
伞包拉出过程仿真及载荷影响分析
2017-08-01 11:10:29包进进雷江利贾贺
航天返回与遥感 2017年3期
包进进 雷江利 贾贺
(北京空间机电研究所,北京 100094)
伞包拉出过程仿真及载荷影响分析
包进进 雷江利 贾贺
(北京空间机电研究所,北京 100094)
航天器回收着陆过程中依靠减速伞将主降落伞伞包从伞舱中拉出是主降落伞顺利工作的第一步,也是航天器能否安全着陆至关重要的一步。释放减速伞后是通过作用在减速伞伞带及主降落伞伞包拖带上的拉力将主降落伞伞包从主伞舱中拉出的,在释放减速伞拉主降落伞伞包过程中将产生一个很大的载荷作用在减速伞伞带及主降落伞伞包拖带上。文章基于牛顿力学,通过建立释放减速伞后拉主降落伞伞包过程的动力学模型,计算出释放减速伞拉主降落伞伞包过程减速伞伞绳、吊带及主伞包拖带的拉力随时间的变化情况。通过仿真结果分析及与高塔投放试验结果比对,证明了仿真模型的符合性,并在此基础上研究了减速伞自由行程、释放减速伞时下落速度、伞带长度、伞带断裂强力、主伞包质量、减速伞尺寸等因素对伞带载荷的影响程度,根据影响分析结果得出可以通过减小减速伞自由行程、减小释放减速伞时速度、增加伞绳长度、减小伞带总断裂强力、减小主伞包质量、减小主伞包尺寸等设计方法来减小伞带载荷。文章的仿真结果可以为降落伞设计提供参考。
拉主伞包 伞绳 吊带 主伞包拖带 载荷 影响因素 回收着陆
0 引言
航天器回收着陆过程中依靠减速伞将主降落伞伞包从伞舱中拉出是主降落伞顺利工作的第一步,也是航天器能否安全着陆至关重要的一步[1-5]。航天器减速着陆应用的主降落伞在工作前是以折叠包装状态存储于主降落伞伞包中并置于航天器内部的主降落伞伞舱当中,当航天器进入大气层到达预定的时间点,回收着陆控制装置发送释放减速伞指令,减速伞释放后利用减速伞拉力将主降落伞伞包从主伞舱中拉出,并采用倒拉方式将伞带及伞衣依次有序拉直,随后伞衣充气,从而达到利用主降落伞气动阻力最终实现航天器减速至安全着陆速度的目的。
减速伞释放后是通过作用在减速伞伞带及主降落伞伞包拖带上的拉力将主降落伞伞包从主伞舱中拉出的,在释放减速伞拉主降落伞伞包过程中将产生一个很大的载荷作用在减速伞伞带及主降落伞伞包拖带上,这个载荷的评估结果直接关系着绳带设计载荷,在以往型号的研制过程中对减速伞释放拉主降落伞伞包的绳带载荷都是通过经验公式近似计算得到的,由于经验公式中对整个减速伞释放后拉主降落伞伞包过程是通过采用系列平均值进行简化计算,大量的简化平均可能会对计算结果产生较大影响。并且由于减速伞释放拉出主降落伞伞包并拉直主降落伞后,主降落伞伞包将随减速伞一起与主降落伞-航天器系统分离,这就导致拉伞包过程的绳带载荷很难在模拟真实工况下进行测量。
综合上述情况,本文基于牛顿经典力学通过建立减速伞释放后拉主降落伞伞包过程的动力学方程,计算出释放减速伞拉主降落伞伞包过程的减速伞伞绳、吊带及主伞包拖带的拉力随时间的变化情况,通过结果分析及与高塔投放试验结果比对,证明仿真结果的符合性,并在此基础上研究了拉力峰值的影响因素。本文的仿真结果可以为降落伞设计提供参考。
1 系统组成及连接形式
减速伞一般由减速伞伞衣、伞绳、中间连接件、连接带、吊带等部分组成,减速伞释放后,减速伞在其自身气动力作用下减速运动,并通过减速伞吊带与主伞包拖带之间的连接件拉动并拉直主伞包拖带,进而拉动主伞包出舱。
释放减速伞拉主伞包过程系统组成及连接形式如图1所示,包括减速伞伞衣、减速伞伞绳、减速伞吊带、减速伞伞绳和吊带间的连接件、主伞包拖带、减速伞吊带和主伞包拖带间的连接件、主伞包。文中所指的伞带为减速伞伞绳、减速伞吊带、主伞包拖带的统称。
2 动力学模型
2.1 基本假设
在减速伞拉主伞伞包过程中,受力情况十分复杂,本文的仿真工作中,进行如下简化假设:
1)减速伞和主伞包在每一瞬时的运动都遵循同一条轨迹,且运动方向与重力方向相同;
2)仅考虑重力、气动力、伞带拉力,不考虑主伞包和主伞舱间的摩擦阻力;
3)伞带只能拉伸不能压缩,在拉伸过程中的受力严格按照其材料试验获得的静态应力—应变曲线;
4)将主伞包视为刚体,不考虑受力过程中的柔性变形;
5)不考虑减速伞运动过程中的扭矩。
2.2 动力学模型
