
大型船舶配电监控系统组网技术探究
2017-07-07 13:36:39程华,王伟
上海船舶运输科学研究所学报 2017年2期
程 华, 王 伟
(中国舰船研究设计中心,武汉 430064)
大型船舶配电监控系统组网技术探究
程 华, 王 伟
(中国舰船研究设计中心,武汉 430064)
基于现场总线的配电监控已成为当前船舶电力系统重要的发展方向,有必要开展大型船舶配电监控系统组网技术研究。针对区域配电监控控制器域网络(Controller Area Network,CAN)和现场配电监控CAN网络,通过理论分析和计算,给出网络数据采样频率、最大长度、传输速率和最大节点数量等网络技术参数选择的依据,为大型船舶配电监控系统的组网设计提供参考。
船舶电力监控;配电系统;控制器局域网络;传输速率;采样频率
0 引 言
随着计算机技术和网络技术不断发展,船舶电力系统的自动化水平不断提高,已从传统的电站自动化逐步向配电自动化扩展[1-3]。基于现场总线的配电监控已成为当前船舶电力系统的重要发展方向,并已在某大型船舶上得到成功应用[4-5]。
由于大型船舶上的配电设备众多且分布较广,导致配电监控的数据量巨大,网络传输困难。为保障配电监控网络的可靠性和实时性,需选择合适的网络技术体制,并合理地设置监控网络的技术参数,包括网络长度限制、网络传输速率和网络节点数量限制等。已有研究主要集中在配电监控网络的总体规划上,对具体的网络技术参数研究较少。因此,有必要开展大型船舶配电监控系统组网技术的研究,明确相关网络技术参数的选择,为大型船舶配电监控系统的组网设计提供参考。
1 大型船舶电力监控网络的总体设计
大型船舶电力监控系统按层次可划分为综合管理层、区域监控层和现场采集层[6],电力监控网络可划分为综合管理层网络、区域监控层网络和现场采集层网络。电力监控网络的拓扑结构见图1。
1) 综合管理层网络用于实现大型船舶各立体区域间的通信,一般采用冗余的高速交换式工业以太网。
2) 区域监控层网络用于实现船舶立体区域内各现场监控设备间的通信,一般采用双冗余控制器局域网络(Controller Area Network,CAN)。现场采集层网络用于实现小范围内现场监控设备与本地传感器间的通信。
3) 综合管理层网络和区域监控层网络一般通过智能网关实现互联,区域监控层网络与现场采集层网络一般通过现场监控设备实现互联[6-7]。
区域监控层网络按照功能系统可划分为区域电站监控网络和区域配电监控网络等;现场监控层网络按照功能系统可划分为现场电站监控网络和现场配电监控网络等。这里重点研究区域配电监控网络和现场配电监控网络的组网技术。
2 区域配电监控网络组网技术
区域配电监控网络的主要作用为:将综合管理层网络下达的配电控制指令传送给现场配电监控设备,并将现场配电监控设备采集到的监测信息上传至综合管理层网络。
区域配电监控网络一般采用CAN网络。由于大型船舶区域配电设备众多,导致需采集的配电监测数据量巨大,且配电设备一般就近分布在用电设备周围,导致配电设备在船舶立体空间上的分布范围很广。CAN网络在传输速率与传输距离上存在一定的限制关系(见表1),且网络传输速率、监测数据采样频率和配电设备节点数量间存在数据量的制约关系,因此单个区域配电监控网络存在网络传输速率选择、网络长度限制、监测数据采样频率选择和配电设备节点数量限制等网络参数设置方面的问题。这些网络参数间相互制约,通过理论计算与分析,给出这些网络参数选择方面的建议。

