双向飞翼空天飞行器概念外形研究
2017-07-03 16:08:48刘晓斌徐柯哲朱国祥
空气动力学学报 2017年3期
刘晓斌, 徐柯哲, 朱国祥
(北京空天技术研究所,北京 100074)
双向飞翼空天飞行器概念外形研究
刘晓斌, 徐柯哲, 朱国祥*
(北京空天技术研究所,北京 100074)
空天飞行器飞行速域宽,气动外形需同时考虑起飞高升力与超/高超声速高升阻比需求,给飞行器的气动布局设计带来很大难度。双向飞翼飞行器概念具有两个互相垂直的对称面,在亚声速时以大展弦比模态飞行,可获得足够的升力,超/高超声速时以小展弦比模态飞行,可尽量降低激波阻力,飞行模态转换的转换通过机身旋转90°实现,可能解决宽速域高升阻比设计矛盾。本文据此构建了一种双向飞行空天飞行器外形,并开展了CFD数值仿真。结果表明,与Sanger类常规布局的空天飞行器相比,双向飞翼概念外形的亚声速时最大升阻比为16,提升30%~50%;高超声速段升阻比性能基本相当,最大升阻比4,说明该外形是一种有潜力的空天往返飞行器方案。在此基础上,从飞行器技术实现角度,系统梳理了双向飞翼飞行器方案面临的三大技术难点,并提出了可行的解决途径或可能的攻关方向。针对飞行器纵向静不稳定度偏大问题,提出调整机身平面形状和剖面形状等,可使静不稳定度降低至10%以内;针对飞行模态转换控制困难问题,创新性地提出了一种基于非对称垂尾的控制方法,在飞行器两个飞行模态下各安置一片垂尾,在提供了足够的模态转换控制力矩的同时,改善了飞行器的横航向稳定性;针对发动机耦合设计问题,提出了一种新的涡轮和火箭发动机独立垂直布置的方法,降低了空天飞行器对组合动力技术的依赖性,有助于双向飞翼空天飞行器的早日实现。
双向飞翼;空天飞行器;高升阻比;稳定性;飞行模态转换
0 引 言
随着超燃冲压发动机和机体/推进一体化技术的不断发展,发展空天往返飞行器已经成为当前研究的热点,是高超声速技术进一步发展的必然方向。该类飞行器要求具有尽可能高的亚/跨/超/高超声速升阻比特性,兼顾起降段最大升力特性以及宽速域下的稳定性、控制性,对飞行器的外形设计提出了新的挑战。
对于需跨亚/跨/超/高超声速飞行的空天飞行器而言,变后掠翼可能是解决高/低速条件下高升阻比外形需求矛盾问题的一种途径,它可以显著改善起降及高速飞行阶段的气动性能;但变形过程将带来飞行器压心的急剧变化,增大了控制难度;同时,实现变后掠往往需要复杂的控制结构,由此使得飞行器的需用容积和重量增加,考虑到空天飞行器对于结构质量占比要求极为苛刻,变后掠翼可能并非空天飞行器的最佳方案。