本仿真所建动力学模型[6-10]将减速伞组件、减速伞伞绳和吊带间的连接件、减速伞吊带和主伞包拖带间的连接件、主伞伞包视为质点,考虑减速伞伞绳、吊带和主伞包拖带为柔性带,取两个中间连接件为无限小质量点[11-16],如图2所示。
式中 v1为减速伞运动速度;t为物伞系统运动时间;Fs1为减速伞伞绳拉力;Fd为减速伞气动阻力;m1为减速伞质量(包括结构质量和附加质量[17-18]);gn为地球重力加速度;h1为减速伞距地面高度;v2为中间连接件1运动速度;Fs2为减速伞吊带拉力;m2为中间连接件1质量;h2为中间连接件距地面高度;v3为中间连接件 2运动速度;Fs3为主伞包拖带拉力;m3为中间连接件 2质量;h3为中间连接件2距地面高度;v4为主伞包运动速度;m4为主伞包质量;h4为主伞包距地面高度。
其中,当伞带受拉力伸长后伞带拉力计算模型如下:
式中 FSi为伞带拉力;ni为伞带根数;Fki为伞带断裂强力;εi为伞带断裂伸长率;Li为伞带拉伸后长度;Li0为伞带原长;i=1、2、3,其中i=1代表减速伞伞绳,i=2代表减速伞吊带,i=3代表主伞拖带;ki为中间变量。
3 模型验证
3.1 仿真结果校核
通过分析,减速伞释放拉主伞包的运动过程主要分为以下几个阶段:
阶段 1:返回器释放减速伞后,由于减速伞气动力大于减速伞重力,减速伞做减速运动,此时主伞包与返回舱以相同的加速度加速下落;
阶段 2:当主伞包拖带开始受力,主伞包的加速度开始小于返回舱加速度,主伞包与返回舱开始有相对速度,主伞包与返回舱开始分离,此时,由于带子的拉力小于减速伞气动力与减速伞重力的差,因此减速伞保持减速运动;
阶段3:当主伞包拖带的拉力开始大于主伞包的重力,主伞包开始减速运动;
阶段 4:当主伞包拖带拉力开始大于减速伞气动力与减速伞重力的差,减速伞速度达到最小值,减速伞开始加速运动,但此时主伞包速度大于减速伞速度,因此带子继续拉伸;
阶段 5:当减速伞速度与主伞包速度相同时,带子达到最大伸长量,开始回缩,此时,带子受到最大的拉力。
为了对仿真结果进行较核,首先选用相关系统参数及初始条件进行仿真计算,仿真结果如图3所示。
通过仿真结果可以看出主伞包拖带拉力峰值出现在减速伞速度与主伞包速度相等那一时刻,这与上述减速伞拉主伞包运动过程分析吻合。
3.2 高塔投放试验结果比对验证
为了验证伞带设计断裂强力,针对主伞包拉出过程进行了高塔投放试验,具体试验情况如图4所示。通过高塔投放试验测得主伞包投放过程中伞带的拉力。为了验证本文的动力学模型,针对此次高塔投放试验进行了两种工况下的仿真分析,具体工况的仿真结果为:
工况一:在下降高度为15m、图4中钢丝绳采用12m长的芳纶带条件下,伞带最大拉力试验结果为55kN,仿真结果为70kN,误差为27.3%;
工况二:在下降高度为30m、图4中钢丝绳采用17m长的芳纶带条件下,伞带最大拉力试验结果为83kN,仿真结果为99kN,误差为19.5%。
分析仿真结果与试验结果的偏差主要是仿真过程未考虑高塔塔壁上下晃动吸收的能量、以及高塔投放时主副钩间有距离使得伞包速度方向并非完全与重力方向一致等,因此仿真结果较试验结果偏大,根据仿真结果,采用修正系数来修正仿真结果与试验结果的偏差,修正系数取24%(即认为仿真结果较高塔投放测量结果偏大24%)。按修正系数进行修正后仿真结果与试验结果比对如下:
工况一:在下降高度为15m、钢丝绳为12m长的芳纶带条件下,伞带最大拉力试验结果为55kN,修正后结果为68.2kN,仿真结果为70kN,基本吻合;
工况二:在下降高度为30m、钢丝绳为17m长的芳纶带条件下,伞带最大拉力试验结果为83kN,修正后结果为102.9kN,仿真结果为99kN,基本吻合。
但实际飞行过程中不存在高塔投放试验过程中相关影响因素,因此,可以认为仿真动力学模型正确可行。
4 伞带载荷影响因素分析
为了进一步分析减速伞拉主伞包过程中伞带载荷峰值的影响因素及影响程度,本文从减速伞自由行程、释放减速伞时的舱伞系统速度、伞带长度、伞带断裂强力、主伞包质量、减速伞尺寸等几个设计因素仿真研究了其对主伞包最大拉力的影响程度。
4.1 减速伞自由行程
一般在减速伞释放到伞带拉直都会有一段减速伞自由运动阶段,此段自由行程的长短取决于减速伞吊挂点到主伞包间伞带布局方式和返回器姿态等,此阶段的减速伞和主伞包都不受伞带的拉力约束。本节主要研究减速伞自由行程对主伞包最大拉力的影响。仿真结果如表1和图5所示。
