基于发动机协调控制的AMT换挡策略研究
2017-07-12 15:11黄冈
价值工程 2017年19期
黄冈
摘要: 为了改善电控机械式自动变速器(AMT)的换挡品质,分析了换挡过程理想状态下发动机转速、转矩变化的特性曲线,制订了基于CAN总线的换挡过程发动机协调控制策略。提出在换挡过程中,发动机减载和加载阶段通过变速箱干预转矩对发动机输出转矩进行短时的协调控制,空载阶段采用转速闭环PID控制的发动机协调控制策略。为验证该策略的有效性,基于MATLAB/Simulink软件平台搭建了仿真模型,以升档为例,对提出的控制策略进行了仿真验证。仿真结果表明,所提出的发动机协调控制策略能够满足实时性要求,减小离合器滑磨,有助于提高AMT的换挡品质。
Abstract: In order to improve the shift quality of the automated mechanical transmission(AMT), the ideal speed and torque curves of engine during gear shifting process was analyzed. And a CAN bus-based engine coordinated control strategy for gear shifting is worked out. In this paper, an engine coordinated control strategy was introduced for gear shifting process while load and unload conditions were discussed respectively. To be specific, engine torque output was temporarily controlled by transmission coordinated torque during engine loading and shedding process and PID loop control of speeds was applied in the no-load time. The validity of the presented strategy is demonstrated by simulation based on MATLAB/Simulink, which focused on upshift progress. The results show that the proposed strategy could meet real-time requirements, reduce clutch slipping and improve the shift quality of AMT.
关键词: AMT;CAN总线;变速箱干预转矩;协调控制;PID
Key words: AMT;CAN bus;transmission coordinated torque;coordinated control;PID
中图分类号:U463.212 文献标识码:A 文章编号:1006-4311(2017)19-0100-04
0 引言
电控机械式自动变速器(AMT)是在传统的有级式手动齿轮式变速器基础上加装自动换挡机构改进而来的,具有操作方便、制造成本低、传动效率高等优点。由于AMT是有级式变速器,因此,在换挡过程中存在传动比的突变,从而引起换挡冲击,降低了驾乘的舒适性和换挡平顺性[1],所以在AMT换挡过程中需要对发动机和离合器进行协调控制。
