
一种温室环境采集与控制算法的研究
2017-07-24 15:45叶珊珊李建兵聂山权姜海洋
电子设计工程 2017年10期
叶珊珊,李建兵,聂山权,姜海洋
(1.解放军信息工程大学 河南 郑州 450000;2.兵峰电子科技有限公司 河南 郑州450000)
一种温室环境采集与控制算法的研究
叶珊珊1,李建兵1,聂山权2,姜海洋1
(1.解放军信息工程大学 河南 郑州 450000;2.兵峰电子科技有限公司 河南 郑州450000)
针对现代温室监控管理系统信息处理体系缺失、采集信息精度不足的问题,提出了一种协同处理多维数据的支持度测量算法,并与相融矩阵法、自适应加权平均法结合,构建了一种三层信息处理模型(TDPM)。在郑州贝利得的温室中通过VC++对该模型进行了性能测试,实地实验表明,相较于传统的农业采集与控制系统,搭载该模型的系统可有效实现温室环境的实时测量与自动控制,达到采集信息精确化,设备控制自动化的目标。
温室;智能监控;相融矩阵;自适应加权平均;支持度测量法
物联网是传感器、互联网和信息处理技术高度融合的新一代信息技术[1],它的蓬勃发展带动了各行业对环境信息监测控制系统在数据采集精度、控制自动化方面的需求[2-7]。环境采集器能否获取准确的环境信息,关系着系统总体采集与控制的精确度高低。合理运用采集到的环境信息为系统自动控制提供决策依据,则是系统控制智能化的关键。
随着农业物联网概念的提出与推广,许多学者加入了对温室环境监测控制系统的研究行列[1,8-12]。文献[8]通过将DS证据理论和农业专家系统相结合,提高了温室环境监测的精确度。但该方法存在无法处理证据冲突、未讨论控制设备开关程度、过度依赖专家系统的问题。文献[9]针对上述问题对DS规则的组合方式进行了修改,较好的克服了证据理论不能处理焦元不一致的问题,但是对于系统设备控制程度问题、专家系统过度依赖性问题仍然没有给予较好的解决方案。基于此,文献[1]将基于Zernike矩的图像识别技术应用于温室监测控制系统中,实现了天窗开度的自动控制,较好地解决了设备控制模糊性问题;同时,文献[10]研制了一套基于模糊神经网络的上位机管理决策软件和实现下位机数据处理、集成控制的监控软件,一定程度上降低了系统对专家信息的依赖,但随之带来了系统控制的实时性和准确性不足的问题;此外,带Smith预估器的模糊PID温度控制算法[11]、基于支持向量机的设备状态组合分类模型[12]等方法也被用于温室环境监测控制系统中,试图提高其采集信息的精确度和对设备控制的自动化水平。但是在上述系统中,不论是DS证据理论,还是模糊神经网络,都涉及大量的运算,且多停留于理论研究阶段,存在实时性不足,实用性不强且难以工程化应用的问题。因此,在环境信息监测控制系统中,寻找一种通用有效、系统规范、适于工程实现的信息处理方法是有必要的。
根据上述实际需求,提出了一种处理多维异质数据的简便算法——支持度测量法(SDMA),然后在此基础上建立了一种三层信息处理模型(TDPM)。该模型由处理层、融合层、关联层组成,具有实用性强、精确度高、可移植性强等优点。TDPM模型首先在处理层运用相融矩阵法对采集数据进行预处理,剔除失效数据;然后,由融合层中的自适应加权平均法对余下的有效数据进行精度优化;最后,位于关联层的支持度测量法对多维数据进行关联处理,综合利用异质传感器数据辅助决策,最终实现设备的自动控制。
1 TDPM模型
农业环境监测控制系统的服务器软件主要由WEB服务软件、数据库和采集与控制服务软件组成。WEB服务软件用于给WEB客户端和手机APP提供数据服务;数据库用于存放采集的温室信息、控制指令等用户信息;而采集与控制服务软件则用于采集现场的环境数据和设备状态。TDPM模型的实现位于采集与控制服务软件中,旨在为系统提供更精确的数据支持和更智能的设备控制功能。
TDPM模型由处理层、融合层、关联层3部分组成,其结构如图1所示。首先,将网关采集到的现场实时数据送入信息处理层,处理层采用相融矩阵法[9]对失效的数据进行剔除;然后,融合层使用自适应加权平均法[13]对其进行局部信息融合,为系统对设备进行后续自动控制提供更准确的决策依据;最后,提出支持度测量法,并将其运用在关联层。它对经过前两层处理后的数据进行关联再处理,结合数据库中的历史数据以及它们对应的控制策略,实现对设备的自动控制。下面对TDPM模型的各层分别进行详述。
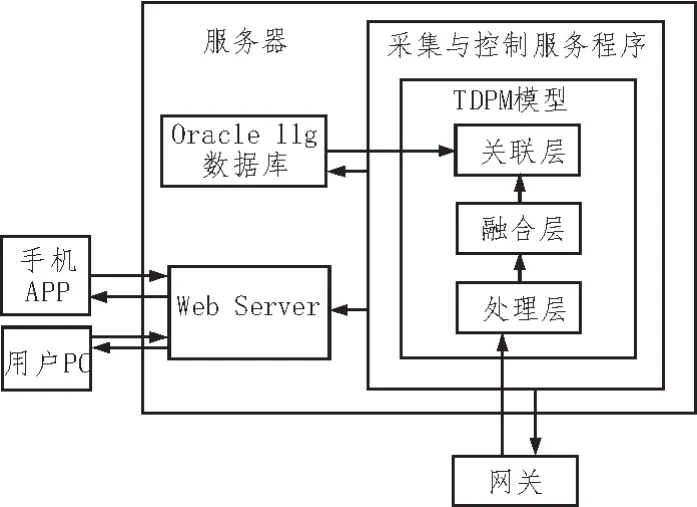
图1 TDPM模型结构图
1.1 处理层
处理层是TDPM模型的第一层,主要对采集到的数据进行预处理。在信息采集的过程中,由于严重的噪声干扰、传感器失灵等客观因素,会出现一些大幅偏离真值的数据,这些数据的存在不仅导致信息采集系统产生较大的误差,且影响后续的控制精度,因此对失效数据进行剔除是十分必要的[8]。TDPM模型处理层的功能就是剔除这些由网关传送的数据中失效的部分。
假设在某空间内存在m个同质传感器,对同一环境参数进行测量。在某一时刻t时,这m个传感器测量到的数据分别为T1,T2,…,Tm。第i个传感器的测量方差为。定义第i,j个传感器的测量方差之差为相融距离测度,用dij表示,其计算表达式如下:

