
一种礼炮炮管自动清洗的装置
2017-07-25 10:10张媛玲李云怡
中国科技纵横 2017年12期
张媛玲++李云怡

摘 要:礼炮,是举行隆重庆典或欢迎贵宾表示敬礼时所放的炮。礼炮炮管较普通管道因膛线这一特殊结构存在擦拭困难的问题。而炮管擦拭对礼炮提高精度、延长使用寿命的作用和意义非常重大。现有的火炮擦拭方法主要有:人工擦拭、半自动擦拭和全自动擦拭。本文提出一款高效、智能的新型炮管擦拭机器人,其主要由自适应旋转钢刷头、自适应往复擦洗头和自适应全驱动六轮行走机构三大部分组成,分别由独立的电机进行驱动,由单片机统一控制三大部分协调工作,具有自动检测、自动适应炮管半径、自动清洗、自动回收的特点,应用前景将非常广阔。
关键词:炮管擦拭;全自动;自适应
中图分类号:TE937 文献标识码:A 文章编号:1671-2064(2017)12-0029-02
1 引言
随着技术的发展,礼炮的应用越来越广泛。民用礼炮主要使用可燃性气体和助燃气体的混合物在密闭环境下爆炸,瞬间产生巨响。军械礼炮则类似火炮,采用榴弹、发烟弹等作为发射药。礼炮炮管如不经常擦拭,则易导致炮管易锈蚀或卷入杂质,出现螺线磨损,严重影响炮弹发射的准确性、可靠性以及炮管的使用寿命,严重时引发炮管涨膛甚至炸膛。此外,电子礼炮炮管受潮易造成礼炮点火困难,严重时还会造成电脑主板烧坏而使功能失效。擦拭炮管内膛可以有效防止锈蚀和减小磨损,保证礼炮的使用寿命、安全性、可靠性以及精度。
擦拭剂以前多用机械擦洗,清洁效果不好且易损失炮管。目前常用的清洗方式有:手工清洗、半自动清洗和全自动清洗。人工手动擦拭直接采用人力逐段往复推拉刷子进行擦拭。该方法简单实用,但是费时费力,还可能损失内膛。半自动擦拭就是由人控制擦拭刷头,操作控制装置进行擦拭,擦拭动力由电动或气动提供。全自动擦拭指除了准备工作需要由人完成以外,其他的擦拭工作完全由机器完成,从而实现无人化擦拭,这样一个人就能同时擦拭多台礼炮,效率大大提高。
2 方案设计
2.1 整体设计思路
本文结合炮管的结构特点以及清洗要求,对礼炮炮管自动清洗装置提出如下设计要求:(1)能够在多种口径不同的炮管上作业,具有很强的互换性;(2)可以强力刮松固留在炮管内的杂物,反复擦洗上防护油;(3)检测炮管清洁度,确保无残余杂质和水分。
根据以上要求,拟采取如下设计:(1)通过在炮管行走机器人装载擦拭机构,采用全自动的控制方式取代现有的手工清洗、半自动清洗等效率较低的方式,从而提高炮管擦拭的效率。(2)通过采用喷洒擦抹剂、鋼刷刮松和清洗布擦拭三步一体的擦拭方式,结合清洁度检测系统实时检测擦拭效果,提高炮管擦拭的质量。(3)通过自适应六轮全驱动行走机构、自适应旋转钢刷头、自适应往复擦洗头,适应多样化的擦拭口径,实现一机多用。
2.2 机械结构设计
本设计机械结构部分主要由自适应往复擦洗头、六轮全驱动自适应行走机构、自适应旋转钢刷头和装在机器人两端的自适应万向轮导向机构组成。由于炮管内壁有着复杂的螺旋线,为了使机器人能够在凹凸不平的内管壁行走顺畅,在机器人的前后两端增加了万向轮导向机构,引导机器人的前进。本设计的整体结构设计三维模型如图1所示。
2.2.1 六轮全驱动行走机构
六个行走轮脚可以绕着机架上的轴做一定角度的旋转并设有旋转限位块,且每组左右两个脚轮通过双钩拉簧进行拉紧,使轮脚上的轮子在弹簧的拉力下紧压炮管内壁,从而使移动机构在可适应炮管口径范围内保持恒定的拖动力。
2.2.2 自适应导向清洁
(1)自适应旋转钢刷头:通过径向弹簧预紧使擦洗钢刷对炮管内壁能够保持一定的压力并做相对运动实现钢刷对固留杂质的刮松。
(2)自适应往复擦洗头:擦洗块转盘圆周面上匀布12个擦洗块,擦洗块可以沿着擦洗块转盘的径向滑动,内部由弹簧预紧。
(3)自适应万向轮导向机构:万向轮对清洁机器人的运动起导向作用,其设计结构能很好的捕捉炮管内部的螺线凹槽,给机器人的旋转运动提供数据依据。
2.3 控制部分设计
为了使各功能部件互相配合,形成有机的整体,本文设计了主控制器、供电系统、动力系统、通讯系统、传感器、洁度检测系统。各系统在主控制器的控制下协调工作,按照指令完成既定任务。
