
高分辨率遥感影像中云和似云目标的自动区分
2017-07-05 15:23李爱勤王环东王静怡胡翔云
测绘通报 2017年6期
李爱勤,王环东,王静怡,胡翔云
(1. 浙江省测绘科学技术研究院,浙江 杭州 310000; 2. 武汉大学遥感信息工程学院,湖北 武汉 430079)
高分辨率遥感影像中云和似云目标的自动区分
李爱勤1,王环东2,王静怡2,胡翔云2
(1. 浙江省测绘科学技术研究院,浙江 杭州 310000; 2. 武汉大学遥感信息工程学院,湖北 武汉 430079)
云的存在会对遥感影像的处理及目标识别等产生影响,因此,自动提取云对高分辨率卫星影像的应用具有重要意义。高分影像上更加复杂的云的细节形态及似云目标的干扰,使得高分影像的自动云提取难以达到实用水平。本文以雪地为例,选取形状、纹理和边缘3个差异化特征作为云与似云目标区分的关键,提出了一种区分高分辨率遥感影像中云和似云目标的云检测算法。首先利用Wallis滤波对输入影像进行预处理,增强影像中不同尺度的影像纹理模式;然后对影像进行快速稳定的均值漂移分割,利用灰度和纹理特征构成支持向量机的第一层分类器,将分割后的区域对象分成“云”和普通地物,再利用边缘、形状、纹理等特征结合灰度特征构成支持向量机的第二层分类器,将“云”区分为云区和似云目标;最后使用Grab-cut对云检测结果进行边缘迭代精化。本文算法取得了优良的试验结果,证明了算法在似云目标干扰下对高分辨率遥感影像进行精确云检测的能力。
云检测;似云目标;支持向量机;均值漂移分割
云的存在给遥感解译带来极大不便,对图像分析产生重要影响,薄云还会使图像中部分像素混杂着地物和云层信息,使影像分割变得困难,信息提取产生错误。云检测作为影像预处理的重要步骤,对遥感影像尤其是高分辨率遥感影像的应用具有重要价值。而似云目标如冰、雪、沙漠及部分建筑物等,由于其高分辨与云相似,会给云检测带来许多干扰。因此,进行高分辨遥感影像云检测中的云和似云目标区分的方法研究对于提高云检测正确率意义重大。现有的遥感影像云检测方法主要可以分为利用云和地物多光谱物理特性差异的物理方法[1-4]、基于云的空间纹理的检测方法[5-8]、运用模式识别的检测方法[9-11]及综合使用多种方法对云检测进行效果优化的综合优化方法。物理方法计算简单,能较好地区分云和似云目标,其缺点在于阈值的确定及应用范围的有限。空间纹理特征法具有适应范围广的优势,但由于下垫面的复杂性及似云目标的干扰,仅使用空间纹理特征并不能较好地区分似云目标和云区。