
智能电能表离散型自动化检定的协同应用
2017-07-24 16:04:01苏慧玲王忠东蔡奇新
自动化仪表 2017年7期
苏慧玲,王忠东,蔡奇新
(1.国网江苏省电力公司电力科学研究院,江苏 南京 211100; 2.国家电网公司电能计量重点实验室,江苏 南京 211100)
智能电能表离散型自动化检定的协同应用
苏慧玲1,2,王忠东1,2,蔡奇新1,2
(1.国网江苏省电力公司电力科学研究院,江苏 南京 211100; 2.国家电网公司电能计量重点实验室,江苏 南京 211100)
为实现智能电能表离散型自动化检定系统的优化运行,提出了一种多系统协同运行方案。首先,在设备物理层面,基于智能电能表的离散型自动化检定特点,根据设备类别将离散型自动化检定系统划分为各子系统,构建离散型自动化检定的设备调度控制模式。其次,结合各子系统的特点以及在设备调度控制模式中的功能,基于优先级设计自动化检定调度系统的自动叫表流程,提出自动导引车(AGV)调度子系统搬运策略,建立机器人(RGV)控制子系统的挂卸表规则。接着采用前馈反馈验证机制,构建了封印贴标控制子系统的调度控制模式。然后,基于系统协同效应理论,采用帕累托多目标优化方法,建立离散型自动化检定系统协同优化调度的概念模型。最后,构建了智能电能表离散型自动化检定协同运行平台方案。实际工程应用验证了该方案的高效性和可行性。
智能电网; 协同; 离散型; 调度控制; 自动化检定; 智能电能表
0 引言
智能电网作为新型的智能化服务网络,其智能化核心是通过创建开放的信息系统和共享的信息模式,灵活、全面、动态地整合用户侧资源,尤其强调与用户信息和电能的双向互动[1-3]。高级计量体系是支撑智能电网建设的关键技术之一[4]。在智能电网不断纵深发展的大背景下,智能电能表是支撑智能电网高级计量体系的关键设备,是实现电网与终端用户之间双向交互的重要终端设备[5-7],具有举足轻重的作用。
《2014—2018年中国智能电表行业市场研究报告》指出,中国智能电网的建设速度加快,直接推动了智能电表需求的快速增长[8]。2013年底,中国各行业累计安装了3.7亿只智能电表[9]。目前,我国省级计量中心承担着智能电能表的检定和配送工作[10]。面对大规模的需求量,在保障生产作业安全可靠的前提下,实现智能电能表自动化检定的高效运行迫在眉睫。
德国在《高技术战略2020》中提出“工业4.0”,并将其上升为国家战略[11]。在国内,早在2009年就提出了工业化与信息化“两化融合”的战略,并于2015年1月提出了以智能制造为主攻方向,深度融合两化战略目标[12-16]。我国的两化战略与德国工业4.0具有异曲同工之处,其目的均为采用数字化、智能化的设备改造企业生产模式,提升企业生产效率,增强产业核心竞争力。
