
基于Solidworks motion的凸轮运动仿真
2017-07-14 07:53首云飞
商情 2017年18期
关键词:凸轮
首云飞

摘要:本文利用Solidworks的motion运动仿真功能,完成了模切机清废上框动力凸轮机构的运动仿真分析,得到运动从动件相应的线位移、速度、加速度、以及凸轮滚子和凸轮之间接触力等运动曲线图。从而可以快速、准确、直观的分析判断凸轮廓线曲线的性能。
关键词:模切机 凸轮 Solidworks;Motion运动仿真 运动曲线
0引言
凸轮摆杆机构是一种很典型的常用机构,被大量使用在各种轻工设备上。例如印后模切设备中平压清废模切机的清废机构,就是该机构应用的一个典型案例。
清废模切机是一种自动化程度很高的印后设备之一。模切机的清废机构是影响清废效果和效率的关键机构。该机构是由一套凸轮连杆驱动,凸轮曲线设计的好坏将直接影响设备运行的速度和精度。本文将以该机构中清废上框凸轮机构的结构模型做为研究对象,进行运动仿真分析。
随着计算辅助设计功能的不断完善,工程技术人员也越来越多采用三维计算机设计软件进行结构设计和性能分析。本文所分析的凸轮机构就是基于Solidworks为建模基础,完成虚拟的装配,并应用Motion分析软件进行运动仿真分析,得到各运动构件的性能曲线图解。能够快速帮助设计人员提供直观、准确的分析结果,以判断原凸轮机构设计的优劣。
1仿真模型
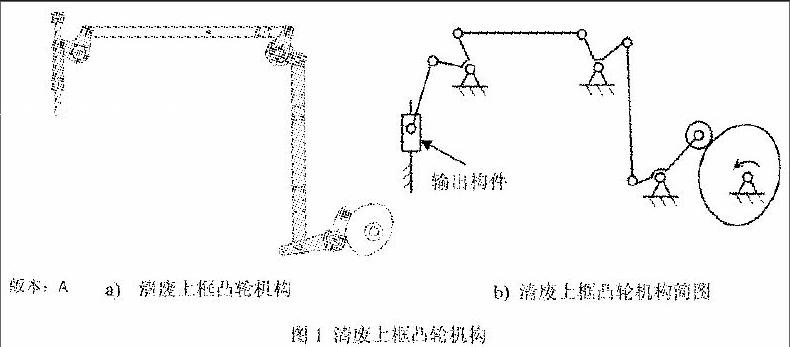
模切机清废上框凸轮机构如图1所示,该机构由摆动从动件盘形凸轮机构、四连杆机构、曲柄滑块机构等组成。
该机构采用串联组合的结构组成形式。其中,摆动从动件盘形凸轮机构为输入构件,两个四连杆机构实现运动的传递,曲柄滑块机构作为输出机构,由滑块带动负载实现预期的运动规律。
2分析目的
利用SolidWorks中Motion插件对该机构的凸轮机构进行运动仿真,得到该机构各构件的运动性能曲线,如位移、速度及加速度曲线等,进而得到凸轮曲线的动态性能指标,判断凸轮曲线设计的优劣;
在运动分析中加载和实际负载相同的力,通过运动分析。得出一个运动周期内凸轮与滚子间的接触力变化规律,根据凸轮滚子受力的性能指标,判断凸轮曲线的优劣及反向验证凸轮滚子的选型是否合理;
3分析步骤及方法
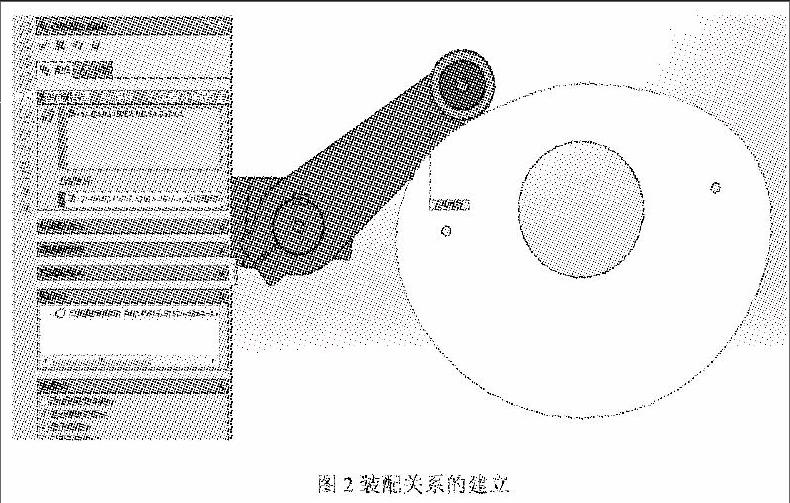
在Solidworks中建立一个凸轮机构的实体模型,定义机架零件为静止零件、分别在凸轮与滚子、各连杆构件间添加凸轮运动副及同心配合。装配关系定义完成后,手动转动凸轮检查各连杆及各输出件运动位置,确保能够正常运转。单击菜单“工具”——“插件”——“Solidworks motion”启动motion仿真插件,并建立一个新的“运动算例”进入仿真模式。