模式识别方法打破了影像本身对云检测的约束,它通过特征提取整合影像中目标的光谱信息和空间信息,从而形成了一套行之有效的通用云检测机制,其难点主要在于合适的特征组合及样本集的选择。综合优化方法则往往能取得优于单一方法的检测结果。由于高分辨率遥感影像上地物种类繁多,无论是哪一类云检测方法都可能将似云目标误分为云,因此对云和似云目标进行自动区分意义重大。
本研究针对高分辨率遥感影像,以对象分析为基础,提出一种有效的云检测方法,同时针对影像上与云相似的下垫面,如冰、雪或沙漠等,利用机器学习的方法,选取合适特征,实现云区与似云目标的区分,提高如冰川、高原等特殊区域的云检测正确率。
1 云和似云目标的自动区分
本文提出的高分辨率影像云检测算法分为影像预处理、影像分割、特征提取、云检测及似云目标判别及结果精化5个步骤。算法流程如图1所示。

图1 云检测算法流程
由于遥感影像上的云相对于大多数地物具有亮度较高、纹理较少等特点,通过简单的分类就能区分出大多数的云区,但与此同时也会将大部分的高亮地物误分为云。针对这一特点,本文设计了双层分类器,第一层分类器用于“云”和普通地物的分类,第二层分类器用于将“云”分成云区和似云地物。
1.1 影像预处理
Wallis滤波器在遥感影像处理尤其是目标识别、影像匹配等领域常常被应用[12]。它可以抑制影像噪声,提升影像反差,增强图像在不同尺度下的纹理细节。本文中,为了提升后续影像分割和特征提取的效果,选用Wallis滤波对输入影像进行去噪和细节增强。
Wallis滤波器的一般形式为
gw(x,y)=g(x,y)·r1+r2
(1)
其中
r1=c·sf/(c·sg+sf/c)
r0=b·mf+(1-b-r1)·mg
式中,gw(x,y)和g(x,y)分别为滤波后影像与原始影像的灰度信号;r1和r0分别为乘性系数与加性系数,当r1>1时,该变换是一高通滤波,当r1<1时,该变换为一低通滤波;mg和sg分别为某一像素在一定邻域的灰度均值和方差;mf和sf分别为影像均值和方差的目标值;b为影像反差扩展系数;c为影像亮度系数[13]。
Wallis滤波效果如图2所示,可以发现Wallis滤波在暗部细节进行进一步提升的同时,对影像亮部(主要是云区)同样进行了亮度和细节的提升,并且保证在不出现曝光过度的范围之内。

图2 Wallis滤波效果(局部)
1.2 影像分割
