GNSS载波相位测量的DGNSS模型── GNSS卫星导航定位方法之八
2017-07-18 12:01刘基余
数字通信世界 2017年6期
刘基余
(武汉大学测绘学院,武汉 430079)
GNSS载波相位测量的DGNSS模型── GNSS卫星导航定位方法之八
刘基余
(武汉大学测绘学院,武汉 430079)
差分GNSS载波相位测量,是一种能够获取高精度的卫星导航定位方法,它分为单差法、双差法和三差法,本文论证了它们的数学模型。
差分GNSS(DGNSS);GNSS载波相位测量;GNSS信号接收机;单差法;双差法;三差法
1 引言
差分GNSS载波相位测量,是一种能够获取高精度的卫星导航定位方法,它分为单差法、双差法和三差法。
2 差分GNSS(DGNSS)载波相位测量
在作差分GNSS(DGNSS)载波相位测量时,假定两台GNSS信号接收机,分别安设在两个不同的测站R和K上,而于两个不同的时元t1和t2,各观测了两颗GNSS卫星(j和n;实际上至少要观测4颗GNSS卫星,此处仅仅为论述简便起见而用之。),则可测得下列8个L1载波相位观测值:

它们分别为(下述式中符号的意义请参阅“GNSS载波相位测量── GNSS卫星导航定位方法之六”一文,《数字通信世界》,2017年第2期,P.1~6):
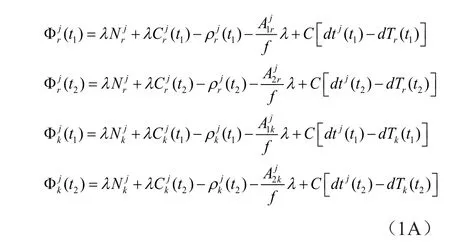

图1 DGNSS动态载波相位测量

依据上列8个L1载波相位观测值,可以组成下列三种差分测量值:
2.1 四个单差分测量值
图2表示在测站之间进行求差解算。依据上列8个L1载波相位测量观测值,可以求得如下所述的单差分测量值。


图2 站际单差分测量示意
从上列方程可见,单差法,是两台分别安设在两个测站上的GNSS信号接收机(K,R),于同一时元对同一颗GNSS卫星的载波相位测量进行求差;这种在两台接收机之间进行载波相位测量求差解算,简称为“站际单差”。也可在两颗GNSPS卫星之间进行载波相位测量求差解算,称之为“星际单差”。站际单差的优点是,消除了星钟误差和星历误差。
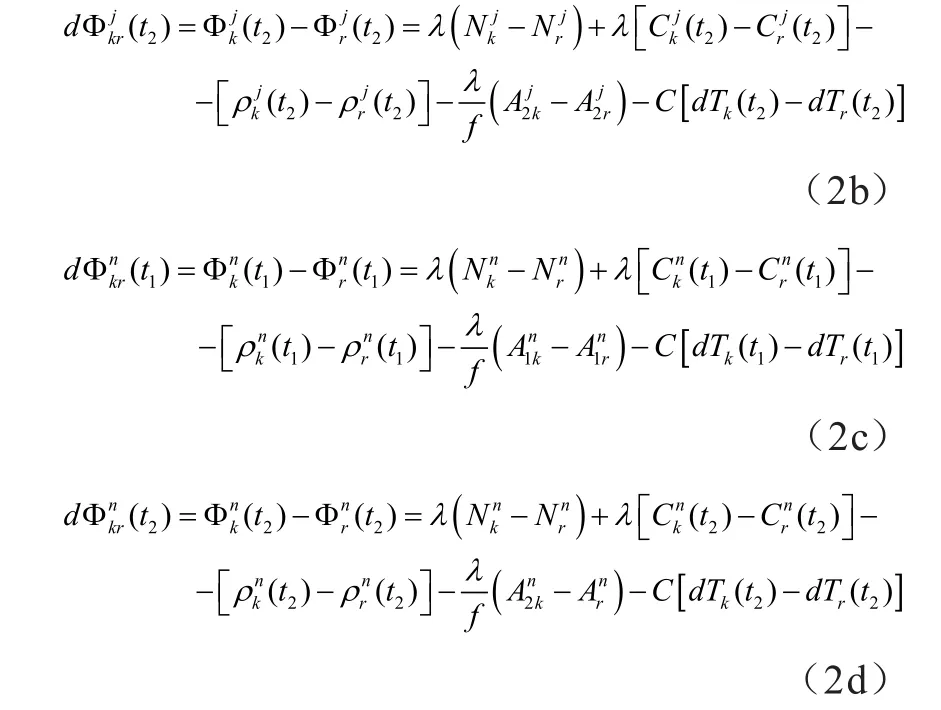
2.2 二个双差分测量值