在此前的研究中,關于换挡过程的发动机协调控制有一定的相关研究。文献[2][3]通过调节节气门开度来调节发动机转速,以改善换挡品质,这种方式是一种慢转矩调节方式,对于有限的换挡时间来说显然达不到期望的控制精度和响应速度;文献[4]对发动机开展了开环断油控制,文献[5]开展了模糊控制,文献[6]开展了自适应算法控制,但是这几种方式只对发动机的转速进行控制,不能对发动机的输出转矩进行干预,容易在换挡过程中产生转矩突变。随着技术的进步,基于CAN的ECU转矩和转速控制技术不断完善,通讯协议逐渐开放,现代发动机控制系统允许根据传动系的转矩需求对发动机进行短时的转矩控制[6,7]。在此基础上,文中提出一种ECU通过CAN总线传递来的一组TCU换挡请求信号,根据发动机所处的不同换挡阶段采取转矩、转速控制相结合的发动机协调控制策略,可明显提高发动机协调控制精度与响应速度,并改善了AMT换挡品质。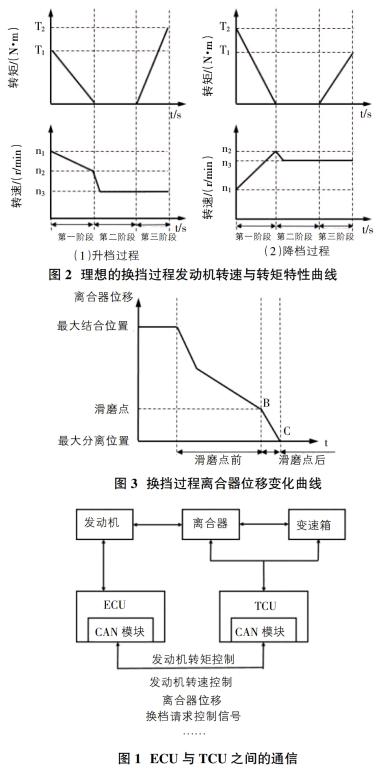
1 换挡品质的评价指标
换挡品质评价指标很多,对于AMT车辆换挡过程的基本要求是:换挡过程应尽量迅速完成,以减少离合器的磨损,减小换挡期间因动力中断所引起的速度损失,换挡过程应尽量平稳地过度,以提高换挡平稳性,根据这一要求,采用冲击度j和滑磨功W作为评价指标。
1.1 冲击度
式中:Tc为离合器传递的转矩,ωe为发动机角速度,ωc为离合器从动盘角速度,t0为离合器从开始滑磨到主、从动摩擦片转速完全同步所用时间。
从式(2)可以看出摩擦功主要与滑磨时间,离合器传递的转矩以及发动机角速度和离合器从动盘角速度差Δω=ωe-ωc相关。因此,在换挡过程中迅速调节发动机转速至目标转速,减小速度差Δω,可以有效地减少滑磨时间和滑磨功[9]。
2 AMT换挡过程发动机控制策略分析
2.1 换挡过程协调控制原理
AMT汽车换挡过程中,实现发动机转矩、转速与离合器协调控制的基本条件是通过CAN总线使ECU与TCU之间进行通信。在换挡过程中,当达到换挡条件后,TCU根据车辆的行驶工况通过CAN总线向ECU发出换挡请求控制信号、目标转速、离合器位移等信号,ECU接收到TCU的指令后,允许变速箱干预转矩对发动机转矩进行短时的协调控制,同时,ECU将发动机的转速、转矩信号实时传递给TCU。TCU接收到发动机转速、转矩的信息后,根据离合器转矩传递规律,对离合器结合速率进行控制并执行自动换挡操作。图1是换挡过程中TCU和ECU之间相互协调控制的示意图。endprint
2.2 换挡过程发动机协调控制目标
变速箱换挡过程中,无论是升档还是降挡,发动机都要经历减载、空载、加载3个阶段。理想的换挡过程发动机转速与转矩特性由图2所示。
第一阶段:减载。当达到换挡条件后,TCU会控制离合器主、从动盘进行分离。离合器分离阶段控制目标是发动机转速平稳,减小发动机的输出转矩,TCU控制离合器在尽量短的时间内分离,保证车辆不能出现明显的减速冲击,防止出现发动机转速突然上升或发动机倒拖现象。
第二阶段:空载。离合器完全分离后,由TCU执行选挡,挂挡操作。此时,发动机处于空载状态,如果不对发动机的输出转速进行控制,将会造成飞车现象。空载阶段,发动机需要根据TCU传递的新档位下目标转速进行调速,使发动机转速达到新档位下的目标转速,这样能够减少离合器在结合时的滑磨功,加速离合器主、从动盘同步,减少换挡时间。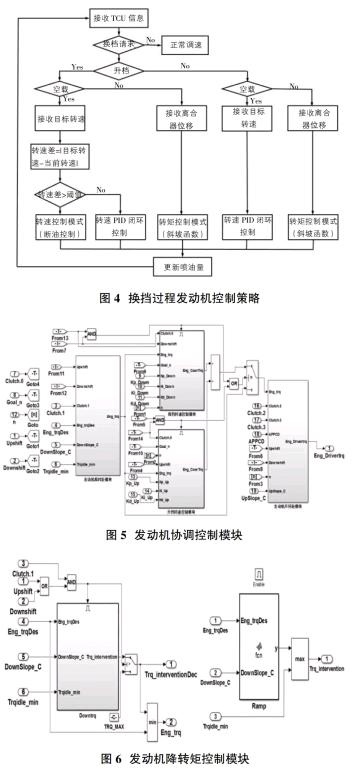
第三阶段:加载。选、挂挡完成后,离合器的主、从动盘开始结合。加载阶段,发动机需要逐渐增加发动机输出转矩,保持新档位下的转速平稳。当离合器主、从动盘转速同步后,发动机的输出转矩应迅速恢复到驾驶员的需求转矩。
2.3 换挡过程发动机协调控制策略
根据上面对换挡过程中发动机的特性分析可知,ECU协调控制发动机的输出转矩和转速需要根据TCU传递过来的离合器位移信号来判断发动机处于哪一阶段,在不同阶段采取转矩控制或转速控制模式。在以往对离合器控制规律的研究中,离合器的分离或结合的过程通常分为快-慢-快3个阶段[10]。本文根据发动机协调控制策略的需要,将离合器的位移变化情况分为滑磨点(离合器刚好能够传递转矩的点,图3中B点)前、后两种状态。当离合器位移处于滑磨点前时,发动机与传动系统处于接合状态;当离合器位移处于滑磨点后时,发动机与传动系统处于断开状态。如图3所示。
