
ET0预测的卡尔曼滤波修正ANFIS模型研究
2017-07-19 10:03李志磊周建平魏正英张育斌
干旱地区农业研究 2017年3期
李志磊,周建平,魏正英,张育斌,许 燕
(1.新疆大学机械工程学院, 新疆 乌鲁木齐 830000; 2.西安交通大学机械制造系统工程国家重点实验室, 陕西 西安 710049)
ET0预测的卡尔曼滤波修正ANFIS模型研究
李志磊1,周建平1,魏正英2,张育斌2,许 燕1
(1.新疆大学机械工程学院, 新疆 乌鲁木齐 830000; 2.西安交通大学机械制造系统工程国家重点实验室, 陕西 西安 710049)
实时、准确地对作物需水量的预测是实现智能节水灌溉的关键技术。预测模型的合理选择及精度提高是作物需水决策系统的核心。本文将陕西西安地区的气象数据环境信息引入自适应神经模糊推理(ANFIS)作物参考蒸腾量(ET0)预测模型,应用卡尔曼滤波器对气象数据经ANFIS建模得到的ET0预测值进行滤波去噪,以提高模型的预测精度,并通过仿真和实验验证,从理论和实践两个方面来验证模型的精度。仿真结果得到,反映模型预测值与真实值之间拟合程度的均等系数(EC)值校正前为0.93,校正后达到0.98。实验结果得到,ANFIS预测模型的平均绝对误差是28.94%,平均相对误差是26.37%,卡尔曼修正后的ANFIS预测模型的平均绝对误差是7.24%,平均相对误差是6.59%。仿真和实验结果表明,利用卡尔曼滤波对ANFIS预测模型进行修正,可以提高预测的精度,经卡尔曼修正后的ANFIS模型能更佳地反映ET0的变化趋势。
作物参考蒸腾量;彭曼公式;ANFIS预测模型;卡尔曼滤波;预测精度
作物参考蒸腾量(ET0)是作物生长过程中一个非常重要的数据,实时、准确地对作物参考蒸腾量的预测是实现智能节水灌溉的关键技术,作物参考蒸腾量预测结果的好坏将直接影响作物的长势以及智能灌溉的效果。ET0反映的是大气蒸发能力与作物需水信息的关系,其计算具有地域性、时域性,与特定时间、特定地域的气象因素有关。模型法、温度法、经验公式法和综合法是常见的计算ET0的方法。当前,受国内外学者认可的是FAO-56 Penman-Monteith方法(PM法),该法利用大量的气象因素进行计算,结果较为准确,但需用的参数较多。使用PM公式计算ET0需要8个参数,包括:日最低气温(Tmin)、日最高气温(Tmax)、地理纬度、海拔、日平均相对湿度、实际日照时长(n)、风标高度及风速(Uh)。而其中的一些参数在气象资料短缺的条件下很难获取,因此很多地区对作物参考蒸发量的研究受到所需气象参数难以得到的限制[1-3]。