图3 双差分测量示意
图3表示在测站和卫星之间进行求差解算。依据上列8个L1载波相位测量观测值,可以求得如下所述的双差分测量值。
从上列方程可见,双差法是两台分别安设在两个测站上的GNSS信号接收机(K,R),于同一时元对两颗不同的GNSS卫星的载波相位测量进行求差,即,双差法是同一时元的两个单差测量值之差。其优点是,除了消除了星钟误差和星历误差以外,还消除了两台GNSS信号接收机的星钟误差。因此,双差法能够显著地提高GNSS卫星导航定位精度,而被广泛应用之。
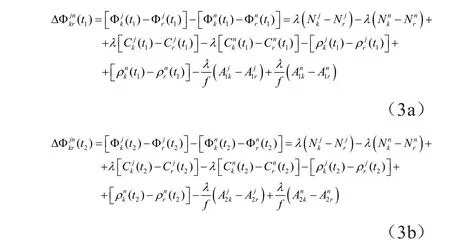
2.3 一个三差分测量值
图4表示在测站、卫星和时元之间进行求差解算。依据上列8个L1载波相位测量观测值,可以求得如下所述的三差分测量值。

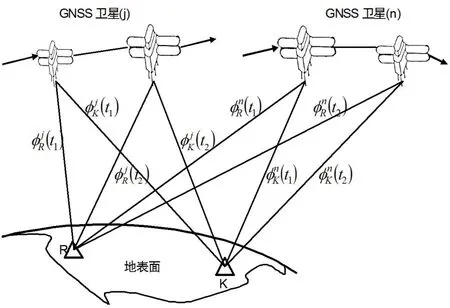
图4 三差分测量示意
从上列方程可见,三差法是两台分别安设在两个测站上的GNSS信号接收机(K,R),于不同的时元(t1,t2)对两颗不同的GNSS卫星(j,n)的载波相位测量进行求差。即,三差法是不同时元、不同卫星的两个双差测量值之差。其优点是,不仅消除了星钟误差、星历误差和GNSS信号接收机钟差,而且消除了波数(整周模糊度;如表1所示)。
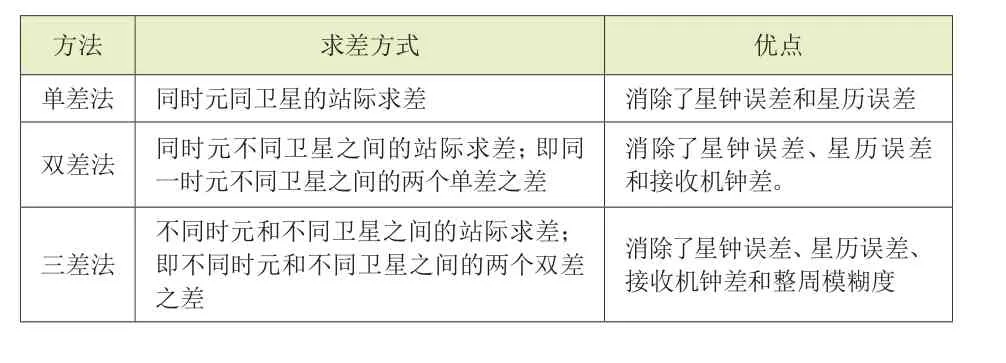
表1 DGNSS测量的优越性
GNSS载波相位测量的三差法,还可用于周跳的修除。例如,若在观测GNSS卫星j和n时,仅对GNSS卫星j作载波相位测量时,测站K上发生了周跳(CS),而获得了如表2所示的载波相位测量观测值。仅以这5个时元的载波相位测量观测值而求得如表3的单差、双差和三差等三种差分测量值。
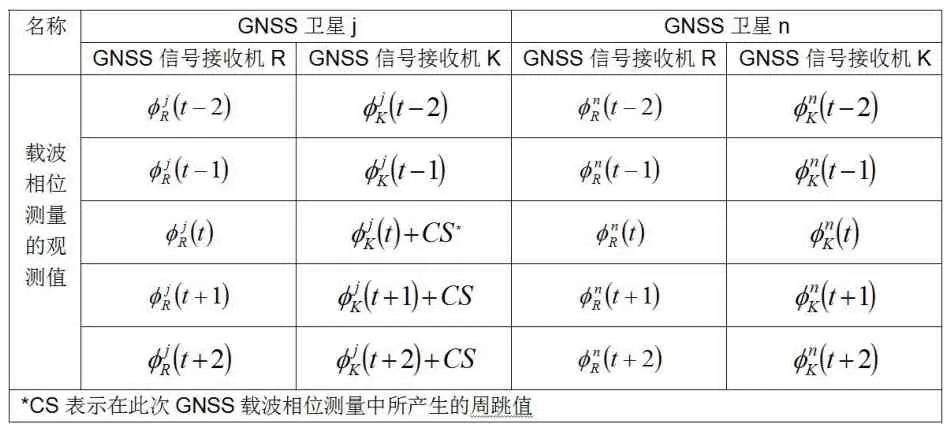
表2 两颗卫星(j,n)的载波相位测量观测值