我国电力计量检定工作已基本实现自动化检定,但是建立高效运行的数字化检定生产车间,进一步提高检定效率,仍然是需要深入探索的问题之一。智能电能表离散型自动化检定系统涉及众多子系统环节。该系统基于协同效应理论,由离散型自动化检定的基本流程以及系统构成。本文研究了智能电能表离散型自动化检定的多系统协同调度控制策略以及模式,构建了离散型自动化检定的多系统协同优化调度框架。
1 系统构成
电能表离散型自动化检定系统是综合运用机器人(rail guided vehicle,RGV)、计算机控制、传感器检测、气动和电动控制、图像识别及计算机网络通信等领域的技术,实现电能表传输、耐压试验、外观检查、上表、误差检定、下表、封印、检定合格证粘贴、不合格表分拣等各个环节的自动作业。
1.1 离散型自动化检定流程
智能电能表通过自动导引车(automatic guided vehicle,AGV)从库房接驳处输送到检定单元,每个检定单元由RGV机器人与检定装置组成;RGV机器人从周转箱取出电能表,并连接到检定装置,且在挂表同时完成身份识别。检定装置完成耐压测试、功能及误差检测,然后由RGV机器人把电能表下到周转箱,再由AGV小车输送到自动化封印贴标流水线单元,流水线单元完成外观检查、分拣、封印、贴标等工作,最后由输送线输送到库房接驳处。
在电能表离散型自动化检定的实现方式上,电能表以垛为单位进行传输,AGV小车用于电能表箱垛的输送;RGV机器人将电能表从转接台放至检定装置上,1台RGV可以控制多台检定装置,其中转接台用于暂时存放未检/已检的电能表箱垛;检定装置用于检定电能表,判断其是否合格。
1.2 自动化调度检定系统构成
整个智能电能表离散型自动化检定调度系统主要由检定装置控制子系统、AGV调度子系统、RGV控制子系统以及封印贴标控制子系统构成。
AGV调度系统控制管理AGV小车的输送目的地以及输送路径,创建并下发AGV搬运任务,实现电能表垛从出库站台到转接台、从转接台到入库站台的搬运,提供AGV任务优先级调整、变更目的地、撤消等操作,同时实现AGV小车运行状态的实时监视功能。RGV控制系统有机协调机器人与检定台、转接台之间的信息交互,创建并下发机器人挂表、卸表任务,通过控制机器人手臂实现电能表的挂卸功能。表计检定系统控制检定台的检定任务启动、停止、暂停等,根据表计检定规程的相应要求,对表计各待检项进行逐一检定判断。
1.3 离散型自动化检定控制方案
电能表离散型自动化检定调度系统是整个全自动化检定系统的核心调度系统,将电能表检定台体、RGV机器人、AGV小车、封印贴标线及其子系统整合为统一的自动化检定系统,可实现对自动化设备的总体调度,执行来自生产调度平台的检定任务。智能电能表离散型自动化检定调度控制方案如图1所示。
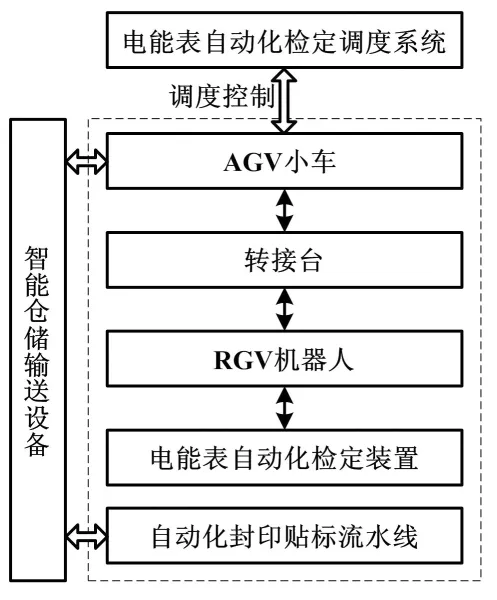
图1 自动化检定调度控制方案示意图
