
基于激光测风雷达的风速前馈控制算法设计
2017-07-10 09:13:00林淑兰杰莫尔兵林志明王其君
东方汽轮机 2017年2期
林淑,兰杰,莫尔兵,林志明,王其君
(东方电气风电有限公司,四川德阳,618000)
基于激光测风雷达的风速前馈控制算法设计
林淑,兰杰,莫尔兵,林志明,王其君
(东方电气风电有限公司,四川德阳,618000)
文章提出了基于激光测风雷达的风速前馈控制算法设计,其特点是通过激光雷达准确有效地测得风力发电机组前方一定距离的风速、风向信号,并把所测信号引入到原有变桨控制算法中,设计了风速前馈控制器,实现变桨速率前馈补偿。以国产某1.5 MW风力发电机组设计为例,基于Bladed软件平台对所采用的算法进行仿真验证。结果表明,在来流作用于风轮之前,控制器就已经接收到超前信号,提前准备变桨动作,避免或大大减少风力发电机组的超速故障,降低了机组载荷,提高了风力发电机组在极端风况下的安全性,进而有助于提高发电量,改善风力发电机组的运行效率。
激光雷达,前馈控制,超速,风力发电机组
0 引言
目前风力发电机组的风轮大多运行在近地边界层下部,风况受地表情况影响比较大,风速呈现随机性、突变性等特点,且风能是一种不受控资源。风力发电机组的测风仪器主要是安装在机舱顶部的风杯和风向标,对于上风向风力机来讲,测得的风速并不是到达风轮处的风速,而是经过叶片尾流影响的风速,不具有实时性[1-3]。