
高精度PID控制恒流源
2017-07-19 11:38程方晓王海彪
长春工业大学学报 2017年3期
刘 璐, 程方晓, 王海彪
(长春工业大学 电气与电子工程学院, 吉林 长春 130012)
高精度PID控制恒流源
刘 璐, 程方晓*, 王海彪
(长春工业大学 电气与电子工程学院, 吉林 长春 130012)
采用增量型PID控制算法和脉宽调制技术(PWM)控制串联开关型稳压电路的电流输出。采用单片机实时控制,辅以键盘控制、LCD显示,并通过A/D采样、D/A转换实现恒流控制。
微处理器; 恒流控制; PID控制; PWM; 无静差
0 引 言
目前国内的直流恒流源主要利用单片机和可编程系统器件(Programmable System Device,PSD)控制开关直流稳压电源或数字化电压单元以达到数控的目的,其智能化程度较低。现在市场上广泛流通的大部分恒流源产品的精度和稳定性又较低,通常不能完全满足具体的实验要求,而性能较好的恒流源价格又较为昂贵。
恒流源是输出电流保持恒定的电流源装置,在金属丝杨氏模量测量、金属薄膜电阻率测量、光电效应、磁阻效应及光电池特性测量等大学物理实验中广泛应用[1]。传统的恒流源往往采用电位器调节输出电流,不仅无法实现精确步进,且精度较低[2]。目前,恒流源的发展面向数字化,多采用模数和数模转换器以实现数字化控制,具有高精度、高稳定性、强拓宽性等特点[3]。
文中采用STM32作为核心控制单元,选用16位高精度的D/A转换器MAX541和24位高精度的A/D转换器ADS1211,实现了高精度数控直流恒流源的设计,该恒流源的输出电流可在0~2 000 mA内任意设定,具有输出电流范围宽、不随负载和环境温度变化而变化,且输出电流精度高、误差小等特点,在大多数需要高稳定、小功率恒流源的领域具有使用价值。
1 增量型PID控制
PID控制是过程控制中广泛应用的一种控制方法,按照偏差的比例、积分、微分进行调节的控制器简称PID控制器[4-5]。多年来,在PID基本算法的基础上,衍生出了非线性PID、选择性PID以及增益自适应PID等多种PID控制算法。
传统PID控制器的理想化方程为:
(1)
式中:KP----比例放大系数;
TI----积分时间;
TD----微分时间。
从方程中可以看出,比例作用P与偏差成正比,积分作用I是偏差对时间的积累,微分作用D是偏差的变化率。其中,比例控制能迅速反应误差,从而减少稳态误差。除了系统的控制输入为零和系统的控制值等于期望值这两种情况,比例控制都能很好地给出稳态误差;在积分控制中,控制器的输出与输入误差信号的积分成正比。为了减小稳态误差,在控制器中加入了积分项,积分项是误差对于时间的积分,这样即使误差e(t)很小,随着时间的增加,积分项也会随之增大。它将推动着控制器的输出增大,使稳态误差减小,直至趋近于零;在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比,自动控制系统中,微分项的引入是由于较大的惯性组件(环节)或滞后组件的存在,使在调节的过程中可能会出现过冲甚至振荡。