通过表1和图5可以看出,主伞包的最大拉力随着减速伞自由行程的增大而增加,增加趋势近似为线性增大。在自由行程0~1.2m范围内,最大拉力的最大值约为最小值的1.75倍。
综上,为了减小拉主伞包过程中的最大拉力,可以通过结构布局来减小减速伞的自由行程的方式实现。

表1 不同减速伞自由行程对应的主伞包最大拉力Tab.1 The maximum force of pulling main parachute pack with different drogue parachute free path
4.2 减速伞释放时下落速度
一般航天器回收过程中包含多种回收模式,不同的模式对应的减速伞释放时舱伞系统下落速度有很大差异,本节主要研究减速伞释放时舱伞系统的下落速度对主伞包最大拉力的影响。仿真结果见表2和图6所示。
通过表2和图6可以看出,主伞包的最大拉力随着释放减速伞时舱伞系统下落速度的增大而增加,增加趋势为线性增大。在下落速度为85~137m/s范围内,最大拉力的最大值约为最小值的2倍。
综上,为了减小拉主伞包过程中的最大拉力,可以通过选择较小的释放减速伞时舱伞系统下落速度来实现。在进行伞带断裂强力设计时要充分复核各种偏差和极限工况下的释放减速伞时舱伞系统最大下落速度对应的主伞包最大拉力。

表2 不同减速伞释放时舱伞系统下落速度对应的主伞包最大拉力Tab.2 The maximum force of pulling main parachute pack with different drogue parachute release velocity
4.3 伞带长度
不同任务对应的减速伞拉主伞包的伞带长度有很大差别,本节主要研究伞带长度对主伞包最大拉力的影响。仿真结果如表3和图7所示。由于本文采用的动力学模型中涉及的伞带包括减速伞伞绳、减速伞吊带、主伞包拖带,其中减速伞伞绳为13.1m,减速伞吊带为2.4m,主伞包拖带为0.75m,因此,减速伞伞绳较其他两种伞带的长度长很多,为了简化仿真,本节只针对减速伞伞绳的长度变化进行研究。

表3 不同的减速伞伞绳长度对应的主伞包最大拉力Tab.3 The maximum force of pulling main parachute pack with different suspension lines length
通过表3和图7可以看出,主伞包最大拉力对减速伞伞绳长度的增加而减小,减小趋势为近似线性减小。由于总伞带长度包括减速伞吊带和主伞包拖带的长度,而本次仿真这两部分伞带长度不变,因此可以认为主伞包最大拉力与伞带长度呈线性减小。
综上,为了减小拉主伞包过程中的最大拉力,可以通过适当的增大伞带长度的方式来实现。
4.4 伞带断裂强力
不同任务采用的伞带材料和根数不同,导致伞带的断裂强力不同。本节主要研究伞带断裂强力对主伞包最大拉力的影响。首先研究了主伞包拖带断裂强力对主伞包最大拉力的影响。仿真结果见表4和图8所示。

表4 不同的主伞包拖带断裂强力对应的主伞包最大拉力Tab.4 The maximum force of pulling main parachute pack with different bridle harness intensity
通过表4和图8可以看出,主伞包最大拉力受主伞包拖带断裂强力的影响不大,这主要是由于伞带的组成中大部分是由减速伞伞绳和减速伞吊带组成。因此为了进一步研究伞带的断裂强力对主伞包最大拉力的影响,本节采用不同标称伞带设计断裂强力的倍数对应的伞带断裂强力进行仿真,仿真结果见表5和图9所示。
通过表5和图9可以看出,主伞包最大拉力随伞带断裂强力的增大而增大,其中,主伞包最大拉力与标称设计伞带断裂强力的倍数呈线性增加关系。
综上,为了减小主伞包最大拉力,单独调整主伞包拖带的断裂强力是不起作用的,但可以通过减小整个伞带各部分的断裂强力的方式来实现。

表5 不同的伞带断裂强力对应的主伞包最大拉力Tab.5 The maximum force of pulling main parachute pack with different suspension and bridle intensity