由式(1)可以看出,dij的值越大,说明两传感器方差的差值越大,也就是其测量数据的差距越大。我们使用式(1)计算所有传感器两两之间的相融距离测度dij,将其组成的矩阵定义为数据融合度矩阵,用Dm表示,其表达式如式(2)所示:

根据专家经验或多次测试的结果,取相融距离测度阈值dth。将dth与融合度矩阵Dm中的相融距离测度dij进行比较,得到融合判决值rij,rij的表达式如下所示:

当融合判决值rij为0时,说明i,j两传感器方差之差大于相融距离测度阈值dij,此时它们的相互支持程度较弱,视为相互对立;反之,当rij的值为1时,则认为两传感器相互支持。接着,由融合判决值rij组成矩阵Rm,且定义它为多传感器相融矩阵,其表达式如下:
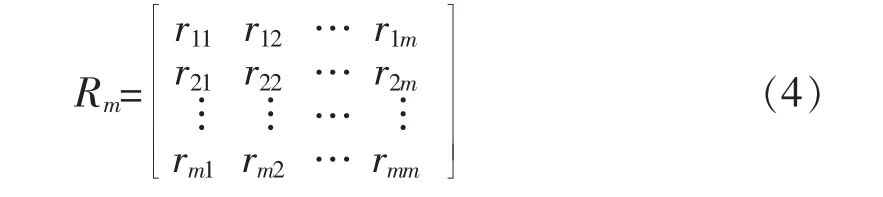
当相融矩阵Rm的某一行元素中,0占多数时,说明这一行所代表的传感器只被总数中的少数传感器支持,可以认为该传感器的测量数据不可靠,应将其剔除,以消除对系统后续控制决策的影响。反之,当1占多数时,则认为该传感器被其它多数传感器支持,测量的数据视为有效数据。此外,当检测到某个传感器的数据长期失效时,应考虑检查该传感器是否发生故障,需要进行维修更换。
1.2 融合层
融合层是TDPM模型的中间层,该层采用自适应加权平均法,对有效数据进行精度优化。现代温室空间较大,多个同质传感器测量的数据可能由于环境参数分布不均匀而具有一定的差异,对其进行局部融合可使同质数据精度更高[14]。而且,在温室环境监测控制系统中,某些环境因子在某段时间内的变化很小,可以忽略不计,此时对其进行时间上的数据融合可以有效减少系统的运算次数。另外,若将融合层置于无线传感网的汇聚节点,可以减少网络中的数据传输量、降低能耗、提高信道利用率等等[15]。
自适应加权平均法是信息融合中一种常见的数据级融合方法,它不要求知道传感器测量数据的先验知识,仅通过测量数据即可得到均方误差最小的融合值[13]。其算法流程如下:

且其权值和为1,表达式如下所示:

由以上条件可推出总均方误差σ2为[13]:

要得到当总均方误差σ2最小时的各权值Wi,由多元函数求极值理论[14]:
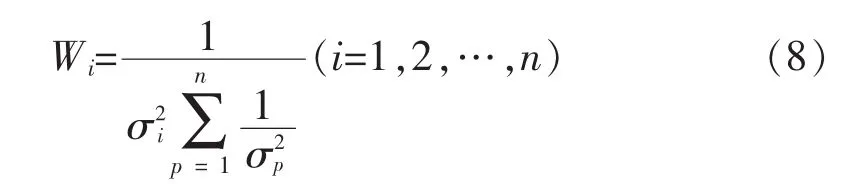
此时对应的最小均方误差σ2min为:

由式(8)知,求得每个传感器的方差,即可得到其对应的权值,进而得到最优融合值。另外,此时系统的最小总均方误差可由式(9)求得,为算法精度对比所用。
1.3 关联层
本小节将对关联层的支持度测量法进行阐述。支持度测量法的作用是对经过前两层处理的各异质传感器数据进行协同处理,结合数据库中的历史数据及其控制策略,得到最终控制决策,实现设备的自动控制。其算法流程如下:
假设有3种异质环境数据A,B,C,它们均经过了前两步的数据处理。在进行全局信息关联处理时,需要使用数据库中的n组历史采集数据以及相对应的控制方案记录,设其为集合S={S1,S2,…,SN},其中,Sn(n=0,1,…,N)为3种不同环境参数的组合,即S1=(A1,B1,C1),S2=(A2,B2,C2),…,SN=(AN,BN,CN)。假设此时系统的实时测量值为 (A,B,C),并且定义h为实时测量值与历史数据中某一组元素的距离测度,则每组历史数据均对应一个距离测度hi,其计算公式如下:

其中,σk(k=1,2,3)是不同环境参数的加权因子,其作用是将不同环境参数的数据进行标准化处理。定义mi为各个历史控制策略对当前环境状况的支持度,其计算公式如下:

观察式(11)可知,支持度mi由距离测度hi的倒数计算得来,并且当距离测度hi越小时,mi值越大,即对应的第i个历史方案对当前环境状况的支持度越大。此时选择第i个历史方案中的控制策略,对设备进行控制则越能够达到理想的控制状态。因此,根据均方误差最小准则,选取maxmi对应的方案作为最佳控制策略。
以上即为支持度测量法的算法流程,可以看出这种方法直观简单,易于理解,且便于工程实现。
2 实验验证
本节将上述TDPM模型应用在温室环境监测控制系统中,对其可行性进行实验验证。采集与控制服务软件采用的开发环境是VS2008,在满足功能要求的前提下,选择了Oracle 11g数据库管理系统。
实测环境位于郑州贝利得32m×72m的温室中,如图2(a)所示。系统服务器采集与控制服务软件界面如图2(b)。

