
弹道导弹再入段动态RCS特性分析
2017-08-07 14:23张永顺张小宽
火力与指挥控制 2017年6期
盛 川,张永顺,张小宽
(空军工程大学防空反导学院,西安 710051)
弹道导弹再入段动态RCS特性分析
盛 川,张永顺,张小宽
(空军工程大学防空反导学院,西安 710051)
研究弹道导弹再入段动态RCS特性,有利于防空反导作战中对其进行有效探测和拦截。首先对弹道目标机动航迹进行建模,然后结合坐标转换公式获得目标姿态角变化,最后利用EDITFEKO软件实现对目标动态RCS实时仿真。针对不同再入角的机动航迹,仿真了不同雷达布站情况下目标动态RCS变化。仿真结果表明,弹道导弹侧向RCS大于正向RCS,反导预警雷达应部署在弹道导弹射程之内,使雷达对着弹道导弹侧面。仿真结果为反导预警雷达的部署提供依据。
弹道导弹,坐标转化,再入段,动态RCS
0 引言
弹道导弹凭借其射程远、精度高、威力大、突防能力强、机动性好等特点,成为战场上威力极强的进攻性武器,给防空反导作战带来严峻挑战。及时探测跟踪弹道目标,是防空反导作战的首要任务。弹道导弹飞行过程包括3个阶段,即上升段,中段和再入段。在弹道目标上升段和中段RCS特性研究上,文献[1]建立了弹道目标尾喷焰的等离子体模型,采用计算电磁学的矩量法计算了上升段弹道导弹尾喷焰的RCS特性;文献[2]采用准静态法结合矩量法仿真导弹在上升段的动态RCS;文献[3]采用物理光学法(PO)与等效电磁流法(MEC)相结合的方法快速计算上升段弹道导弹动态RCS序列,为上升段弹道目标识别提供依据;文献[4]基于中段动态RCS特性,对弹道目标的运动特性进行分析;文献[5-6]从中段弹道目标的运动学特性出发解算运动方位角,随后结合静态RCS的缩比模型测量数据和仿真数据,获得中段进动弹道目标的动态RCS特性;文献[7]提出一种计算近场动态RCS的新方法,用于研究超声速导弹在弹目交会末端的雷达散射特性。再入段目标再次进入大气层,受空气阻力影响不断减速,最有利于进行拦截,对于弹道目标再入段动态RCS特性的研究目前少有文献报道,研究再入段弹道目标动态RCS特性对于探测拦截弹道目标具有重要意义。本文结合再入段弹道目标轨迹对弹道目标动态RCS特性进行研究,并通过设置不同再入角,研究了不同雷达布站以及不同再入角对弹道目标动态RCS特性的影响。
1 坐标系与目标姿态角
1.1 雷达坐标系
雷达坐标系(如图1所示)定义在雷达上面,坐标原点oR位于雷达所在地,zR轴铅垂向上,xR轴和yR轴位于水平面内,选取正西方向为xR轴正方向,正南方向为yR轴正方向。

图1 雷达坐标系
1.2 目标坐标系
目标坐标系(如图2所示)定义在目标上面,坐标原点oT位于目标中心,xT轴与弹身轴线指向平行并指向前方。yT轴与目标对称平面相垂直,zT轴位于目标对称平面内,与xT轴垂直并指向上方。

