
基于MATLAB的齿轮箱加速度信号模糊识别传感器系统分析设计
2017-07-12 16:06李俊伟房建东
电子设计工程 2017年12期
李俊伟,房建东
(内蒙古工业大学 信息工程学院,内蒙古 呼和浩特010080)
基于MATLAB的齿轮箱加速度信号模糊识别传感器系统分析设计
李俊伟,房建东
(内蒙古工业大学 信息工程学院,内蒙古 呼和浩特010080)
以齿轮箱加速度传感器系统为研究对象,设计模糊智能辨识系统,对加速度进行模糊化,构建模糊规则,输出拟人类语言值。基于MATLAB软件平台,建立模糊控制规则并进行仿真研究,仿真结果验证了模糊传感器设计的合理性,具有实际指导意义。
齿轮箱;传感器;加速度;振动
变速箱广泛应用于各种工业设备中,是旋转机械和状态监测领域的核心部件[1]。变速箱是机械设备中最常见和最容易损坏的部分,以风力发电机为例,据统计,齿轮箱故障率已超过60%[2]。振动作为一种载体,反映了齿轮箱的运行状态,它包含了丰富的机械设备故障信息。振动特性可以反映机械设备运行状态的特点,为了判断齿轮的运行状态,分析齿轮振动信号是齿轮故障诊断最有效、最常用的方法[3,4]。
传统的齿轮箱振动信号检测主要依靠人工经验,随着计算机技术的快速发展,对齿轮箱的振动检测已进入新的阶段,但这些技术仍然离不开人工经验,依靠专业的人来做一个数据的实时分析,从而形成一个知识库,但不利于知识库的扩展。这一缺点带来了许多错误的振动检测结果[5-7]。振动检测方法是多种多样的,频谱分析是众多方法之一,观察齿轮振动信号的频谱结构,有效地对齿轮故障的频谱进行分析。然而,边频带的具体特征不易获得,容易得出错误的诊断结果[8,9]。传统振动检测技术中存在诸多不利因素,其应用有限。
设计提出了一种齿轮箱加速度信号模糊识别智能传感器系统。变速箱的结构和工作环境对传感器的影响不大,降低了检测和安装的难度,也有很大的适应性。模糊传感器具有良好的鲁棒性和灵活性,加速度被识别为相应的人类语言值,实现齿轮箱振动信息的智能检测,获得齿轮箱的运行状态和可能的故障,做到预测,估计和判断,它可以为变速箱的更换和维修提供决策依据,因此本文的研究具有重要的现实意义。
1 模糊传感器设计
1.1 模糊传感器
模糊算法不需要具体的数学模型,算法实现方便,易于工程实践并且鲁棒性很好[10]。模糊识别传感器是基于传统的参数测量和模糊理论,将变量模糊化,通过模糊规则输出相应的结果,模糊输出形式为语言值。
