
基于杆塔的无人机巡线通信中继方案设计
2017-07-19 12:07吴劲晖时满红
山东电力技术 2017年6期
吴劲晖,王 彬,时满红,王 前
(1.浙江省电力调度通信中心,浙江 杭州 310007;2.国家电网浙江省电力公司,浙江 杭州 311200;3.空军预警学院,湖北 武汉 430019)
基于杆塔的无人机巡线通信中继方案设计
吴劲晖1,王 彬2,时满红3,王 前3
(1.浙江省电力调度通信中心,浙江 杭州 310007;2.国家电网浙江省电力公司,浙江 杭州 311200;3.空军预警学院,湖北 武汉 430019)
针对无人机巡线作业中通信中继电台部署问题,通过对无线信道的衰落特性深入分析,综合考虑自由空间传播损耗和多径衰落,给出一种无线信号复合衰落模型和中继电台覆盖模型,并就电力线巡检中常遇到的平地场景和山地场景给出了中继电台的部署方案,对其中的两种场景进行了实验验证。研究和实验结果对无人机巡线业务的拓展特别是中继电台部署具有重要的参考价值。
电力线巡检;无人机;通信;中继
0 引言
随着我国经济的不断发展,对电力系统的需求和依赖程度不断增加,电网安全越来越受到社会大众的广泛关注。输电线路作为电网系统中非常重要的组成部分,更需要在安全巡检上不断加强。电网规模的不断扩大,不仅提高了电网事故的发生概率,而且使得电网巡检的工作量与难度也随之增加。而利用无人机巡检电力线路,具有不受地形环境限制、费效比低等优势,同时无需顾虑其意外坠毁可能导致的人员伤亡等问题,因此备受电力行业的欢迎[1-2]。
无人机巡检技术融合了航空、遥感、电子、电力、飞行控制、通信、图像识别等多个高尖技术领域,实现起来难度比较大,世界范围内专门研究无人机电力线巡检技术的并不多。在国外,虽然无人机巡检技术研究较早,但利用无人机巡检电力线的研究当前只侧重在图像识别和数据处理等方面[3-4]。相比之下,国内的研究水平还较低。2007年3月,广西桂能信息公司承接华北电网北京超高压公司项目,对源霸双回输电线路进行直升机巡检,开创了国内直升机载激光雷达巡检的先河。国家电网公司电力机器人在实验室进行无人直升机的巡检研究,取得了阶段性成果[5]。湖南省电力科学研究院利用四旋翼UAV在冬季导线严重覆冰的情况下进行巡检实验,总结出四旋翼UAV巡检的一些缺陷,并设计了改进措施。此外,江西、辽宁、广东、云南、贵州等省级电网公司也进行过UAV巡检的尝试,不过大多是购买UAV产品搭载相机、热像仪等设备进行巡检拍摄,技术上并没有更进一步的提高。
无人机巡线中的关键技术之一就是无线通信技术,是指对无人机进行遥控、遥测、跟踪定位和信息传输的技术。信息传输是指无人机任务载荷传感器观测信息下传至控制中心的信息传输过程[6]。无线通信系统由机载模块、中继模块(可选)和地面站模块3部分组成[7]。其中,中继模块可以固定装设在线路杆塔上也可通过中继无人机搭载。研究表明,中继模块的安装方式将直接影响无人机的任务规划设计,而中继模块的安装方式受中继模块的通信覆盖性能的严重影响。目前,关于无人机巡线中的中继电台的通信覆盖范围及相应的中继电台部署方案国内外还没有专门的研究文献和成果。因此,在综合考虑传播路径损耗和多径衰落的基础上,分析了无人机与中继电台之间特定频段衰落特性,给出一种信道复合衰落模型,并针对平地场景和典型山地场景提出了中继电台的部署方案,经过实验能够满足无人机超视距通信的实际需求,验证了研究的中继电台部署方案在无人机巡线中具有重要参考意义。
1 通信链路中的中继模式
在进行电力线路巡视的过程中,无人机采用直通和中继两种模式与地面控制中心通信。直通模式只用在无人机距离地面控制中心较近且没有任何障碍物的情况下。中继模式中,无人机通过中继电台向地面控制中心下传数据,并接收控制中心的控制指令。
在具体的线路巡视中,要解决山体阻挡及输电线路电磁干扰,扩展无人机巡视的距离,必须采用中继模式进行信息传输。无人机的中继模式有地面中继和空中中继2种。地面中继模式是将中继设备安装在某个线路塔上,其结构简单、维护方便、成本较低。而空中中继模式是通过增加一定数量的中继飞机扩大无人机的巡视范围,由于无人机数量的增加,必定会使系统复杂度提高、降低系统的可靠性,并提高系统成本。相比空中中继模式,地面中继模式是未来无人机巡线中继模式的一个很好选择。因此,研究无人机巡线的中继电台部署方案,对拓展无人机巡线作业范围,最大限度地发挥无人机在巡线作业中的优势具有重要意义。无人机巡线地面中继模式的通信链路模型如图1所示,无人机与中继电台之间通过无线实现通信,各中继电台与地面控制中心通过光纤连接实现通信。