“双向飞翼”概念可能是解决飞行器宽速域气动特性需求矛盾的有效途径,它最早由美国迈阿密大学查葛城教授提出[1]。其平面基本外形近似为菱形:亚声速状态下,飞行器以大翼展比姿态飞行,以保证足够的升力;超声速状态下,飞行器以小翼展比姿态飞行,以降低激波阻力;高、低速飞行模态的转换通过飞行器90°实现,如图1所示。
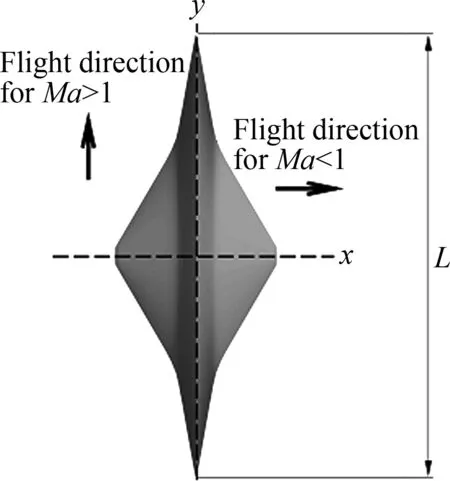
图1 “双向飞翼”超声速飞行器概念图Fig.1 Supersonic bi-direction flying wing vehicle
概念提出后,国内外对该布局形式进行了一定研究[3-8]。Zha G C等[1]通过数值仿真给出了双向飞翼超声速客机的基本气动特性与音爆特征,指出双向飞翼飞行器在亚/跨声速均具有良好的气动特性和音爆特性。李占科[7]等人初步分析了双向飞翼平面形状和剖面形状对激波阻力的影响,指出细长的平面几何形状对双向飞翼大/小展弦比两种飞行模态下的低阻力设计都非常有利。杨威对机身旋转的飞行模态转换方案开展了非定常过程气动特性分析,指出当旋转角速度较小时,飞行器周围流场的非定常效应较弱,可以按准定常过程处理。但上述研究多集中于概念层面,并且对实现空间装载与气动性能的匹配设计、飞行模态转换等的研究相对薄弱;另一方面,研究主要集中于超声速客机方面,对飞行空速域范围更大、动力系统复杂、气动热环境严酷的空天飞行器的应用研究较少。 本文结合水平起降高超声速飞行器的总体装载和动力系统需求,构建了基于双向飞翼的飞行器概念外形,计算并验证了飞行器在宽速域条件下的升阻比特性。在此基础上,从飞行器的技术实现角度出发,系统梳理了双向飞翼飞行器面临的技术难题,如亚声速纵向静不稳定度过大、飞行模态转换实现难度大、飞行器/发动机耦合难度大等,通过分析给出解决途径或攻关方向,其中创新性地提出了一种新型的非对称垂尾控制方法和一种新型发动机组合布置形式,为双向飞翼空天飞行器的实用化提供技术支撑。
1 概念外形构建
结合总体技术指标需求,初步完成了飞行器的概念外形,如图2所示。飞行器外轮廓尺寸为25 m×10.5 m×1 m。低速大展弦比外形,内侧前缘后掠角34°,外侧机翼前缘后掠角13°,名义展弦比2.38;高速小展弦比外形,内侧前缘后掠角77°,外侧机翼前缘后掠角56°,名义展弦比0.42。
飞行器的飞行轨迹示意如图3所示。飞行器以大展弦比模态在马赫数0.3起飞并加速至高亚声速,在马赫数0.8时完成飞行模态转换,并以小展弦比模态实现超/高超声速飞行;此后减速降落,在马赫数0.8时再一次飞行模态转换,以大展弦比模态降落。