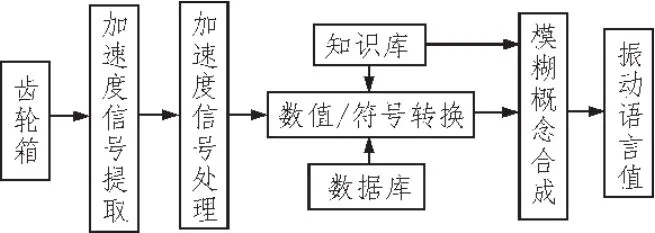
图1 模糊传感器基本逻辑结构
如图1所示,基于模糊算法理论,模糊传感器的基本逻辑结构由信号提取、信号处理、数值/符号转换、模糊概念合成4部分组成[11]。
1)加速度传感器提取信号得到齿轮箱加速度信号,完成振动信号测量任务。
2)信号处理模块有3个基本任务:信号放大和滤波、多传感器信息融合算法、模拟/数字转换和计算机之间的信息传输。
3)数字/符号转换模块是模糊测量的核心,它是由计算机完成的。振动信号的精度取决于存储库和数据库。
4)在模糊概念合成模块中,基于知识库和数字/符号转换模块的输出,模糊推理和合成,获得了正确的语言值。
1.2 模糊化
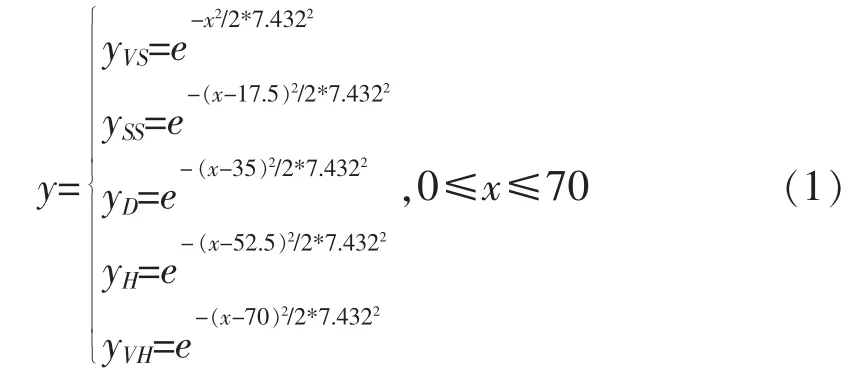
齿轮箱加速度数据范围为0~70 g,其基本论域为[0,70]。将加速度划分为5个模糊子集:{强振,较强振,中振,微振,正常},对应的模糊集合:{VH,H,D,S,VS},隶属度函数如图2所示,其公式如式(1)所示。
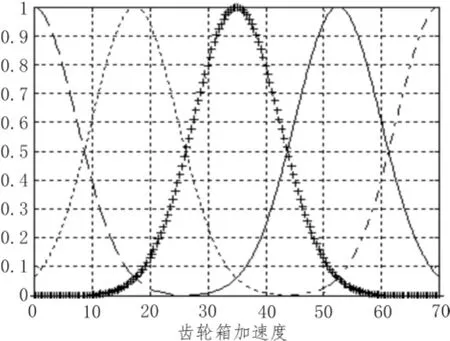
图2 齿轮箱加速度隶属度函数
1.3 模糊推理
模糊推理采用最大隶属度法,比较齿轮箱加速度所对应的 5 个隶属度大小,即 yVS、yS、yD、yH、yVH。 依据得到的最大隶属度,确定输入所属的模糊集合,输出对应的语言值,模糊规则如表1所示。
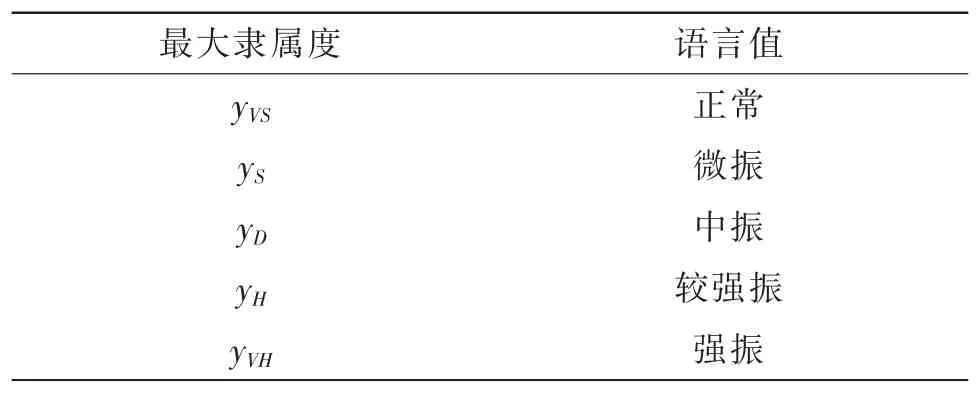
表1 模糊规则
1.4 齿轮箱振动检测
齿轮箱加速度多点检测,获得齿轮的综合振动特性。在选择检测点位置时,考虑点的数量和测量方向,所有的结构点都必须包含在测量点内[12-14]。
为了深入分析齿轮箱的振动,研究齿轮箱的主要振动原因和特点。选择8个检测点,选择可以得到齿轮箱振动的完整信息位置,如机器脚、观察盖、电机等,并且没有明显的局部振动,将检测点编号。检测点位置如图3所示。
每个传感器都有3个方向 (X,Y,Z)的传感探头,在每个几何点,在水平方向上,垂直方向和轴向方向测量振动响应。对于每个检测点,获得3个加速度信号,并计算出信号的根均方值,该值被用来作为振动响应。
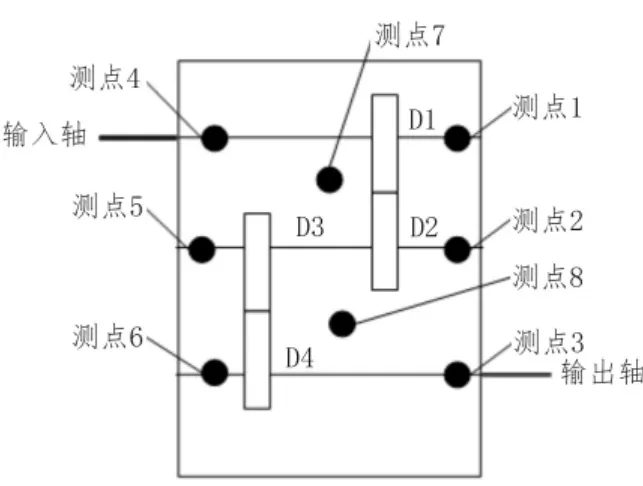
图3 检测点位置示意图