图1 地面中继模式模型
2 信道衰落模型
无线信号传播过程中通常受到路径损耗、阴影衰落和多径衰落3种因素影响,导致中继链路的最大传输距离不确定。路径损耗表示大尺度范围内无线信号传播损耗的均值,地空通信环境下可近似等于自由空间传播损耗。阴影衰落是由于在电波传播过程中,遇到起伏的山丘、建筑物、树林等障碍物阻挡,形成电波的阴影区,造成信号场强中值的缓慢变化。多径衰落是由于接收端收到的信号是经过折射、反射和直射等不同路径传播来的多个信号的叠加,从而造成接收信号起伏急剧变化,误码率增加。
根据无线电频谱的划分规定,2.4GHz频段为免费频段,该频段的使用不需向无线电委员会申请,因此,几乎所有的民用无人机通信、蓝牙、WiFi等都使用该频段。所以,研究中所用的地面中继电台与无人机通信电台的中心频率均设为2.45GHz。该频段通信的一个显著特点是通信频率高、通信设备之间是视距通信,多径衰落和自由空间传播损耗是影响电波传播距离的主要因素。
电波自由空间传播损耗为

式中:d为传播距离,m;λ为无线电波波长,m。使用对数表达方式,自由空间传播损耗可表示为

式中:f为载波频率,MHz;d为传播距离,km。
多径衰落表示在慢衰落基础上接收信号幅值的快速起伏,目前广泛采用Nakagami模型,Nakagami分布可表示为

式中:l为接收机与发射机的相对距离,m;Ls为多径随机衰落平均功率,dBm,Ls此处取自由空间传播损耗的衰落功率;m≥0表示衰落因子,用于描述信道衰落的恶劣程度,值越小信道越恶劣,实测m=1.2~10;Γ(·)是Gamma函数。
结合多径衰落和自由空间传输损耗,将(1)式代入(3)式可得信道复合衰落分布为

3 中继电台覆盖模型
借鉴文献[8]覆盖半径计算思路,通过计算不同传播距离时的通信中断概率,确定中继电台覆盖半径。
中继电台发射信号功率为PT,dBm;无人机接收灵敏度为RS,dBm;中继电台天线增益为,dBi;无人机机载天线增益为GT,dBi;系统增益为GP,dB;系统裕量为SFM,dB。若系统能够正常通信,信道衰落L必须满足:


通信畅通(满足接收信号最小功率要求)的概率为

若假设接收机中断通信的概率 Pout不超过 rmax(系统正常通信允许的最大中断概率)时系统就能正常工作,则此时的中继通信电台的覆盖模型(最大覆盖半径)为

式中:

4 中继电台布置方案
4.1 仿真分析
为了便于后续中继电台部署方案的研究分析,参考某预研的无人机巡线项目的参数,按照前面的分析得到的中继电台覆盖模型通过数值仿真给出典型系统的通信覆盖范围。
假设中继电台发射信号功率PT=27 dBm;中继电台天线增益为GT=3 dBi;无人机机载天线增益为GR=3 dBi;系统增益GP=1;系统裕量SFM大于15 dB;衰落因子m=10。根据中继电台覆盖模型仿真可得无人机接收灵敏度分别为RS=-95 dBm,-90 dBm,-85 dBm,-80 dBm,-75 dBm,-70 dBm时,系统能够正常通信的时间概率随通信距离的变化曲线,如图2所示。