风杯、风向标是机械式测量仪,而我国风机大部分安装在风沙大、气候寒冷的野外地区,容易受风沙侵蚀和结冰影响,造成测量精度低,并易损坏。因此,对于控制策略来说,测得的风速、风向不是一个可靠、有效的输入量。且由于风轮具有很大转动惯量,当阵风到达时,引起的转速上升就具有较大延迟,而转速上升再反应到控制器输出,控制变桨系统收桨,又具有很大时间延迟,两部分延迟合起来构成了一个时间常数很大的环节,因此很容易在阵风情况下造成超速。特别是在地形比较复杂的风场,风速湍流较强、风向变化较快,在中高风速下,频繁发生振动、超速故障。在仿真分析中,结果显示由于湍流强度值偏大,中高风速下经常出现超速停机现象,机组载荷增大。近年来,风机超速故障使得风场运营效率低下的现象日益突显。因此,准确测风,解决风资源的极端不稳定(风向风速变化快)或尾流因素等问题,及导致超速停机问题已不能忽视。
由于大部分风力机的控制算法都是基于监测结构运转和传动链等信息作为反馈量,但这些数据对风力机受到的湍流影响,往往是不可靠或是存在延时响应的[4-5]。这就约束了控制器外在响应的控制效果,这样在湍流到达时间和执行机构开始响应之间就产生了不可避免的滞后。文献[6-7]提出了基于测量风速的前馈控制,都依赖于风速仪所测风速,所测风速与风机桨叶迎面的风速有差距,影响控制性能。如果在湍流作用于风轮之前若能监测到来流风况的话,对于防止超速、降载、减少故障停机而导致的发电量损失来说是相当有效的。