图2 目标坐标系
目标姿态角定义如图2所示,方位角φ为雷达视线在oTxTyT平面上的投影与oTxT的夹角,其取值范围为[0°360°],其中 0°对应机头方向,180°对应机尾方向。俯仰角θ为雷达视线在oTxTyT平面上的投影与 oTxT的夹角,其取值范围为[-90°90°],其中-90°对应机腹方向,90°对应机背方向,俯仰角为0°时对应机身所在平面。
在目标飞行过程中,雷达位置在目标坐标系中是随着时间不断变化的,这是由目标在飞行过程中姿态不断变化所导致的。为了获得目标坐标系中反应目标姿态变化的方位角 φ(t)和俯仰角 θ(t)的变化,需要根据文献[8-10]中推导的坐标转换关系,将目标在雷达坐标系中的坐标转换到目标坐标系中的坐标。
2 基于EDITFEKO的目标动态RCS实时仿真方法
2.1 物理光学法介绍
目标RCS计算方法大体分为3类:严格解法、数值解法和高频近似解法。当进行高频散射计算时,采用严格解法和数值解法将花费大量时间且对计算机硬件配置要求太高。因而常采用高频近似解法。物理光学法是一种常用的高频近似解法,它是用散射体上的等效电流代替散射体,通过对表面感应场的近似和积分而求得散射场。
用物理光学法进行散射场计算时,总场的切向分量可以表示为:


进一步可以求出磁场表达式为:
远场条件下,散射场可以简化为

2.2 动态RCS实时仿真方法

图3 动态RCS实时仿真流程图
目标动态RCS实时仿真流程图如图3所示,首先对目标机动航迹进行建模,获得在雷达坐标系中目标坐标的变化,结合坐标转换关系获得在FEKO中定义的目标姿态角变化,最后,将变化所得的目标姿态角代入EDITFEKO中就能实时仿真出目标动态RCS序列。
3 弹道目标再入段动态RCS仿真
目标位于坐标原点o(0 km 0 km 0 km)处,弹道导弹在xoy平面内以再入角θ朝向目标方向飞行。雷达站部署在导弹射程之内称为前置雷达,部署在导弹射程之外称为后置雷达。前置雷达坐标为(100km,0km,0km),后置雷达坐标为(-100km,0km,0 km)。目标再入1:目标再入角为40°,航路捷径为0,再入段起点坐标为(95 km,0 km,80 km),终点坐标为(0 km,0 km,0 km);目标再入 2:目标再入角为50°,航路捷径为 0,再入段起点坐标为(65 km,0 km,80 km),终点坐标为(0 km,0 km,0 km);两种目标机动航迹如图4。由于航路捷径为0,通过坐标转换公式后,对于后置雷达,方位角恒为0,对于前置雷达,方位角先为0°,后为180°。两种机动下两种雷达部署的俯仰角变化如图5~图6所示。将目标姿态角代入EDITFEKO中实时仿真目标动态RCS变化如图7~图8所示。