而引入智能学习算法预测ET0能克服数据难以获得的困难。ET0预测的研究方法有多,非参数回归模型和自回归移动平均模型等方法是传统的预测方法,随着智能学习的进步与完善,比较新的预测研究方法主要有神经网络模型、支持向量机模型、混沌预测模型以及集成多种模型特点的组合预测方法等。但各种理论模型均存在自身的特点与缺陷,其中,回归模型存在受数据量限制的缺陷,神经网络等机器学习算法存在训练速度慢、时而出现不收敛的缺陷,且模型易受数据噪音的干扰造成预测精度的降低[4]。本论文将自适应神经模糊推理系统(ANFIS)作为ET0的预测模型,并通过卡尔曼滤波去除由作物环境信息带入到模型中的噪音。
1 卡尔曼滤波去噪原理
1.1 数据噪声来源
在作物生长状况信息感知环节,由于传感器本身的精度、硬件故障、人为因素以及周围环境等各种因素的干扰,现场传感器采集的作物长势及土壤墒情信息数据,会存在噪声和错误数据。因为预测模型输入数据的特征对模型的输出结果精度有影响,基于ANFIS建立的预测模型,由于模型的输入数据存在噪声,所以得到模型其输出的作物参考蒸腾量也是有误差的、不准确的。为了减小信息感知部分混杂的噪声对模型预测值的影响,提高预测模型的精度,有必要在得到模型预测值时对其进行校正,即对其进行处理分析。可以用滤波器对要分析的数据进行处理,消除信息感知部分携带到模型中的噪声,以及减少不确定因素的干扰[5-7]。
一般情况下,环境信息监控系统利用传感器采集的气象及作物土壤墒情信息是有一定的周期的,即得到的样本数据是不连续的。然而,考虑到卡尔曼滤波器正是用来处理非连续信号的,所以文中应用卡尔曼滤波器,对经环境信息监控系统采集到的气象及土壤信息数据进行去噪处理,然后将去噪后的数据进行训练得到预测模型,并用卡尔曼滤波器对其进行修正。卡尔曼滤波器根据系统提供的测量值以“预测-实测-修正”的递推顺序消除随机因素的干扰。
1.2 卡尔曼滤波去噪原理
卡尔曼滤波器由描述状态向量的过程方程和描述观测向量的观测方程组成。离散线性系统的卡尔曼滤波状态方程和观测方程可表示为[8]:
(1)
(2)
式中,Bk为tk时刻的观测矩阵;L(k+1)为t(k+1)时刻的观测向量;X(k+1)、Xk为状态向量在t(k+1)、tk时刻的状态向量;Δk为tk时刻的观测噪声向量;Γ(k+1,k)为动态噪声向量的系数阵;Φ(k+1,k)为状态转移矩阵;Ωk为tk时刻的动态噪声向量。
状态参数向量的预测值为:
(3)
其协方差阵为:
(4)
状态参数向量的滤波估计值是:
(5)
其协方差矩阵为:

(6)
滤波增益矩阵为:
(7)
预测残差向量为:
(8)
初始状态条件为:
(9)