增量式PID算法是在传统PID算法的基础上离散化得到的,与位置式PID算法相比,计算量小得多,在实际中得到广泛应用。其控制规律如下:
(2)
式中:k----采样序号,k=1,2,…;
U(k)----第k次采样时刻的输出量;
E(k)----第k次采样时刻的输入偏差量;
KP----比例系数;
KI----积分系数;
KD----微分系数。
由递推的方法可得控制器第k-1个采样时刻的输出为:
(3)
将式(2)和式(3)做差可得:
(4)
其中ΔU(k)为系统每相邻两次输出的增量,将每次计算得到的增量累加到上一采样时刻的输出量U(k-1)中,即U(k)=U(k-1)+ΔU(k),这就是增量式PID算法的原理[6]。
可以看出,只要使用前后三次采样时刻k、k-1、k-2测量的偏差值,就可以由式(4)求出控制量。
2 恒流源系统设计
2.1 系统结构框图
恒流源系统主要由电流反馈控制电路、A/D和D/A转换电路及供电电源组成。以单片机STM32为核心控制单元,通过键盘输入对电流值进行预置,经单片机处理后输出相应的控制信号,通过D/A转换将其转换为模拟信号,将模拟信号放大及电平转换后输入到电流反馈控制电路中,使其输出相应的电流值。
本系统采用串联开关型稳压电路控制电流的稳定输出,将增量型PID控制算法与PWM脉宽调制技术相结合,电路中引入采样电流反馈,构成了基于数字控制器的闭环控制系统,通过对采样电流的准确控制,以实现对负载电流的准确控制。系统总体结构框图如图1所示。

图1 系统总体结构框图
2.2 硬件电路设计
系统的硬件电路按照功能可分为电流反馈控制电路和数控电路。电流反馈控制电路是电流的生成单元,控制信号通过此电路产生相应的输出电流。因此电流反馈控制电路的精确性、稳定性以及带负载能力决定着整个系统的性能[7]。数控电路是恒流源的控制单元,其主要实现对恒流源电路的输出控制,实现输出电流值的可调操作,以及控制过程和输出结果的可视化操作[8]。
2.2.1 电流反馈控制电路
电流反馈控制电路是整个恒流源电路系统设计的核心,电路如图2所示。
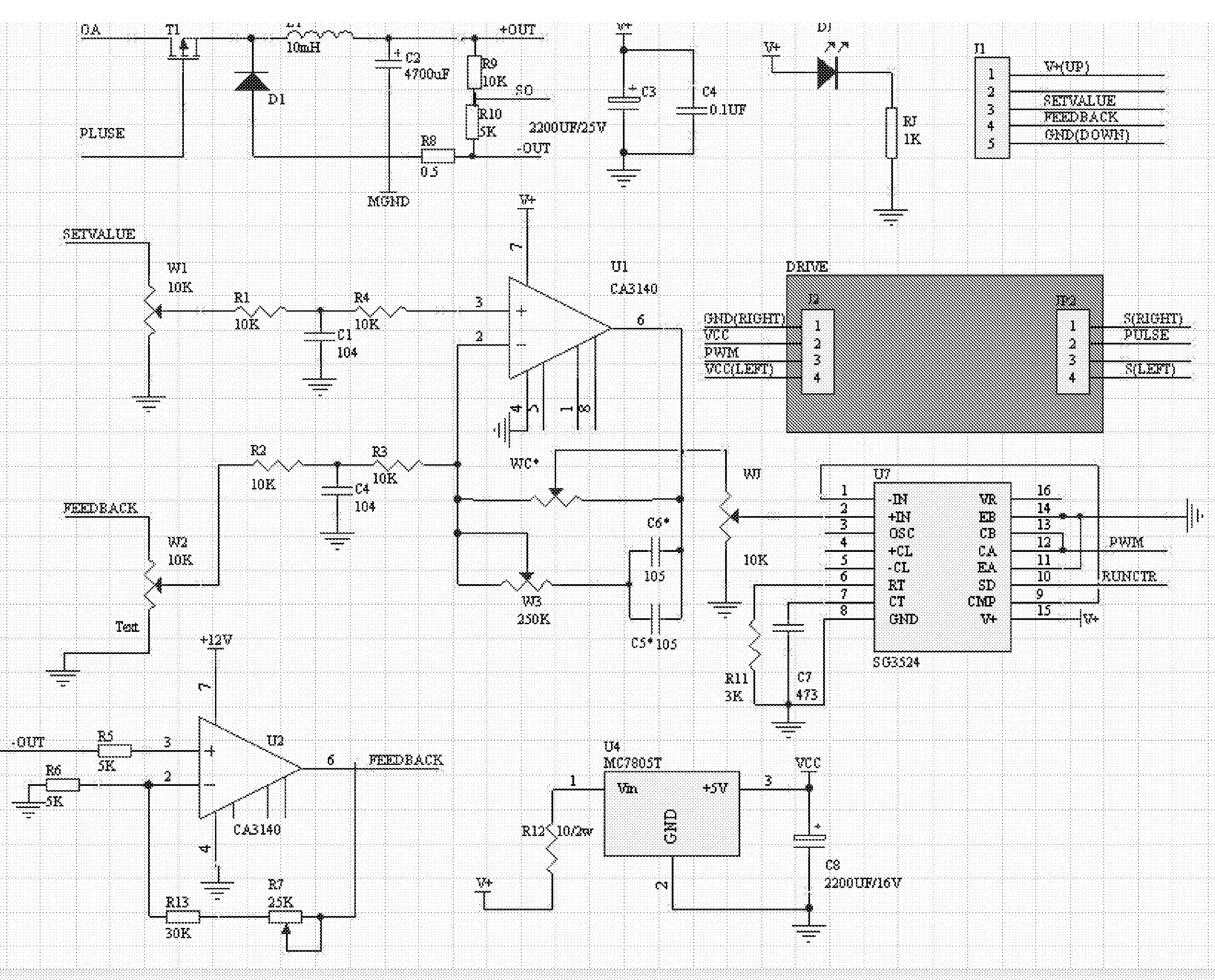
图2 电流反馈控制电路
此部分电路设计选用高输入阻抗运算放大器CA3140作为放大元件,利用SG3524作为PWM控制芯片。另外,采用串联开关型稳压电路和PID调节器构成的开关恒流源电路,通过PID控制器调节采样电流与设定电流的偏差值,从而控制PWM电路输出的脉冲频率。同时,我们采用了DC-DC和光电耦合器隔离,不仅满足了触发电路对于电源的需求,而且很好地实现了高压电路与低压电路的隔离,保证了电路的安全。反馈增量式PID控制器的使用,有效地提高了调节速度,充分满足了系统对于实时性的要求。