影像分割是利用特征将影像分割成若干互不相交的区域,使每个区域具有独立一致性,而相邻区域间的差别尽可能大。在云检测中,笔者希望影像分割能较好地快速将云和地物分割开来,在保证各区域内部一致性的同时,尽量保证对象的完整性。本文选取均值漂移(mean shift)算法来进行影像分割。
利用mean shift算法对全色影像进行影像分割试验的结果如图3所示。
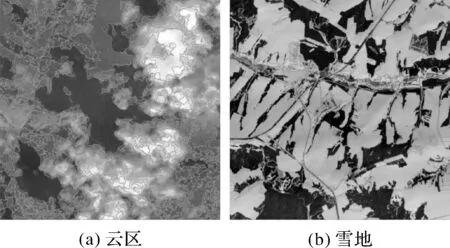
图3 mean shift影像分割结果
可以看到,mean shift算法对复杂地物表面分割较为细碎,对云区会按照云层顶部层次分割为不同的区域,对云区形成的巨大阴影则分割为一块完整的区域,对雪地的分割虽然边缘较为粗糙,但较好地保持了每块雪地的完整性,能够满足需求。
1.3 特征提取
特征提取是能够成功区分出云和似云特征的关键。云形态多变、边界模糊和背景复杂这3个特点,给云检测带来了不小的困难。因此,提取出的特征必须足够丰富,能充分描述云的各种形态下的特点,而模糊的边界也可以成为区分云区和似云地物的特征之一,而云背景的复杂性则要求采取多层分类结构来对云区逐次进行提取。
1.3.1 灰度特征
灰度均值和灰度方差可用于描述影像整体的亮度和纹理。灰度16维直方图则将灰度信息组织为16维特征,能提供比灰度均值更多的影像信息。
1.3.2 纹理特征
灰度方差及灰度共生矩阵是研究图像纹理特征的有效手段,在遥感领域应用广泛。常用于云检测的灰度共生矩阵二次统计量包括二阶矩(能量)、对比度(惯性矩)、相关性(同质性)和熵[14]。
LTP(local trinary pattern)是LBP描述子的一种改进方案。LTP算子的编码规则定义如下
(2)

(3)
式中,nc表示中心像素点(u,v)的灰度值;ni表示等间隔地分布在以(u,v)为圆心、R为半径的圆上的N个领域点的灰度值;T为阈值。
对于纹理缺乏、灰度分布均匀的区域,LTP算子比LBP算子在噪声环境之下具有更稳定的能力,因为LTP能携带更多的信息,表示更多模式。对于带噪声的灰度分布均匀区域和纹理变化较大的区域,LBP算子由于描述能力有限,不能将它们区分开,而LTP算子可以发挥三值编码的优势将它们区分开[15]。
1.3.3 形状特征
分形维数是一种数学方法,主要用于对自然界复杂的几何形体进行研究。分形的核心特点是自相似性,即自身与自身的某一部分相似。盒维数算法经常用于灰度图像,其定义为:
设F为RN上任意非空的有界子集,Nδ(F)为直径最大为δ的可以覆盖F的集的最小个数,则F的上、下盒维数分别定义为
(4)
