
基于自适应方法的欠驱动AUV地形跟踪控制
2017-07-05 09:37白继嵩庞永杰万磊张英浩张强
电机与控制学报 2017年6期
白继嵩, 庞永杰, 万磊, 张英浩, 张强
(哈尔滨工程大学 水下机器人技术重点实验室,黑龙江 哈尔滨 150001)
基于自适应方法的欠驱动AUV地形跟踪控制
白继嵩, 庞永杰, 万磊, 张英浩, 张强
(哈尔滨工程大学 水下机器人技术重点实验室,黑龙江 哈尔滨 150001)
为保证欠驱动智能水下机器人(AUV)面对干扰时具有更高精度的地形跟踪能力,提出一种自适应地形跟踪控制方法。首先,对某型欠驱动AUV进行了结构分析,建立了相关运动学及动力学模型;然后,提出一种结合模糊思想的自适应地形跟踪策略,并利用自抗扰控制建立相应运动控制器;最后,分别进行两组对比实验,以测试所设计地形跟踪方法的有效性。实验结果表明,所设计的欠驱动AUV自适应地形跟踪控制方法具有良好的响应能力,并且,相比于传统比例-积分-微分(PID)控制方法,能够更有效地抑制干扰所造成的震颤现象,具有更高的控制精确度。该控制方法的研究对提高欠驱动AUV在进行地形跟踪任务时的智能性具有一定意义。
控制科学与技术;智能水下机器人;欠驱动;地形跟踪控制;自适应;模糊控制;自抗扰控制方法
0 引 言
欠驱动智能水下机器人(autonomous underwater vehicle,AUV)是一种独立控制输入维数少于系统自由度的潜水器[1]。伴随人类对海洋资源的开发深入,欠驱动AUV逐渐开始承担海底石油管道检查以及水底地形探测等任务。这些任务都需要欠驱动AUV具有良好的地形跟踪能力。
所谓地形跟踪,是指AUV以合适的方式下潜到作业水深后,与水底保持一定高度运动的能力。在此方面,国内外已有多位学者进行了相关研究。Silvestre Carlos等[2]利用水声设备测量地形时的声学特征,来对AUV进行控制指令下达,并以INFANTE AUV进行了仿真测试;万磊等[3]为实现欠驱动AUV的精确跟踪控制,提出自适应模糊反演滑模控制系统,解决其水平面航迹跟踪问题;周焕银等[4]针对自主水下机器人数学模型的强非线性及所受海流干扰无法确定等特点,利用神经网络所具有的自适应控制实现对不确定模型与干扰项进行补偿控制,提高自主水下机器人运动控制的鲁棒性;刘云龙等[5]利用具有光滑性和饱和性的sigmoid函数,提出一种水下机器人软变结构控制策略。