图2 双向飞翼空天飞行器概念外形图Fig.2 Bi-direction flying wing space shuttle concept

图3 双向飞翼空天飞行器飞行轨迹示意图Fig.3 Trajectory of bi-direction flying wing vehicle
2 计算方法说明
本文主要借助数值仿真手段分析飞行器的基本气动特性。使用Fluent求解RANS方程组,求解器选择为基于密度求解器、AUSM通量格式,湍流模型选择为SSTk-ω模型,离散格式采用二阶迎风格式。计算采用的相关设置经过亚跨声速标模DPW-V和高速风洞验证[9-10],如图4所示,计算精度良好。

(a) DPW-V标模阻力特性算例

(b) 高速标模升阻比特性算例图4 计算方法验证算例与验证精度说明Fig.4 Validation and accuracy of computing method
计算参考面积为飞行器法向投影面积114.2 m2,参考长度选择低速大展弦比姿态下的机身长度10 m。
3 飞行器宽速域升阻比特性分析
图5分别给出了飞行器在亚声速(Ma=0.6)、超声速(Ma=1.5)和高超声速(Ma=6.0)时的升/阻力系数随攻角的变化曲线,其中亚声速计算模型为大展弦比模态,超/高超声速计算模型为小展弦比模态。
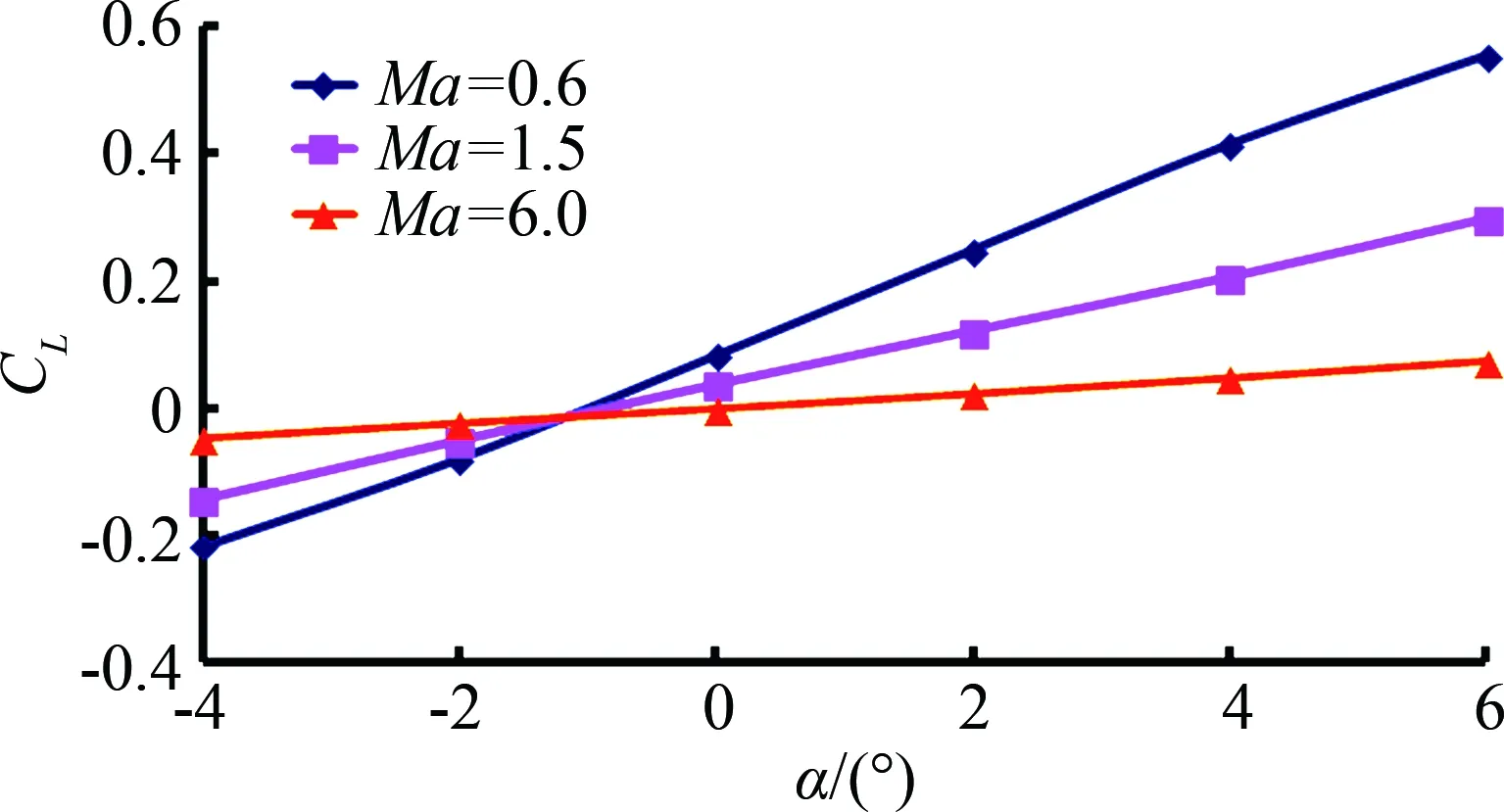
(a) 升力系数特性

(b) 阻力系数特性图5 双向飞翼空天飞行器宽速域升阻特性分析Fig.5 Aerodynamic characteristics of bi-directional flying wing vehicle
从升力系数特性对比图中可以看出:同一攻角下,亚声速升力系数约为高超声速状态下的7~10倍,而空天飞行器在高超声速飞行时的动压大约是亚声速时的5~10倍,意味着较常规飞行器而言,双向飞翼布局的不同速域动压/攻角匹配设计裕度更大,适合宽速域飞行。
图6给出的双向飞翼飞行器升阻比特性随升力系数的变化规律也证实了这一点。图中,各速域下的设计点定义为满足飞行器升重平衡点。可以看出,飞行器在各速域下设计点均位于飞行器最大升阻比位置附近,意味着双向飞翼具有高的使用升阻比。