(5)
若式(4)与式(5)相等,则称这两个共同的值为F的盒维数,记为
(6)
1.3.4 边缘梯度
云区边缘一般是模糊的,即使是具有层次的积状云顶部,每层之间的边缘同样呈现缓慢过渡的趋势。而似云地物如雪地一般具有较为清晰的边缘。
为了更好地区分云和雪,本文专门设计了一种边缘梯度的特征,定义如下:
设(x,y)为图像分割后图块的边缘像素点,G(x,y)为对应(x,y)的灰度值,D为边缘梯度的最大值,则
(7)
式中,i∈{-k+1,-k+2,…,-1,0,…,k-1,k},一般取k=2。计算得到的D1、D2、D3、D4分别为0°、45°、90°和135°方向的边缘梯度最大值。边缘梯度越大,说明该边缘清晰的概率越高。
1.4 云检测和似云目标判别
本文使用支持向量机(SVM)作为分类器。云检测和似云目标判别使用了双层分类器,第一层分类器用于“云”和普通地物的分类,第二层分类器用于将“云”分为云区和似云地物。通过对不同特征组合进行试验,选择灰度均值、16维灰度直方图、方差、加权LTP描述子的特征组合作为第一层分类器;对于第二层分类器,则使用灰度均值、16维灰度直方图、灰度共生矩阵(能量、对比度、相关性、熵)、加权LTP描述子、边缘梯度和盒维数的特征组合。
1.5 结果精化
Grab-Cut是Graph-Cut算法的改进和发展,它首先通过迭代的“图割”算法提取出前景的大致轮廓,再通过边界精化算法对提取出的轮廓进行优化[16]。
由于mean shift分割的区域边缘较为粗糙,云检测之后需要对检测结果进行进一步的精化。因此,本文将上面4个步骤生成的结果作为程序的初始值,利用Grab-Cut对结果进行进一步的精化。
2 试验结果与分析
本文选用OrbView-3高分辨率全色遥感影像(分辨率为1 m),建立样本集。样本示例分别如图4和图5所示。
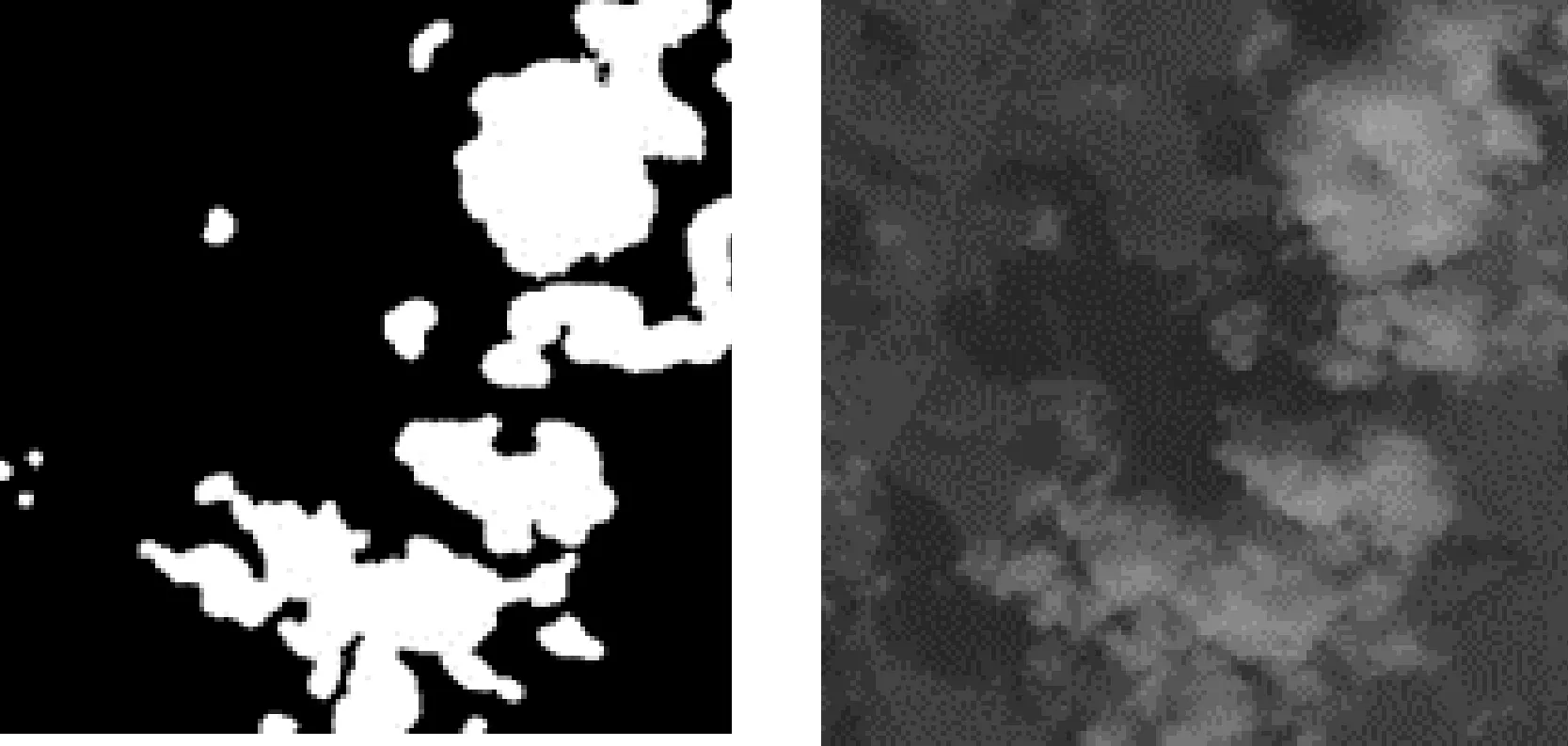
图4 云区样本及真值示例

图5 雪地样本及真值示例
检测结果分别如图6和图7所示。针对存在似云目标干扰的高分辨率遥感影像,本文提出的云检测方法达到了95.65%的准确率与94.03%的召回率,充分证明了该算法能够实现对云区和似云目标的自动区分,从而实现了高精度的云检测,提升了在似云目标干扰下云检测算法的鲁棒性。
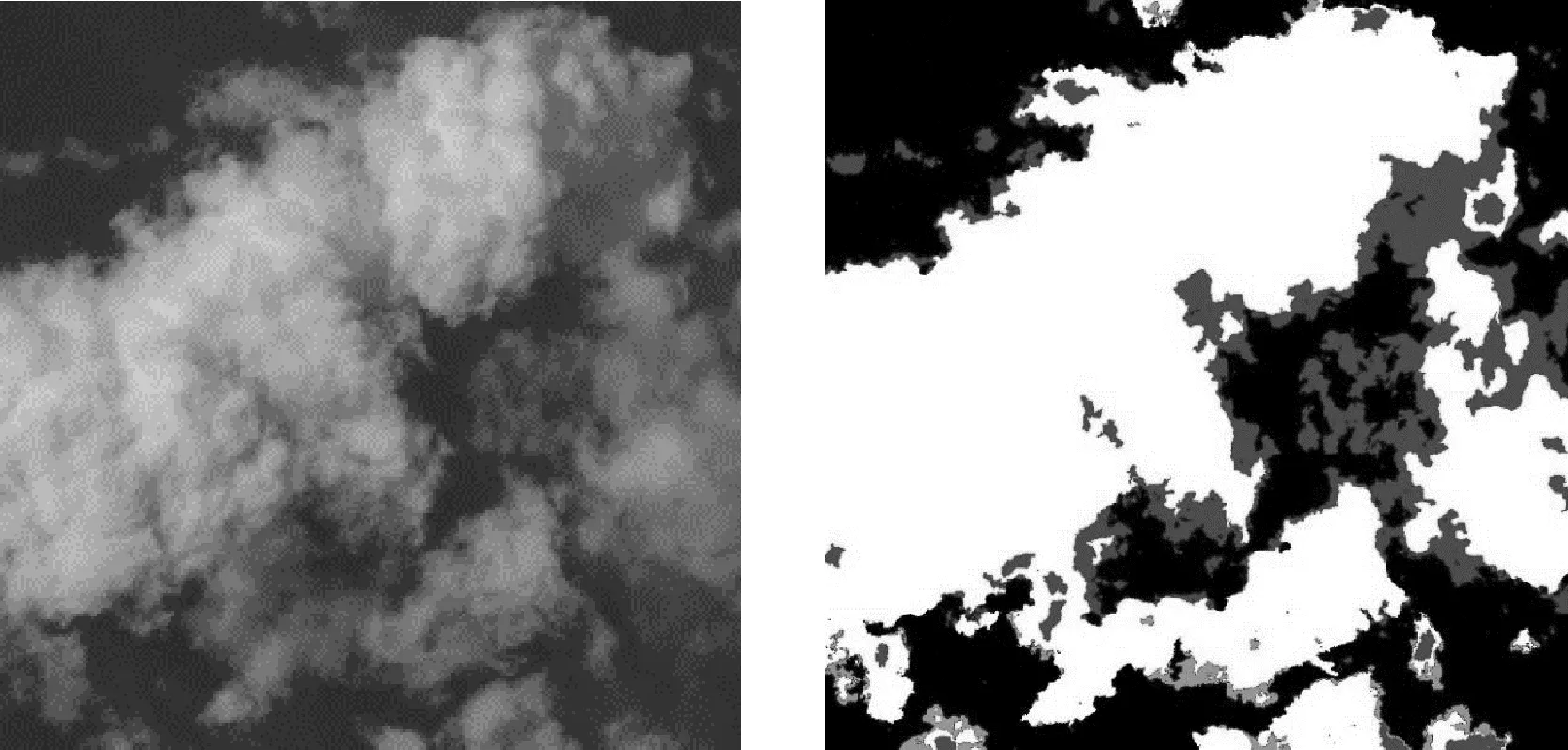
图6 云区检测结果(无雪地干扰)

图7 云区检测结果(存在雪地干扰)
3 结 语