Adhami-Mirhosseini Aras等[6]利用事先测得的目标地形数据,在AUV执行地形跟踪任务前,生成跟踪路径,从而将地形跟踪问题,转化为路径跟踪问题。因而,从前人的研究成果中可以看出,目前主要有两种研究趋势,一种是将新的控制算法或控制策略引入到AUV地形跟踪控制领域;另一种则是侧重于提升AUV感知外界环境的能力,将传感器数据进行融合或深入分析,从而获得跟踪地形的更多信息。
结合前人的研究思路,本文侧重于对运动控制方面的完善:一方面,设计合适的控制策略;另一方面,引入优秀的控制算法。所以,针对欠驱动AUV设计了结合模糊控制以及自抗扰控制的自适应地形跟踪方法,以期获得最优的控制效果。
1 运动模型的建立
1.1 控制对象及坐标系
控制研究对象为哈尔滨工程大学设计的某型AUV,其主体大致成细长回转体,运动执行器只有安装于艇体艉部的舵、翼和主推各一套,属于典型的欠驱动控制方式。为研究问题和后文叙述方便,在此分别建立大地坐标系E-ξζ和艇体坐标系O-xz,如图1所示。E-ξζ是惯性坐标系,而O-xz属于非惯性坐标系,并且O-xz的原点O与AUV艇体的重心G重合。
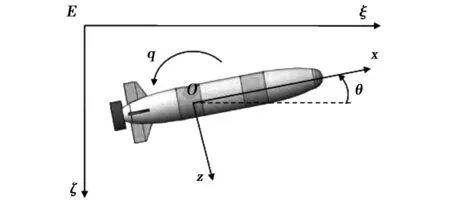
图1 AUV外观及建立的坐标系Fig.1 Appearance of AUV and establishment of the coordinate system
图1中的θ与q是AUV的纵倾角θ和相应角速度,并且正方向如图所示。
1.2 运动学及动力学模型
由文献[7]可知,当AUV在垂直面内运动时,其运动学模型及动力学模型可分别表示为式(1)和式(2)。
(1)

(2)



C(V)为向心力矩阵,可表示为


D(V)为阻尼矩阵,可表示为


F0为零升力矩阵,可表示为

Z0和M0分别是由于AUV艇体上下水平面不对称引起的垂向力和艏艉中剖面不对称引起的纵倾力矩。τ为控制输入力,可表示为:τ=[X,Z,M]T,X、Z和M分别是纵向控制力、垂向控制力和纵倾力矩,由于所研究对象为欠驱动AUV,因而Z=0。f为干扰力,m为AUV的质量,I为AUV在O-xz面内的转动惯量,F(·)和M(·)为相应的水动力系数。
2 地形跟踪策略
2.1 欠驱动AUV地形跟踪