图6 双向飞翼空天飞行器设计点升阻比分析Fig.6 Lift-drag ratio of bi-directional flying wing vehicle at designed point
图7给出了双向飞翼空天飞行器在不同马赫数下的最大升阻比,并与典型固定几何飞行器Sanger进行了对比[11]。从图中可以明显看出,两种布局在高超声速段的最大升阻比均为4左右,但双向飞翼飞行器在亚声速时最大升阻比可达20,较Sanger飞行器大1倍以上,具有一定优势。

图7 双向飞翼与固定几何飞行器最大升阻比对比Fig.7 Comparison between bi-directional flying wing vehicle and convention aircraft
综上所述,从分析结果来看,与常规固定翼面飞行器相比,双向飞翼飞行器在亚/跨/超/高超声速段均具有良好的升阻比特性,可能是一种有潜力的空天飞行器布局。
4 双向飞翼布局技术难点分析
双向飞翼布局通过飞行器旋转90°实现不同速域下气动外形与性能需求间的匹配,与常规飞行器相比,设计理念截然不同:飞行器具有两个互相垂直的对称面,且质心通常布置于机身正中央。双对称设计、强质心约束、飞行过程中姿态转换等特点给飞行器的外形设计带来极大挑战,制约了双向飞翼布局的应用。 下面针对影响双向飞翼布局设计的三个关键难点:大展弦比模态纵向静不稳定度过大、飞行模态转换实现困难、飞行器/发动机耦合设计难度大等展开分析,提出可行的解决途径。
4.1 大展弦比模态纵向静稳定度问题
双向飞翼飞行器以大展弦比模态飞行时,可近似看成一段小后掠的梯形翼,根据空气动力学理论,低速时焦点位置大致位于25%弦长处,而此时质心处于在50%弦长位置,如图8所示。以机身为参考长度,飞行器的纵向静不稳定度可达25%,给飞行器的操稳控制设计带来极大困难[12-14]。

图8 亚声速飞行模态剖面焦点连线与质心位置对比Fig.8 Comparison between sections′ aerodynamic center line and center of gravity at subsonic flying mode
通过研究,初步提出了两种解决该问题的途径:剖面形状优化及质心位置随动调节。
剖面形状设计需以焦点位置后移为主要优化目标,兼顾考虑飞行器的升阻比特性。
图9给出了前期4种剖面形状下飞行器的静不稳定度和升阻比特性。从图中可以看出,改变剖面形状确实可以改善飞行器的纵向静不稳定度,且采用较小的前缘钝度可获得相对更好的结果,以6th-wing4为基准剖面构建的双向飞翼外形静不稳定度可降低至12%左右。

图9 剖面形状对飞行器静不稳定度和升阻比影响Fig.9 Influence of profile curve on portrait stabilization and lift-drag ratio
上述对剖面形状的设计基于剖面左右对称的假设。更激进的,可采用非对称剖面,仅维持机身平面形状对称,有可能获得更好的纵向稳定特性。
质心位置随动调节方法则需借助机体内部燃油调节,在大展弦比模态时使质心位置相对前移,尽量减小飞行器焦点与质心间的距离,如图10所示。

图10 双向飞翼转移燃油调节质心方案示意Fig.10 Modifications of center of gravity by moving fuel tank
4.2 飞行模态转换问题
大展弦比姿态和小展弦比姿态之间的模态转换是双向飞翼飞行器的特有过程,如何实现飞行模态转换过程的稳定可控是必须解决的问题。Zha G C[1]等人建议借助阻力式方向舵的手段实现该过程,但对该过程并未开展细致分析。
本文针对飞翼布局航向中性稳定的特点,提出了一种利用空气舵面进行飞行模态转换的新思路,在飞行器两种飞行姿态下的尾部附近各配置一个可转动范围极大的全动垂尾,在高低速模态转换过程中提供偏航力矩。
正常飞行时,机身尾部附近垂尾起横航向增稳和控制作用,翼稍附近的垂尾沿顺气流方向布置,以尽量减小其对飞行器的附加阻力和非对称气动力影响;飞行模态转换时,首先借助机身尾部垂尾进行偏航控制,在偏航角度增大到一定数值后,两片垂尾共同完成偏航控制,直至飞行器完成飞行模态转变,模态转换过程中的操控如图11所示。

