的存活能力和抗干扰能力,而且可提高数据的可信度和精度,并增加信息的利用率。以下针对典型的光纤光栅钢筋腐蚀监测系统提出一种监测数据处理方法。
1 光纤光栅钢筋腐蚀监测数据处理步骤
假设在某实体工程的典型区域埋设n组传感器,每组传感器由一个钢筋腐蚀传感器和一个补偿传感器构成,分别对每组传感器中的钢筋腐蚀传感器读数m次,对补偿传感器读数1次。某典型区域多传感器系统,h时间段监测数据的处理步骤包括波长数据预处理、异常数据的检验与剔除、一致性检验、Bayes数据融合、腐蚀率融合值的模糊区间建立等。图1为光纤光栅钢筋腐蚀监测数据处理的流程图。

图1 光纤光栅钢筋腐蚀监测数据处理的流程图Fig.1Flow diagram for the monitoring data processing of the fiber Bragg grating sensors for steel corrosion
1.1 数据预处理
在数据处理前,首先通过数据预处理将光纤监测仪采集的波长信号转换为钢筋腐蚀率数据。根据第j号补偿传感器h时间段的波长和初始时间段的波长计算补偿波长,接着对腐蚀传感器中心波长进行补偿计算,然后结合腐蚀传感器初始波长得到波长变化量,最后根据波长变化量与腐蚀率的定量关系计算h时间段的腐蚀率。波长变化量Δλi(h,j)及腐蚀率ρi(h,j)计算公式如下:
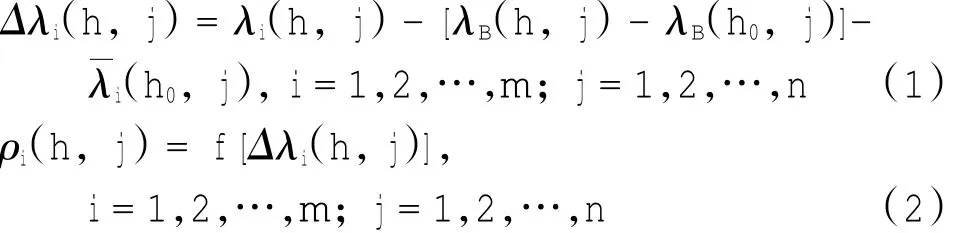
式中:λ(ih,j)为h时间段第j号钢筋腐蚀传感器的第i次中心波长的读数值;λ(Bh,j)为h时间段相应补偿传感器的读数;λ(Bh0,j)为初始时间段相应补偿传感器的波长;λ(ih0,j)为初始时间段第j号钢筋腐蚀传感器波长读数的平均值;ρ(ih,j)为第j号传感器h时间段的钢筋腐蚀率;Δλ(ih,j)为波长变化量;f[Δλ(ih,j)]为波长变化量与钢筋腐蚀率的定量关系。
1.2 异常数据的检验与剔除