本文使用双层支持向量机分类结构,设计了针对云和似云目标的边缘特征——边缘梯度,并且对特征选择进行了大量试验,对技术框架包括双层分类器和Grab-Cut的使用进行了验证。在对OrbView-3全色影像的云检测试验中,发现本文算法取得了较为优良的试验结果。这表明本文的特征选择和技术框架是高分辨率遥感影像云检测中的云和似云目标区分的一种可行方案。今后将在本文的基础上,引入更多有效特征来应对更加复杂的云检测场景。
[1] 李艳兵,李元祥,翟景秋.卫星云图形态特征提取和表示的一种方法[J].南京气象学院学报,2006,29(5): 682-687.
[2] LI W, LI D. The Universal Cloud Detection Algorithm of MODIS Data[C]∥Proceedings of SPIE, the International Society for Optical Engineering.[S.l.]:Society of Photo-Optical Instrumentation Engineers, 2006.
[3] WU X,CHENG Q.Study on Methods of Cloud Identification and Data Recovery for MODIS Data[C]∥Remote Sensing.[S.l.]:International Society for Optics and Photonics,2007.
[4] ZHU Z, WOODCOCK C E. Object-based Cloud and Cloud Shadow Detection in Landsat Imagery[J]. Remote Sensing of Environment, 2012, 118: 83-94.
[5] SOLVSTEEN C. Correlation-based Cloud Detection and an Examination of the Split-window Method[C]∥Satellite Remote Sensing II.[S.l.]:International Society for Optics and Photonics, 1995.
[6] 曲卫平,刘文清,刘建国, 等.应用单波段亮度变化率获取无云干扰的卫星数据[J].光谱学与光谱分析,2006,26(11): 2011-2015.