对于欠驱动AUV而言,在其艇体垂向并没有相应的运动执行机构,因而无法直接提供控制力。若想让欠驱动AUV实现地形跟踪功能,需要设计一种合适的控制策略来实现“高度”、“深度”以及“纵倾”三者之间的转化,进而完成跟踪任务。“高度”、“深度”以及“纵倾”之间的转化关系可以通过式(3)和式(4)完成。
ζd=ζP+hP-h0,
(3)

(4)
结合图2做进一步说明。当AUV处于位置P时,AUV会通过安装于其上的深度计和高度计分别获得当前深度ζP和当前高度hP,以此作为控制的基础。若AUV需要保持与跟踪地形之上高度为h0的位置,则可首先通过式(3)获得期望深度ζd,然后通过式(4)获得期望纵倾角θd。ζe为期望深度ζd与当前深度ζP之差,u为当前AUV航速,A为可调参数,且A<0。为保证AUV在控制过程中避免危险的姿态,可设定“安全阈值”。当解算出的θd超过设定阈值,则按安全阈值进行控制输入。
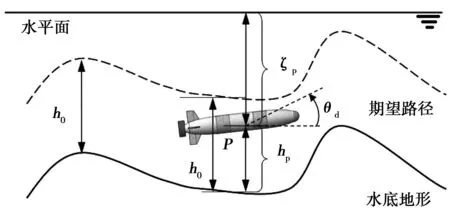
图2 “高度-深度-纵倾”关系图Fig.2 Relation graph of the height-depth-trim
2.2 自适应参数调整
若通过2.1中所示方法,利用相同参数的PID控制器,但是选用不同式(4)中的参数A,均令AUV下潜至5m,则可得到图3所示结果。
从图3中可看出,即使应用相同的控制器,但是通过设定不同的参数A,仍然可以得到不同的控制效果。对于欠驱动AUV而言,在进行大范围运动过程中,外界环境有可能出现明显变化,从而影响AUV的运动性能。如果此时不及时调整相应控制器参数,那么就难以获得良好的控制效果。但如果调整控制器参数,就要先明确各控制参数之间的关系,若控制器参数较多,调整起来就会相对困难。因而,如果选用性能优良的控制器之后,一旦设定好参数,就停止调整,然后转为调整控制策略中的其它参数,也是一种有益尝试——对于欠驱动AUV的自适应地形跟踪控制,只需调整跟踪策略中式(4)的参数A。因而,结合模糊控制方法,将相关控制的参数A调整经验融入其中,从而形成参数A的调整方法,如图4所示。
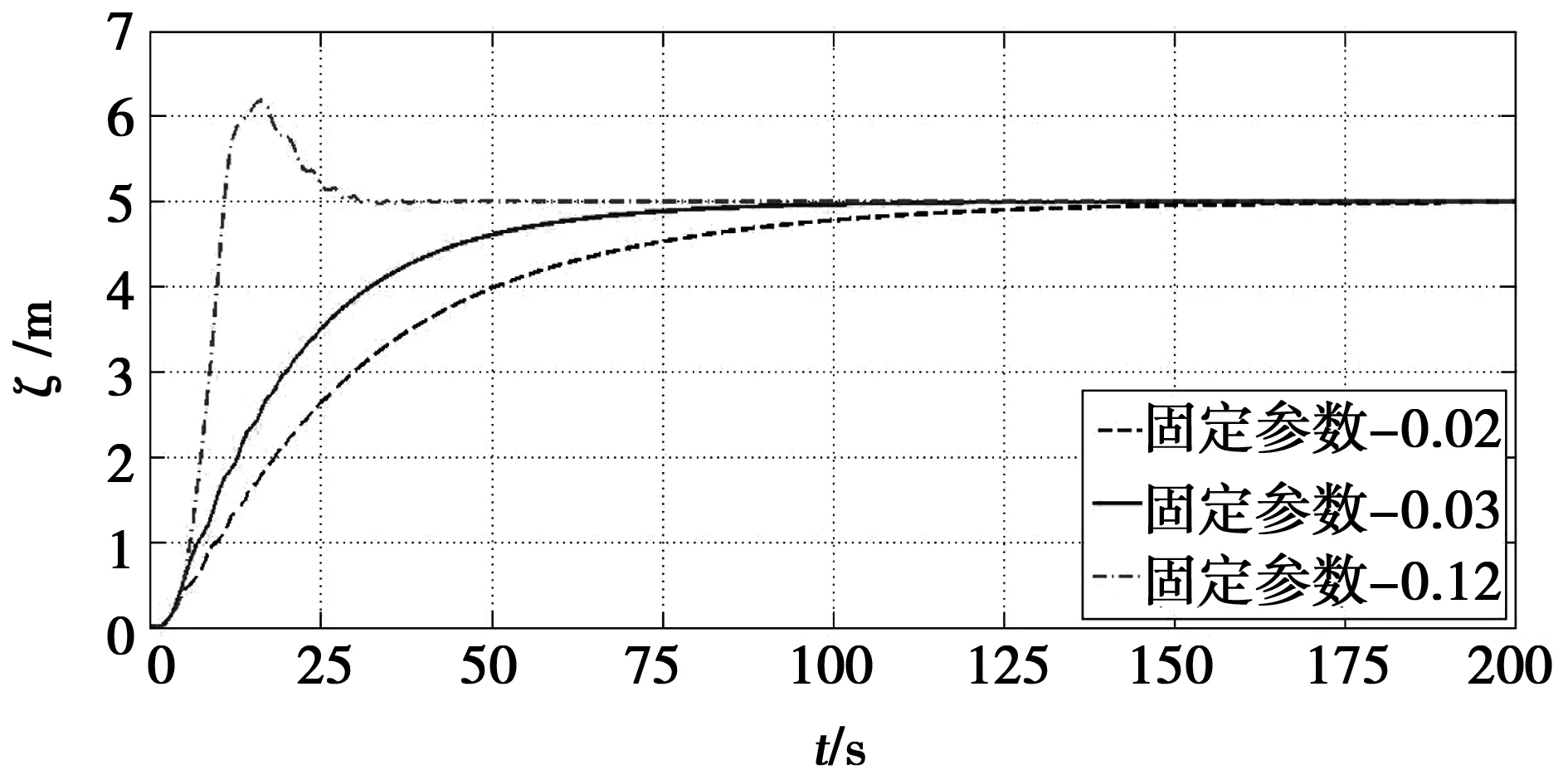
图3 固定参数深度控制Fig.3 Depth control with fixed parameter
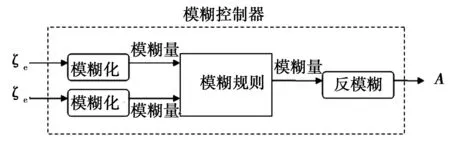
图4 参数A调整方法Fig.4 Adjustment method for parameter A