2 离散型自动化检定协同调度模式
搭建多系统协同优化调度平台,从最上层掌控生产全局,通过业务流程、任务控制等手段,指挥各个自动化控制系统协同开展自动生产工作。各自动化控制系统则根据生产流程,接收来自调度平台的任务,直接控制相应的自动化设备动作,执行生产任务。此外,由于优化调度平台需要纳入众多设备及其管理子系统,为方便设备的控制管理以及不同子系统之间数据交换流转的查询,同时协助异常故障的及时定位处理,构建中间层,向上对接调度平台,向下衔接各子系统。
2.1 检定装置控制子系统
检定装置执行自动检定模式,在执行检定任务过程中,无需人为干预。当检定调度系统接收到RGV机器人挂表完成任务后,自动向检定控制台下发启动检定指令。其中,检定装置结合检定进度,对待检表执行自动叫表策略。每次叫表根据接线方式和检定任务优先级(可配置)进行检定区可用台体判定,即存在可用台体才进行叫表。
设检定区叫表检定任务数为m,叫表间隔为t,叫表任务数量的阀值为r,台体检定进度为p。根据接线方式将检定任务分成单相、三相直接接入、三相互感器接入三类,并按一定比例k根据间隔时间t执行叫表。
以单相检定装置为例,装置叫表优先级如下。
①状态为空闲、卸表中、检定完成,且待检转检台没有待检垛的台体。
②检定进度大于设定值p,且待检转检台没有待检垛的台体。
③待检转检台没有待检垛的台体。
检定装置待检表自动叫表流程如图2所示。
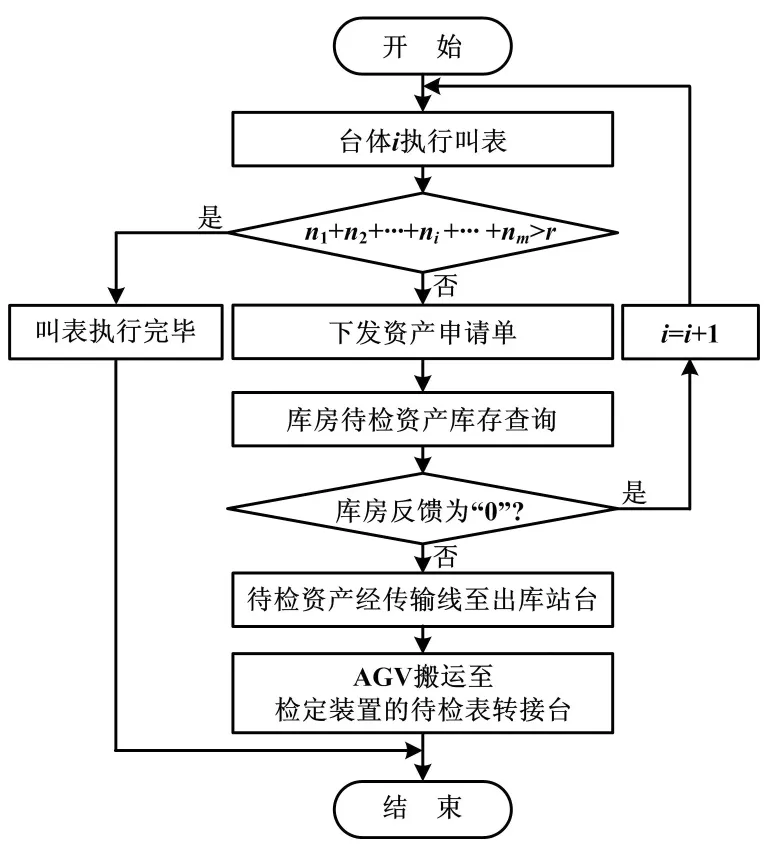
图2 自动叫表流程图
2.2 AGV调度子系统
从出入库搬运角度,采用分区、分单元动态分配和任务状态实时上报模式来实现AGV调度控制,分为待检表出库搬运和已检表入库搬运。
①待检表出库搬运。
当已申请的资产到达出库站台后,检定调度系统根据资产设备类型,查询检定区当前可以满足运送条件的台体。其中,查询条件参照叫表可用台体,分区、分单元进行动态分配AGV搬运任务。
AGV搬运任务下发成功后,检定调度系统锁定目的转接台、监测AGV小车搬运作业,AGV控制台上报任务执行状态,如取货完成、送货完成、任务完成等状态。
②已检表入库搬运。
已检表入库搬运以优先处理批次尾表为原则,检定调度系统判断已检转接台是否存在有效垛,并根据台体检定进度来确定是否下发入库搬运任务。
2.3 RGV控制子系统
RGV机器人在检定台体正常工作的前提下执行自动挂卸表。
(1)挂表。
在RGV机器人、转接台、检定台体满足以下条件时,检定调度系统向RGV机器人控制台下发挂表任务。
①机器人加入调度、状态空闲,无异常调度挂卸表任务;
②单元内存在状态为空闲的台体且接受调度;
③空闲台体所对应的待检转接台存在有效待检垛,空箱转接台无垛;
④待检转接台、空箱转接台均未被锁定。
此外,若台体卸表完成后又满足挂表条件,调度优先进行当前台体挂表作业。
(2)卸表。