卡尔曼滤波器去噪的原理是通过预测系统的上一时刻的最优估计值和当前时刻的观测值得到当前时刻的最佳估计值。卡尔曼滤波的算法流程如图1所示。将该原理运用到ANFIS预测模型中,将ANFIS的预测值作为系统的观测值。

图1 卡尔曼滤波的算法流程图
2 卡尔曼滤波修正的ANFIS预测模型设计
2.1 基于卡尔曼滤波修正的ANFIS预测模型建模
现场传感器采集的作物长势及土壤墒情信息数据,由于传感器本身的精度、硬件故障、人为因素以及周围环境等各种因素的干扰,会存在噪声和错误数据。运用ANFIS建立的预测模型,由于模型的输入数据存在噪声,所以ANFIS模型的作物参考蒸腾量输出也是有误差和不准确的,对其输出进行修正是必要的。修正模型的建模过程如图2所示。

图2 修正模型的建模过程
作物需水信息的预测模型一般是从传感器测得的土壤信息以及大量的气象数据中,提取有用的信息,通过训练构建气象数据与作物需水信息的数学关系。ET0的ANFIS预测模型其卡尔曼修正示意图如图3所示。

图3 卡尔曼滤波器修正示意图
2.2 模型评价指标
本文选择的评价指标其计算公式如下[9]:
平均绝对误差:
(10)
平均相对误差:
(11)
均方误差:
(12)
均方百分比误差:
(13)
均等系数:

(14)
2.3 仿真结果分析
笔者以西安市1978—2010年的气象数据为研究对象,对西安市1978—2010年的日气象资料及PM公式计算得到的ET0进行相关性分析。
由表1知,最高气温与ET0相关性最好(R=0.855),其次是最低气温(R=0.756),然后是相对湿度(R=-0.684)和日照时数(R=0.625)。日最高气温和日最低气温以及日照时数之间存在着显著相关性,由于在经典统计理论中,自变量之间有显著性相关关系时容易导致模型预测精度降低,因此模型的理想输入变量组合是最高气温和日平均相对湿度。为了提高模型的精度,模型输入个数可以适当增加。经分析,选取日最高气温、日平均相对湿度以及风速这3个变量作为模型的输入变量,参考作物蒸腾量为输出变量。
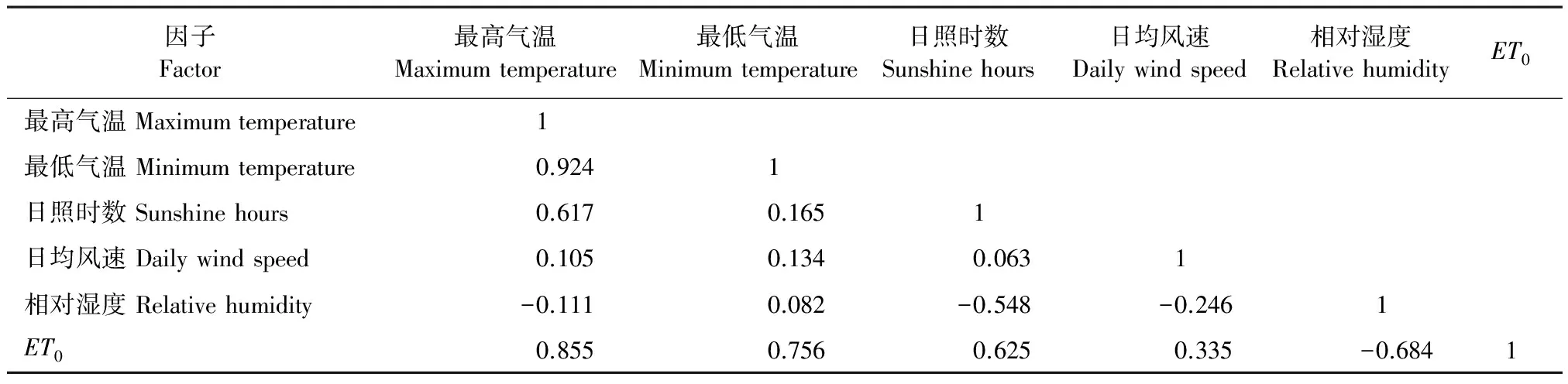
表1 各气象因子与ET0相关系数
取1978年的数据为训练数据,2010年的气象数据为检测数据建立ANFIS的参考作物蒸腾量预测模型,并测试。仿真结果如图4所示。
从图中可以得到ANFIS预测模型可以反映ET0的变换趋势,并且具有一定的预测能力。但是图中也存在PM计算值与ANFIS模型预测值相差比较大的点,这可能是系统中存在的噪音误差影响了模型精度的原因造成的。所以笔者应用卡尔曼滤波原理对ANFIS模型进行校正,即对模型预测值进行滤波处理,即将建模输出的ET0值作为卡尔曼滤波的输入变量,对其进行滤波处理。
