
纳米光栅微陀螺噪声分辨率分析
2017-07-31 16:10李孟委吴倩楠
中北大学学报(自然科学版) 2017年2期
王 宾, 李孟委, 吴倩楠, 耿 浩, 王 高
(1. 中北大学 电子测试技术国家重点实验室, 山西 太原 030051; 2. 中北大学 仪器与电子学院, 山西 太原 030051;3. 中北大学 微系统集成研究中心, 山西 太原 030051; 4. 中北大学 理学院, 山西 太原 030051)
纳米光栅微陀螺噪声分辨率分析
王 宾1,2,3, 李孟委1,2,3, 吴倩楠3,4, 耿 浩1,3, 王 高3
(1. 中北大学 电子测试技术国家重点实验室, 山西 太原 030051; 2. 中北大学 仪器与电子学院, 山西 太原 030051;3. 中北大学 微系统集成研究中心, 山西 太原 030051; 4. 中北大学 理学院, 山西 太原 030051)

纳米光栅; 微陀螺; 动力学; 灵敏度; 噪声分辨率
微机械(MEMS)陀螺广泛应用于航空、 航天、 兵器、 装备等国防军事领域[1-2], 其主要是对微弱哥氏力引起的微位移或微应力进行高灵敏检测.

据国外桑迪亚实验室的研究显示[7-9], 基于纳米光栅的位移检测技术具有高分辨率与低噪声的特点, 其分辨率可达飞米级, 远远高于电容检测技术的纳米级位移检测分辨率. 而将纳米光栅应用于MEMS陀螺微位移检测, 可以解决微弱哥氏力的检测难题. 本文介绍了一种基于纳米光栅检测的MEMS陀螺的设计方法, 通过MATLAB软件中的SIMULINK模块对其进行系统级仿真与计算, 得到该微陀螺的灵敏度、 噪声等参数, 从理论上证明了基于纳米光栅的微陀螺具有高灵敏度和低噪声的特点, 为高性能的微陀螺检测技术提供了理论支持.
1 纳米光栅微陀螺工作原理
纳米光栅微陀螺工作原理如图 1 所示. 首先, 内框带动质量块在X方向谐振, 当检测到Z轴角速度, 质量块将受到Y方向的哥氏力作用, 致使可动光栅相对于固定光栅发生位移, 微弱的距离变化将导致透过纳米光栅的衍射光强发生剧烈变化, 因此光电探测器通过探测衍射光强的变化来对微弱哥氏力进行高精度检测.
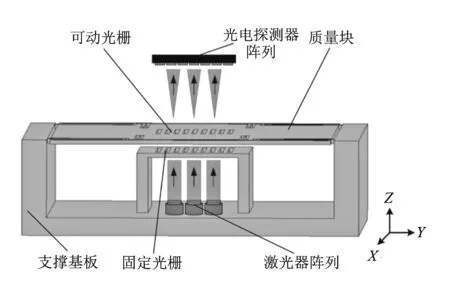
图 1 纳米光栅微陀螺工作原理示意图Fig.1 Schematic of micro-gyroscopebased on nano-gratings
2 纳米光栅微陀螺的动力学分析
微陀螺的动力学简化模型如图 2 所示.

图 2 微陀螺的动力学简化模型Fig.2 Dynamic model of micro-gyroscope
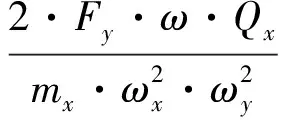
根据图 2 可得到微陀螺的动力学方程为[10]
式中:F0为驱动力幅值大小;ω为驱动力的角频率;mx,my分别为微陀螺驱动方向的质量和检测方向的质量;cx,cy分别为微陀螺驱动方向的阻尼和检测方向的阻尼;kx,ky分别为微陀螺驱动模态的刚度和检测模态的刚度;Ω为输入的角速度. 通过求解式(1)和式(2), 可以得到微陀螺在驱动方向的稳态幅值Bx和检测方向的幅值By分别为
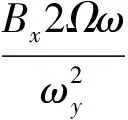
式中:Qx为驱动方向的品质因数值;ωx为驱动模态的角频率;Qy为检测方向的品质因数;ωy为检测模态的角频率.
最终计算得到纳米光栅微陀螺结构灵敏度

3 纳米光栅微陀螺灵敏度设计
3.1 纳米光栅微陀螺灵敏度规划
纳米光栅微陀螺的灵敏度分配如图 3 所示, 通过对微陀螺总灵敏度的分配可以对结构灵敏度、 衍射灵敏度和光电探测灵敏度进行规划.