在RGV机器人、转接台、检定台满足以下条件时,检定调度系统向RGV机器人控制台下发挂表任务。
①机器人加入调度、状态空闲,无异常调度挂卸表任务;
②单元内存在检定完成状态的台体且接受调度;
③空闲台体所对应的空箱转接台存在有效空箱垛,已检转接台无垛;
④空箱转接台、已检转接台均未被锁定。
2.4 封印贴标控制子系统
封印贴标线根据实际生产过程的状态自动选择执行直接封印或待封印回库。如果已检垛所对应的封印贴标任务为优先封印,并且检定调度系统判断封印贴标线为空闲状态,此时封印贴标线满足直接封印,检定调度系统下发直接封印申请。在不满足直接封印条件或所属封印贴标任务的优先级设置为低时,检定调度将执行待封印回库。
为避免信息错乱,采用前馈反馈验证机制,封印贴标控制子系统的调度控制方案如图3所示。图3中:实线箭头表示任务流,虚线箭头表示信息反馈,点划线箭头表示信息前馈。保障资产任务信息与实际封印贴标的资产信息相一致。
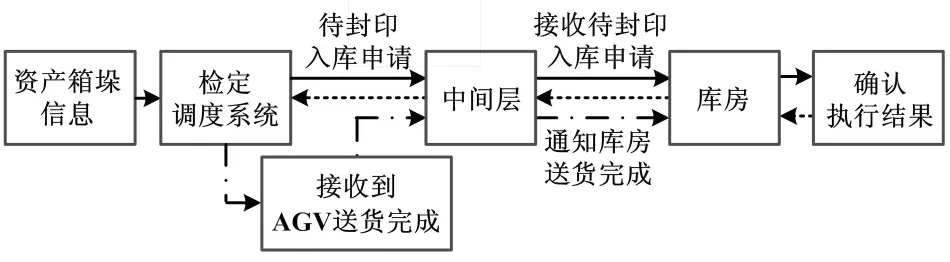
图3 调度控制方案示意图
3 离散型自动化检定的多子系统协同调度
所谓系统协同调度,就是依据各系统的特点,在运行过程中规避各系统的不足,以最大程度实现系统整体运行效率最优。本文基于系统控制方案,结合帕累托多目标优化方法,采用协同调度机制,建立多子系统协同优化调度策略。
3.1 协同优化调度
为适应智能电能表离散型自动化检定模式,达到多子系统运营的有机协调,结合各子系统的特点,基于帕累托多目标优化思想[14-16],提出了一种设备局部以及系统整体最优的协同调度模式。首先,考虑设备运营局部效率最优,建立设备子系统的调度运行策略;其次,根据生产任务的实际要求以及进度情况,以高效完成系统总体生产计划任务为整体优化总目标,通过调节各设备子系统运营的局部优化子目标,在保证局部正常可靠运营的前提下达到系统整体优化总目标。
3.2 协同优化调度的基础模型
由图1、图2可知,AGV小车、RGV机器人以及自动化检定装置统一由自动化检定调度系统集中管控,通过AGV小车与智能仓储进行交互,而自动化封印贴标线则是直接与智能仓储进行交互。从局部而言,AGV小车、RGV机器人以及自动化检定装置的运行效率直接影响AGV小车与智能仓储之间的交互效率,与自动化封印贴标线的运行效率没有关联;从系统整体而言,自动化检定线智能表计的检定效率以及封印贴标线的运行效率是决定系统总体生产效率的关键因素,其中的主要约束条件是智能仓储输送设备运行效率。
基于上述分析,协同优化调度问题可表示为式(1)~式(3)。
maxF1=max{f1(x1)f2(x2)f3(x3)}
(1)
式中:F1为考虑检定装置、RGV机器人以及AGV小车运行效率下自动化检定线智能表计的检定效率,即协同优化调度的局部子目标;f1为检定装置系统的运行效率;f2为RGV机器人的运行效率;f3为AGV小车的运行效率。