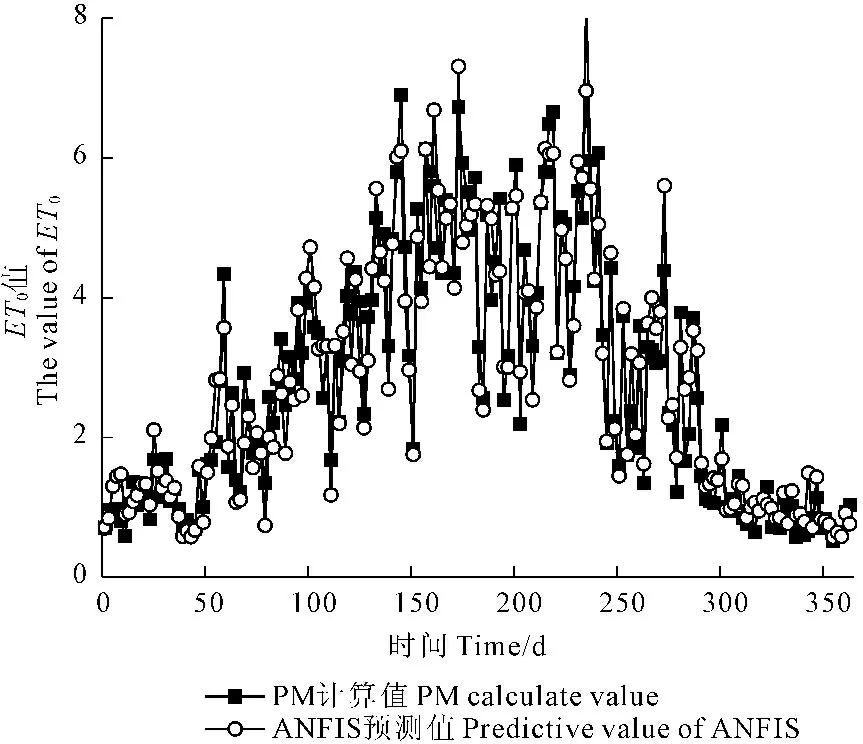
图4 ANFIS预测模型仿真结果图
结合前文所做的工作,通过对ANFIS预测模型的输出值进行滤波处理这一环节,最终得到了ET0的分析值。第一组是利用PM公式计算得到ET0的理论值;第二组是通过ANFIS模型得到的一组ET0预测值;第三组是最后对模型预测值利用卡尔曼滤波去除不确定误差后得到的一组ET0修正值。为了更加明了直观地说明模型修正前后的差异,选取一定间隔的数据为样本绘图,并且将三组结果数据同时放到一张分析图中进行对比,得到不同的方法最终得到ET0值的差异与联系。仿真效果比较如图5所示。
通过分析图中三条曲线可以得到,ANFIS预测模型可以预测ET0的值,在一定的误差允许范围内是可行的,但卡尔曼修正的ANFIS预测模型对ET0的预测值更加接近PM计算得到的ET0理想值,也即利用卡尔曼滤波将带入模型中的噪音过滤后,模型的预测精度提高了。为了更加清楚地突出不同模型的预测效果,文中将不同模型的指标绘制成表格,如表2所示。
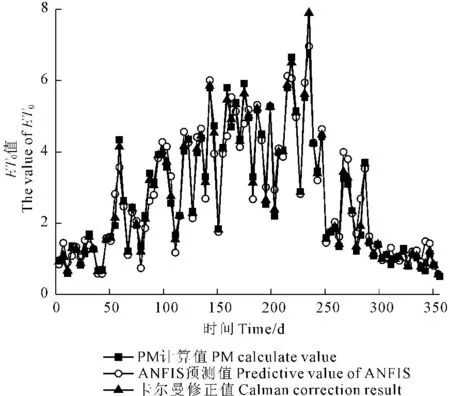
图5 仿真效果比较图

表2 模型指标对比表
由表2可以明了地看出,经卡尔曼滤波修正后的模型的平均绝对误差(MAE)由0.33降到了0.08,平均相对误差(MRE)由0.04降到了0.01,均方百分比误差(MSPE)由0.06降到了0.003,说明卡尔曼修正后的模型预测值更加接近PM计算值;均方误差(MSE)由0.20降到了0.01,说明卡尔曼修正后的模型误差分布更加集中;均等系数(EC)由0.93升到了0.98,说明卡尔曼修正后的模型得到的预测值与PM计算值拟合程度更好。由各项指标的变化可知,卡尔曼滤波修正后的预测模型更加接近PM公式计算值。
3 实验结果与分析
3.1 实验平台
为了比较ANFIS预测模型修正前后的性能,在智能灌溉控制机的平台上对模型进行测试。本实验平台示意图如图6所示。主要由首部运行控制器、电磁阀、水泵、电磁流量计、过滤器、压力变送器和土壤温湿度传感器及基于KBE的智能灌溉控制软件组成。传感器将采集到的土壤的温(湿)度、空气温(湿)度、光照强度以及一些气象信息等环境信息通过无线通讯的方式发送到基于KBE的智能决策系统中,由系统中的模型库得出土壤的水肥需求量。根据需求信息,首部运行控制器发送指令给进水管电磁阀,开启水路电磁阀,水路电磁流量计用来监测进水量,然后将进水量信息反馈给控制软件系统,实时调整水阀的状态。同时将肥路电磁阀开启,让肥液进入管路,根据农作物生长周期再结合专家系统,自动配比作物所需营养液浓度,水肥混合后进入灌溉主管道,对农作物进行现场精量灌溉。