图4 两种机动航迹示意图

图5 前置雷达测得目标俯仰角变化
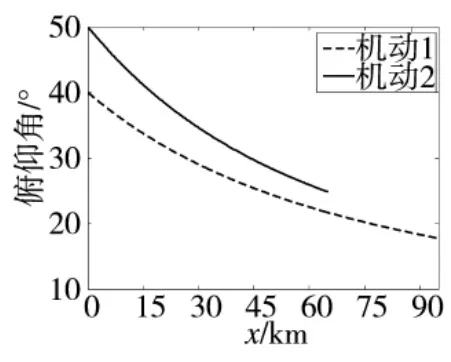
图6 后置雷达测得目标俯仰角变化

图7 再入角40°时目标动态RCS

图8 再入角50°时目标动态RCS
由目标动态RCS变化趋势可知,当雷达后置部署时,目标RCS小于-15 dB,这是因为雷达对着目标头向区域,目标的头向区域是强隐身区;后置雷达测得的目标RCS会有一个最小值点,此时雷达正对着目标头向;前置雷达能获得比后置雷达更大的目标RCS,因为前置雷达照射到目标的侧向区域,目标侧向区域RCS比头向区域RCS大;前置雷达测得的目标RCS会有一个最大值点,此时雷达正对着目标侧向;因此,反导预警雷达应该前置部署。由图7和图8对比可得,目标以不同再入角再入时,后置雷达测得其RCS变化不明显;前置雷达测得的目标RCS都会有一个最大值点18 dB,在该点雷达能实现对目标的探测。但是,再入角越大,最大值点出现的位置距离攻击目标越近,给雷达的反应时间就缩短;因此,弹道导弹在攻击目标时,对于防守方,应采取前置雷达部署;对于进攻方,应使导弹以较大的再入角再入。
4 结论
准确探测弹道导弹是对其进行有效拦截的前提,动态RCS特性分析有利于研究弹道目标的运动特性,从而合理部署雷达。下一步应将导弹全程的动态RCS特性结合起来,对不同阶段的运动特性进行分析研究。
[1]彭鹏,童创明,李丹,等.弹道导弹助推段尾喷焰RCS特性研究[J].现代防御技术,2013,41(5):22-26.
[2]彭鹏,童创明,孙佳佳,等.弹道导弹助推段动态RCS特征仿真[J].空军工程大学学报,2013,14(5):44-47.
[3]王童,童创明,彭鹏,等.基于轨迹特征的弹道主动段动态RCS 研 究 [J]. 弹 箭 与 制 导 学 报 ,2014,34(3):106-108,132.
[4]资文茂,毕义明,康璞.弹道导弹中段RCS控制研究[J].舰船电子工程,2012,32(7):82-84.
[5]孙佳佳,童创明,彭鹏,等.弹道中段进动目标动态RCS仿 真 研 究 [J]. 科 学 技 术 与 工 程 ,2013,13(16):4562-4566.
[6]姜卫东,曹敏,聂镭,等.空间目标动态电磁测量数据仿真方法研究 [J].系统工程与电子技术,2009,31(9):2042-2045.
[7]金桂玉,张京国,高宠,等.高速小目标近场动态RCS计算[J].航空兵器,2013,50(6):30-34.
[8]黄培康,殷红成,许小剑.雷达目标特性[M].北京:电子工业出版社,2005.
[9]周超,张小宽,张敬伟,等.典型隐身飞机动态RCS时间序列研究[J].空军工程大学学报,2013,14(3):15-18.
[10]周超,张小宽,吴国成.基于坐标转换目标动态RCS时间序列研究[J].火力与指挥控制,2014,39(3):56-59.
Dynamic RCS Characteristics Analysis of Ballistic Missiles in Reentry
SHENG Chuan,ZHANG Yong-shun,ZHANG Xiao-kuan
(School of Air and Missile Defense,Air Force Engineering University,Xi’an 710051,China)
Dynamic RCS characteristics of ballistic missiles in the reentry are researched,it benefits the validity detection and interception in air and missile defense combats.Firstly,the maneuvering flight path model of ballistic missiles is structured.Then,the change of posture angle is gotten by the conversion of coordinate formula.Lastly,the dynamic simulation is used by the EDITFEKO software.The dynamic RCS for ballistic missiles in different posture angles are simulated in different radars locations.The results show that the side RCS is larger than the forward RCS in ballistic missiles,providing foundation for the location of the surveillance radar for missile defense,which should be located within the range of ballistic missiles to detect them effectively.
ballistic missile,coordination conversion,reentry,dynamic RCS
TN953;TJ761.3
:A
10.3969/j.issn.1002-0640.2017.06.021
2016-05-13
:2016-06-20
盛 川(1979- ),男,湖南益阳人,副教授。研究方向:雷达信号处理及雷达干扰环境仿真。
1002-0640(2017)06-0093-03
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09
中国生殖健康(2020年5期)2021-01-18
数字海洋与水下攻防(2020年5期)2021-01-04
教书育人(2020年11期)2020-11-26
军事运筹与系统工程(2020年1期)2020-09-11
当代陕西(2020年13期)2020-08-24
家庭影院技术(2020年6期)2020-07-27
卫星与网络(2019年11期)2019-06-17
电子制作(2019年7期)2019-04-25
北京航空航天大学学报(2017年6期)2017-11-23