图11 双向飞翼飞行器飞行模态转换技术原理示意图Fig.11 Flying mode conversion of bi-directional flying wing
该方法不但可获得飞行模态转换过程的偏航力矩,还可在正常飞行过程中借助垂尾增加飞行器的横航向稳定性,极大地改善双向飞翼飞行器的操稳特性。 通过参考美国典型客机B-737和典型战斗机F-16飞行器的垂尾设计[15],图12给出了初步构建的带非对称垂尾的双向飞翼飞行器外形。

图12 带垂尾双向飞翼空天飞行器概念外形三视图Fig.12 Different views of the vehicle concept with vertical tail
以低速大展弦比模态为参考,开展了马赫数0.8、0°攻角下不同侧滑角的定常状态数值计算。模态转换过程中,两片全动舵面同时偏转,偏转规律如图13所示。从图中可以看出,随飞行器侧滑角增大,舵偏角度迅速增大,但对应的舵面与气流偏转角度始终维持在±15°,分析认为在该气流夹角范围内,舵面具备控制能力。

图13 飞行模态转换过程中舵面偏转示意Fig.13 Rudder deflection in flying mode conversion
图14给出飞行器在飞行模态转换过程中偏航力矩系数变化规律。从图中可以看出,初步设计的舵面可以实现飞行模态转换过程的稳定可控。

图14 机身偏航力矩变化及舵面控制能力图Fig.14 Airframe yawing moment and the control limit of rudder in flying mode conversion
加装非对称垂尾后飞行器不再具有面对称特征,以大展弦比姿态或小展弦比姿态飞行时,会产生非对称偏航力矩,有必要分析飞行器非对称舵面对气动特性的影响。
针对图12给出的飞行器外形,通过数值仿真,针对无攻角、无侧滑状态,开展了大展弦比模态和小展弦比模态带舵面气动性能计算,分析了飞行器非对称气动力矩大小及所需的配平舵偏角,结果如表1所示。

表1 非对称舵面对偏航力矩影响及所需垂尾舵偏Table 1 Yaw moment caused by asymmetric vehicle tail and needed deflect angle
从表1中可以看出,飞行器在大展弦比模态和小展弦比模态下,非对称偏航力矩均较小,所需的垂尾配平舵偏在1.5°以内,对飞行器常规姿态飞行影响不大。 图15给出了飞行器在典型工况下的表面压力分布云图,从图中可以看出,加装非对称舵面后,由于舵面顺气流放置,其对飞行器流动干扰较弱,飞行器表面压力分布仍呈现近似对称的特征,偏航力矩主要由非对称舵面的阻力产生,量值较小。
4.3 飞行器/发动机耦合设计问题
目前空天飞行器的主要动力形式是组合动力发动机,若将其安装于双向飞翼飞行器上,则必须要求发动机与机身相对旋转,增加了飞行器系统的复杂性。如何实现飞行器和发动机的耦合设计是影响飞行器方案成立的关键因素。

(a) Ma=0.3

(b) Ma=0.8


(c) Ma=3.0 (d) Ma=6.0图15 加装舵面后飞行器上表面压力系数云图对比Fig.15 Pressure coefficient contours of upper surface at different Mach numbers
本文基于双向飞翼的实际特点,提出了一种“发动机组合”的方案:在飞行器相对垂直轴线上放置两台独立发动机,低速发动机采用高性能涡轮或涡扇发动机,工作于大展弦比姿态;高速发动机采用火箭发动机或RBCC,工作于小展弦比姿态。图16给出了一种涡轮发动机和火箭发动机组合的双向飞翼飞行器概念外形。