本文利用激光雷达测风设备,准确有效测得风力发电机组前方一定距离的风速、风向信号,将所测得信号引入到原有变桨控制算法中,设计风速前馈控制器,根据风速直接控制变桨系统,实现变桨速率前馈补偿,降低转速波动,有效防止风机超速停机,降低机组主要部件载荷,改善风机的运行效率。
1 激光雷达基本原理
激光测风雷达[8]是以激光为光源向大气发射激光脉冲,接收大气粒子(主要是气溶胶粒子和大气分子)的后向散射信号,通过分析发射激光和散射激光的多普勒频移来计算出风速,其基本结构框图如图1所示。
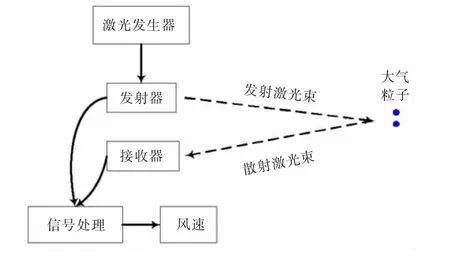
图1 激光测风雷达原理
激光发生器产生光源,通过发射器发射出去,发射器可以进行定点聚焦,以确定需要测量的风速位置,激光束碰到确定距离大气中的粒子后,进行散射,接收器接收到散射回来的激光束,通过与发射时的激光束进行对比,得出测量点粒子的运动速度。
由于大气中的气溶胶粒子对大气运动具有很好的跟随性,而如上面所述,大气粒子对激光束的散射主要是由气溶胶粒子和大气分子散射造成的,因此可以得出如下结论:大气粒子运动速度=风速,从而也就测得了风速。