2.2.2 D/A和A/D转换电路
考虑到恒流源对输出电流范围的要求和尽可能的提高输出分辨率,在电路设计中D/A模块需要满足的分辨率为0.000 5,即需要分辨率为11位的D/A转换器。我们选择的是16位精度的MAX541。其引脚功能见表1。

表1 MAX541引脚功能
D/A和A/D转换电路如图3所示。
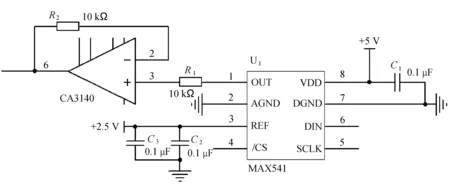
(a) D/A转换电路

(b) A/D 转换电路
为了精确测量输出电流,选用A/D转换芯片ADS1211。它具有高精度、高动态范围且内含自校正∑-Δ转换器,有较高的分辨能力,能够采样毫伏级信号,实现输出电流的反馈。
2.2.3 数控电路
数控电路部分是恒流源实现数字化控制的核心。系统以STM32为核心,利用D/A转换电路实现恒流源输出电流大小的控制,利用A/D转换电路实现输出电流的测量,利用键盘和显示电路实现人机交互。其中,采用4×4矩阵键盘[9],用于电流给定值的数字化设定。0~9十个数字键,用于输入的量值;一个符号“.”;一个设定键,用来开始设定输入量值;一个运行键,用于启动系统;两个步进调整键“+”、“-”用于电流值的步进调整。
考虑到电流设定值和实测值等4个量值和系统状态信息的显示,系统采用点阵式128×64型LCD12864液晶显示器。该模块接口方式灵活,操作指令简单、方便,可构成全中文人机交互图形界面;可以显示8×4行,16×16点阵的汉字,也可完成图形显示。
2.2.4 保护电路的设计
保护电路如图4所示。
采用LM339构成的单限比较器用于电路的开路和短路保护。恒流源短路时,采样电流大于2 000 mA,输出电压大于1 V,因此短路保护比较器的Vin选用1.2 V左右。恒流源断路时,两端子之间的电压接近满量程24 V,根据分压原理可知,断路比较器的Vin应接近8 V。当恒流源短路或断路时,输出为低电平,反馈给PWM,让其停止,从而达到保护功能。
3 软件设计
软件设计流程如图5所示。
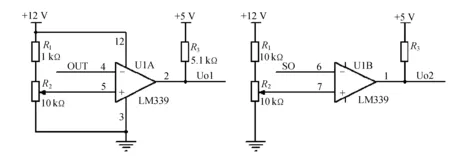
图4 保护电路

图5 系统控制主程序流程
系统主程序主要实现系统初始化、按键检测、给定值读入以及执行相应的键盘散转程序。
4 系统调试与指标测试
4.1 测试仪器与方法
调试采用自上而下、模块化调试的方法,先进行分块调试,然后连调,提高了测试效率。测试使用的仪器设备见表2。
4.2 测试数据
供电电压与负载变化时电流设定值与采样值测试数据曲线如图6所示。
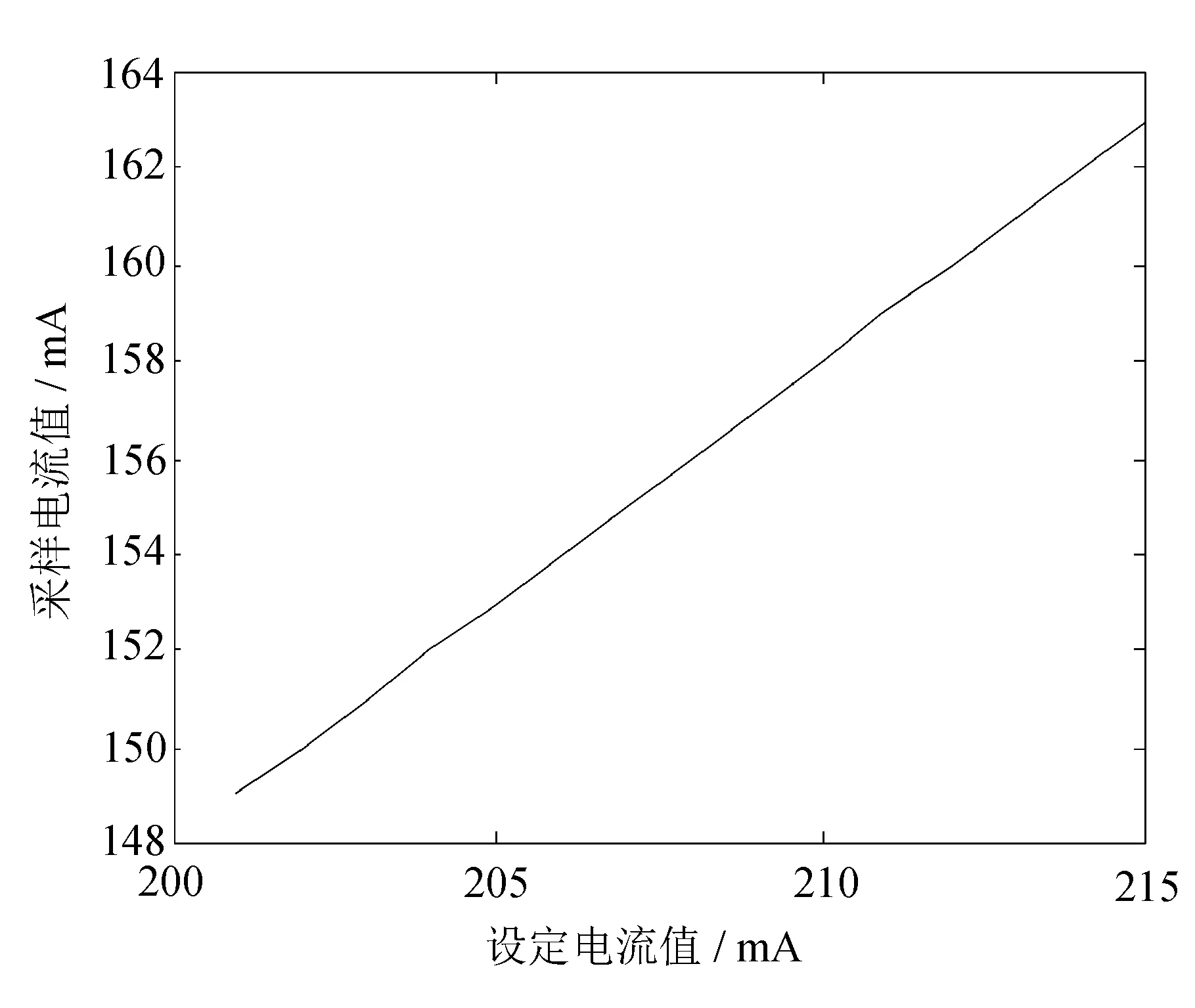
(a) 24VDC供电,负载为5 Ω时电流设定值与采样值测试数据曲线