4.5 主伞包质量
不同任务对应的主降落伞不同,导致主降落伞质量不同,本节主要研究主伞包质量对主伞包最大拉力的影响。仿真结果如表6、图10和图11所示。
通过表6、图10和图11可以看出,在主伞包正常的质量范围内,主伞包最大拉力随主伞包质量的增加而增大,但当主伞包质量急剧增大的情况下(此种情况为主伞包卡滞、未出舱情况),主伞包最大拉力将不再明显增加。
通过上述结论,可以在确定了减速伞方案和与主伞包连接方案后,可以计算得到拉主伞包过程中作用在伞带上的极限拉力。

表6 不同的主伞包质量对应的主伞包最大拉力Tab.6 The maximum force of pulling main parachute pack with different main parachute pack mass
4.6 减速伞尺寸
减速伞尺寸也是影响主伞包最大拉力的因素之一,本节主要研究减速伞尺寸对主伞包最大拉力的影响。仿真结果见表7和图12所示。
通过表7和图12可以看出,主伞包最大拉力随着减速伞名义直径的增加而增大,并呈线性增长。因此,更大的减速伞将带来更大的主伞包最大拉力。
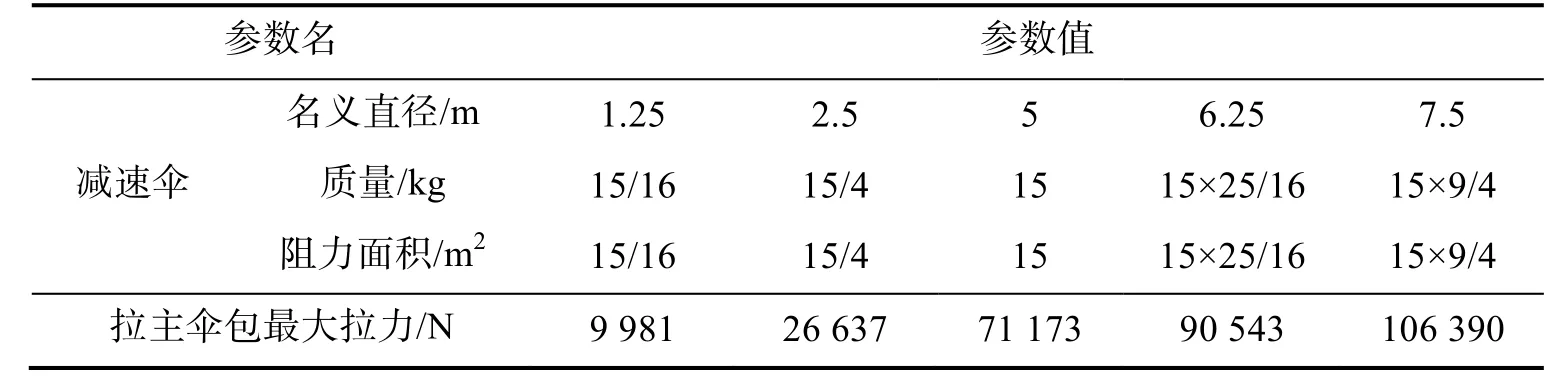
表7 不同的减速伞尺寸对应的主伞包最大拉力Tab.7 The maximum force of pulling main parachute pack with different drogue parachute sizes
5 结论
1)主要研究了减速伞自由行程、释放减速伞时的舱伞系统速度、伞带长度、伞带断裂强力、主伞包质量、减速伞尺寸等几个设计因素对主伞包最大拉力的影响,具体的结论如下:
2)主伞包的最大拉力随着减速伞自由行程的增大而增加,增加趋势近似为线性增大。在自由行程0~1.2m范围内,最大拉力的最大值约为最小值的1.75;
3)主伞包的最大拉力随着释放减速伞时舱伞系统下落速度的增大而增加,增加趋势为线性增大。在下落速度为85~137m/s范围内,最大拉力的最大值约为最小值的2;
4)主伞包最大拉力随伞带长度的增加而减小,增加趋势为线性减小;
主伞包最大拉力随伞带断裂强力的增大而增大,其中,主伞包最大拉力与标称设计伞带断裂强力的倍数呈线性增加关系;
5)在主伞包正常的质量范围内,主伞包最大拉力随主伞包质量的增加而增大,但当主伞包质量急剧增大的情况下(此种情况为主伞包卡滞、未出舱情况),主伞包最大拉力将达到极限值、不再明显增加;
6)主伞包最大拉力随着减速伞名义直径的增加而增大,并呈线性增长。
References)
[1]林斌. “神舟号”载人飞船降落伞系统[C]//中国空间科学学会空间探测专业委员会第十八次学术会议论文集. 重庆, 2005: 31-37. LIN Bin. Shenzhou Manned Spacecraft Parachute System[C]//China’s Space Science Society Space Exploration Professional Committee of 18thConference Proceedings, Chongqing, 2005: 31-37. (in Chinese)
[2]宋旭民, 程文科, 彭勇, 等. 飞船回收过程动力学建模与仿真[J]. 弹道学报, 2005, 17(2): 55-59. SONG Xumin, CHENG Wenke, PENG Yong, et al. Dynamic Modelization and Simulation of Spaceship Recovery Scenario[J]. Journal of Ballistics, 2005, 17(2): 55-59. (in Chinese)