表3 单差、双差和三差差分测量值
从表3可见,在5个双差测量值中,有3个双差测量值存在周跳;而在4个三差测量值中,只有一个三差测量值存在周跳。因此,我们可以利用无周跳的三差测量值,精确地解算出基线向量,进而修除周跳,再作整体解算。
在上述求差解算时,一般选用一颗高度角较大的GNSS卫星作为求差的参考卫星,进而用其他3颗以上GNSS卫星的载波相位测量观测值,与参考GNSS卫星的载波相位测量观测值进行求差,而获得所需要的差分测量值。不管是GNSS静态定位,还是GNSS动态测量,载波相位测量观测值的求差解算,均能够获得较高的导航定位精度;现以GPS为例,说明能够获精度增益如表4所示。

表4 DGPS动态定位精度
着陆是飞机安全飞行的关口阶段,它包括起始进场、下滑和拉平三个过程,每一个过程要求不同的二维位置/垂直精度。根据国际民用航空组织(ICAO)于1998年8月对GNSS用于进近着陆的建议标准为:
⊙ I类精密进近的二维位置/垂直精度是16.0m/4.0m。
⊙ I I类精密进近的二维位置/垂直精度是6.5m/1.7m。
⊙ III类精密进近的二维位置/垂直精度是3.9m/0.8m。
这与V.Sankaran和D.Benson两位学者所推荐的精度要求相符合,其详情如表5所示。
从以上表格可见,用机载GPS载波相位测量平滑DGPS伪距解,基本上可以达到飞机的III类精密进近着陆的精度要求;若用GNSS动态载波相位测量求差解算,则可确保飞机的III类精密进近着陆的精度要求。
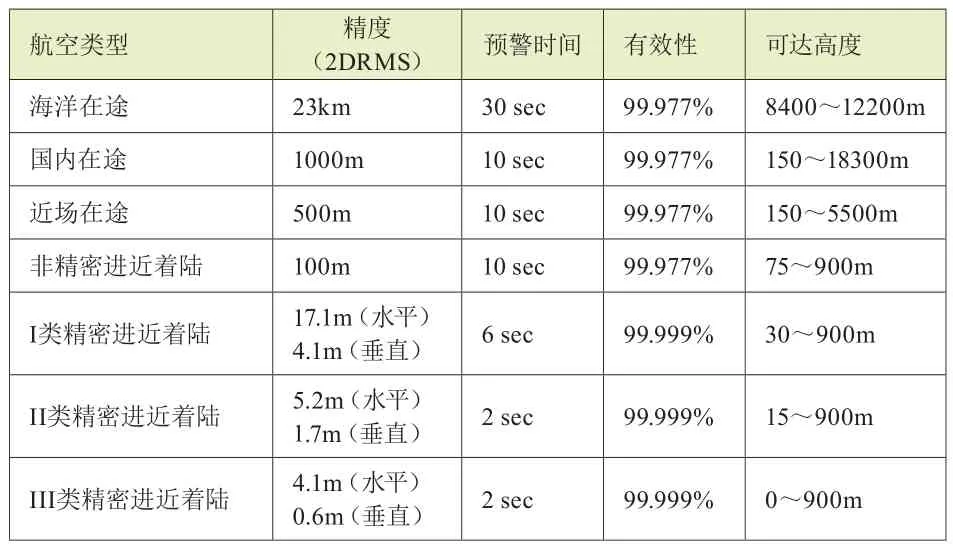
表5 航空导航/定位的要求精度
3 组合测量与GNSS测量
2008年初春,在加拿大的GPS/GLONASS/ EGNOS组合观测的试验表明,对于几米长的短基线而言,相对定位测量的单一GPS伪距/载波相位测量解算的三维坐标误差,大于GPS/GLONASS/ EGNOS组合伪距/载波相位测量解算的三维坐标误差;然而,GPS/GLONASS/EGNOS组合伪距/载波相位测量解算的三维坐标误差与GPS/GLONASS组合伪距/载波相位测量解算的三维坐标误差相差甚小(详见表6所示)。换言之,GNSS测量精度,是否比双星座(如GPS/GLONASS)组合测量精度高许多,有待验证之!