基于CAN总线的AMT换挡过程发动机协调控制策略如图4所示。发动机ECU根据TCU传递得来的信息,首先判断是否处于换挡阶段,接着判断是升档协调控制请求还是降挡协调控制请求,然后根据发动机所处的不同换挡阶段,采取不同的协调控制策略。各阶段具体控制策略如下:
①在换挡过程中,当离合器位移处于滑磨点前时,发动机可能处于第一或第三阶段,即减载或加载过程。
1)减载过程发动机采用转矩协调控制模式。此时变速箱渐减干预转矩开始采用斜坡函数Ramp减少,同时对发动机的目标转矩进行取小限制,使发动机输出转矩逐渐减小,转矩斜坡减小的下限值为维持发动机怠速所需要的最小值。当换挡结束后,变速箱渐减干预转矩阶跃为一个最大值,停止对发动机转矩的干预。
2)加载过程发动机同样采用转矩协调控制模式。与减载过程不同的是,此时变速箱渐增干预转矩采用斜坡函数Ramp增加,同时对发动机的目标转矩进行取大限制,使发动机输出转矩逐渐增加,转矩斜坡增加的上限值为换挡结束后驾驶员需求转矩。当检测到离合器主、从动盘的转速同步后,变速箱渐增干预转矩阶跃到当前油门开度下驾驶员需求转矩,迅速恢复车辆的动力需求。换挡结束后,变速箱渐增干预转矩阶跃为一个最小值,停止对发动机转矩的干预。
②在换挡过程中,当离合器位移处于滑磨点后时,发动机处于第二阶段,即空载过程。
空载时,发动机协调控制采用转速控制模式。转速的调节通常有两种方式,一种方式为通过调节油泵齿条位置改变供油量来调节转速;另一种方式为通过协调控制发动机的目标转矩,间接达到调节转速的目的。虽然两种方式本质上都是对供油量的改变来调节转速,但随着基于转矩的发动机控制算法的发展以及共轨技术的广泛应用[11],第二种方式更加方便整车电控单元的集成,因此,文中采用第二种方式对转速进行调节。转速控制过程为:发动机ECU通过CAN总线接收到TCU传递过来的新档位下发动机的目标转速后,根据不同的换挡要求,选择不同的转速控制策略,自动实现转速的闭环调节。目标转速的计算规则(假设换挡过程车速保持不变):n1=·n0(3)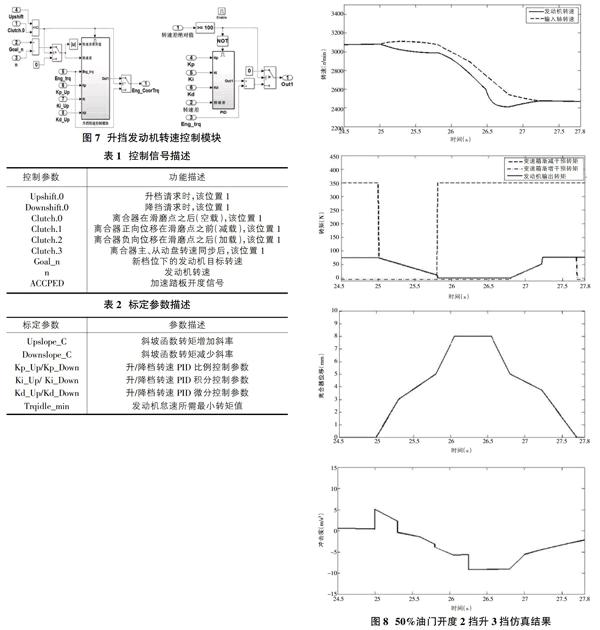
式中:n1为发动机转速控制的目标转速;n0为离合器分离时的输出轴的转速;ig0为换档后的变速箱传动比;ig1为换挡前的变速箱传动比。
1)升档(空载)时,需要降低发动机转速到新档位下的目标转速。为了减少换挡时间,迅速降低发动机转速,当转速差>阈值时,发动机采取断油控制(令发动机目标转矩阶跃为0);当转速差<阈值时,发动机采用转速PID闭环控制,使转速能够跟随目标转速。
2)降挡(空载)时,需要增加发动机转速到新档位下的目标转速。此时,发动机只需采用转速PID闭环控制,将发动机转速迅速调节到目标转速。
3 建模与仿真结果分析
3.1 发动机协调控制策略建模
基于上节分析,以Simulink为建模工具,对AMT换挡时发动机协调控制策略进行建模。模型主要包括发动机降转矩模块,升档转速控制模块,降挡转速控制模块,发动机升转矩模块。
图5为换挡时发动机协调控制策略总模块,图6、图7分别为总模块图中的发动机降转矩模块,升挡时发动机的转速调节模块;表1、表2分别为控制策略中的控制信号与标定量。
3.2 仿真结果分析
将上述的换挡时发动机协调控制策略模型與项目组前期开发的整车模型进行联合仿真。整车的仿真模型包含发动机模型,离合器模型以及车辆动力学模型。当油门开度为50%时,2挡升3挡的仿真结果如图8所示。从图中的仿真结果可见离合器的位移变化规律满足“快—慢—快”的控制规律。由转速、转矩图可知,在升档减载过程,发动机的转速逐渐下降,发动机的输出转矩在变速箱渐减干预转矩的限制下,按照斜坡函数控制规律下降;空载阶段,发动机的目标转矩为0(断油控制),发动机的转速快速下降到2600r/min,随后平稳下降致目标转速2430r/min附近;加载阶段,输入轴转速与发动机转速已经非常接近,发动机输出转矩在变速箱渐增干预转矩限制下逐渐上升,发动机转速也逐渐与输入轴转速开始同步,当转速同步后,发动机转矩迅速恢复到驾驶员需求转矩,变速箱的干预转矩停止对发动机转矩的干预控制。整个换挡过程时间在3秒之内,冲击度j<10m/s3,满足换挡冲击度推荐值的要求,说明整个换挡过程快速流畅、动力性好、滑磨功小,验证了换挡时发动机协调控制策略的正确性与有效性。endprint