表1 CAN网络传输速率与传输距离之间的关系
2.1现场配电监控设备上传网络的数据量估算
对于配电设备而言,一般与现场配电监控设备一一对应。配电设备的监测信息主要是配电设备所包含断路器的电量信息和分合状态信息,其中电量信息包括三相电压、三相电流和功率。配电设备监测信息的数据量与其包含的断路器数量和网络采样频率直接相关。此外,现场配电监控设备上传的网络数据还包括部分报警信息和事件信息。
2.1.1 CAN网络数据帧的数据量D0
根据CAN通信协议的特点,CAN网络单个数据帧的数据量一般为
D0=帧头(29 bit)+数据(8×8 bit)=93 bit
(1)
2.1.2 单个断路器需上传的监测数据量D1
单个断路器需传输的监测信息包括三相电压、三相电流、功率和断路器分合状态,其中,三相电压和功率可打包为1帧数据,三相电流和断路器分合状态可打包为1帧数据。因此,单个断路器需传输的监测数据量为2帧数据。则单个断路器需上传的监测数据量D1
D1=2×D0=186 bit
(2)
2.1.3 单个配电设备每秒需上传的监测数据量D2
若单个配电板包含的开关数量为n,配电监测网络的数据采样频率为f1,则配电板每秒需传输的监测数据量D2为
D2=f1×n×D1
(3)
2.1.4 单个现场配电监控设备每秒传输的数据量D3
现场配电监控设备上传的网络数据除监测数据D2之外,还包括部分报警信息和事件信息。报警信息主要包括断路器过载和脱扣等,事件信息主要包括断路器合闸和分闸等。
报警信息和事件信息为实时上传数据,1个报警信息为1帧数据,1个事件信息为1帧数据。若报警信息的产生频率为f2,事件信息的产生频率为f3,则单个现场配电监控设备每秒上传网络的数据量D3为
D3=D2+f2×D0+f3×D0
(4)
一般而言,报警信息的频率f2≤1 Hz,事件信息的频率f3≤1 Hz。因此,作为一种近似估算,式(4)可简化为
D3=D2+2D0
(5)
现场配电监控设备除上传网络的数据D3之外,还会接受上层网络下达的对时信息和开关分闸、合闸指令。
2.1.5 单个现场配电监控设备每秒上传数量据量D4
对时信息为固定频率信息,控制指令为实时下达数据,1个对时信息为1帧数据,1个控制指令为1帧数据。若对时信息的产生频率为f4,控制指令的产生频率为f5,则单个现场配电监控设备每秒传输网络的数据量D4为
D4=D3+f4×D0+f5×D0
(6)
一般而言,对时信息的频率f4≤1 Hz,控制指令的频率f5≤1 Hz。因此,作为一种近似估算,式(6)可简化为
D4=D3+2D0=D2+4D0
(7)

表2 单个现场配电监控设备每秒上传网络的数据量D4
若配电监测网络的数据采样频率为f1=0.5 Hz,1 Hz,2 Hz,单个配电设备包含的开关数量n=10,20,40,则根据式(1)~式(7),通过计算可知单个现场配电监控设备每秒上传网络的数据量D4(见表2)。
2.2CAN网络允许接入的现场配电监控设备节点数量N估算
若CAN网络传输速率为B,网络传输数据的占空比为r,则CAN网络允许接入的现场配电监控设备节点数量N为

N=


(8)
2.3区域配电监控CAN网络技术参数的选择