检测不同位置,观察实时工作状态,及时发现故障,从而提高齿轮箱的可靠性和稳定性。
2 仿真分析
文中基于MATLAB软件平台,构建齿轮箱加速度信号模糊识别传感器系统,编写程序并仿真,验证设计的正确性。系统顶层结构图如图4所示。

图4 系统顶层结构图
仿真数据取自文献[15],以船用齿轮箱为研究对象,获取测量数据。表2和表3分别对应于齿轮箱表面的系统动力性能优化前后的振动加速度值,X、Y、Z方向分别代表水平、垂直和轴向方向,总加速度值为均方根值。

表2 优化前的各点的振动加速度(单位:m/s2)

表3 优化后的各点的振动加速度(单位:m/s2)
优化后的平均加速度数值较小,模糊传感器输出相应的语言值,图5-图7分别为优化前后X、Y、Z方向的加速度值比较情况,图8为优化前后的总加速度值对比图。

图5 优化前后X方向的加速度值
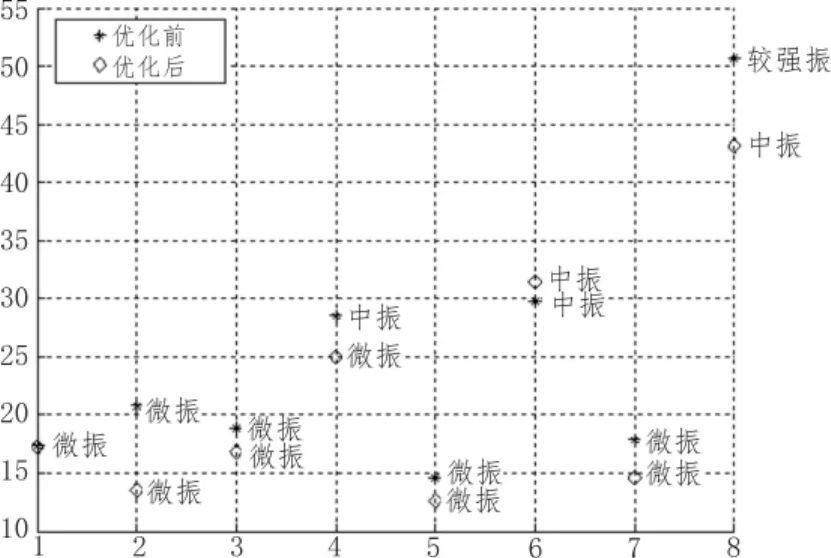
图6 优化前后Y方向的加速度值
通过对比图5~图8验证结果,齿轮箱优化后各测点加速度比优化前都有所减少,箱体振动明显改善。仿真结果证明模糊传感器输出语言值的正确性,系统设计的合理性得到验证。
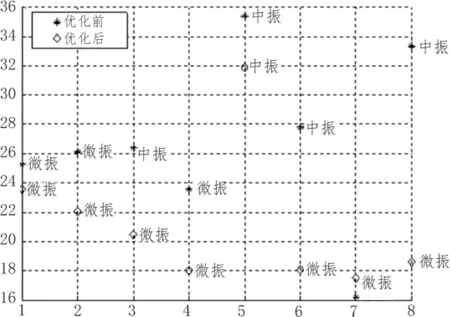
图7 优化前后Z方向的加速度值
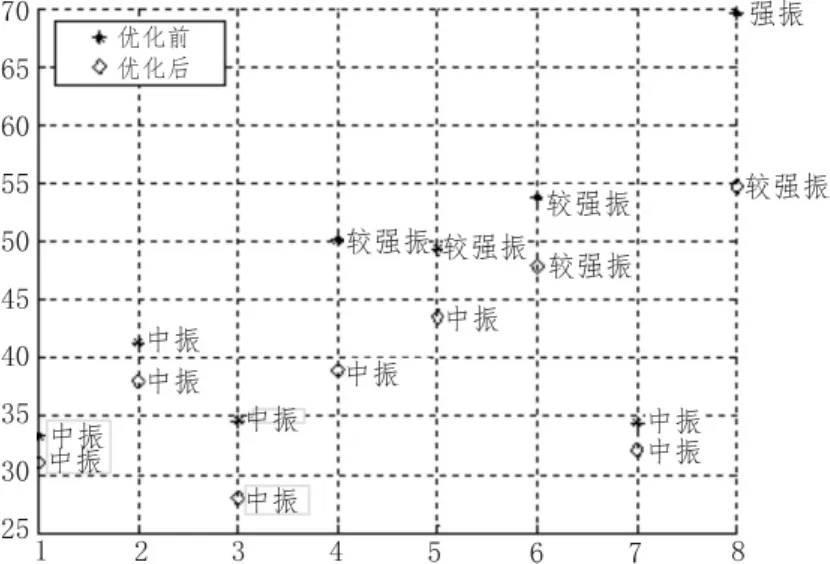
图8 优化前后的总加速度值
3 结 论
设计齿轮箱加速度信号模糊识别传感器系统,对加速度数据进行模糊化,分为5个模糊子集,模糊推理采用最大隶属度法,输出对应的语言值。利用MATLAB软件仿真,进行模糊推理仿真和曲线显示,仿真结果证明了系统设计的合理性。
本次设计为齿轮箱振动加速度测量或监测提供一种手段,也为需要解决振动现象的工程提供了参考方法。设计的系统尚有诸多不足,在齿轮箱的动态特性分析方面有很大的局限性,可以考虑多因素分析齿轮箱的振动特性,得到更好的测试结果。
[1]Hojat Heidari Bafroui,Abdolreza Ohadi.Application of wavelet energy and Shannon entropy for feature extraction in gearbox fault detection under varying speed conditions[J].Neurocomputing,2014(133):437-445.