本文通过激光雷达测量风速,实现了对风况提前检测。图2为一台水平轴上风向风力发电机,通过安装在机舱顶部的激光测风雷达,可以检测到风机前方来流风速、风向信息(图2中V1处的风速)。
由激光测风雷达原理可知,其可以进行定点聚焦测量某一确定位置的风速状况,因此采用检测风轮前方多个点的风速,然后进行加权平均。通过改变聚焦位置,可以同时测量图中A~F共N个点的风况,然后给每个点测得的风速赋予一个权值,如表1所示。
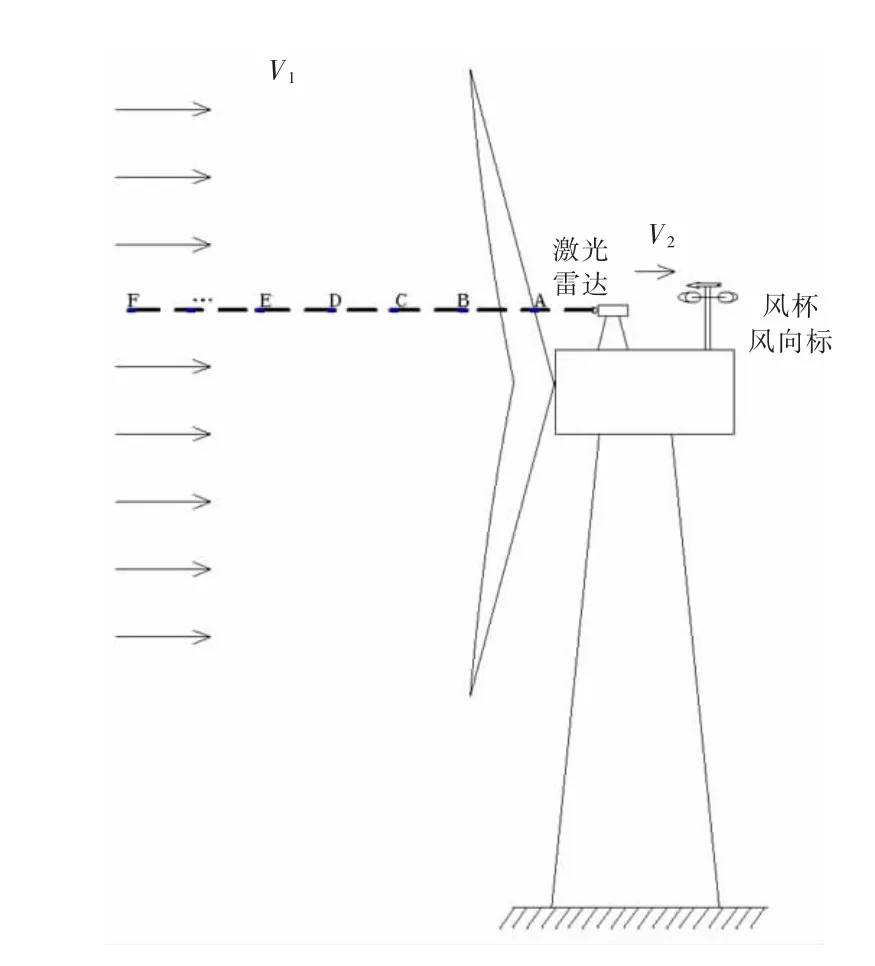
图2 风速测量原理图
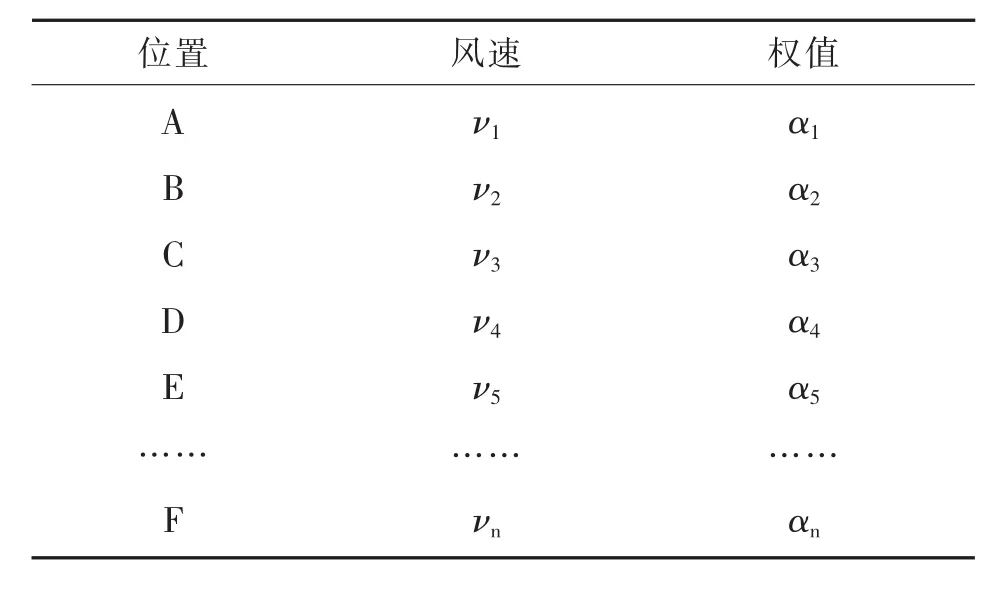
表1 风速权值
进一步对风速进行加权平均,就得到了前馈控制器的输入量V,如式(1)所示。

激光测风雷达可以测量风轮前方10 m~300 m范围内的风况,选择每隔10 m测量一个点,总共测量10个点,权值函数分别选取两类权函数进行控制,如下图所示。

图3 高斯型权函数(中心值=10 m,方差=40)
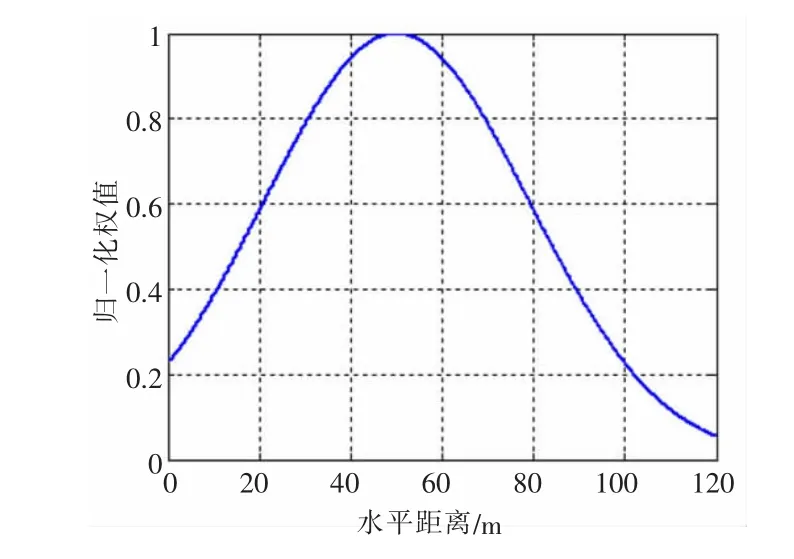
图4 高斯型权函数(中心值=50 m,方差=40)
图3中权函数作为风轮前方10 m处检测风速,可用于前馈控制输入,而图4中权函数作为风轮前方50 m处预测风速,可用作提前停机,提前偏航等安全监督控制。