maxF2=max{f4(x4)}
(2)
式中:F2为协同优化调度的局部子目标;f4为封印贴标线的运行效率。
(3)
式中:F为兼顾智能表计检定及其封印贴标运行效率下,自动化检定系统整体的运行效率;X=[x1,x2,x3]为约束限制变量,包含影响f1的可调变量以及智能仓储输送设备的可调变量;G(X)、H(X)分别为可调变量X下影响F的约束限制条件,如AGV小车运力的约束、检定台体检定能力的约束以及接驳区出入库量的平衡等相关约束。
4 多子系统协同优化调度平台
将前文所述各子系统功能按照逻辑结构有机集成。考虑与其他系统之间的无缝对接,搭建多子系统自动化检定协同调度平台,其功能结构如图4所示。
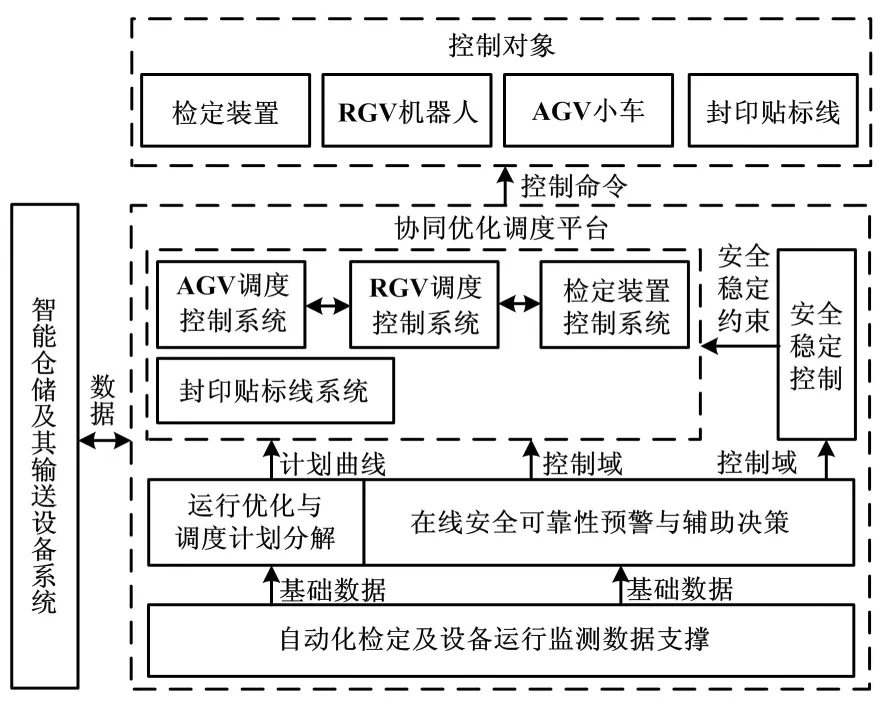
图4 平台整体功能结构图
自动化检定及设备运行监测数据支撑模块将AGV小车、RGV机器人、检定装置等底层设备的实时运行状态通过PLC、OPC、传感器等,上报到协同优化调度平台、智能仓储及其传送设备系统。协同优化调度平台接收上级调度指令以及生产计划任务,基于数据支撑模块提供的资源信息及设备运行状态,进行任务、设备运行优化与调度计划的协调分解,将生产任务计划下发至各系统模块;在线安全可靠性预警与辅助决策模块周期性地更新设备运行极限/裕度、预防控制模块的协调控制域;结合功能模块,经协调优化形成控制命令,下发给各控制对象,实现对整个自动化检定系统的闭环自动控制。
5 结束语
随着智能电网的不断发展和改善需求,智能电能表的离散型自动化检定应运而生。智能电能表离散型自动化检定系统是由多设备子系统构成的复杂系统,各设备子系统之间的协同运作是保障离散型自动化检定整体系统高效、安全、可靠以及稳定运行的关键所在。本文提出了一种智能电能表离散型自动化检定系统协同运行的模式。根据智能电能表离散型自动化检定流程,将整个自动化检定系统依据设备类别进行子系统划分,基于协同效应理论,构建子系统协同优化调度的基础模型以及协同调度控制策略,并据此提出了检定装置、AGV、RGV以及封印贴标线各子系统的优化调度模式,搭建了自动化检定协同调度平台。
在后续研究工作中,将采用大数据等分析处理方法,探讨智能电能表自动化检定系统安全、可靠运行的风险评估以及潜在故障防御机制,以保障自动化检定的高效运行。
[1] 王蓓蓓,李扬,高赐威.智能电网框架下的需求侧管理展望与思考[J].电力系统自动化,2009,33(20):17-22.
[2] 李作锋,黄奇峰,杨世海,等.适应新型电力供需的多元化友好互动体系研究[J].江苏电机工程,2016,35(5):1-5.
[3] 刘小聪,王蓓蓓,李扬,等.智能电网下计及用户侧互动的发电日前调度计划模型[J].中国电机工程学报,2013,33(1):30-38.