图2 正常通信的时间概率随通信距离的变化曲线
假设正常通信概率大于0.9时系统就能够正常通信 (假设后续所选用的信道编码及其他处理措施可以保证系统在中断概率小于0.1时可以正常通信),不同无人机接收灵敏度条件下的通信距离的典型值如表1所示。由仿真结论可以看出,当接收机灵敏度只有-90 dBm时,中继电台的最大覆盖半径只有1 860m。

表1 不同接收灵敏度下通信距离
4.2 中继点部署方案
按照50 km巡线范围,假设:相邻两个电力线铁塔之间距离为600m,无人机巡线通信设备参数与4.1节仿真参数相同,系统在中断概率小于0.1时可以正常通信,接收机灵敏度为-90 dBm,考虑多径衰落。则根据4.1节仿真结果,单个中继电台覆盖半径不超过1 860m,即最长可以覆盖3.72 km的传输线路。设置平地、山地两种场景,分析中继点部署方案。
4.2.1 平地场景中继点部署方案
相邻两个铁塔之间距离为600m,为保证中继电台对整个电力线路的无缝覆盖,在相邻中继节点之间的信号有120m重叠区域条件下,中继点部署方案为:每隔5个铁塔部署1个中继电台(每6个铁塔部署1个中继电台),50km巡线范围至少需要部署14个中继电台。
4.2.2 山地场景中继点部署方案
由于山区场景下的山体具体情况复杂,衰落更为严重,中继电台的信号覆盖范围较平原地带应该有所缩小,中继点部署方案只有在确定输电线路铁塔安装地点和周边山体自然情况后,通过实际测量才能确定,否则极有可能出现中继信号的覆盖盲区。因此,在山地部署中继电台应该适当增加相邻中继电台的信号重叠范围,并将中继点尽量部署在待覆盖区域的最高点处,从而最大化中继点的覆盖范围。下面给出3种情况下的山地场景中继点部署方案。
1)输电线路连续跨越两个以上山体时,且相邻山体最高点距离小于3.7 km时,在相邻两山体最高点各架设1个中继电台。输电线跨越近距离山体中继电台部署方案如图3所示。
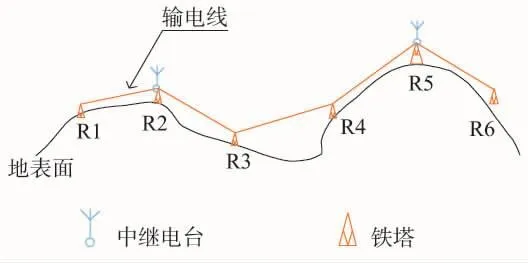
图3 输电线跨越近距离山体中继电台部署方案
2)输电线路连续跨越两个以上山体时,且相邻山体最高点距离大于3.7 km时,在相邻两山体最高点各架设1个中继电台,两山体中间输电线路铁塔应视情况架设1个或多个中继电台。输电线跨越远距离山体中继电台部署方案如图4所示。

图4 输电线跨越远距离山体中继电台部署方案
3)输电线路沿山脉走势架设(输电线与山脉走势基本平行)。此时输电线不需要跨越山体,铁塔之间没有高达障碍物,中继点部署方案与平原地区的中继点部署方案相同即每隔5个铁塔部署1个中继电台,50 km巡线范围至少需要部署14个中继电台。输电线沿山脉架设中继电台部署方案如图5所示。