所建立参数A调整方法,将2.1中跟踪策略进一步完善,因而,欠驱动AUV的自适应地形跟踪策略可表示为图5所示。
3 运动控制器的建立
欠驱动AUV自适应地形跟踪运动控制器的建立结合自抗扰控制方法。自抗扰控制(activedisturbancerejectioncontrol,ADRC)是由中科院系统科学院研究所韩京清研究员提出的一种控制方法,其继承了传统PID“基于误差,消除误差”的思想,并使用新设计的非线性反馈来克服一些传统PID控制的缺点,具有超调小、控制精确度高以及抗扰能力强等特点[9]。主要由跟踪微分控制器、扩张状态观测器、误差的非线性反馈以及扰动估计补偿等部分组成。结合二阶ADRC控制器与AUV的垂直面相关运动参数,建立AUV水平舵控制器如图6所示的信息流框架。
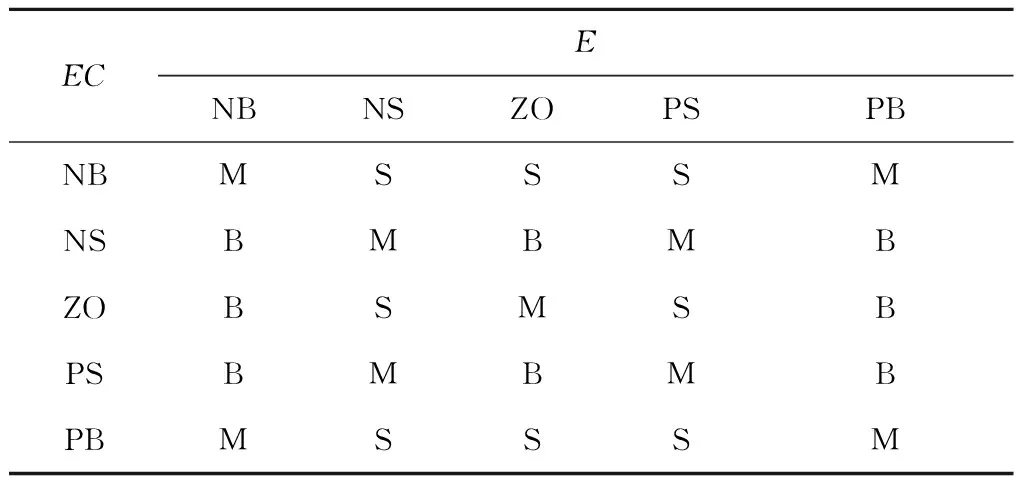
表1 模糊控制规则表
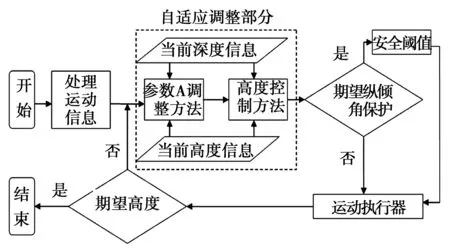
图5 自适应地形跟踪策略图Fig.5 Strategy figure for self-adaptive bottom-following
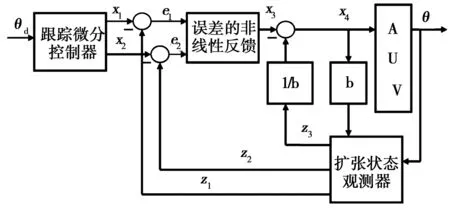
图6 水平舵ADRC运动控制器信息流框架Fig.6 Information flow frame of ADRC motion controller with horizontal rudder
图6中的θd和θ分别为AUV运动过程中的期望纵倾角和AUV当前纵倾角,其它变量为ADRC控制器计算所需的中间变量。跟踪微分控制器、扩张状态观测器、误差的非线性反馈及扰动估计补偿各自都有若干种算法[10]。根据控制需求,将图6中各部分算法分别设计如式(5)~式(8)所示。
跟踪微分控制器:
(5)
式中:r为快速因子,h0为滤波因子,h为积分步长,函数fhan(x1,x2,r,h)的定义为:
扩张状态观测器:
(6)
式中:h为积分步长,β01,β02,β03为增益系数,a为可调参数,且函数fal(e,α,δ)定义为:
误差的非线性反馈
x3=-fhan(e1,e2,r,h)。
(7)
式中:r为快速因子,h为积分步长。
扰动估计补偿
x4=x3-z3×b-1。
(8)
式中b为可调参数。