(b) 20VDC供电,负载为5 Ω时电流设定值与采样值测试数据曲线
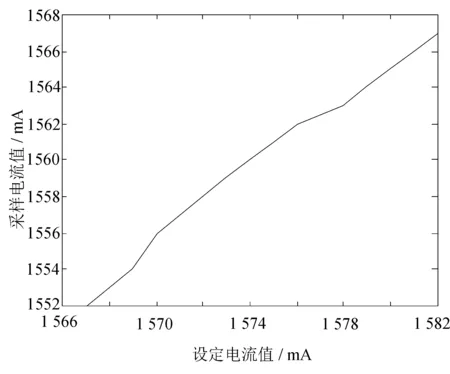
(c) 24VDC供电,负载为10 Ω时电流设定值与采样值测试数据曲线
24VDC供电,负载为5 Ω时进行测试,其部分数据测试结果见图6(a)。20VDC供电,负载为5 Ω时测试,其部分数据测试结果见图6(b)。24VDC供电,负载为10 Ω时测试,其部分数据测试结果见图6(c)。
将设定电流以10 mA步进从0~2 000 mA进行了采样测试,将采集来的数据经过excel进行拟合,得出了采样电流与设定电流的拟合直线:

(5)
分别在25%、50%、75%、100%这4种负载状态下对电源的效率进行测试,得到4种负载状态下的效率平均值,同时对输入电压、输入电流、输出电压、输出电流进行了测量,选取部分数据见表3。

表3 在25%、50%、75%、100%这4种负载状态下的效率的平均值

续表3
由测量数据的统计分析可知,恒流源系统的效率达到75%以上。
恒流源电路的输出电流在0~2 000 mA范围内连续变化,电源的效率高、线性度好,同时具有结构简单、安全、稳定的优点。此恒流源可作为磁流变阻尼器的驱动电源,也可应用于其他领域。
5 结 语
系统以STM32单片机为核心,以串联开关型稳压电路控制电流的稳定输出,将增量型PID控制算法与PWM脉宽调制技术相结合,引入采样电流反馈,构成基于数字控制器的闭环控制系统,通过对采样电流的准确控制,实现了对负载电流的准确控制。系统采用闭环控制并且应用了积分控制,具有效率高,调节快速无超调,动态抗干扰性能好、可靠性和性价比高等特点,具有较好的推广使用价值。
[1] 吴茂成.高精度宽范围恒流源设计[J].电测与仪表,2011(1):64-66.
[2] 梁龙学.一种新型高精度数控直流电流源[J].兰州交通大学学报:自然科学版,2005,24(6):100-102.
[3] 黄天辰,贾嵩,余建华,等.高精度数控直流恒流源的设计与实现[J].仪表技术与传感器,2013(6):27-29.
[4] 迟耀丹,艾大鹏,杨小天,等.模糊自整定PID算法在应力速度控制系统设计中的应用[J].长春工业大学学报:自然科学版,2008,29(5):536-540.
[5] 隋添翼,李云鹏,于欢欢,等.PID广义预测控制在分子蒸馏中的应用[J].长春工业大学学报:自然科学版,2012,33(2):135-140.
[6] 宋和平,胡成全,王力风,等.新型双温度反馈增量式PID控制器的设计[J].自动化与仪表,2012(4):40-42,46.
[7] 常铁原,朱桂峰,胡重九.一种高稳定数控恒流源的设计[J].电测与仪表,2010(3):59-61,72.
[8] 刘凤君.现代逆变技术及应用[M].北京:电子工业出版社,2006.