图 3 灵敏度分配图Fig.3 The diagram of distribution of the sensitivity
灵敏度之间的关系如式(6)所示,
S=S结构×S衍射×S光电探测.
3.2 结构灵敏度设计
纳米光栅微陀螺结构如图 4 所示, 微陀螺结构尺寸参数如表 1 所示.

图 4 纳米光栅微陀螺结构Fig.4 The structure of micro-gyroscopebased onnano-gratings
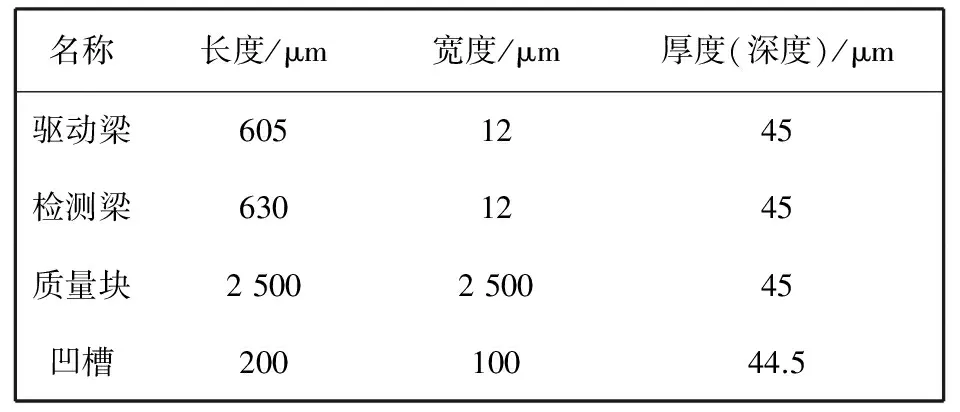
名称长度/μm宽度/μm厚度(深度)/μm驱动梁6051245检测梁6301245质量块2500250045凹槽20010044.5
在ANSYS软件中对纳米光栅微陀螺进行模态仿真, 其结果前二阶截图如图 5 所示, 微陀螺的固有频率值如表 2 所示.

表 2 微陀螺固有频率值

图 5 微陀螺模态仿真Fig.5 Mode simulation of micro-gyroscope
在ANSYS软件中, 对纳米光栅微陀螺进行瞬态仿真分析, 结果如图 6 所示.
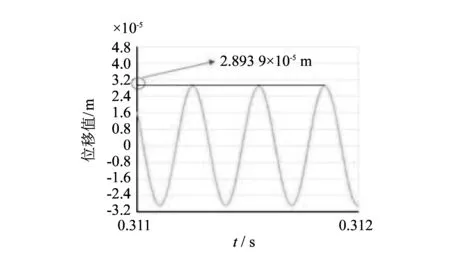
图 6 驱动方向位移分析Fig.6 The displacement analysis of drive direction
在图 6 中, 微陀螺的Bx为2.893 9×10-5m. 计算得到检测方向的品质因数Qy为444.98, 代入式(5), 则
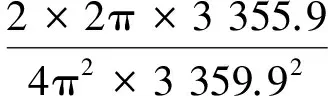
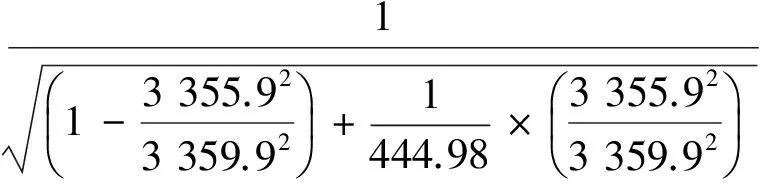
21.27 nm/°/s.
由式(5)计算得到微陀螺的结构灵敏度达到了21.27nm/°/s.
3.3 衍射灵敏度设计
为了实现对衍射灵敏度的设计, 先要完成对光栅结构的设计. 如图 7 所示的双层光栅结构示意图, 本文要设计的参数包括:纳米光栅厚度d, 纳米光栅周期Λ, 纳米光栅占空比, 上下两层光栅的间隙g, 入射光的波长λ. 纳米光栅的结构参数决定了光透过纳米光栅的衍射效率大小.