通过ADRC,可以将纵倾角的控制问题,转化为纵倾角偏差e1和纵倾角偏差变化率e2的镇定问题。主推控制器设计与水平舵控制器类似,可以利用纵向速度与期望速度之间的偏差及偏差变化率作为控制器输入,以控制AUV的工作航速。因而欠驱动AUV的完整自适应地形跟踪控制器信息流框架可以表示为图7。
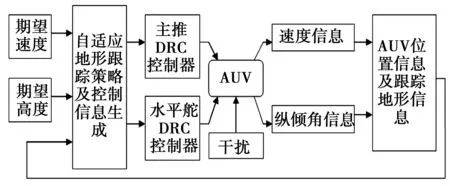
图7 欠驱动AUV自适应地形跟踪控制器信息流框架Fig.7 Controller information flow frame of the underactuated AUVs self-adaptive bottom-following
4 仿真结果和分析

4.1 阶跃跟踪
此部分实验,在无干扰情况下,选用期望跟踪路径为变化的“方波”,目的在于测试2.2中参数A的自适应调整方法的有效性。因而,所选运动执行器的控制器均基于ADRC建立,但是在跟踪策略上不同:一种选用2.1中参数固定的跟踪策略,另一种选用2.2中自适应跟踪策略。设定期望航速为2kn,参数固定跟踪策略的控制参数A=-0.03,起始位置为ζ=5m,则跟踪控制结果如图8所示。
从图8(a)中可看出,两种控制策略均能完成所设定“方波”的跟踪,控制效果均准确,并且在控制过程中无超调的出现,但是在控制的响应时间上,可以看出两者的不同。以20m定深为例,使用自适应跟踪策略控制方法的响应时间为82s,而参数固定跟踪策略控制方法的响应时间则为196s。在此过程中自适应方法的相应时间缩短了1倍多时间。此外,在其它上浮和下潜过程中也有类似结果。使用自适应跟踪策略的控制,由于参数A在AUV运动过程中进行了动态调整和变化,如图8(b),因而控制的响应时间更短,相比而言,具有更优的控制效果。
4.2 地形跟踪
此部分实验,在干扰条件下,跟踪模拟地形,目的在于测试ADRC在结合自适应地形跟踪策略之后的抗干扰能力,因而,分别选用ADRC控制器和工程中广泛应用的PID控制器,但都结合2.2中的自适应跟踪策略进行测试。对于水平舵控制器而言,ADRC方法的控制器参数:跟踪微分控制器,h=h0=0.5,r=0.02;扩张状态观测器,h=0.5,a=0.2,β01=1/h,β02=1/3h2,β03=1/32h3;误差的非线性反馈,h=0.5,r=0.02;扰动估计补偿:b=1。PID方法的控制器参数为KP=5,KI=1,KD=2。