2 前馈控制
前馈控制针对可测扰动,具有很好的补偿作用,能够提高系统的输出特性,且在工业上已经有了广泛的应用领域[9]。由激光雷达基本原理可知,其可准确有效测量出风机前方一定距离内的风速,相当于提前预知了风速扰动信号,把激光测风雷达监测到的风速作为控制输入量,参与控制,在原有转速-转矩控制基础上,增加一个风速前馈控制单元,如图5所示,风速前馈控制器用于抵消由于风速波动对转速产生的影响,即补偿图5中虚线框内风速-转速传递函数的影响。
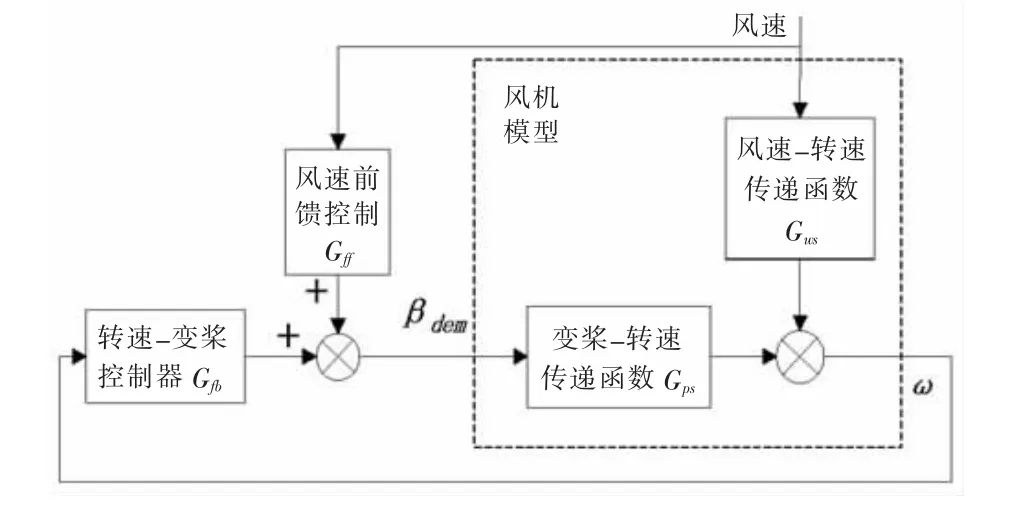
图5 风速前馈控制原理图
前馈控制器从理论上讲,可以完全抵消风速波动对转速的影响,只要满足式(2)且Gps为可逆系统。

但是由于风速-转速传递函数Gws的复杂性,不能精确获得,Gps不一定为可逆系统,因此式(2)表达的动态前馈控制器不能实现。为此,考虑采用静态前馈补偿器如式(3)所示。

其中:ν表示测量风速,β(ν)表示稳态时风速对应的桨距角函数,如图6所示。
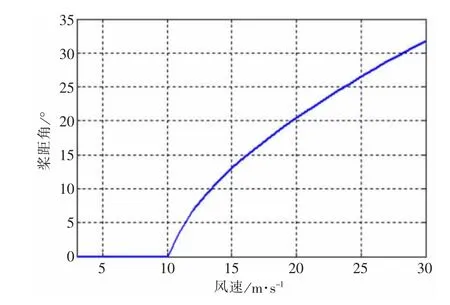
图6 稳态风速-桨距角函数曲线
式(3)前馈控制算法为静态完全补偿算法,实际的风力发电机组运行过程中,风速变换较快,不可能达到完全补偿,为了提高补偿效果,在式(3)基础上采用变桨速率补偿前馈控制器如式(4)所示。