图16 适用于双向飞翼的“发动机组合”方案示意图Fig.16 New idea of engine-combination for bi-directional flying wing vehicle
与发动机和机身相对旋转模态的方式相比,该方案降低了空天飞行器对组合动力技术发展的要求,有利于空天飞行器的早日实现,对双向飞翼空天飞行器而言,可能是一种较好的动力形式;然而考虑到该方案显著改变了飞行器上表面外形,可能影响飞行器的宽速域气动特性,有必要针对双向飞翼和进排气系统耦合优化设计。
5 结 论
本文在总体基本指标需求的前提下,完成了双向飞翼空天飞行器的概念外形设计。数值仿真结果证实了双向飞翼空天飞行器在宽速域条件下具有一致高升阻比特性,可能是一种有潜力的宽速域高超声速飞行器布局形式。
在此基础上,从实现双向飞翼飞行器方案可行的角度出发,提出了飞行器设计面临的三大技术难题,亦即大展弦比模态纵向静不稳定度偏大、飞行模态转换困难、飞行器/发动机耦合设计难度大,并有针对性的提出了可能的解决途径:
1) 针对纵向静不稳定问题,提出了修改剖面形状、甚至考虑非对称剖面形状的优化手段和质心位置调节的方法。
2) 针对飞行模态问题,提出了一种新型的基于非对称舵面的飞行模态转换控制方法。在两个飞行方向上布置全动垂尾,不仅可实现双向飞翼飞行模态转换过程的稳定可控,同时会改善飞行器航向稳定性,且不会对常规飞行模态带来太大的非对称偏航力矩。
3) 针对飞行器/发动机耦合问题,提出了一种新型的“发动机组合”的方案。在飞行器相对垂直轴线上放置两台独立发动机,低速发动机工作于大展弦比姿态,高速发动机工作于小展弦比姿态,降低了双向飞翼空天飞行器对组合动力技术的要求。
必须指出的是,当前对双向飞翼飞行器概念外形的研究仍处于起步阶段,对布局设计问题的解决途径仅仅停留在初步验证阶段,有待后续进一步深化研究。
[1]Zha G C, Im H, Espinal D.Toward zero sonic boom and high efficiency supersonic flight, part I: a novel concept of supersonic bi-directional flying wing[C]//48thAIAA Aerospace Sciences Meeting, 2010.
[2]Espinal D, Lee B, Spoato H, et al.Supersonic bi-directional flying wing, part II: conceptual design of a high speed civil transport[C]//48thAIAA Aerospace Sciences Meeting, 2010.
[3]Gan Jiaye, Lefebvre A, et al.Parametric trade study for supersonic bi-directional flying wing[C]//32ndAIAA Applied Aerodynamics Conference, 2014.
[4]Nieto A, Perez K, et al.Towards high efficiency hypersonic flight-hypersonic bi-directional flying wing[C]//50thAIAA Aerospace Sciences Meeting, 2012.
[5]Berger C, Carmona K, et al.Supersonic bi-directional flying wing configuration with low sonic boom and high aerodynamic efficiency[C]//29thAIAA Applied Aerodynamics Conference, 2011.
[6]Guan X H.Supersonic bi-directional flying wing wave drag optimization based on alternative form of CST method[J].Applied Mechanics & Materials, 2013, 477-478:240-245.
[7]Li Z K, Zhang X, Feng X Q, et al.Suydy on drag and sonic boom of supersonic bi-directional flying wing[J].Journal of Northwestern Polytechnical University, 2014, 32(4):517-522.(in Chinese)李占科,张旭,冯晓强,等.双向飞翼超声速科技激波阻力和声爆研究[J],西北工业大学学报,2014, 32(4):517-522.
[8]Gan J, Zha G.Analysis of a low boom supersonic flying wing preliminary design[C]//Scitech 2015, Aiaa Aerospace Sciences Meeting.2015:241-248.
[9]Rivers M, Dittberner A.Experimental investigations of the nasa common research model in the NASA Langley national transonic facility and NASA Ames 11-Ft transonic wind tunnel (Invited)[C]//49thAIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, 2011.
[10]Rivers M, Hunter C,Campbell R.Further investigation of the support system effects and wing twist on the NASA common research model[C]//30thAIAA Applied Aerodynamics Conference, Fluid Dynamics and Co-located Conferences, 2012.
[11]Hirschel E H, Weiland C.Selected aero-thermodynamic design problems of hypersonic flight vehicles[M].Germany: Springer Berlin Heidelberg, 2009.
[12]方宝瑞.飞机气动布局设计[M].北京:航空工业出版社, 1997.
[13]Ma S H, Wu C F, Chen H M, Study on stability and manoeuvrability of flying wing aircraft[J].Flight Dynamics, 2006 , 24(3):17-21.(in Chinese)马松辉, 吴成富, 陈怀民.飞翼飞机稳定性与操纵性研究[J].飞行力学,2006,24(3):17-21.