图6 实验平台结构示意图
3.2 结果分析
为了验证卡尔曼滤波修正后的预测模型在现场灌溉的应用效果,利用搭建的智能灌溉控制机进行实验,图7为智能灌溉控制机实物图。
作物需水量可以通过参考作物蒸腾量ET0与相应农作物系数的乘积得到。本实验选取冬小麦为实验作物,其总生长期的需水系数取Kc=0.85。ET0由控制系统中的预测模型得到。水路的电磁流量计实时将水量发送给控制系统作为反馈,并显示在控制界面。本实验将ANFIS预测模型与卡尔曼滤波修正后的ANFIS预测模型做比较。模型的输入为温(湿)度传感器测得的数据以及气象预报发来的风速数据。

图7 智能灌溉控制机实物图
文中选取2015年10月30日到11月18日为实验日期,在预定时间读取流量计的值,将24组数据输入到决策系统的预测模型中,可以得到ET0的值。流量计反映的是灌水量的多少,所以将流量计采样的数据利用Matlab图像绘制成曲线图,图8为三种预测方法得到的水路流量曲线对比图。
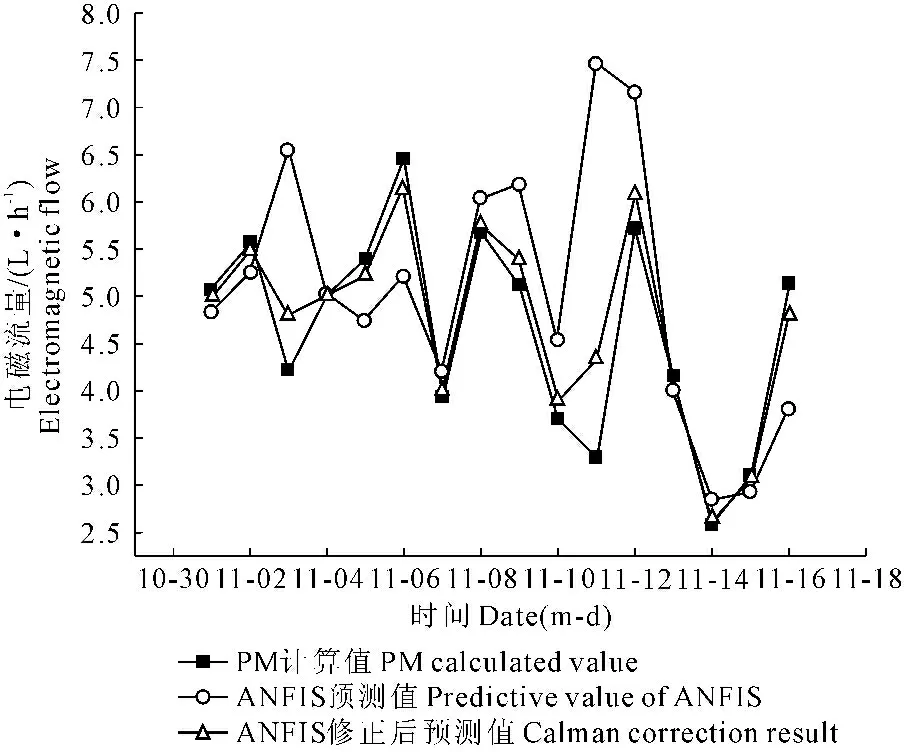
图8 实验结果对比图
图8中方块线条是利用PM公式计算ET0时得到的电磁流量计流量值,圆圈线条是利用ANFIS模型预测ET0值时得到的流量计流量值,三角形线条是经卡尔曼滤波器处理后ANFIS模型得到ET0时流量计流量值。通过分析图8中PM计算值、ANFIS预测值与ANFIS修正后的预测值折线图可以很直观明了地看到经卡尔曼滤波去噪处理后的ANFIS模型得到的预测值更加接近PM计算值。为了更加清楚地突出模型的实验效果,将实验过程中得到的模型性能指标列成表3。
由表3可以看出,经卡尔曼修正后的模型其平均绝对误差由0.289降至0.072,平均相对误差由0.263降至0.0695。证实了应用卡尔曼滤波原理的处理方法对预测模型进行校正可以提高预测模型的精度,提高预测结果的可靠性。

表3 实验得到的模型性能指标
4 结 论
滤波器能够将输入信号中的噪音滤掉,提炼出有用信号。考虑到这一点,笔者提出将卡尔曼滤波器应用到自适应神经模糊推理(ANFIS)预测模型的校正中。应用卡尔曼滤波器对气象数据经ANFIS建模得到的ET0预测值进行了滤波去噪。仿真及实验结果表明应用卡尔曼滤波原理的处理方法对预测模型进行校正可以提高预测模型的精度,提高预测结果的可靠性。
[1] 蔡甲冰,刘 钰,雷廷武,等.应用自适应神经模糊推理系统(ANFIS)的ET0预测[J].农业工程学报,2004,20(4):13-16.