式中:β˙为前馈变桨速率,ν˙为风速变化速率,为了避免在额定风速附近dβ/dν剧烈变化,限制dβ/dν的值,如图7所示。
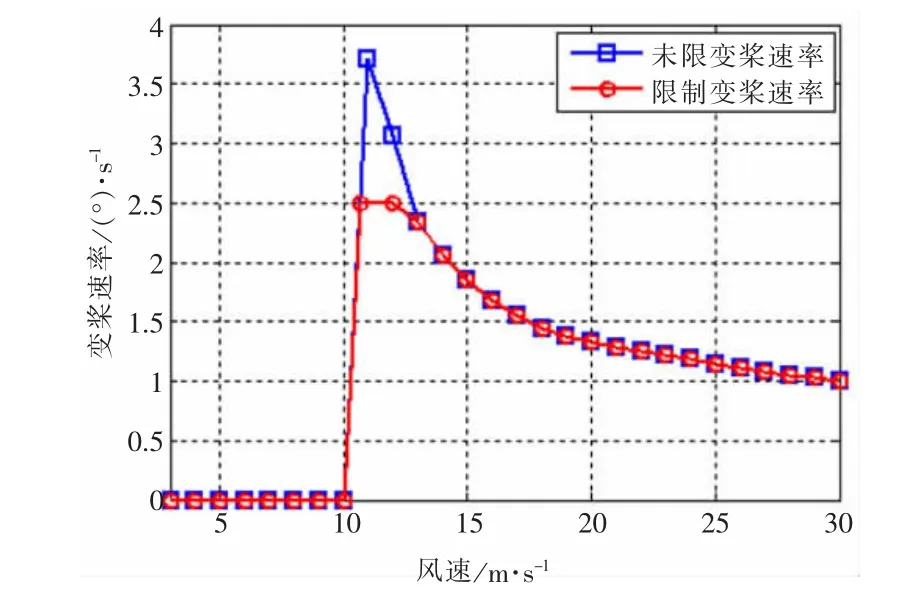
图7 稳态风速-变桨速率函数曲线
3 仿真分析
本文基于Bladed软件平台对某国产1.5 MW机组进行仿真分析,轮毂中心高度60 m,A类湍流,风速阈值9 m/s,测量风轮前方70 m处风速,采样周期为1 s,测量噪音为均匀分布,范围为± 0.5 m/s。仿真计算结果如下图所示。
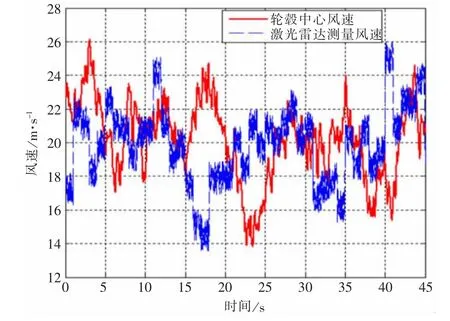
图8 风速对比曲线
由图8知,激光雷达测量风速能够完全表征实际的风况,可以作为有效的风速参考控制量。
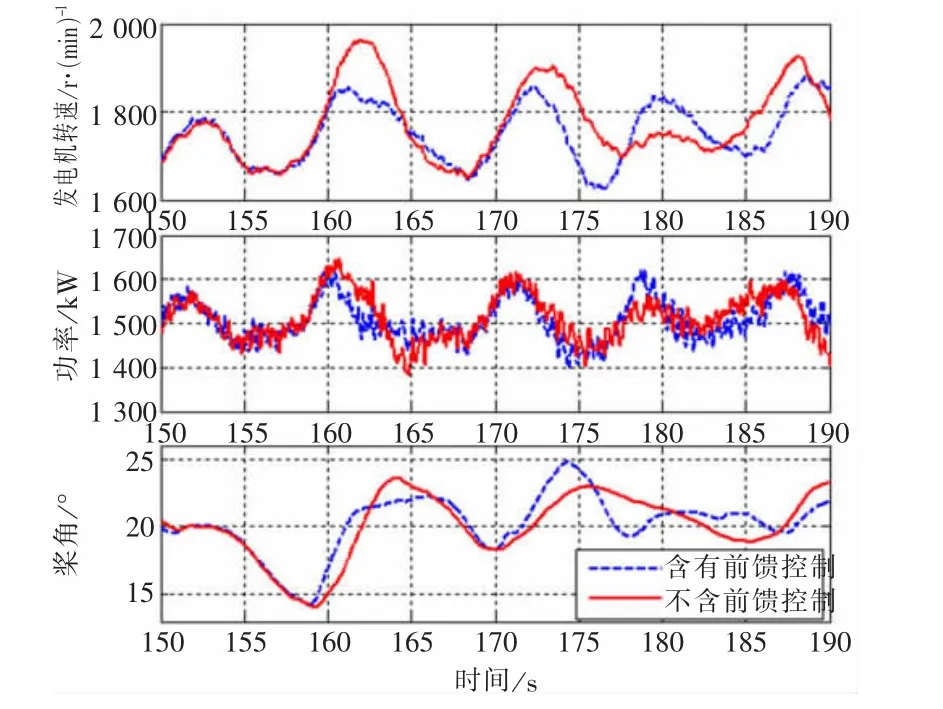
图9 16 m/s的湍流风仿真结果
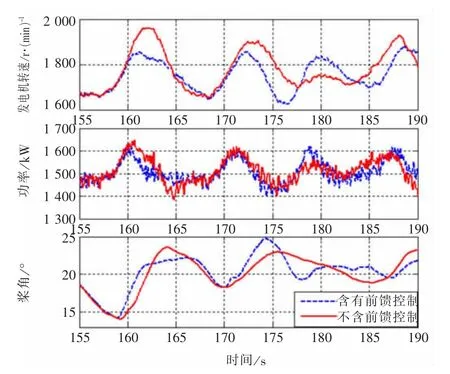
图10 20 m/s的湍流风仿真结果

图1150 年一遇IEC阵风15 m/s仿真结果
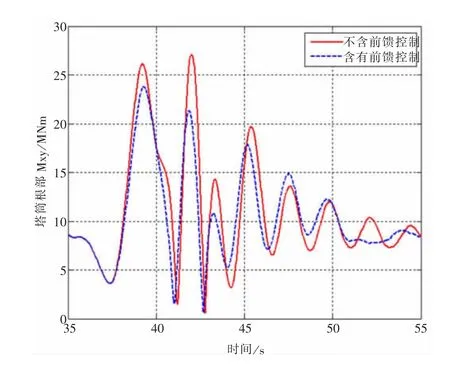
图12 50年一遇IEC阵风15 m/s塔筒根部载荷对比