[2]龙泉,刘永前,杨勇平.基于粒子群优化BP神经网络的风电机组齿轮箱故障诊断方法[J].太阳能学报,2012,33(1):120-125
[3]刘淑霞,崔喜贺,王家忠,等.基于虚拟仪器的机床齿轮箱故障诊断系统的设计[J].电子测量与仪器学报,2010,24(5):481-486.
[4]杨长辉,徐涛金,吴灿元.大兆瓦级风电齿轮箱耦合动态特性及结构噪声分析[J].中国机械工程,2016,27(5):609-614.
[5]孙福兆.机械传动设备齿轮箱振动频率过高检测
方法[J].计算机测量与控制,2014,22(1):66-68.
[6]WANG Shou-bin,SUN Xiao-gang,LI Cheng-wei.Wind turbine gearbox faultdiagnosismethod based on riemannian manifold[J].Mathematical Problems in Engineering,2014(1):1-10.
[7]袁雨青,李强,杨光,等.高速列车齿轮箱线路测试与异常振动分析 [J].铁道机车车辆,2016,36(1):24-29.
[8]徐英帅,王细洋,孙伟.基于小波变换的齿轮箱故障诊断 [J].重庆:组合机床与自动化加工技术,2012(2):66-71.
[9]董惠敏,李亚美,夏永,等.8MW风电齿轮箱振动特性仿真分析[J].机械设计与制造,2015(4):193-197.
[10]陆亚芳,易可夫,冯绪,等.基于模糊理论的无线传感器网络多层分簇式路由算法[J].传感技术学报,2014(7):933-938.
[11]刘君华.智能传感器系统[M].2版.西安:西安电子科技大学出版社,2010.
[12]戴光昊,付金波,张海福.齿轮箱有限元模态分析及试验研究[J].舰船科学技术,2010,32(8):167-170.
[13]林腾蛟,何泽银,钟声,等.船用齿轮箱多体动力学仿真及声振耦合分析[J].湖南大学学报:自然科学版,2015,42(2):22-28.
[14]魏静,孙清超,孙伟,等.大型风电齿轮箱系统耦合动态特性研究[J].振动与冲击,2012,31(8):16-23.
[15]王丹华.复杂激励下船用齿轮箱动态特性分析及动力性能优化[D].重庆:重庆大学,2013.
Analysis and design of the fuzzy recognition sensor system for gearbox acceleration signal
LI Jun-wei,FANG Jian-dong
(College of Information Engineering, Inner Mongolia University of Technology,Hohhot 010080, China)
In this paper, a fuzzy intelligent identification system is designed, gearbox acceleration sensor as the research object.The fuzzy control rules are set up and the simulation is carried out based on MATLAB.The simulation results show that the design of the fuzzy sensor is reasonable,which has practical guiding significance.
gearbox; sensor; acceleration; vibration
TN06
A
1674-6236(2017)12-0037-04
2016-08-23稿件编号:201608163
内蒙古自治区科学基金项目(2014MS0619);内蒙古自治区科技计划项目 (20120304)
李俊伟(1988—),男,河南开封人,硕士研究生。研究方向:信息处理与决策支持。
猜你喜欢
山东冶金(2022年3期)2022-07-19
当代水产(2022年6期)2022-06-29
现代苏州(2022年9期)2022-05-26
文萃报·周五版(2022年9期)2022-03-11
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
计算机测量与控制(2017年6期)2017-07-01
制造技术与机床(2017年4期)2017-06-22
风能(2016年12期)2016-02-25