干扰为E-ζ方向的随机干扰以及ζ-E方向的瞬时干扰。随机干扰,用于模拟外界环境干扰以及AUV自身的信号传输干扰,添加于整个仿真过程,数值如图9(c)所示;瞬时干扰,用于模拟水底暗涌或喷流等所导致的环境突然变化,添加于t=1 200s,数值为300N。设定期望航速为2kn,纵倾安全阈值设为30°,起始位置为ζ=5m,预先定深20m,在t=500s时,变为保持在期望地形上方10m的跟踪控制。控制结果如图9所示。
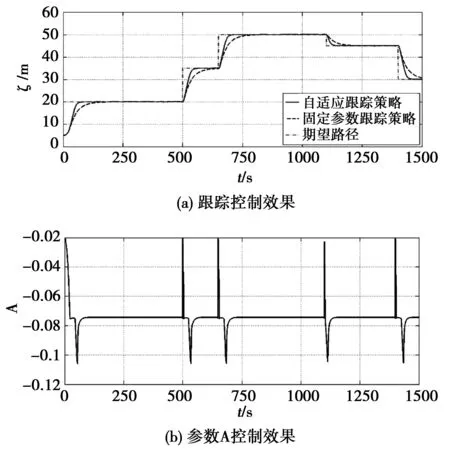
图8 阶跃跟踪结果Fig.8 Step tracking results
结合ADRC和PID的跟踪方法均能完成跟踪任务,面对地形的变化,具有良好的响应能力。但是分别从图9(a)和图9(b)中的局部放大图中可以看出控制效果的不同。ADRC在t=1 210 s时出现的最大跟踪偏差为1.9 m,而PID在此时出现的最大跟踪偏差则为2.8 m。在此仿真过程中,相同干扰下,ADRC比PID方法的跟踪偏差减小了近1 m。说明结合ADRC的自适应地形跟踪控制方法能够更好的抑制瞬时干扰造成的超调。对于控制过程中纵倾角的变化,从图9(b)可知,结合ADRC的跟踪方法,在控制过程中要更加平滑,而不同于PID控制的震荡效果。出现这种情况的原因是PID控制器对于随机干扰过于敏感造成的。
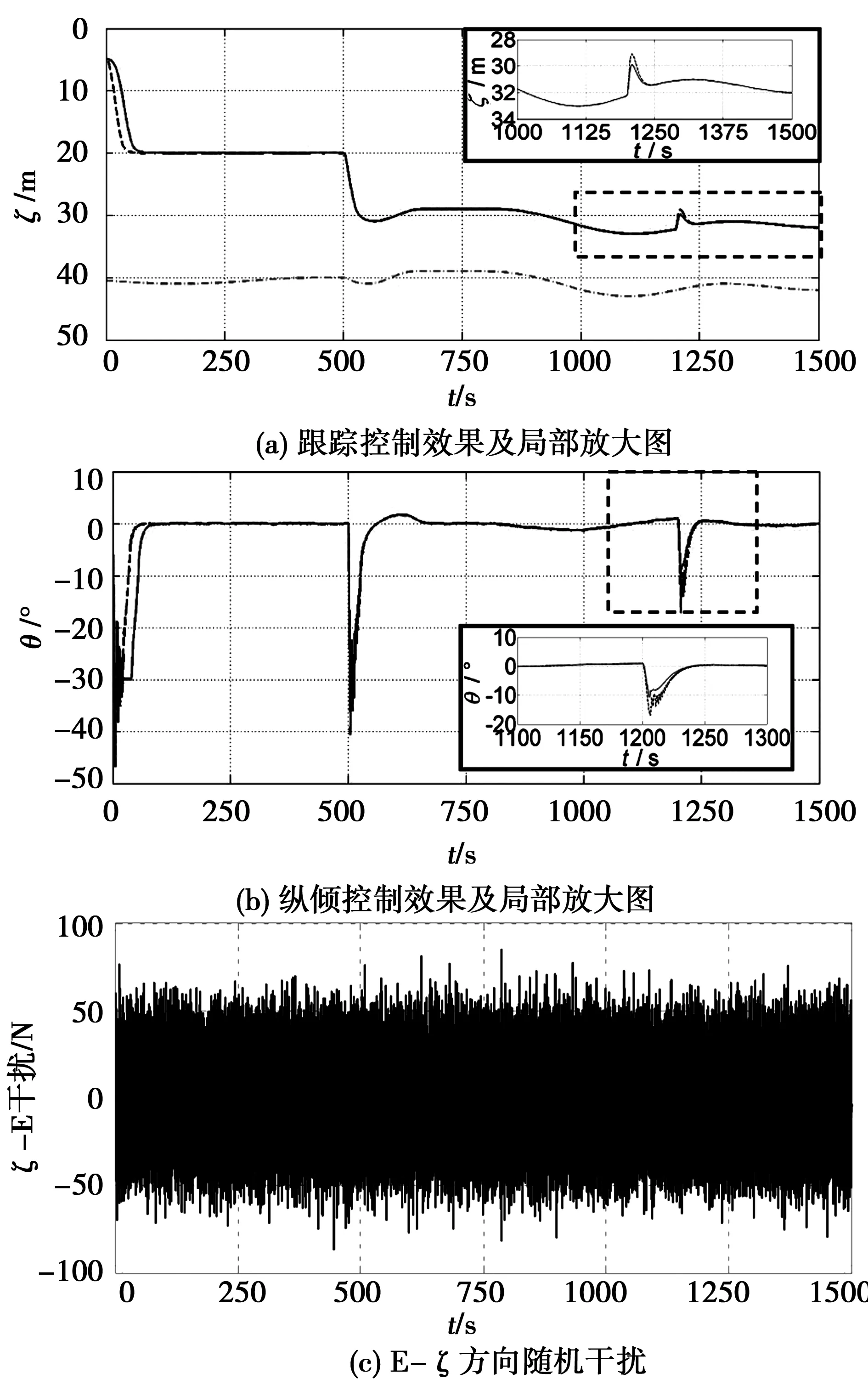
图9 地形跟踪结果及E-ζ 方向干扰Fig.9 Results of bottom-following control and disturbance in E-ζ注:实线:ADRC;虚线:PID;点划线:跟踪地形
5 结 论
两组对比实验的结果表明,本文所设计的欠驱动AUV自适应地形跟踪方法,结合了模糊控制思想的灵活性以及自抗扰控制方法对干扰的抑制能力等优点。在控制过程中具有良好的响应效果,对于提高欠驱动AVU的行为能力方面具有一定的意义。当然,对于本文所设计的方法,在模糊控制规则的设计时,还需结合具体任务,在控制的“快速性”、控制“准确性”以及控制载体的运动能力等3个方面进行平衡,以期获得最优效果。