一般而言,大型船舶区域配电监控网络的总长度在200~3 000 m之间。为保证数据可靠传输,网络占空比r不宜太高,一般设置为0.6。根据表1和式(1)~式(8),通过计算可得到典型区域配电监控CAN网络的采样频率、最大传输距离、网络传输速率和配电监控设备节点数量间的关系(见表3)。
由于大型船舶配电设备的数量可多达几百个,因此需将全船配电监控网络合理的划分为若干个区域配电监控网络。例如,若全船配电设备有200个,每个配电设备包含的开关数量n=20,区域配电监控网络的最大长度约为1 000 m,则从表3可知,比较合适的CAN网络技术参数选择为网络采样频率f1=0.5 Hz,网络传输速率B=50 kpbs,网络节点数量N≤13,全船区域配电监控网络最少需要设置16个。
3 现场配电监控网络组网技术
随着智能化和信息化技术的发展,国内外多型开关都集成电量信息采集、开关状态采集和遥控分合闸的功能。配电设备内的现场配电监控设备与开关之间通过网络实现互联,完成现场信息的采集和开关分合闸指令的下达。
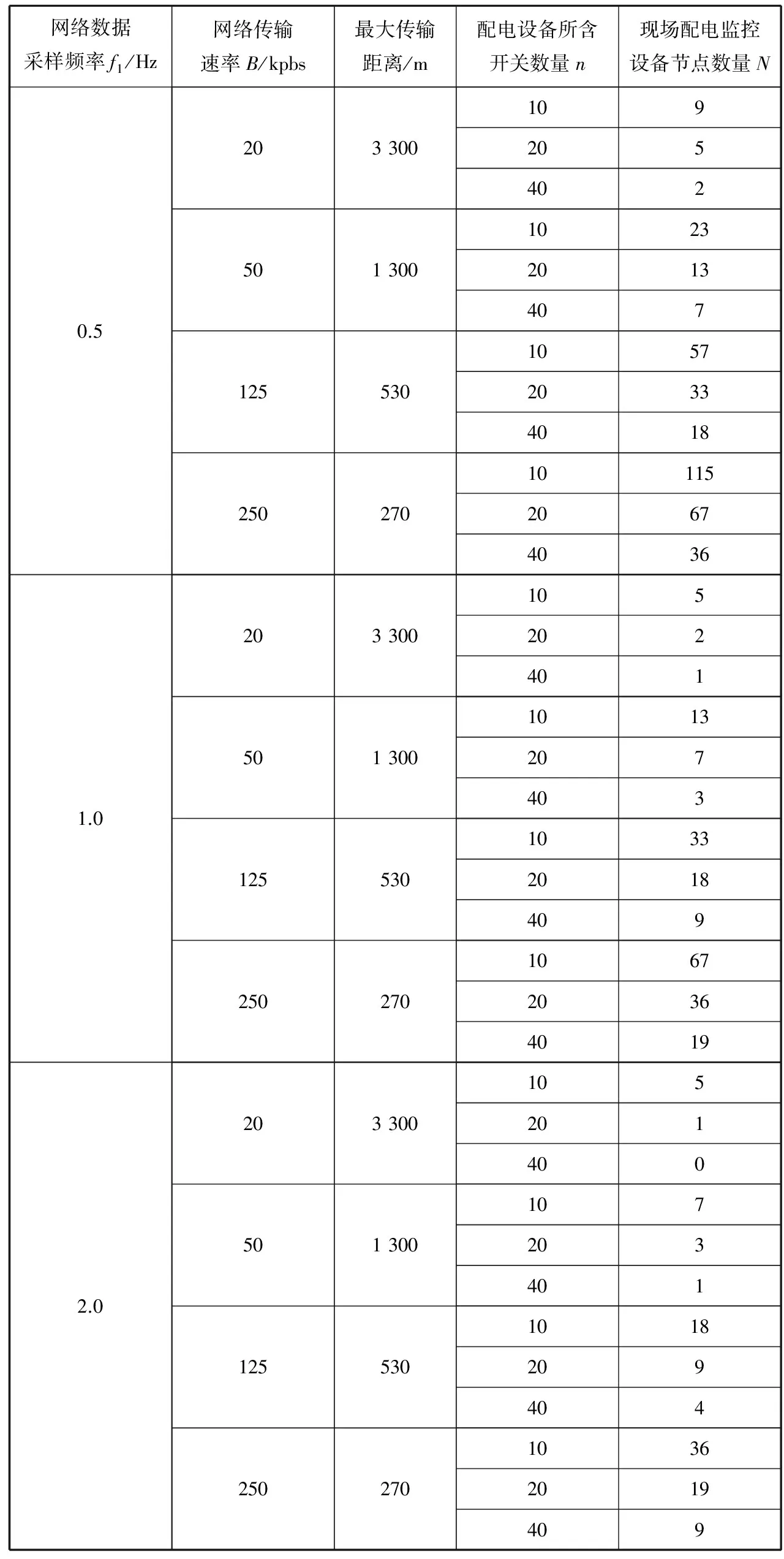
表3 区域配电监控CAN网络技术参数间关系
由于配电设备内部电磁环境较为复杂,对现场配电监控网络的抗干扰能力要求较高,而CAN网络抗干扰能力较强,因此现场监控网络采用CAN网络是比较合适的选择。
若现场监控层网络的采样频率为f6。开关的报警信息频率为f7,事件信息频率为f8,对时信息频率为f9,控制指令频率为f10,则在现场监控层网络,每个开关需要传输的数据量D5为
D5=f6D1+f7D0+f8D0+f9D0+f10D0
(9)
一般而言,开关的报警信息频率为f7,事件信息频率为f8,对时信息频率为f9,控制指令频率为f10均不超过1 Hz,作为一种近似估算,式(9)可简化为
D5=2f6D0+4D0
(10)
若现场监控层CAN网络传输速率为B1,网络传输数据的占空比为r1,则CAN网络允许接入的开关节点数量N1为
N1=

(11)
一般而言,现场配电监控网络的总长度在几米至一百米之间。为保证数据的可靠传输,网络占空比r1不宜太高,一般设置为0.6。根据表1中式(11),通过计算可得到典型现场配电监控CAN网络的采样频率、最大传输距离、网络传输速率和开关节点数量之间的关系见表4。

表4 现场配电监控CAN网络技术参数之间的关系
由于单个配电设备内的开关数量在几个至几十个之间,因此从表4可知,单个配电设备内部仅需组建一个现场配电监控CAN网络。若配电设备包含的开关数量N1=40,现场配电监控网络的最大长度约50 m,则由表4可知,比较合适的CAN网络技术参数选择为网络采样频率f1≤40 Hz,网络传输速率B=500 kpbs。
4 结 语
提出一种大型船舶配电监控系统组网设计方法。针对区域配电监控CAN网络和现场配电监控CAN网络,通过理论分析与计算,给出网络数据采样频率、最大长度、传输速率和最大节点数量等网络技术参数选择的依据,为大型船舶配电监控系统的组网设计提供参考。
[1] 祝贺. 船舶电力监控系统设计[D].哈尔滨:哈尔滨工程大学,2009.
[2] 陈在平,岳有军. 工业控制网络与现场总线技术[M].北京:机械工业出版社,2006.
[3] 孙建红,高捷. 船舶配电监测系统设计研究[J]. 中国舰船研究,2010(2):69-73.
