
一种面向机动目标跟踪的交互式多模型算法
2017-06-29 12:00:34王美健吴小俊
计算机应用与软件 2017年5期
王美健 吴小俊
(江南大学物联网工程学院 江苏 无锡 214122)
一种面向机动目标跟踪的交互式多模型算法
王美健 吴小俊
(江南大学物联网工程学院 江苏 无锡 214122)
针对在传感器可能偏差的情况下进行机动目标跟踪,提出一种新的交互式多模型算法,即IMM-TS-EV算法。该算法同时考虑传感器测量模型与目标运动模型这两类模型的多样性,以此处理传感器偏差性与目标机动情况。但由于考虑两类模型可能会造成模型过多而导致性能衰退,故结合扩展维特比(EV)算法以期望能有效缓解该问题,即新算法属于一种同时考虑两类模型的改进交互式多模型扩展维特比(IMM-EV)算法。最后以仿真结果验证了算法的有效性,能够利用多模型特点同时解决传感器的偏差性与目标的机动性所带来的匹配问题。
机动目标跟踪 IMM-EV算法 传感器模型 模型匹配
0 引 言
在进行机动目标跟踪的过程中,往往希望机动目标运动模型能够准确表征目标机动时的各种运动状态。典型滤波器如卡尔曼滤波[1](KF)、扩展卡尔曼滤波[2](EKF)、粒子滤波方法[3-4](PF)、概率数据关联滤波[5](PDAF)及联合概率数据关联滤波[6](JPDAF)等均属于单模型的,能够对具有单一运动状态的目标有比较好的跟踪性能。但实际的机动目标运动往往呈现多种运动状态,以单一的运动模型来刻画其运动过程,往往和实际情况有较大的偏差,最终会由于模型失配而导致跟踪误差增大甚至跟踪失败。因此,多模型估计得到了极大的研究关注,它的一些经典算法如广义伪贝叶斯(GPB)[2,7]、和交互式多模型(IMM)[8-9]等。使用多种运动模型对目标进行跟踪,各模型之间的切换转移由马尔可夫概率转移矩阵确定[10]。本文集中研究IMM算法,因为相对而言该算法在各种目标跟踪过程中已体现出较好的跟踪性能与较低计算代价。一系列IMM改进算法也相继被提出,如重加权IMM[11](RIMM)、变结构IMM[12](VSIMM)、IMM-EV[13-14]、高斯混合IMM[15](GMIMM)以及对角矩阵权重IMM[16](DIMM)等算法。但这些算法都只局限于考虑一类模型的多样性,在涉及两类模型多样性的实际应用中不能取得较佳的效果。
由于传感器在接收数据时,可能会因传感器自身因素或者外部环境(如天线阵列弯曲或无线电频率干扰等)的影响导致某些时刻或者某一时间段接收到偏差测量,即所用的传感器测量模型不匹配[17],导致跟踪性能的降低。针对这种传感器测量模型不匹配问题,文献[18]虽然使用IMM算法解决传感器测量模型的多样性,并且也取得了较佳的效果,但它只是针对单一运动状态的目标。因此,在传感器可能偏差的情况下使用多模型算法跟踪机动目标,应同时考虑传感器测量模型及目标运动模型这两类模型的多样性。但同时考虑两类模型可能会因模型数过多而导致跟踪性能的衰退,而在文献[13]中提出的IMM-EV算法,类似于变结构多模型的设计,在所有给定时刻仅合并、混合全部模型对应状态中的一个子集以形成系统的状态估计,故可以潜在地避免由于过多模型导致准确性缺失的情况。因此本文提出一种同时考虑传感器测量模型及目标运动模型的IMM-EV改进算法即为IMM-TS-EV算法。最后通过仿真实验结果体现算法的有效性。
1 系统描述及IMM-EV算法
1.1 系统描述
假定各时刻目标的运动方式能够用M个模型覆盖(mj,j=1,2,…,M),则线性系统的状态方程为:
(1)
测量方程为:
zk=Hkxk+υk
(2)
其中,上标j代表相关于模型mj的数量,xk为k时刻的状态向量,Fk为状态转移矩阵,Gk为过程噪声分布矩阵,Hk是量测矩阵。υk为标准测量噪声向量,wk为过程噪声向量,υk和wk是互不相关的零均值高斯白噪声向量,其协方差矩阵分别为Rk和Qk。
模型的跳变规律服从马尔可夫链即为:
(3)
1.2IMM-EV算法
IMM-EV[13-14]是扩展维特比(EV)算法与IMM算法所结合而成的算法,把EV算法中的一些函数机理引入到IMM算法内,使算法各时刻从模型集中选择最优模型子集参与交互混合估计及结合输出,以此得到一种新的方法计算次优状态估计。
下面给出算法的一次循环步骤:
(1) 混合权重计算(i,j=1,2,…,M;η=1,2…,r)
(4)
(5)
(6)
(2) 混合(i,j=1,2,…,M;η=1,2,…,r)
(7)
(8)