[3]贾贺, 荣伟, 江长虹. 探月三期月地高速再入返回器降落伞减速系统设计与实现[J]. 中国科学·技术科学, 2015, 45(2): 185-192. JIA He, RONG Wei, JIANG Changhong. The Design and Implementation of the Parachute Deceleration System on the Circumlunar Return and Reentry Spacecraft of 3rdPhase of China Lunar Exploration Program[J]. Scientia Sinica·Technologica, 2015, 45(2): 185-192. (in Chinese)
[4]汪小卫, 张普卓, 吴胜宝, 等. 运载火箭子级回收技术研究[J]. 航天返回与遥感, 2016, 37(3): 19-28. WANG Xiaowei, ZHANG Puzhuo, WU Shengbao, et al. Recovery Technology of Launch Vehicle Stage[J]. Spacecraft Recovery & Remote Sensing, 2016, 37(3): 19-28. (in Chinese)
[5]孙晓娟. 无人机伞降回收技术[C]//2006中国无人机大会论文集. 北京, 2006: 668-673. SUN Xiaojuan. Unmanned Aerial Vehicle Parachute Recovery Technology[C]//2006 China’s Unmanned Aerial Vehicle Conference Proceedings. Beijing, 2006: 668-673. (in Chinese)
[6]林斌. 降落伞伞包载荷分析计算[J]. 航天返回与遥感, 2005, 26(1): 14-17. LIN Bin. Load Analysis for Parachute Bag[J]. Spacecraft Recovery & Remote Sensing, 2005, 26(1): 14-17. (in Chinese)
[7]王利荣. 降落伞理论与应用[M]. 宇航出版社, 1997: 318-319. WANG Lirong. Parachute Theory and Application[M]. China Astronautic Publishing House, 1997: 318-319. (in Chinese)
[8]EWING E G, BIXBY H W. 回收系统设计指南[M]. 吴天爵, 马宏伟, 译. 航空工业出版社, 1998: 225-242. EWING E G, BIXBY H W. Recovery System Design Guide[M]. Translated by: WANG Tianjue, MA Hongwei. Aviation Industry Press, 1998: 225-242. (in Chinese)
[9]JOHN S P, GEORGE C G. Effect of Suspension Line Elasticity on Parachute Loads[J]. Journal of Spacecraft and Rockets, 1970, 7(10): 1278-1280.
[10]MOULIN J. Recovery System Simulation: Link Modelization[C]//AIAA 12thAerodynamic Decelerator Systems Technology Conference and Seminar, 1993: 296-304.
[11]余莉, 史献林, 袁文明. 牵顶伞在降落伞拉直过程中的作用[J]. 南京航空航天大学学报, 2009, 41(2): 198-201. YU Li, SHI Xianlin, YUAN Wenming. Effects of Parachute Deployment Using Attached Apex Drogur[J]. Journal of Nanj-ing University of Aeronautics & Astronautics, 2009, 41(2): 198-201. (in Chinese)