[4] 赵洁,茅云升. 基于现场总线的船舶配电监测系统研究[J].船海工程,2011,40(2):32-35.
[5] 孙建红,高捷,程华. 大型船舶现场级电力监控网络优化研究[J]. 船电技术,2015,35(8):9-13.
[6] 徐钧,蒋子峰. 大型船舶电力监控系统层次化设计[J]. 机电设备, 2015(3):56-58.
[7] 杨柳涛. 以太网技术在船舶电力监控系统中的应用[J].上海船舶运输科学研究所学报,2006,29(2):90-93.
NetworkingofPowerDistributionMonitoringSystemonLargeShips
CHENGHua,WANGWei
(China Ship Development and Design Center, Wuhan 430064, China)
The objects of ship power monitoring have been extending gradually from power generation to power distribution. We can see that a lot of effort is put into developing power distribution monitoring systems based on CAN-Bus. With theory analysis and computing, this paper proposes a method for choosing network parameters of regional and local CAN-Bus-Based power distribution monitoring networks, such as sampling frequency, largest bus length, transmission rate, largest number of nodes.
ship power monitoring system; power distribution system; CAN-Bus; transmission rate; sampling frequency
2017-03-20
程华(1982—),湖北禾壁人,工程师,博士,主要从事船舶电气和图像处理研究。
1674-5949(2017)02-0042-05
U665.1
:A
猜你喜欢
北京大学学报(自然科学版)(2021年3期)2021-07-16 07:13:40
东北师大学报(自然科学版)(2021年1期)2021-03-27 01:22:14
电脑爱好者(2020年19期)2020-10-20 06:02:06
电子制作(2019年13期)2020-01-14 03:15:18
经济技术协作信息(2018年7期)2019-01-14 03:05:40
电子制作(2018年18期)2018-11-14 01:48:20
通信电源技术(2018年5期)2018-08-23 01:16:20
黑龙江电力(2017年1期)2017-05-17 04:25:16
CHIP新电脑(2016年9期)2016-09-21 10:31:09
发明与创新·大科技(2015年9期)2015-05-30 10:48:04