(9)
(4) 模型概率更新(j=1,2,…,M)
(10)
(5)r个最大模型概率计算(s=1,2,…,r)
(11)
(12)
(6) 状态估计和协方差综合(s=1,2,…,r)
(13)
(14)
2 IMM-TS-EV算法
2.1 算法的简单推导
对于在传感器可能偏差的情况下跟踪机动目标,除了要解决目标运动方式多样性外,还应考虑传感器的测量偏差性。本文提出了一种新的IMM算法,同时考虑传感器测量模型与目标运动模型这两类模型的多样性,从两类模型中各取单个模型形成模型对,各时刻传感器跟踪机动目标的情况呈现为其中的某个模型对。显然总模型对个数为两类模型个数之间的乘积,而过多的模型对会因其中一些不匹配模型对的竞争而导致性能的衰退,故所提算法也结合了EV算法以期望能在一定程度上缓解该问题。
将系统描述如下:
线性系统的状态方程由式(1)列出。
传感器的测量方程有两个:一个是标准模型(模型1)由式(2)列出,另一个是干扰模型(模型2)为:
zk=Hkxk+υk+ϑk
(15)
其中,ϑ为干扰噪声向量,υ、ϑ和w是互不相关的零均值高斯白噪声向量,其协方差矩阵分别为R、D和Q。
根据文献[7,13]对算法的推导进行简单描述:
(1) 算法先同时考虑传感器测量模型与目标运动模型的多样性。
利用全概率定律得到并行运行的nt×ns个滤波器,即:
(16)
其中,ms、mt分别表示传感器测量模型与目标运动模型,形成模型对(ms,mt)且两种模型相互独立,ns为传感器测量模型个数,nt为目标运动模型个数。式(16)最后一项的模型概率为:
(17)
以模型对为条件的状态后验概率密度函数如下:
(18)
(19)
式(19)得到的计算结果反映的是对k-1时刻前的过去的一种近似,这一近似是用nt×ns个模型对为条件的状态估计及其协方差来体现的;式(19)中最后一个等式表示的是按每个当前模型对各不相同的权重进行的混合,这种混合被认为是各高斯的概率密度函数的混合,即


式(20)中的最后一项(即混合概率)的推导如下:
(21)
(2) 再参照IMM-EV算法(具体内容请参考文献[13]),将EV算法的一些函数机制并入所提新算法内。则新算法中,每一循环周期中的交互混合与综合输出阶段,均是从模型对集合中选择概率最大的r个模型对参与计算。
2.2IMM-ST-EV算法主要步骤
基于2.1部分的算法推导,可以看出新算法在各时刻通过合并、混合所有模型对中最可能的模型对子集对应的状态估计,来形成系统的状态估计,类似于变结构多模型的设计,故对避免过多模型造成性能下降具有潜在作用。算法的具体实现步骤如下:
算法的一个循环周期步骤如下:
(1) 混合权重计算(η=1,2,…,r)
(22)
(23)
(24)
(2) 混合(η=1,2,…,r)
(25)
(26)