[14]《飞机设计手册》总编委会.军用飞机总体设计[M]//飞机设计手册,第4册.航空工业出版社, 2005.
[15]恩德雷斯.简氏飞机鉴赏指南[M].人民邮电出版社, 2012.
Research on bi-directional flying wing space shuttle configuration
LIU Xiaobin, XU Kezhe, ZHU Guoxiang*
(BeijingAerospaceTechnologyInstitute,Beijing100074,China)
The inconsistency between high-lift requirement at taking off and high lift-drag ratio requirement at supersonic/hypersonic flying often confuses aerospace shuttle designers.Bi-directional flying wing concept consists of a symmetric diamond planform.This wing flows with a high aspect ratio shape at subsonic speed, while changes its flying mode by rotating the aircraft 90° around vertical axis.It finally flows with a low aspect ratio shape at hypersonic speed.This concept is considered as a new way to overcome the design conflict between subsonic and hypersonic flight.By using the new concept, this paper constructed an aerospace shuttle.The CFD result shows that, compared with German TSTO vehicle, i.e., Sanger, the new concept aircraft has a 30%-50% higher lift-to-drag ratio at subsonic speed, reaching 16 while maintains a high lift-to-drag ratio at hypersonic speed, reaching 4.It has been indicated that bi-directional flying wing configuration is a potential option for space flight.Furthermore, three main problems have been pointed out in designing this new concept vehicle.These problems are longitudinal stability issue at subsonic speed, conversion disorders in changing flying model, and difficulties in coupling airframe and engine design, respectively.For each problem, one or more applicable solutions were proposed.Particularly, a new flying conversion mode was indicated by installing
two asymmetrical vertical fins at the tail the fuselage to provide enough control moment and improve lateral stability for the aircraft.In addition, a new power plant, i.e., the installment of individual orthogonal engines in different direction was proposed to reduce the requirements of combined power.These means may contribute to the realization of the bi-directional flying wing concept.
bi-directional flying wing; space shuttle; high lift-drag ratio; portrait stabilization; flying mode conversion
0258-1825(2017)03-0415-07
2017-01-12
2017-01-22
刘晓斌(1988-),男,山东青岛人,工程师,研究方向:飞行器气动布局设计.E-mail:xiaobin0625@126.com
朱国祥*(1976-),男,湖北武汉人,研究员,研究方向:飞行器气动布局设计.E-mail: zhuguoxiang@163.com
刘晓斌, 徐柯哲, 朱国祥.双向飞翼空天飞行器概念外形研究[J].空气动力学学报, 2017, 35(3): 415-420, 443.
10.7638/kqdlxxb-2017.0021 LIU X B, XU K Z, ZHU G X.Research on bi-directional flying wing space shuttle confi-guration[J].Acta Aerodynamica Sinica, 2017, 35(3): 415-420,443.
V411.4
A doi: 10.7638/kqdlxxb-2017.0021
猜你喜欢
军民两用技术与产品(2022年7期)2022-08-06 07:19:06
军民两用技术与产品(2022年3期)2022-06-05 06:46:14
机械设计与制造(2021年2期)2021-03-05 10:00:14
兵器装备工程学报(2020年3期)2020-04-22 08:53:20
小哥白尼(军事科学)(2018年5期)2018-06-15 09:56:04
北京航空航天大学学报(2018年1期)2018-04-20 06:38:13
北京航空航天大学学报(2017年8期)2017-12-20 08:04:56
北京航空航天大学学报(2017年5期)2017-11-23 05:54:05
安徽农学通报(2017年18期)2017-10-18 21:11:49
现代防御技术(2016年1期)2016-06-01 12:13:27