[9] 张洪川,滕召胜,林海军,等.低功耗单电源压控精密恒流源设计[J].仪器仪表学报,2008,29(12):2678-2682.
A high-precision PID controlled constant current source
LIU Lu, CHENG Fangxiao*, WANG Haibiao
(School of Electrical & Electronic Engineering, Changchun University of Technology, Changchun 130012, China)
The current output of the tandem switching voltage circuit is controlled with increment PID algorithm and pulse width modulation (PWM) technology. The system is with MCU as real-time control core, keyboard control, LCD display. A/D sampling and D/A modules are used to realize constant current control.
MCU; constant flow control; PID control; PWM; no static error.
2017-03-15
吉林省科技厅基金资助项目(20170204038SF)
刘 璐(1992-),女,汉族,吉林长春人,长春工业大学硕士研究生,主要从事测控技术与智能系统方向研究,E-mail:liulu_myflora@163.com. *通讯作者:程方晓(1969-),女,汉族,吉林长春人,长春工业大学副教授,博士,主要从事测控技术与智能系统方向研究,E-mail:chengfangxiao@ccut.edu.cn.
10.15923/j.cnki.cn22-1382/t.2017.3.13
TM 933.1
A
1674-1374(2017)03-0282-07
猜你喜欢
汽车维护与修理(2019年3期)2019-08-08
汽车维护与修理(2018年5期)2018-09-29
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
汽车维护与修理(2018年23期)2018-07-03
北京航空航天大学学报(2017年9期)2017-12-18
汽车维护与修理(2017年5期)2017-11-17
中国测试(2017年8期)2017-09-11
光学精密工程(2016年3期)2016-11-07
测绘科学与工程(2016年6期)2016-04-17