[4] 章欣,杨湘江,徐英辉,等.智能用电与现代量测技术[M].北京:中国电力出版社,2012.
[5] 陈亮,律方成,谢庆,等.实时测量双向通信智能电表的研发[J].中国电机工程学报(增刊),2011(31):94-99.
[6] 苏慧玲,刘建,龚丹,等.大规模电能计量器具智能检定的优化调度策略探讨[J].电力系统保护与控制,2015,43(11):75-79.
[7] 牟龙华,朱国锋,朱吉然.基于智能电网的智能用户端设计[J].电力系统保护与控制,2010,38(21):53-56.
[8] 中商产业研究院.2014-2018年中国智能电表行业市场研究报告[R].深圳:中商产业研究院,2014.
[9] 李娟,徐晴,沈秋英.计量检定配送业务省级集中江苏试点实践[J].电力需求侧管理,2012,14(5):51-53.
[10]刘光琦,侯诣卓.第四次工业革命下中国产业面临冲击与机遇[J].中国储运,2014(10):100-101.
[11]宋国江.两化融合对工业控制系统安全建设的思考[J].信息安全与通信保密,2014(6):61.
[12]何海燕,单捷飞.基于三链动态模型的我国两化深度融合发展战略体系研究[J].科技进度与对策,2014,31(7):60-64.
[13]安琳.借鉴德国“工业4.0”加快我国制造业转型升级[J].电器工业,2014(7):32-34.
[14]邵雪松,高羽翔,宋瑞鹏,等.多目标复合AGV调度系统建模及在电力计量检定中的应用[J].江苏电机工程,2016,35(5):24-27.
[15]王一,程浩忠.计及输电阻塞的帕累托最优多目标电网规划[J].中国电机工程学报,2008,28(13):132-138.
[16]董振斌,张亮,高赐威.基于配送路径优化的换电网络一体化调度研究[J].江苏电机工程,2016,35(4):44-50.
Collaborative Application of the Discrete Automation Verification of Smart Meter
SU Huiling1,2,WANG Zhongdong1,2,CAI Qixin1,2
(1.State Grid Jiangsu Electric Power Company Research Institute,Nanjing 211100,China;
2.Energy Measurement Key Laboratory of State Grid Corporation of China,Nanjing 211100,China)
A multi-system collaborative operation scheme is proposed to implement optimize operation of automation verification system of smart power meters.Firstly,from the physical layer of device,based on the characteristics of discrete automation verification of electrical power meters,the whole verification system is divided into several subsystems according to the device class,scheduling control mode of the discrete automation verification devices is constructed.Secondly,combining with features of each subsystem and its functions in device scheduling control mode,based on priority,the automatic “meter pointed” process of the scheduling system is designed,the automated guided vehicle (AGV) strategy is put forward,and the load/unload rules of the rail guided vehicle (RGV) control subsystem is setup.The scheduling control mode of the seal and labeling subsystem is established by using feedforward-feedback verification mechanism.Thirdly,based on synergy theory and Pareto multi-object optimization method,the collaborative optimization scheduling model of discrete automation verification system is setup.Finally,the scheme of collaborative operation platform of discrete automation verification is constructed.The practical engineering application proves the high efficiency and feasibility of this achievement.
Smart grid; Collaborative; Discrete; Scheduling control; Automation verification; Smart meter
苏慧玲(1983— ),女,博士,工程师,主要从事智能用电、电力计量自动化检定方向的研究。E-mail:suhuil@163.com。
TH18;TP27
A
10.16086/j.cnki.issn1000-0380.201707024
修改稿收到日期:2017-01-12
猜你喜欢
广东教育·高中(2023年9期)2023-09-28 11:41:28
机械管理开发(2022年7期)2022-08-08 02:29:10
数学小灵通(1-2年级)(2021年11期)2021-12-02 01:30:12
小哥白尼(军事科学)(2020年6期)2020-05-22 06:24:10
山西建筑(2020年10期)2020-05-19 07:11:02
金桥(2020年12期)2020-04-13 05:50:54
幽默大师(2020年3期)2020-04-01 12:01:08
中学生数理化·中考版(2019年12期)2019-09-23 06:23:50
电影(2019年2期)2019-03-05 08:33:30
导航定位与授时(2016年6期)2016-03-16 09:33:28