[1] 王芳,万磊,李晔.欠驱动AUV的运动控制技术综述[J].中国造船,2010,51(2):227-241. WANG Fang,WAN Lei,LI Ye. A survey on development of motion control for underactuated AUV[J]. Shipbuilding of China,2010,51(2):227-241.
[2] SILVESTRE C,CUNHA R,PAULINO N,et al.A bottom-following preview controller for autonomous underwater vehicles[J]. IEEE Transactions on Control Systems Technology.2009,17(2):257-266.
[3] 万磊,崔士鹏,张国成,等.欠驱动水下机器人航迹跟踪控制[J].电机与控制学报,2013,17(2):103-111. WAN Lei,CUI Shipeng,ZHANG Guocheng,et al.Path following control of underactuated autonomous underwater vehicles[J]. Electric Machines and Control.2013,17(2):103-111.
[4] 周焕银,刘开周,封锡盛.基于神经网络的自主水下机器人动态反馈控制[J].电机与控制学报,2011,15(7):87-93. ZHOU Huanyin,LIU Kaizhou,FENG Xisheng. Dynamic feedback control based on ANN compensation controller for AUV motions[J]. Electric Machines and Control.2011,15(7):87-93.
[5] 刘云龙,高存臣,任启峰,等.水下机器人基于sigmoid函数的软变结构控制[J].电机与控制学报,2012,16(2):90-95. LIU Yunlong,GAO Cunchen,REN Qifeng,et al. Soft variable structure control based on sigmoid functions for autonomous underwater vehicles[J]. Electric Machines and Control.2012,16(2):90-95.