图 7 双层光栅结构示意图Fig.7 The diagram of double-layer gratings structure
利用光学仿真软件Gsolver对双层纳米光栅结构进行仿真计算[11-13], 通过控制变量法对纳米光栅结构的各个几何参数进行设计, 最终取最大衍射效率的纳米光栅结构尺寸, 如表 3 所示.

表 3 纳米光栅结构尺寸表
在上述纳米光栅的结构尺寸下, 通过Gsolver仿真软件得到该可动纳米光栅的位移与零级衍射效率的关系如图 8 所示.
由图 8 可以看出, 当可动纳米光栅位移在0~3 200 nm 内时, 透射光、 反射光的衍射效率随可动纳米光栅位移呈现周期性变化.

图 8 可动纳米光栅位移与衍射效率关系图Fig.8 Curve of displacement and diffraction efficiency of movable nano-grating
通过计算可得纳米光栅的衍射效率变化率为0.175%/nm. 本文设计的纳米光栅微陀螺拟采用VCSEL激光器作为光源, 该款激光器的功率为1 mW, 得到纳米光栅微陀螺的衍射灵敏度为:0.175%/nm×1 mW=0.001 75 mW/nm.
3.4 光电探测灵敏度设计
采用索雷博公司生产的光电探测器作为该纳米光栅微陀螺的光强接收装置, 该光电探测器的光电探测灵敏度为1 000 V/W.
3.5 纳米光栅微陀螺灵敏度计算
通过对3个灵敏度分析, 依据式(6)得
S=S结构×S衍射×S光电探测=
21.27 nm/°/s×0.001 75 mW/nm×
1 000 V/W=37 mV/°/s.
4 纳米光栅微陀螺系统级设计
4.1 纳米光栅微陀螺灵敏度仿真
如图 9所示为在SIMULINK中, 纳米光栅微陀螺系统级仿真模型.
先在纳米光栅微陀螺的驱动方向加一个正余弦的驱动力, 输入1°/s的角速率, 根据哥氏效应会产生哥氏力. 通过纳米光栅微陀螺的系统级仿真, 最终可得图 10 的仿真结果.

图 9 纳米光栅微陀螺系统级仿真模型Fig.9 The system-level simulation model ofmicro-gyroscopebased on nano-gratings
如图 10(c) 所示, 最终得到纳米光栅微陀螺微陀螺的灵敏度为37mV/°/s.
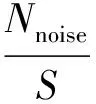
4.2 纳米光栅微陀螺噪声分辨率分析
微陀螺噪声分辨率的计算公式[14]为