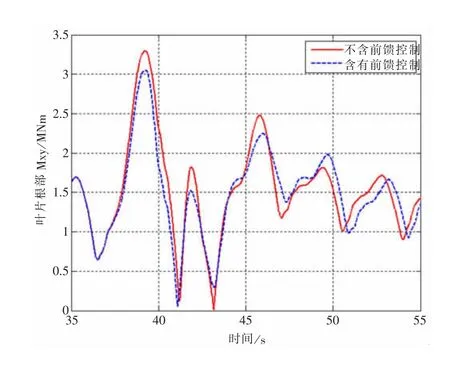
图13 50年一遇IEC阵风15 m/s叶片根部载荷对比
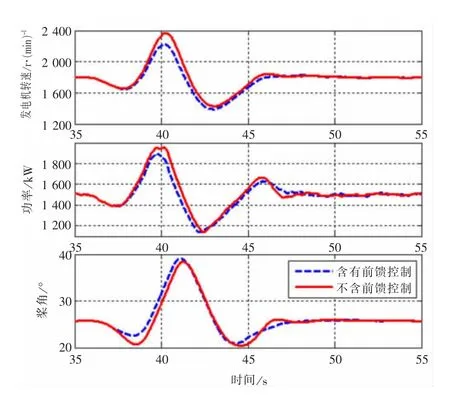
图14 50年一遇IEC阵风25 m/s仿真结果
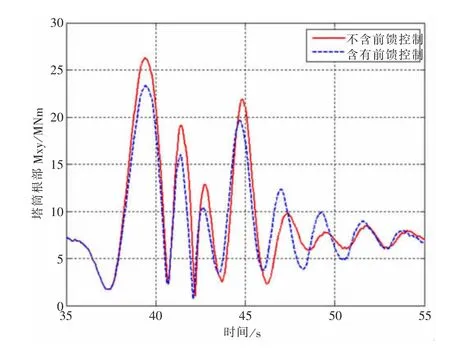
图15 50年一遇IEC阵风25 m/s塔筒根部载荷对比
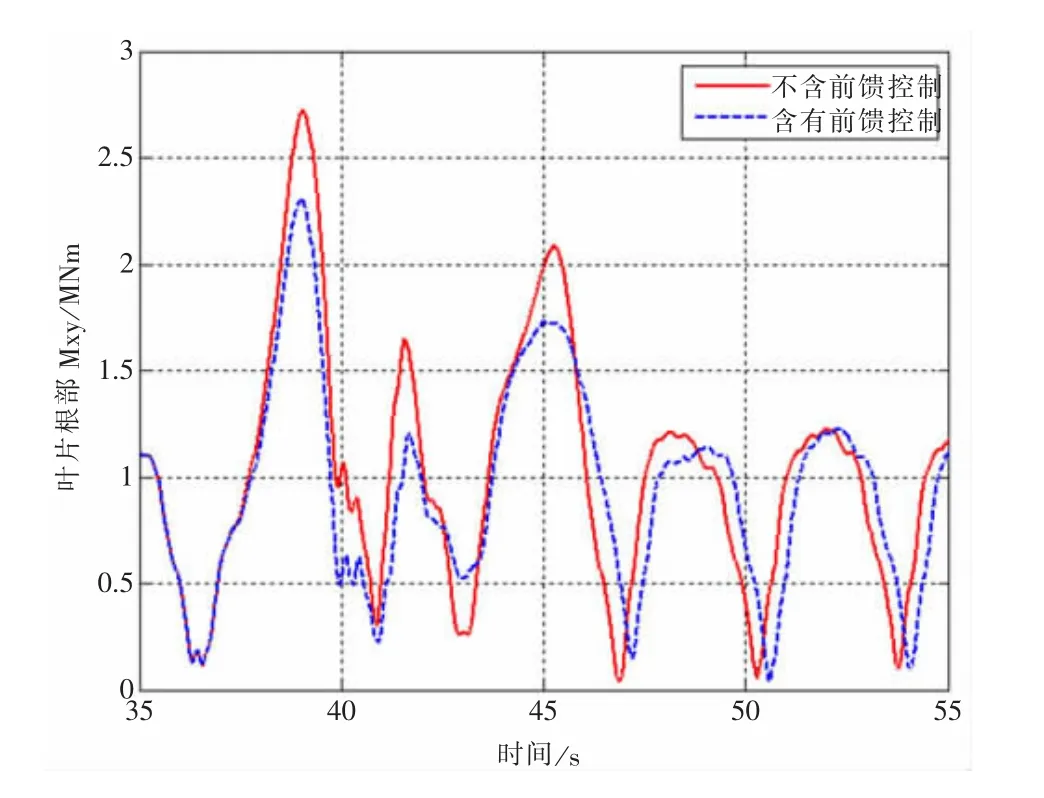
图16 50年一遇IEC阵风25 m/s叶片根部载荷对比
由图9~图16仿真结果可知,基于激光测风雷达测风的前馈控制在保证功率输出基本不变的情况下,对转速波动有很好的控制效果,可以大大减少风力发电机组的超速故障,提升风机运行效率。同时在极端风况运行情况下,机组关键部件塔筒根部和叶片根部的极限载荷均显著降低,提高了机组的使用寿命。
4 结论
通过Blade软件仿真研究表明,采用激光测风雷达前馈控制算法的设计,前馈控制器抵消由于风速波动对转速产生的影响,保证功率输出不变的情况下,减少了机组的超速故障,降低了机组载荷,有助于提高发电量,改善机组的运行效率和安全性,提高机组使用寿命。
[1]徐明,朱庆春.风向风速测量仪设计[J].气象水文海洋仪器,2008,(4):5-10.