[12]王从磊, 孙建红, 喻东明. 阻力伞拉直过程的影响因素分析[J]. 南京航空航天大学学报, 2013, 45(2): 196-201. WANG Conglei, SUN Jianhong, Yu Dongming. Analysis of Effect Factors on Deployment of Drag Parachute[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2013, 45(2): 196-201. (in Chinese)
[13]鲁媛媛, 荣伟, 吴世通. 火星环境下降落伞拉直过程的动力学建模[J]. 航天返回与遥感, 2014, 35(1): 29-36. LU Yuanyuan, RONG Wei, WU Shitong. Dynamic Modeling of Parachute Deployment in Mars Environment[J]. Spacecraft Recovery & Remote Sensing, 2014, 35(1): 29-36. (in Chinese)
[14]张青斌, 彭勇, 程文科, 等. 降落伞拉直过程的质量阻尼弹簧模型[J]. 弹道学报, 2003, 15(1): 31-36. ZHANG Qingbin, PENG Yong, CHENG Wenke, et al. A Mass Spring Damper Model of Parachute Deployment[J]. Journal of Ballistics, 2003, 15(1): 31-36. (in Chinese)
[15]宋旭民, 秦子增, 程文科, 等. 具有倒“Y”型吊挂的降落伞系统动力学建模[J]. 国防科技大学学报, 2005, 27(5): 103-106. SONG Xumin, QIN Zizeng, CHENG Wenke, et al. The Dynamic Model of a Parachute System with the Inverted 'Y' Suspension[J]. Journal of National University of Defense Technology, 2005, 27(5): 103-106. (in Chinese)
[16]张青斌, 程文科, 彭勇, 等. 降落伞拉直过程的多刚体模型[J]. 中国空间科学技术, 2003, 4(2): 45-50. ZHANG Qingbin, CHEN Wenke, PENG Yong, et al. A Multi-rigid-body Model of Parachute Deployment[J]. Chinese Space Science and Technology, 2003, 4(2): 45-50. (in Chinese)
[17]黄伟. 降落伞附加质量的计算方法[J]. 航天返回与遥感, 2016, 37(2): 42-50. HUANG Wei. Calculation Methods of Added Mass of Parachute[J]. Spacecraft Recovery & Remote Sensing, 2016, 37(2):42-50. (in Chinese)
[18]熊菁, 秦小波, 程文科. 降落伞系统附加质量的研究[J]. 中国空间科学技术, 2002, 8(4): 32-38. XIONG Jing, QIN Xiaobo, CHENG Wenke. The Added Mass Research in Parachute System[J]. Chinese Space Science and Technology, 2002, 8(4): 32-38. (in Chinese)
Simulation of Pulling Main Parachute Pack and Influencing Factors Analysis on Loads
BAO Jinjin LEI Jiangli JIA He
(Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)