设置“运动算例”相关参数。如图3、图4所示,在输出构件上增加一个与清废框的质量相同的重物(初定1500N),并在模型全局施加沿Y轴负向的引力,以模拟连杆的重力;
在凸轮上添加旋转马达,并按照实际工况设置转速(按120RPM),完成运动仿真模型的建立,如图5。
设置好以上参数后,运行该运动算例。可以播放出该机构的运动画面,通过motion仿真可得到凸轮机构中各构件的运动规律在一个分度周期内的变化规律。可通过如图6对话框,选择需要分析构件输出结构类型,生成相应的图解。
4运动仿真结果的应用和分析
A:通过motion中图解选项可绘制出输出构件的运动规律曲线,如图7所示。由此可作为判断凸轮曲线的优劣的依据。
由仿真结果可知,该凸轮机构中,凸轮为单停歇凸轮。比较输出构件位移、速度、加速度曲线与可以得出:该凸轮曲线在推称和回程阶段均采用了摆线运动规律。速度、加速度曲线较光滑无冲击,能够满足中速凸轮机构中的要求。
但是当推程以及回程均采用摆线运动规律时,其加速度曲线在推程极值位置出现不连续情况,且跃度会有较大的突变(如图8所示跃度变化曲线),使得从动件惯性力产生突变,在高速运行时会引起机构振动。所以该凸轮机构若要在适应更高速度的要求,为避免震动就需要采用凸轮整个运动周期加速度均连续的运动规律。
B:通过motion中图解选项还可绘制出滚子与凸轮间作用力随时间变化曲线,如图9所示。由此可作为判断凸轮滚子选型是否合适的依据。
如下图示:当负载为1500N,转速为120RPM时。滚子和凸轮之间的最大接触力为5826N,同时可求出滚子接触力的平均值。据此可判断出所选凸轮滚使用寿命是否足够。
5结束语
本文利用Solidworks的“motion”运动仿真功能,完成了模切机清废上框动力凸轮机构的运动仿真分析,得到运动从动件相应的线位移、速度、加速度、跃度、以及凸轮滚子和凸轮之间接触力曲线图。可以很直观的得知所设计凸轮的性能,以及反向验证凸轮滚子选型是否满足需求。可以快速判断凸轮机构设计的好坏,大大降低研发成本;同时为进一步优化凸轮曲线提供了明确的方向和理论依据。
参考文献:
[1]陈超祥,胡其登.Motion运动仿真教程..机械工业出版社.
[2]张军,李宪华.基于COSMOSMotion的凸輪-推杆仿真[J].煤矿机械,2006(9):103-105.
[3]孙恒,陈作模.机械原理.高等教育出版社.
猜你喜欢
丝绸(2022年6期)2022-06-22
商情(2019年2期)2019-03-20
科技视界(2018年21期)2018-12-10
文艺生活·中旬刊(2017年4期)2017-05-25
建筑工程技术与设计(2015年26期)2015-10-21
中小企业管理与科技·中旬刊(2014年8期)2014-09-22