表6 GPS/GLONASS/EGNOS组合在6m基线上的伪距/载波相位测量解算成果比较
载波相位差分测量的基准站设置和DGNSS数据链等问题,请参阅“GNSS伪距差分定位及其特色── GNSS卫星导航定位方法之二”一文(《数字通信世界》,2016年第8期,P.1~6)
[1] 刘基余,全球导航卫星系统及其应用,北京测绘出版社,2015年5月
[2] Lachapelle,G., GPS Theory and Applications, University of Calgary, Fall 2000, PP.310
DGNSS Model of GNSS Carrier Phase Measurements --Method of GNSS Navigation/Positioning (8)
Liu Jiyu
(School of Geodesy and Geomatics, Wuhan University, Wuhan, 430079)
GNSS carrier phase differential measurements are a kind of satellite navigation/positioning method which can obtain high navigation/positioning accuracy. It can be divided into single differential method, double differential method and three differential method. In this paper their mathematical models are demonstrated.
Differential GNSS; GNSS carrier phase differential measurements; GNSS signal receiver; Single differential method; Double differential method; Three differential method
10.3969/J.ISSN.1672-7274.2017.06.001
TN96
A
1672-7274(2017)06-0001-04
刘基余,现任武汉大学测绘学院教授/博士生导师,兼任美国纽约科学院(New York Academy of Sciences)外籍院士、中国电子学会会士。主要研究方向是GNSS卫星导航定位/卫星激光测距技术,在国内外30余种中英文学术期刊上发表了280余篇相关研究论文,独著了(北京)科学出版社于2013年1月出版发行的《GPS卫星导航定位原理与方法》一书。他的主要业绩已分别载于美国于2001年出版发行的《世界名人录》(Who's Who in the World)、美国于2005年出版发行的《科技名人录》(Who's Who in Science and Engineering)和中国科学技术协会于2007年出版发行的《中国科学技术专家传略》工程技术编《电子信息科学技术卷2》等50多种国内外辞书上。
猜你喜欢
地理空间信息(2022年11期)2022-11-26
河北理科教学研究(2021年3期)2022-01-18
测绘学报(2018年10期)2018-10-26
中国交通信息化(2018年6期)2018-08-29
城市勘测(2018年1期)2018-03-15
测绘科学与工程(2017年3期)2017-08-16
中学物理·高中(2016年12期)2017-04-22
测绘通报(2016年12期)2017-01-06
新高考·高二数学(2015年11期)2015-12-23
导航定位学报(2015年2期)2015-06-05