2.3.1 主控制器
主控制器搭载μC/OS-II可抢占式实时多任务嵌入式操作系统内核,便于主控制器协调多个系统工作。
2.3.2 动力系统
动力系统选用三台额定电压12V的直流无刷电机构成。通过霍尔传感器实现对电机转子位置的检测,反馈给主控制器以实现电机的平稳运转以及对速度的精确控制。
2.3.3 通讯系统
控制站与机器人之间采用ZIGBEE协议通讯,通过增加基站的方式灵活地增大通讯距离。在需要超大距离通讯的场合可通过加装GSM模块实现。
2.3.4 传感器
(1)碰撞传感器:机器人前端装有碰撞传感器,以及细弹簧钢丝,当弹簧钢丝触碰到炮管底部时发出信号给主控制器,此时主控制器下达命令开始清洁工作,确保从炮管底端开始清洁。
(2)温湿度传感器:机器人装有温湿度传感器,通过对温湿度的精确检测判断炮管是否处于易腐蚀生锈的状态,并将状态反馈给控制站,避免不必要的氧化。
(3)摄像头:机器人外侧装有OV7670摄像头,机器人处于非工作状态时,可有选择地以每秒一次的频率对现场拍照并将图片内容发送至控制台,以便控制台对现场的有效监控。
(4)洁度检测模块:洁度检测模块由ADNS-3080与红外二极管以及红外线穿透pmma制成的透镜组成。主控制器通过对图像进行处理寻找黑色像素点实现对炮管洁度的检测。
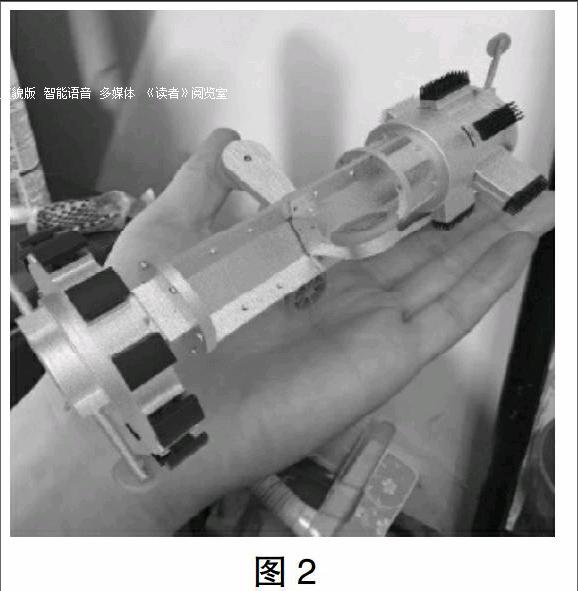
3 实际分析(图2)
(1)适应炮管口径范围D为φ120mm-φ200mm;(2)满足管径±3%的微观变径;(3)拖动力F≥500N;(4)行走速度3m/min;(5)总体长度约为600mm;(6)总重量小于15Kg;(7)擦抹剂流量2.5ml/s。
4 结语
纵观国内外管道机器人的研究状况,目前关于管内移动机构的研究较多,而行走方式也各异,各类行走方式适用于不同的管道。线膛炮内表面有螺旋槽,且炮管口径种类多,设计出与之相适应的行走机构是本作品的实用性所在。
在清洗方式上,目前国内已经投入使用的管道机器人主要用于空调管道等较易清洗的管道,因灰尘较易除去,此类管道对清洗部分没有太高的要求。而复杂内表面清洗常采用的方式包括干冰清洗法、气体爆破法、高压水流清洗法等,对辅助设备要求较高,但不便于携带,不能满足武器清洗的要求。本作品采用的复合式仿人工清洗方式:高速旋转清洗,通过钢刷高速旋转将积炭刮松,实现对积炭的“粗洗”;低速往复式擦洗,通过包裹浸有清洗剂的擦洗布,轴向往复擦洗炮管内壁,实现对积炭的“精洗”。该清洗方式与目前采用的清洁方式相比高效便捷,能很好地完成清洁任务。该清洗机器人的研究有很大的理论价值和广阔的应用前景。
参考文献
[1]曲彩云,等.机械设计手册[M].第3版.北京:机械工业出版社,2007.
[2]唐增宝,常建娥.机械设计课程设计[M].第3版.武汉:华中科技大学,2006.
[3]彭文生,等.机械设计[M].第2版.武汉:华中科技大学,2000.
[4]熊良山,等.机械制造技术基础[M].第1版.武汉:华中科技大学,2007.
[5]戴荣,杜中华.火炮身管除炭设备动力学仿真分析[J].计算机仿真,2014(02).
[6]王勇,王玉保,闻德升.一种管道外壁行走装置的结构设计[J].新型工业化,2014,第7期.
[7]陶卫军,廖凯,冯虎田,钱林方.便携式炮管擦洗机器人设计[J].南京理工大学学报:自然科学版,2011第4期.
[8]梁天添.基于51单片机的管道缺陷漏磁检测系统的设计[D].2012.
猜你喜欢
快乐语文(2021年15期)2021-06-15
童话世界(2020年13期)2020-06-15
城市轨道交通(2019年2期)2019-04-04
城市轨道交通(2019年2期)2019-04-04
中国教育信息化·基础教育(2016年11期)2016-12-27
汽车科技(2016年5期)2016-11-14
中国新通信(2016年16期)2016-10-18
河南科技(2014年1期)2014-02-27