5 结 论
[1]褚伟航, 白晓晓, 蒋孝勇, 等. 谐振式巨磁阻微机械陀螺噪声分析[J]. 中北大学学报(自然科学版), 2016, 37(2): 142-149. Chu Weihang, Bai Xiaoxiao, Jiang Xiaoyong, et al. Design and noise analysis of a MEMS gyroscope based on Giant Magnetoresistance effect detection[J]. Journal of North University of China (Natural Science Edition), 2016, 37(2): 142-149. (in Chinese)
[2]曹慧亮, 李宏生, 王寿荣, 等. MEMS陀螺仪结构模型及系统仿真[J].中国惯性技术学报, 2013, 21(4): 524-529. Cao Huiliang, Li Hongsheng, Wang Shourong, et al. Structure model and system simulation of MEMS gyroscope[J]. Journal of Chinese Inertial Technology, 2013, 21(4): 524-529. (in Chinese)
[3]Liu X S, Yang Z C, Chi X Z, et al. An x-axis micromachined gyroscope with doubly decoupled oscillation modes[C]. 21st International Conference on Micro Electro Mechanical Systems, IEEE, 2008: 860-863.
[4]Han F T, Liu Y F, Wang L, et al. Micromachined electrostatically suspended gyroscope with a spinning ring-shaped rotor[J]. Journal of Micromechanics and Microengineering, 2012, 22(10): 430-435.
[5]Xie J B, Shen Q, HaoY C, et al. Design, fabrication and characterization of a low noisezaxis micromachined gyroscope[J]. Microsystem Technologies, 2015, 21(3): 625-630.
[6]吴学忠, 刘宗林, 李圣怡. 微硅陀螺性能影响因素及其对策研究[J].微纳电子技术, 2003, 40(7): 274-276. Wu Xuezhong, Liu Zonglin, Li Shengyi. Influence factors and enhancement on property of micro-silicon gyroscope[J]. Micronanoelectronic Technology, 2003, 40(7): 274-276. (in Chinese)
[7]Krishnamoorthy U, Olsson R H, Bogart G R, et al. In-plane MEMS-based nano-g accelerometer with sub-wavelength optical resonant sensor[J]. Sensors and Actuators A: Physical, 2008, 145: 283-290.
[8]Carr D W, Sullivan J P, Friedmann T A. Femtophotonics: optical transducers utilizing novel subwavelength dual layer grating structure[C]. Processing of the Hilton Head Solid-State Sensors, Actuators, and Microsystems Workshop, South Carolina, 2004: 91-92.
[9]Carr D W, Sullivan J P, Friedmann T A. Laterally deformable nanomechanical zeroth-order gratings: anomalous diffraction studied by rigorous coupled-wave analysis[J]. Optics Letters, 2003, 28(18): 1636-1638.
[10]李孟委. 基于砷化镓的介观压阻效应微机械陀螺研究[D]. 太原: 中北大学, 2010.
[11]王茹. 亚波长金属光栅的导模共振和异常透射特性研究[D]. 哈尔滨: 哈尔滨工业大学, 2015.
[12]聂娅. 亚波长介质光栅的导模共振效应特性研究[D]. 成都: 四川大学, 2001.
[13]桑田, 王占山, 吴永刚, 等. 亚波长介质光栅导模共振研究[J]. 光子学报, 2006, 35(5): 641-645. Sang Tian, Wang Zhanshan, Wu Yonggang, et al. Research on guided mode resonance of sub-wavelength dielectric gratings [J]. Acta Photonica Sinica, 2006, 35 (5): 641-645. (in Chinese)
[14]蒋庆华, 苑伟政, 李晓莹. 电容式z轴微机械陀螺的噪声抑制[J]. 微纳电子技术, 2009, 46(10): 616-620. Jiang Qinghua, Yuan Weizheng, Li Xiaoying. Noise reduction of capacitivez-axis microgyroscopes[J]. Micronanoelectronic Technology, 2009, 46(10): 616-620. (in Chinese)
Noise Resolution Analysis of Micro-Gyroscope Based on Nano-Gratings
WANG Bin1,2,3, LI Meng-wei1,2,3, WU Qian-nan3,4, GENG Hao1,3, WANG Gao3
(1. Science and Technology on Electronic Test & Measurement Laboratory,North University of China, Taiyuan 030051, China;2. School of Instrument and Electronics, North University of China, Taiyuan 030051, China;3. Center for Microsystem Intergration North University of China, North University of China, Taiyuan 030051, China;4. School of Science, North University of China, Taiyuan 030051, China)

nano-gratings; micro-gyroscope; dynamic; sensitivity; noiseresolution
2016-08-16
国家自然基金面上资助项目(61573323)
王 宾(1991-), 男, 硕士生, 主要从事MEMS陀螺与光栅位移传感器的研究.
李孟委(1975-), 男, 副教授, 博士, 主要从事新原理MEMS惯性传感器及导航的研究.
1673-3193(2017)02-0225-06
TP212
A
10.3969/j.issn.1673-3193.2017.02.023
猜你喜欢
中国交通信息化(2022年5期)2022-07-23
今日农业(2021年16期)2021-11-26
支部建设(2021年18期)2021-08-20
发明与创新(2021年17期)2021-07-05
意林(儿童绘本)(2020年1期)2020-02-14
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
电子制作(2019年24期)2019-02-23
军事文摘(2018年24期)2018-12-26
快乐语文(2018年36期)2018-03-12