[2] 张 兵,袁寿其,成 立,等.作物需水量自适应神经网络模糊系统的设计研究[J].中国农村水利水电,2004,(8):1-3.
[3] 张育斌,魏正英,马胜利,等.极端天气下作物参照蒸散量计算方法研究[J].中国农村水利水电,2014,(12):64-71.
[4] 陈 浩,苏宏升.基于卡尔曼滤波和小波神经网络的短时交通流预测研究[D].兰州:兰州交通大学,2011.
[5] 尼加提·努尔买买提,杨慧中,陶洪峰,等.卡尔曼滤波器在软测量建模数据处理中的应用[J].化工自动化及仪表,2013,40(5):602-605.
[6] 仓文涛,杨慧中.无迹卡尔曼滤波器在催化剂失活软测量建模中的应用[J].计算机与应用化学,2013,30(2):1397-1400.
[7] 赵 攀,戴义平,夏俊荣,等.卡尔曼滤波修正的风电场短期功率预测模型[J].西安交通大学学报,2011,45(5):47-51.
[8] 彭丁聪.卡尔曼滤波的基本原理及应用[J].软件导刊,2009,8(11):32-34.
[9] 石曼曼,余建立.基于卡尔曼滤波的短时交通流预测方法研究[D].成都:西南交通大学,2012.
AstudyonthemodifiedANFISmodelbytheCalmanfilterforET0prediction
LI Zhi-lei1, ZHOU Jian-ping1, WEI Zheng-ying2, ZHANG Yu-bin2, XU Yan1
(1.MechanicalEngineeringCollegeofXinjiangUniversity,Urumqi,Xingjiang830000,China; 2.StateKeyLaboratoryofMechanicalManufacturingSystemEngineering,Xi'anJiaotongUniversity,Xi'an,Shaanxi710049,China)
Real time and accurate prediction for water demand by crop is the key technology to realize intelligent water-saving irrigation. The reasonable selection of forecasting model and the improvement of accuracy is the key to the decision-making system on water demand. This article introduced the meteorological data on environmental information in Xi'an of Shaanxi province to the forecast model of self adaptive neural fuzzy inference (ANFIS) reference crop transpiration (ET0). The calman filter was used to filter the noise of theET0value obtained by the ANFIS model to improve the forecasting accuracy of the model, thus improving the forecasting accuracy of model and verifying the accuracy of the model through simulation and experiment. The simulation results showed that the equal coefficient(EC) reflecting the fitting degree between the real value and the result of forecasting model was 0.93 and 0.98 after being adjusted. The results from experiment showed that the ANFIS forecast model's mean absolute error was 28.94%, and the average relative error was 26.37%. After modification, the mean absolute error was 7.24%, and the average relative error was 6.59%. Simulation and experimental results indicated that the prediction model of ANFIS was modified by using calman filter, which could improve the accuracy of prediction. The revised ANFIS model by the calman had better reflection of the change trend ofET0.
reference crop evapotranspiration; Penman-Monteith formula; ANFIS model; Calman filter; prediction accuracy
1000-7601(2017)03-0114-06doi:10.7606/j.issn.1000-7601.2017.03.18
2016-01-20
:2017-05-10
:新疆维吾尔自治区高技术研究发展项目“干旱区智能控制微灌技术与设备”(201413102)
李志磊(1990—),女,河南鹤壁市人,硕士研究生,研究方向为作物节水灌溉。E-mail:1129091974@qq.com
S27; TP312
: A
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
Journal of Palaeogeography(2022年1期)2022-03-25
快乐语文(2021年35期)2022-01-18
今日农业(2021年19期)2022-01-12
环境保护与循环经济(2021年7期)2021-11-02
电子产品世界(2021年6期)2021-02-10
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
摄影之友(影像视觉)(2017年1期)2017-07-18
中国惯性技术学报(2017年1期)2017-06-09