[7] 陈鹏,张荣,刘政凯.遥感图像云图识别中的特征提取[J].中国科学技术大学学报,2009, 39(5): 484-488.
[8] 单娜,郑天垚,王贞松.快速高准确度云检测算法及其应用[J].遥感学报,2009(6): 1138-1155.
[9] AZIMI-SADJADI M R, SHAIKH M A, TIAN B, et al. Neural Network-based Cloud Detection/Classification Using Textural and Spectral Features[C]∥Geoscience and Remote Sensing Symposium.[S.l.]:IEEE, 1996.
[10] YUAN Y, HU X. Bag-of-words and Object-based Classification for Cloud Extraction from Satellite Imagery[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2015, 8(8): 4197-4205.
[11] HU X, WANG Y, SHAN J. Automatic Recognition of Cloud Images by Using Visual Saliency Features[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(8): 1760-1764.
[12] 张力,张祖勋,张剑清. Wallis 滤波在影像匹配中的应用[J].武汉测绘科技大学学报,1999,24(1): 24-27.
[13] 王博,张永军,陈奇.一种改进的自适应 Wallis 滤波算法[J].测绘科学,2015,40(5): 95-98.
[14] 曹琼,郑红,李行善.一种基于纹理特征的卫星遥感图像云探测方法[J].航空学报,2007, 28(3): 661-666.
[15] 曾慧,穆志纯,王秀青.一种鲁棒的图像局部特征区域的描述方法[J].自动化学报,2011, 37(6): 658-664.
[16] ROTHER C, KOLMOGOROV V, BLAKE A. Grabcut: Interactive Foreground Extraction Using Iterated Graph Cuts[C]∥ACM Transactions on Graphics (TOG).[S.l.]:ACM, 2004.
Automatic Discrimination of Cloud and Cloud-like Target in High Resolution Satellite Imagery
LI Aiqin1,WANG Huandong2,WANG Jingyi2,HU Xiangyun2
(1. Zhejiang Surveying and Mapping Science and Technology Research Institute, Hangzhou 310000, China; 2. School of Remote Sensing and Information Engineering, Wuhan University, Wuhan 430079, China)
Clouds in remote sensing imagery have an impact on its process and subsequent target recognition. Thus, automatic cloud extraction is essential to the application of high-resolution imagery. The complex shapes of the clouds in high-resolution imagery and the interference of cloud-like targets make it difficult to achieve a practical automatic cloud extraction. In this paper, we choose snow as the example of cloud-like target, and develop an algorithm which chooses shape, texture and edge as the key features to discriminate cloud from cloud-like targets. Firstly, the input image is preprocessed with Wallis filtering to enhance texture patterns at different scales. Then the input is segmented by a fast stable mean-shift segmentation. The first support vector machine classifier is built with gray and texture features, which divides all segmented parts into “cloud” and common ground targets. A second classifier is built with edge, shape and texture features to divide “cloud” areas into clouds and cloud-like targets. Finally, Grab-cut is applied to refine edges of cloud extraction results iteratively. Experiments achieve good results and demonstrate the algorithm’s capability to extract clouds in high-resolution imagery precisely with the interference of cloud-like targets.
cloud detection; cloud-like target; SVM; mean shift
李爱勤,王环东,王静怡,等.高分辨率遥感影像中云和似云目标的自动区分[J].测绘通报,2017(6):31-35.
10.13474/j.cnki.11-2246.2017.0184.
2016-11-15;
2017-02-06
浙江省科技技术项目(2015C33010)
李爱勤(1967—),男,教授级高级工程师,主要研究方向为测绘遥感与地理信息。E-mail:aqli_cn@126.com
胡翔云
P237
A
0494-0911(2017)06-0031-05
猜你喜欢
计算机系统应用(2021年2期)2021-02-23
软件(2020年3期)2020-04-20
电子技术与软件工程(2019年18期)2019-11-18
摄影之友(影像视觉)(2018年12期)2019-01-28
电子技术与软件工程(2017年14期)2017-09-08
Coco薇(2017年8期)2017-08-03
Coco薇(2015年5期)2016-03-29
航天返回与遥感(2014年5期)2014-07-31