图2 实测场景与软件界面
温室中部分设备参数如表1所示。
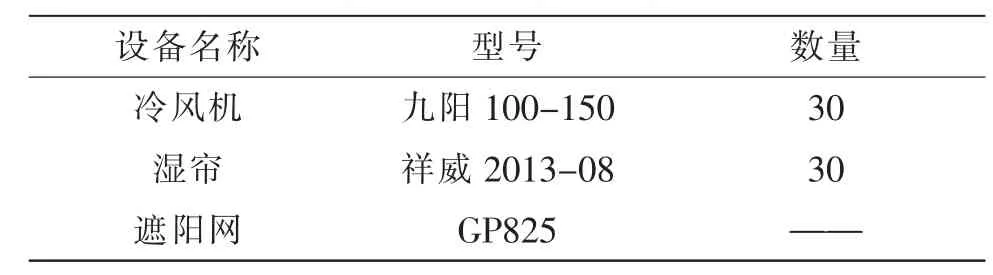
表1 实测环境设备表
在棚内某区域放置十个温度传感器,已知ID= 10的传感器发生故障失效。它们在同一时刻采集的温度数据分别为:24.41,25.76,25.03,25.69,24.74,24.46,24.46,24.21,24.12,24.28,33.00。由处理层的相融矩阵法对其进行处理,运行结果如图3所示。

图3 相融矩阵法运行结果
图3中,第一个矩形标注的是系统实时采集的十组数据,第二个矩形标注的为处理层算法中的相融矩阵。观察相融矩阵的最后一行,共有9个0,唯一的1为该故障传感器与自己比较所得;其余每行的0的个数均不超过传感器总数的一半。用第三个矩形标注的则是经过处理层处理后的结果,容易看出该算法成功的找出了失效数据33.00。此处为显示算法有效性,故在输出框进行了显示,在工程中只需对其进行标记并将其删除即可。
经过处理层处理后的温度值采用自适应加权平均法对其进行局部融合,融合结果如表2所示。其中,S1到S10表示 10个温度传感器,S10为经过检测失效的传感器,S赞为温度融合值,为最小总均方误差,为第i个传感器的方差,wi为经过算法计算得到时第i个传感器的最优权值。由表2可以看出,十组传感器分配的权值各不相同,但其和为1;且当其测量方差较大时,算法为其分配的权值较小,以此来提高融合值的精度。经计算,最终的温度融合值为25.19,最小总均方误差为0.005 2。

表2 温度数据融合结果
为了显示自适应加权平均法的优势,将其与直接平均法进行对比。同种情况下直接平均法得到的均值与方差分别如式(12)(13)所示。其中,S为9个温度测量数据的均值,为此时的测量方差。


对比上述结果可知,同样情况下自适应加权平均法的总方差值远小于直接平均法的方差,即前者的性能优于后者。
同理,对大棚内空气湿度和光照强度也进行处理层和融合层的处理,得到其融合结果如表3所示。