相应的似然函数计算如下:
(27)
(4) 模型概率更新如下:
(28)
(5)r个最大模型对概率计算(s=1,2,…,r)
(29)
(30)
(6) 状态估计和协方差综合(s=1,2,…,r)
(31)
(32)
3 仿真结果及分析
为了验证IMM-ST-EV算法在传感器可能偏差环境下的机动目标跟踪性能,而设置合适的跟踪仿真如下:
仿真环境:假定目标的初始位置在(5 000 m,10 000 m),初始速度为(0 m/s,30 m/s),机动目标在1~120 s进行匀速直线运动,在121~180 s以加速度为( -0.15 m/s2,-0.15 m/s2)进行匀加速运动,在181~195 s再进行匀速直线运动,在196~210 s以(0.6 m/s2,0.6 m/s2)进行匀加速度运动,最后于211~300 s进行匀速直线运动。而对传感器偏差分为两种情况:一种是确定性情况(DS),假定传感器在90~135 s与213~249 s两个确定时间段出现偏差;另一种是随机性情况(RS),假定传感器在跟踪过程中随机出现偏差的概率为0.35。
仿真参数设置:采样时间间隔T=3 s。采用两个传感器测量模型:模型1为标准的传感器测量模型(测量噪声标准差为5m),模型2为干扰的传感器测量模型(测量噪声标准差为30m)。传感器的模型转移概率矩阵及量测矩阵分别如下:
采用三个目标运动模型,模型1为匀速直线模型(过程噪声为0.000 1 m2/s6),模型2为维纳过程加速度模型(过程噪声为15 m2/s6),模型3为匀加速模型(过程噪声为0.001 m2/s6),对应的状态转移矩阵、过程噪声分布矩阵及目标的模型转移概率矩阵分别如下:
平均均方根误差[18]的计算公式为:

仿真分析:参与比较的算法有5个:仅考虑目标运动模型的IMM算法(IMM-T)、仅考虑传感器测量模型的IMM算法(IMM-S)、同时考虑两类模型的新IMM算法(IMM-ST)以及两个所提出的新算法(IMM-ST-EV(r=2)与IMM-ST-EV(r=3),其中r为所取的最可能模型个数)。图1描绘的是目标位置的真实值以及确定情况下各算法对目标位置的估计;而确定情况下各算法的位置Position、速度Velocity及其加速度Accelerate的均方根误差分别如图2、图3和图4所示。图5描绘的是目标位置的真实值以及随机情况下各算法对目标位置的估计;而随机情况下各算法的位置Position、速度Velocity及其加速度Accelerate的均方根误差分别如图6、图7与图8所示。两种情况下各算法的位置、速率及加速度的平均均方根误差分别由表1与表2列出。