一般认为监测数据符合正态分布,常用的异常数据检验准则有t检验(3S)准则、狄克松(Dixon)准则、布拉格斯(Grubbs)准则等,本文采用t检验准则[4]。对预处理得到的h时间段每个传感器组的m个腐蚀率值ρ(ih,j)进行t检验,并剔除异常数据。异常数据t检验的基本公式如下:

式中:ρ(kh,j)为可疑值;ρ(h,j)*和σ(h,j)*分别为不包括可疑值在内的m-1个采集值的平均值及标准差;K(m,α)为t检验系数,α为显著性水平,m为读数次数。当确定ρ(kh,j)为异常值,将其剔除,对剩余数据继续检验;当ρ(kh,j)为非异常值时,不能剔除,检验结束。
1.3 一致性检验
腐蚀率值ρ(ih,j)通过异常数据检验和剔除后,进行一致性检验,本文采用分布图法[5]。分位图法用中位数(M)、四分位数(F)、四分位数离散度(dF)、淘汰点(Θ)等统计量来反映数据的分布结构,以找出数据中较不可靠的离异值。将n个传感器组在h时间段剔除异常数据后所求得的平均值作为单个传感器的监测数据,那么一致性数据的区间边界可按式(4)计算:

式中:γ为一致性检验系数,其大小视系统的测量误差要求而定,一般取0.5、1.0、2.0等值[6]。当传感器数据处于区间[Θv,Θu]时,认为数据是有效一致的,检验结束;当数据不处于该区间时,将其淘汰,并对剩余数据继续检验。
1.4 基于Bayes估计的数据融合
多传感器数据融合方法有加权平均法、卡尔曼滤波法、Bayes估计法、D-S证据推理、产生式规则等,本文采用Bayes估计法[6-7]。假设h时间段n个传感器组的监测数据经一致性检验后得到一致数据集为H={ρ(h,1)**,ρ(h,2)**,…,ρ(h,r)**},r≤n。采用Bayes估计法对一致性数据进行融合,计算公式如下:

式中:μN为Bayes数据融合所得融合值;ρ(h,j)**为经过一致性检验后的数据;σ2j为ρ(h,j)**的方差;μ0和σ20分别为单个传感器多次有效读数的均值和方差。
1.5 腐蚀率融合值的模糊区间建立
腐蚀率融合值μN是点估计值,仅仅是腐蚀率数据的一个近似值。尽管这个近似值很接近真实值,但未反映出其误差范围。然而,钢筋腐蚀往往是不均匀的,且传感器数量有限,腐蚀率数据应当在某个区间内,因此仅用融合值μN来表示钢筋腐蚀程度显得不够科学。为此,采用腐蚀率模糊区间[8]来表示钢筋的腐蚀程度,模糊区间计算公式如下:

式中:ρˆ为腐蚀率数据;ω为阀值;μN为腐蚀率融合值;σ2j为ρ(h,j)**的方差。
2 算例
假设某钢筋混凝土构件布设了10个传感器组,每个腐蚀传感器读数6次,每个补偿传感器读数1次。腐蚀传感器的平均初始波长、补偿传感器的初始波长和某次采集的波长读数见表1。腐蚀传感器某次采集的波长读数见表2。传感器组腐蚀率公式为ρ=2.269 16(Δλ)2+0.643 02Δλ+ 0.232 29,其中Δλ为波长变化量。传感器组所得腐蚀率t检验的显著性水平为0.05,腐蚀率均值一致性检验的系数γ为1.0,腐蚀率模糊区间确定时采用的阀值为0.5。采用本文方法计算某次:1)传感器的有效腐蚀率数据;2)有效的腐蚀率均值;3)腐蚀率融合值;4)腐蚀率的模糊区间。
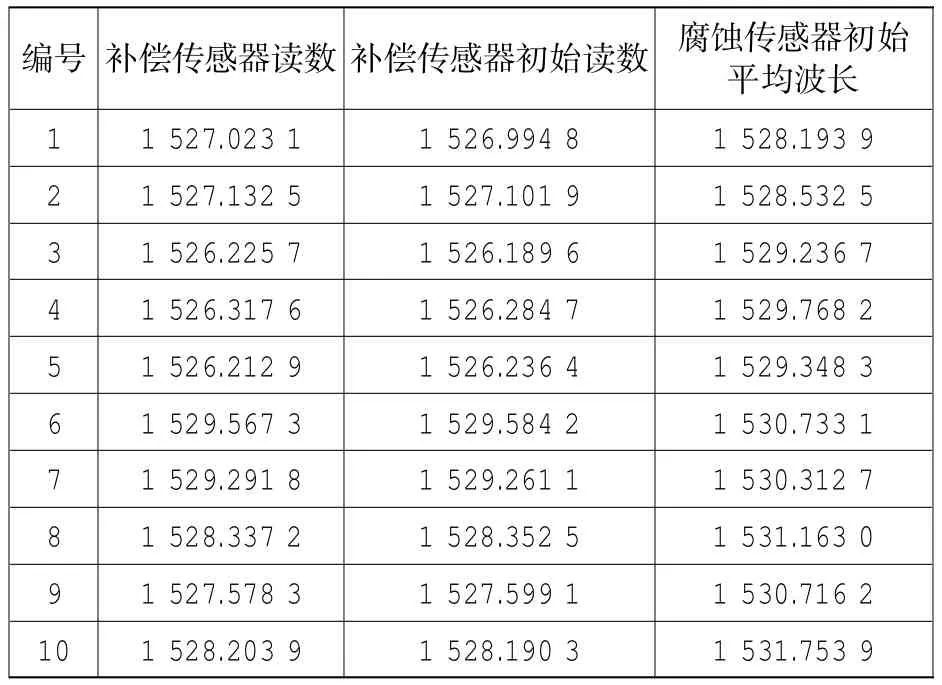
表1 腐蚀传感器及补偿传感器的波长读数Table 1Wavelength of the corrosion sensors and their compensation sensors nm
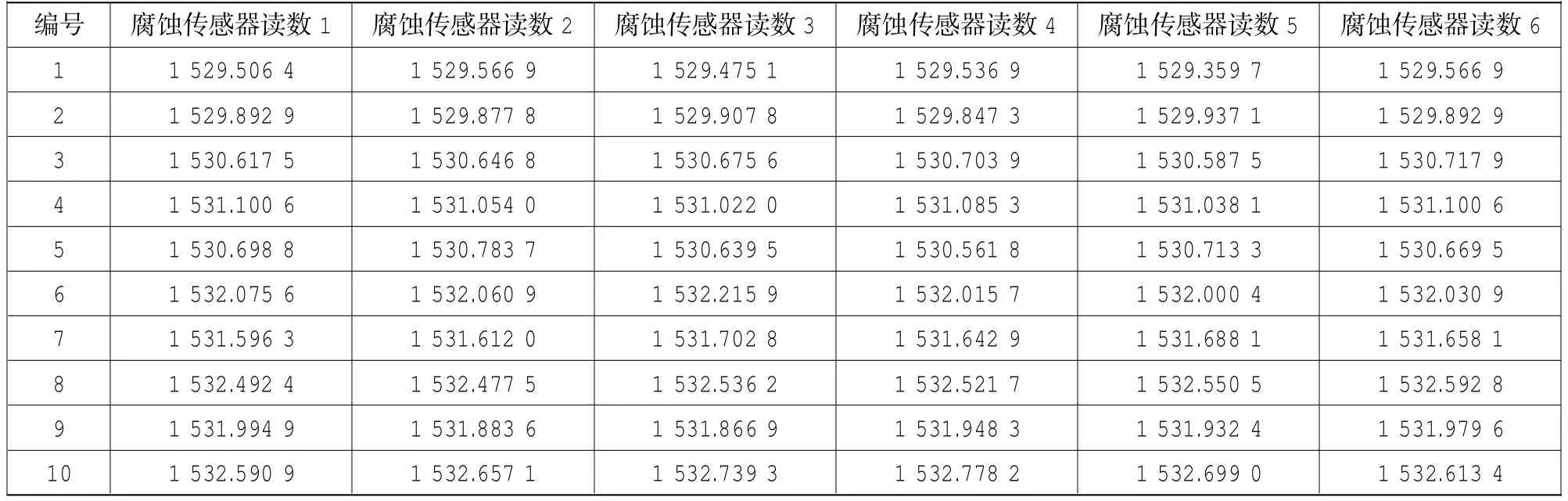
表2 腐蚀传感器采集的波长读数Table 2Wavelength of the corrosion sensorsnm
求解过程见表3。1)根据式(1)计算腐蚀传感器的波长变化量,然后通过式(2)计算腐蚀率。2)对各个传感器组监测到的腐蚀率值进行t检验,有效腐蚀率和异常腐蚀率均见表3。3)计算有效腐蚀率的均值及方差,并对均值进行一致性检验。4)根据上述结果及式(5)计算腐蚀率融合值。5)根据式(6)计算腐蚀率融合值的模糊区间。
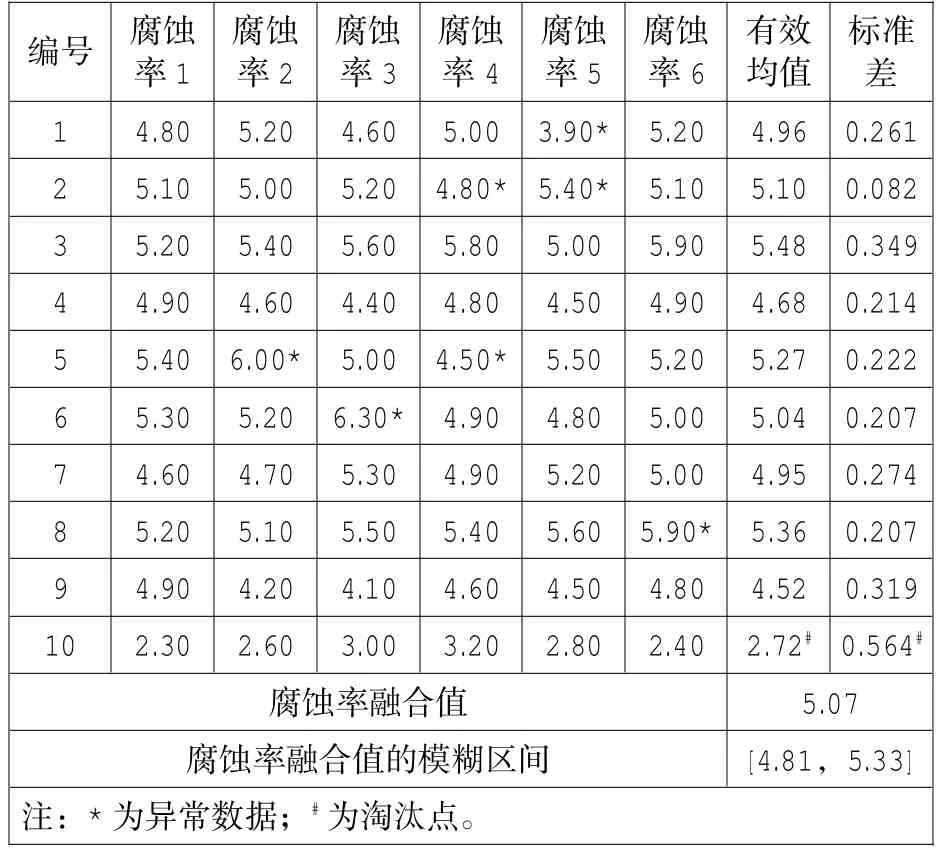
表3 传感器的腐蚀率数据Table 3Corrosion rate of the sensors %