图5 输电线沿山脉架设中继电台部署方案
5 实验验证
依托现有条件对中继电台部署的部分方案进行实验验证。
实验1:平地场景中继点部署方案验证。
根据平地场景中继点部署方案要求,在某机场构造实验环境,每间隔3 km的地面上部署1个中继电台,在沿跑道方向上共部署4个中继电台,覆盖距离约12 km。实验中无人机沿跑道直线方向最远飞行距离11 km,实现了超视距飞行,飞行过程中保持了通信的连续、畅通,视频信息回传正常。
实验2:山地场景中继点部署方案验证。
在浙江绍兴一段实验线路开展实验。该实验线路共有6级杆塔,跨越2个山体,相邻山体最高点距离为2.8 km,该实验线路符合4.2中方案1的环境特征。采取在相邻两山体最高点各架设1个中继电台的方案。实验中无人机在有遮蔽的情况下,跨越山体飞行20min,飞行距离3.2 km,飞行过程中能够保持通信的连续、畅通,视频信息回传正常。
实验结果验证了通信中继方案是合理、可行的。
6 结语
无人机作为一种新技术,其巡检电力线路具有不受地形环境限制、可靠性和安全性高、费效比低等优势。然而,无人机巡线中的中继电台的安装方式受中继电台通信覆盖性能的严重影响。假设所研究的无人机巡线的中继电台安装在电力线铁塔上,对无线信道的衰落特性进行了深入分析,给出无线信号复合衰落模型和中继电台覆盖模型。随后,就电力线巡检中常遇到的平地场景和山地场景给出了中继电台的部署方案,并对平地场景中继点部署方案和山地场景中继点部署的第1种方案进行实验验证。研究和实验结果对无人机巡线通信中继建设具有重要参考价值。
[1]于德明,武艺,陈方东,等.直升机在特高压交流输电线路巡视中的应用[J].电网技术,2010,34(2):29-32.
[2]邵允临,曹晋恩,尚大伟.直升机巡检华北电网超高压输电线路[J].中国电力,2003,36(7):35-38.
[3]李力.无人机输电线路巡线技术及其应用研究[D].长沙:长沙理工大学,2012.
[4]成刚,杨随虎.无人机机载光电系统综述[J].应用光学,2005,26(4):1-4.
[5]厉秉强,王骞,王滨海,等.利用无人直升机巡检输电线路[J].山东电力技术,2010,37(1):1-4.
[6]YONG WA,KIM D,DARE P,etal.Estimation of troposphere decorrelation using the combined zenith-dependent parameter[C]. Proceedings of Ion Gnss,2008.
[7]MEJIAS L,CORREA JF,MONDRAGON I,etal.COLIBRI:AVision-guided UAV for Surveillance and Visual Inspection[C]. IEEE International Conference on Robotics&Automation,2007.
[8]朱秋明,周生奎,霍帅珂,等.无人机中继平台覆盖区域统计模型[J].航空学报,2014,35(1)223-229.
Design of Relay Scheme for UAV Line Patrol Communication Based on Tower
WU Jinhui1,WANG Bin2,SHIManhong3,WANG Qian3
(1.Zhejiang Electric Power Dispatching and Communication Center,Hangzhou 310007,China;2.State Grid Zhejiang Electric Power Company,Hangzhou 311200,China;3.Air Force EarlyWarning Academy,Wuhan 430019,China)
Aiming at solving the problem of deploying and distributing the communication relay stations for operating UAVs for power-line inspection,amodel ofwireless signal decay and relay coverage is developed and presented in this paper.Thismodel is derived through in-depth analysis of the characteristic of attenuation of the wireless signals,taking the free space propagation loss and multipath fading into consideration.The deployment strategies of the relay station are discussed for the plat ground and mountainous situation respectively as they are the most frequent situation during the power-line inspection.The model are verified by experiments for two specific sites.Research and experimental results provides valuable data for the future developmentof the UAV-patrol-operation,especially on the relay station deployment.
power line inspection;UAV;communication;relay
TM755
A
1007-9904(2017)06-0049-04
2016-12-06
吴劲晖(1971),男,高级工程师,从事电力系统自动化研究工作。
猜你喜欢
中国电业与能源(2021年4期)2021-05-22
广西电业(2020年11期)2020-03-23
山东林业科技(2019年2期)2019-06-03
数据采集与处理(2018年6期)2018-12-19
无人机(2018年1期)2018-07-05
航天器工程(2015年3期)2015-10-28
电测与仪表(2015年3期)2015-04-09
人间(2015年21期)2015-03-11
电子设计工程(2015年16期)2015-02-27
中国工程咨询(2015年5期)2015-02-16