表3 湿度、光照融合结果
将多维信息融合结果送入关联层,使用支持度测量法对其进行协同处理,其中用到的数据库历史数据如图4所示。该图中表格的第一列为数据编号,之后三列是采集信息类别,它们分别为温度、空气湿度和光照强度。最后五列为设备名称,分别是升温设备、风机、遮阳网、湿帘以及补光灯。其中,设备列中的数字0代表在该种环境状况下,对应的设备处于关闭状态,数字1则代表该设备此时处于打开状态。
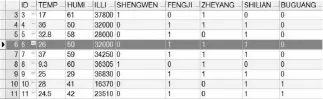
图4 部分历史数据表
使用支持度测量法对多维数据进行处理,处理结果为ID=6,即此时的最优控制策略是打开风机、打开湿帘、打开遮阳网。
在实测温度、空气湿度、光照强度分别为(25.19,50.36,32000)时,目标环境参数设置为(20,65,25000),采用上述模型通过风机、湿帘、遮阳网进行调控后,得到实时控制误差结果如图5所示。
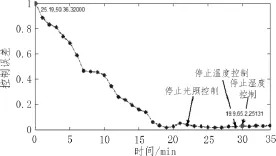
图5 控制误差结果
通过图5可以得知,采用TDPM模型可有效的对温室环境进行自动调控,且在第30分钟完成了整个控制过程,达到了目标环境参数值。其中,在第22分钟首先完成了光照的调控,而温度和湿度则分别在29分钟和30分钟时达到了理想值。温室环境参数由起初的(25.19,50.36,32 000)变为(19.9,65.2,25 131),基本达到最适环境。
3 结 论
文中根据现代温室环境监测控制系统的需求,提出了支持度测量法,并且在此基础上建立了TDPM模型。该模型通过对采集信息的一系列处理,提高采集数据的精度,进一步实现设备的自动控制。它通用性强,不仅可以用于温室监测控制系统,还可以推广用于工业、家居等信息采集控制系统。同时它易于理解,实现简单,适合实际应用。但是,支持度测量法的精度对于历史数据库的大小存在一定的依赖性,笔者在未来的工作中会继续对其进行研究。
[1]秦琳琳,陆林箭,石春,等.基于物联网的温室智能监控系统设计[J].农业机械学报,2015,46(3):261-267.
[2]刘倩,张向飞,丁永生,等.面向农业物联网多环境信息融合的监测判别[J].浙江农业科学,2013(12): 1694-1696.
[3]韩志平.温室环境参数模糊控制[D].沈阳:沈阳工业大学,2012.
[4]卢兴森,陈苏婷,施佳驰.基于北斗和ZigBee的农田数据采集与传输[J].电子技术应用,2015,41(6):35-37.
[5]张伟.面向精细农业的无线传感器网络关键技术研究[D].杭州:浙江大学,2013.
[6]王冬.基于物联网的智能农业监测系统的设计与实现[D].大连:大连理工大学,2013.
[7]初洪龙.基于物联网的智能农业大棚的研究与实现[D].大连:大连理工大学,2014.
[8]武晓嘉,杨盘洪.多传感器数据融合在温室智能控制中的应用研究[J].消费导刊,2008(10):174-175.
[9]黄小红.传感器网络数据融合技术研究及在温室控制中的应用[D].成都:电子科技大学,2009.
[10]秘立鹏.基于模糊神经网络的设施农业温室大棚自适应控制系统的开发[D].太原:太原理工大学,2014.
[11]岳青.基于WSN的温室环境智能监控系统研究[D].杨凌:西北农林科技大学,2011.
[12]王东.基于多传感器融合的温室环境智能控制系统研究与实现[D].杨凌:西北农林科技大学,2012.
[13]李战明,陈若珠,张保梅.同类多传感器自适应加权估计的数据级融合算法研究[J].兰州理工大学学报,2006,32(4):78-82.
[14]张阳,沈明霞,孙玉文,等.基于多传感器自适应加权融合的温室信息系统[J].传感器与微系统,2014,33(6):100-103.
[15]傅海波.无线传感网中数据融合算法的研究[D].南京:南京邮电大学,2013.
Research on a novel data collection and device controlling algorithm for greenhouse
YE Shan-shan1,LI Jian-bing1,NIE Shan-quan2,JIANG Hai-yang1
(1.The PLA Information Engineering University,Zhengzhou 450000,China;2.Bing feng Electronic Technology Corporation,Zhengzhou 450000,China)
To solve the problem of lacking information processing architecture and the precision deficiency of the collected data for modern greenhouse monitoring and management systems,we propose support degree measurement algorithm(SDMA),which can joint disposal several data.Then we construct a three-layer information processing model (TDPM) with the combined utilization of SDMA,compatibility matrix algorithm and adaptive weighted estimate algorithm.Finally, we testthe performance of TDPM by VC++in the greenhouse of Bailey,Zhengzhou.The field experiments showed that,compared with traditional agricultural data collecting and device controlling system,our system with TDPM could realize the real-time measurement and controlling effectively,as well as achieve the aim of gathering more accuracy data and controlling devices automatically.
greenhouse;intelligent monitoring;compatibility matrix;adaptive weighted estimate;SDMA
TN915.41
A
1674-6236(2017)10-0001-05
2016-07-26稿件编号:201607183
国家科技支撑计划课题支持(2014BAH30B01)
叶珊珊(1991—),女,河南洛阳人,硕士研究生。研究方向:物联网技术。
猜你喜欢
装备环境工程(2022年9期)2022-10-13
数学物理学报(2021年5期)2021-11-19
北方音乐(2020年10期)2020-07-09
金桥(2018年2期)2018-12-06
浙江工业大学学报(2017年5期)2018-01-22
小天使·一年级语数英综合(2017年9期)2017-10-20
物理教师(2017年5期)2017-06-09
福建人(2016年11期)2016-12-07
北京航空航天大学学报(2016年5期)2016-11-16
测绘科学与工程(2016年4期)2016-04-17