[6] 贾鹤鸣,宋文龙,周佳加.基于非线性反步法的欠驱动AUV地形跟踪控制[J].北京工业大学学报,2012,38(12):1780-1785. JIA Heming,SONG Wenlong,ZHOU Jiajia. Bottom following control for an underactuated AUV based on nonlinear backstepping method[J]. Journal of Beijing University of Technology.2012,38(12): 1780-1785.
[7] MELO J,MATOS A.Bottom estimation and following with the MARES AUV[C]// OCEANS 2012 MTS/IEEE: Harnessing the Power of the Ocean. United States: IEEE Computer Society,2012:1-8.
[8] 李岳明,万磊,孙玉山,等.水下机器人高度信息融合与欠驱动地形跟踪控制[J].控制理论与应用,2013,30(1):118-121. LI Yueming,WAN Lei,SUN Yushan,et al.Altitude information fusion and bottom- following control for underactuated autonomous underwater vehicle[J]. Control Theory and Applications.2013,30(1):118-121.
[9] ADHAMI M A,YAZDANPANAH M J,AGUIAR A P.Automatic bottom-following for underwater robotic vehicles[J]. Automatica,2014,50(8):2155-2162.
[10] 施生达.潜艇操纵性[M]. 北京:国防工业出版社,1995.
[11] 李士勇.模糊控制[M]. 哈尔滨:哈尔滨工业大学出版社,2011.
[12] 韩京清.自抗扰控制器及其应用[J]. 控制与决策,1998,13(1):19-23. HAN Jingqing. Active disturbance rejection controller and its application[J]. Control and Decision.1998,13(1): 19-23.
[13] 韩京清.自抗扰控制技术—估计补偿不确定因素的控制技术[M]. 北京:国防工业出版社,2009.
(编辑:贾志超)
Underactuated AUV′s bottom-following control based on self-adaptive method
BAI Ji-song, PANG Yong-jie, WAN Lei, ZHANG Ying-hao, ZHANG Qiang
(Science and Technology on Underwater Vehicle Laboratory,Harbin Engineering University,Harbin 150001,China)
To ensure that an underactuated autonomous underwater vehicle(AUV)has better control ability in the bottom-following task,one self-adaptive bottom-following control method is designed,which can decrease the influence of the environment disturbance. Firstly,made a structure analysis for one underactuated AUV,and built the corresponding kinematics and dynamics models. Secondly,offered one self-adaptive bottom-following strategy combined with fuzzy control,and designed the motion controller by active disturbance rejection control(ADRC).Finally,made two contrast simulations to evaluate the effectiveness of the designed method. The control results show that the self-adaptive bottom-following control method has a good response capability. And compared with PID,it has better control precision under the influence of interference. The research of this control method has certain significance in improving underactuated AUV’s intelligence under the bottom-following task.
control science and technology; autonomous underwater vehicle; underactuated; bottom-following control; self-adaptive; fuzzy control; active disturbance rejection control
2016 -07-01
国家自然科学基金(51309066)
白继嵩(1985—),男,博士研究生,研究方向为水下机器人环境感知技术; 庞永杰(1955—),男,博士,教授,博士生导师,水下机器人总体技术; 万 磊(1964—),男,研究员,博士生导师,研究方向为机器人总体规划和系统集成技术; 张英浩(1987—),男,博士研究生,研究方向为水下机器人控制技术; 张 强(1981—),男,博士,讲师,研究方向为水下机器人控制技术。
白继嵩
10.15938/j.emc.2017.06.011
TM 312
A
1007-449X(2017)06-0083-06
猜你喜欢
汽车实用技术(2022年7期)2022-04-20
房地产导刊(2020年11期)2020-12-28
铁道通信信号(2019年4期)2019-10-10
通信电源技术(2016年1期)2016-04-16
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28
自动化博览(2014年4期)2014-02-28