由表3计算结果可知,本文方法有效剔除了算例中设置的异常数据,并淘汰不一致数据。为研究本文方法的有效性,对1号传感器数据进行扰动,并将其相对扰动与传统均值法的相对扰动进行比较。具体而言,假设1号传感器的腐蚀率读数1由1 529.506 4 nm变为1 529.356 4 nm,按本文方法计算所得腐蚀率融合值仍为5.07%,相对扰动为0;而用传统均值法计算时,腐蚀率平均值由原来的4.81%变为4.63%,相对扰动为3.7%。由此可见,与传统均值法相比,本文方法具有更强的抗干扰能力,计算结果精度更高。另外,模糊区间更能体现钢筋腐蚀不均匀的特点。综上所述,通过本文方法可有效处理光纤光栅钢筋腐蚀多传感器系统的数据。
3 结语
本文针对典型的光纤光栅钢筋腐蚀监测系统,提出一种多传感器监测数据处理方法,并通过算例验证了其有效性。监测数据处理的具体过程如下:
1)波长数据预处理:根据采集的波长信息确定波长变化量,接着通过波长变化量与腐蚀率的定量关系得到腐蚀率数据。
2)异常数据的检验与剔除:对从某传感器组得到的腐蚀率数据进行t检验,剔除异常数据,并计算有效数据的均值和方差,以腐蚀率均值代表传感器组h时间段的腐蚀率。
3)一致性检验:通过分布图法对n组传感器所得到的腐蚀率均值进行一致性检验,并根据相应的阀值淘汰掉无效数据。
4)Bayes数据融合:对经异常数据剔除和一致性检验所得的监测数据进行Bayes融合,获得腐蚀率融合值,作为某典型区域的腐蚀率。
5)模糊区间建立:根据模糊区间基本公式,确定某典型区域腐蚀率融合值的模糊区间,作为该区域的钢筋腐蚀率范围。
[1]曹承伟,赵铁军,刘洪珠,等.应用于钢筋混凝土腐蚀监测电化学传感器的发展与应用[J].混凝土,2016(8):156-160. CAO Cheng-wei,ZHAO Tie-jun,LIU Hong-zhu,et al.Development and application on steel corrosion monitoring of electrochemical sensors[J].Concrete,2016(8):156-160.