4 结论
文章通过分析在AMT换挡过程中,发动机转速和转矩变化的特性曲线,将换挡过程划分为3个阶段。针对不同阶段,对发动机分别采用转速控制或转矩控制模式,并得出以下结论:①换挡过程中,在发动机减载、加载阶段,通过变速箱干预转矩,采用Ramp函数对发动机的输出转矩进行转矩控制,能够有效地减小换挡过程中发动机转矩突变。②发动机空载阶段采用的转速闭环PID控制与断油控制相结合的转速控制策略,能够快速地将发动机转速调节至目标转速,有助于减小滑磨功。③针对AMT换挡过程提出的基于CAN总线的转矩与转速结合的发动机协调控制策略满足换挡过程的控制需求,提升了换挡舒适性,并改善了AMT汽車的换挡品质。
参考文献:
[1]吴光强,孙贤安.汽车自动变速箱发展综述[J].同济大学学报:自然科学版,2010,38(10):1478-1483.
[2]阴晓峰,谭晶星. AMT换挡过程发动机转速Fuzzy-Bang-Bang双模态控制[J].机械工程学报,2004,40(2):157-160.
[3]王云成,施国标,唐志东,等. 模糊控制在AMT系统发动机转速控制中的应用[J].内燃机工程,2000(2):11-16.
[4]何忠波,白鸿柏,李东伟,等.发动机断油控制改善AMT换挡品质实验研究[J].农业机械学报,2005,36(10):16-19.
[5]马景龙,刘振军,秦大同,等. 重型AMT汽车发动机转速控制[J].内燃机,2007(4):21-23.
[6]Roy S R, Malik O P, Hope G S. An adaptive control scheme for speed control of diesel driven power-plants [J]. Energy Conversion, IEEE Transactions on, 1991, 6(4): 605-611.
[7]孔国玲,钟再敏,余卓平,等. AMT离合器不分离换挡过程中发动机控制[J].同济大学学报:自然科学版,2012,40(2):267-270.
[8]黄英,万国强,崔涛,等.AMT换挡过程发动机控制策略研究[J].汽车工程,2012,34(3):245-247.
[9]赵璐.商用车AMT控制策略及实验研究[D].长春:吉林大学汽车工程学院,2012:47-49.
[10]Nordgard K, Hoonhorst H. Developments in automated clutch management systems[R]. SAE Technical Paper, 1995.
[11]谢先平,梅近仁,李君,等.基于发动机联合控制的AMT换挡控制策略[J].汽车技术,2012,42(6):29-30.
[12]Satou S, Nakagawa S, Kakuya H, et al. An accurate torque-based engine control by learning correlation between torque and throttle position[R]. SAE Technical Paper, 2008.endprint
猜你喜欢
自动化学报(2017年4期)2017-06-15
现代电子技术(2016年22期)2016-12-26
电网与清洁能源(2015年2期)2015-02-28
电测与仪表(2014年22期)2014-04-04
电力工程技术(2012年5期)2012-03-25