Pulling out the main parachute pack by a successful released drogue parachute is a crucial step in recovery process of spacecraft. Large load on suspension lines, bridle legs, and bridle harness has been encountered. In this paper, by the dynamic model of drogue parachute release and pulling main parachute pack after releasing the drogue parachute, the load on suspension lines, bridle legs, bridle harness is calculated. Simulation model is confirmed by the results analysis and comparison with tower drop test data. The influences of drogue parachute free path and release velocity, suspension lines length, suspension and bridle intensity, main parachute pack weight and drogue parachute size on the load have been studied based on simulation results. The results of the analysis indicate that reduced drogue parachute free path and release velocity, increased suspension lines length, reduced suspension and bridle intensity, reduced main parachute pack weight, and reduced drogue parachute size can decrease the suspension and bridle load. The simulation results in this paper can provide theoretical basis for parachute design.
pull main parachute pack; suspension lines; bridle legs; bridle harness; Load; Influencing factors; recovery and landing
V275
A
1009-8518(2017)03-0031-12
10.3969/j.issn.1009-8518.2017.03.004
包进进,女,1984年生,2011年获中国空间技术研究院航天器返回与着陆专业硕士学位,工程师。研究方向为航天器返回与着陆技术。E-mail: bjj0524@163.com。
(编辑:刘颖)
2017-01-03
猜你喜欢
水上消防(2021年4期)2021-11-05 08:51:28
浙江医学(2020年24期)2020-02-03 09:10:38
凤凰生活(2019年10期)2019-10-14 03:28:35
北京青年周刊(2018年38期)2018-09-25 11:42:48
小资CHIC!ELEGANCE(2017年21期)2018-03-30 06:57:54
小溪流(画刊)(2017年11期)2018-01-09 19:15:50
创新作文(1-2年级)(2016年12期)2016-12-26 12:48:40
江南诗(2015年3期)2015-06-01 17:17:00
高中生·青春励志(2014年11期)2014-11-25 10:07:24
科技传播(2014年15期)2014-08-30 17:00:55