[2]张文锋,赵金山,马化雄,等.一种钢筋混凝土腐蚀监测用光纤传感器组合:中国,CN103616325B[P].2015-10-28. ZHANG Wen-feng,ZHAO Jin-shan,MA Hua-xiong,et al.Optical fiber sensor combination for monitoring corrosion of reinforced concrete:China,CN103616325B[P].2015-10-28.
[3]张文锋,马化雄,秦铁男,等.用于监测混凝土中钢筋腐蚀的光纤传感遥测系统:中国,CN203630020U[P].2014-06-04. ZHANG Wen-feng,MA Hua-xiong,QIN Tie-nan,et al.Optical fiber sensing remote metering system for monitoring reinforcement corrosion in concrete:China,CN203630020U[P].2014-06-04.
[4]周玉新.实验设计与数据处理[M].武汉:湖北科学技术出版社,2005:34-35. ZHOUYu-xin.Experimental designanddateprocessing[M].Wuhan: Hubei Science&Technology Press,2005:34-35.
[5]孙皓莹,蒋静坪.基于参数估计的多传感器数据融合[J].传感器技术,1995(6):32-36. SUN Hao-ying,JIANG Jing-ping.Multisensor data fusion based on parameter estimation[J].Journal of Transducer Technology,1995(6): 32-36.
[6]付华,杜晓坤.基于Bayes估计理论的数据融合方法[J].控制理论与应用,2005,24(4):10-12. FU Hua,DU Xiao-kun.Multi-sensor optimum fusion based on the Bayes estimation[J].Techniques of Automation and Application, 2005,24(4):10-12.
[7]吴小俊,曹奇英,陈保香,等.基于Bayes估计的多传感器数据融合方法研究[J].系统工程理论与实践,2000(7):45-48. WU Xiao-jun,CAO Qi-ying,CHEN Bao-xiang,et al.Study on multisensor data fusion methods based on Bayes estimation[J]. Systems Engineering Theory and Practice,2000(7):45-48.
[8]李俊.混凝土结构中钢筋腐蚀光纤光栅传感器设计与结构耐久性分析[D].南京:南京航空航天大学航空宇航学院,2008. LI Jun.Design of optical fiber grating sensors reinforcement corrosion and analysis for structure durability in concrete[D]. Nanjing:College of Aerospace Engineering of Nanjing University of Aeronautics and Astronautics,2008.
Monitoring data processing method of the fiber Bragg grating sensors for rebar corrosion
ZHANG Wen-feng,TANG Cong,YANG Tai-nian
(CCCC Tianjin Port Engineering Institute Co.,Ltd.,Tianjin Port Engineering Quality Testing Center,Tianjin 300222,China)
Fiber Bragg grating sensor has the advantages such as anti-interference ability,small size,high accuracy,high durability,etc.,and now it becomes the new hot spot of rebar corrosion monitoring technology research.Aiming at the typical fiber Bragg grating monitoring system for rebar corrosion,we presented a monitoring data processing method for multiple fiber Bragg grating sensors for rebar corrosion.The method includes the phases of wavelength data pre-processing(wavelength after compensating,variation of the wavelength and corrosion rate for rebar),abnormal data removing(Student′s t-test), consistency check(distribution display method),data fusion based on the Bayes estimation and fuzzy interval confirming for the fused corrosion rates,etc.And then,the effectiveness of the monitoring data processing method is validated by an example. Key words:fiber Bragg grating;rebar corrosion;monitoring;data processing;sensor
TU503
A
2095-7874(2017)07-0072-04
10.7640/zggwjs201707017
2017-04-06
2017-05-17
张文锋(1985—),男,江苏丹阳人,硕士,工程师,材料物理与化学专业,从事海洋腐蚀与防护研究。E-mail:zhwf528@163.com
猜你喜欢
中国交通信息化(2022年5期)2022-07-23
阅读(科学探秘)(2021年8期)2021-09-01
照明工程学报(2020年1期)2020-06-16
照明工程学报(2020年1期)2020-06-16
电子制作(2019年24期)2019-02-23
中国公路(2017年19期)2018-01-23
中国公路(2017年15期)2017-10-16
中国公路(2017年9期)2017-07-25
中国公路(2017年7期)2017-07-24
北方交通(2016年12期)2017-01-15