[2]何云武.风向风速传感器的原理及其检测[J].四川气象, 2004,24(1):40-42.
[3]陈梅,洪飞,李鑫,等.风速风向传感器在风机控制中的应用与研究[J].自动化技术与应用,2008,27(4):38-41.
[4]李辉,叶仁杰,高强,等.传动链模型参数对双馈风电机组暂态性能影响[J].电机与控制学报,2010,14(3):24-30.
[5]何玉林,黄伟,李成武,等.大型风力发电机传动链多柔性动力学建模与仿真分析[J].机械工程学报,2014,50(1):60-69.
[6]郭鹏.模糊前馈与模糊PID结合的风力发电机组变速变桨距控制[J].中国电机工程学报,2010,30(8):123-128.
[7]松坂知行,王丽珠.风力发电机输出功率波动的稳定性控制[J].大中型风力发电技术,2000,(1):110-121.
[8]王保成,张卫华.激光雷达工作原理与气象探测[J].现代物理知识,2001,15(6):34-35.
[9]胡寿松.自动控制原理:第五版[M].北京:科学出版社, 2007.
Design of Wind Speed Feedforward Control Algorithm Based on Laser Lidar
Lin Shu,Lan Jie,Mo Erbing,Lin Zhiming,Wang Qijun
(Dongfang Electric Wind Power Co.,Ltd.,Deyang Sichuan,618000)
A design of wind speed feedforward control algorithm was presented based on laser lidar in this paper.Through measuring the wind speed and wind direction signal accurately at a certain distance in front of the wind turbine,and introducing the measured signals into the pitch control algorithm,the wind speed feedforward controller was designed,then achieved the pitch rate feedforward compensation.Taking 1.5 MW wind turbine as an example,this algorithm was simulated based on the GH Bladed software in this paper.The simulation results showed that the controller would receive the leading signal and ready ahead to perform pitch action before the flow was acted on the wind turbine.It avoided or greatly reduced the over speeding fault of wind turbine and lowered the load.So it improved the safety of wind turbine in extreme wind conditions,which helps to improve the power generation and the efficiency of wind turbine.
laser lidar,feedforward control,over-speeding,wind turbine
TP273
A
1674-9987(2017)02-0051-05
10.13808/j.cnki.issn1674-9987.2017.02.012
基金编号:四川省科技支撑计划项目资助项目(2014GZ0084)
林淑(1986-),女,工学硕士,2012年毕业于沈阳工业大学控制理论与控制工程专业,现从事风电控制设计工作。
猜你喜欢
太阳能(2019年10期)2019-10-29 07:25:08
中医眼耳鼻喉杂志(2019年2期)2019-04-13 05:23:46
大电机技术(2018年4期)2018-09-26 03:11:38
小资CHIC!ELEGANCE(2016年26期)2016-12-13 20:06:51
通信电源技术(2016年1期)2016-04-16 04:57:28
知识经济·中国直销(2016年3期)2016-02-27 16:15:34
电源技术(2016年2期)2016-02-27 09:05:15
风能(2015年8期)2015-02-27 10:15:11
风能(2015年4期)2015-02-27 10:14:30
电气传动自动化(2014年6期)2014-03-20 13:36:22