图3 确定性情况下的速率均方根误差

图4 确定性情况下的加速度均方根误差

图5 随机情况下目标位置的真实值与估计值

图6 随机情况下的位置均方根误差
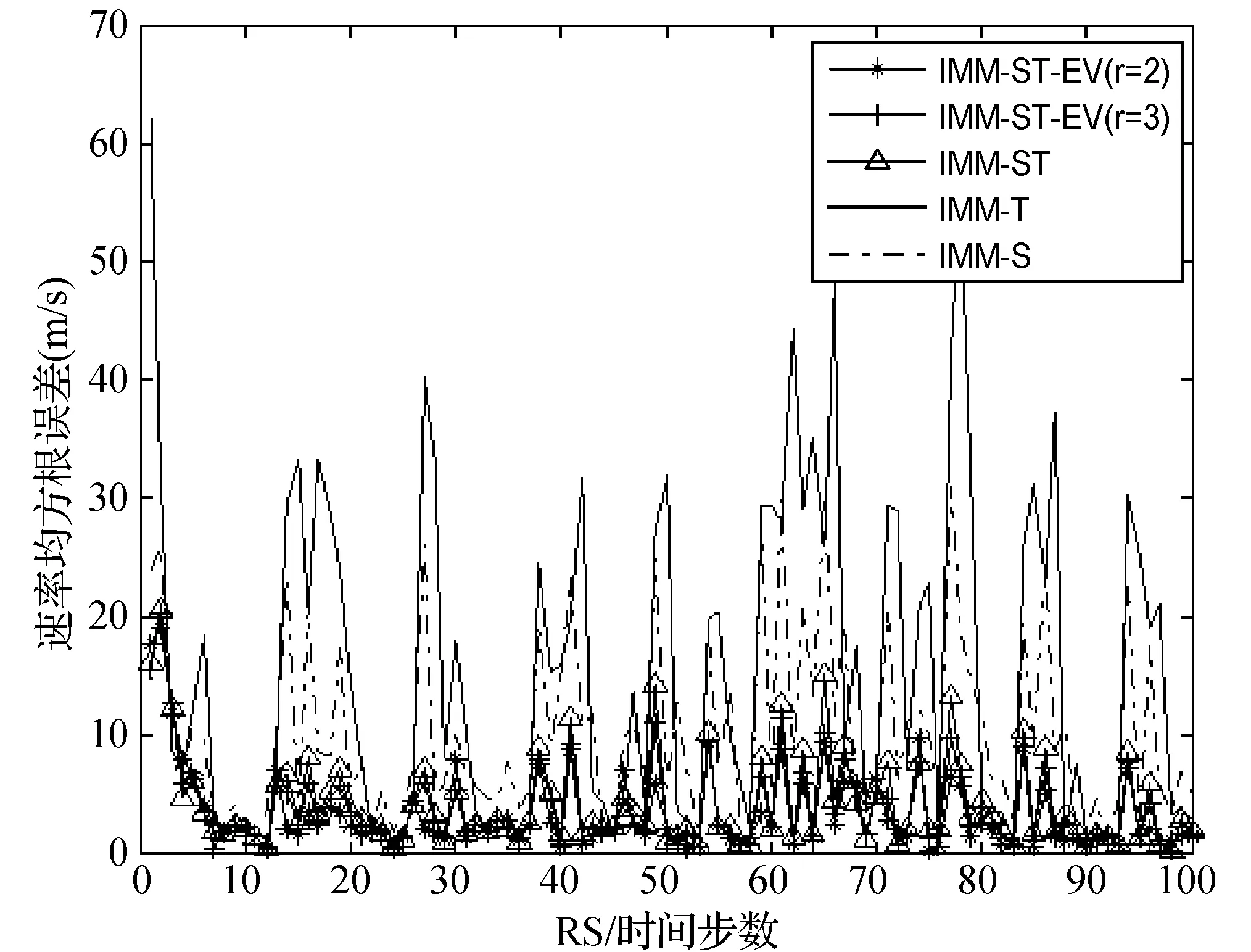
图7 随机情况下的速率均方根误差

图8 随机情况下的加速度均方根误差
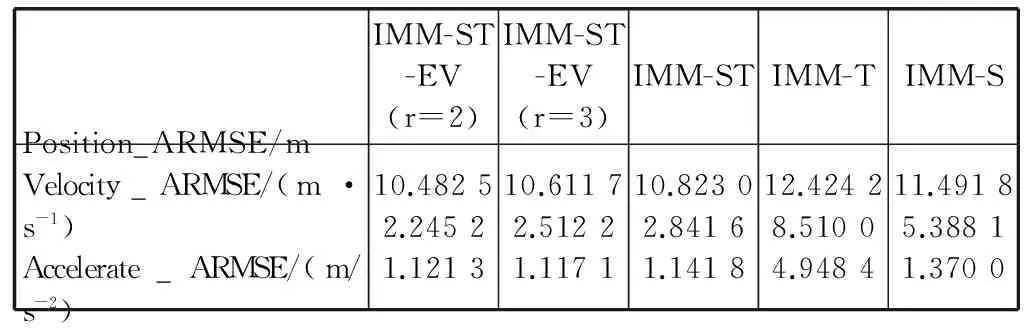
IMM-ST-EV(r=2)IMM-ST-EV(r=3)IMM-STIMM-TIMM-SPosition_ARMSE/mVelocity_ARMSE/(m·s-1)Accelerate_ARMSE/(m/s-2)10.48252.24521.121310.61172.51221.117110.82302.84161.141812.42428.51004.948411.49185.38811.3700

表2 随机性情况(RS)下各算法的平均均方根误差比较
由表1与表2所列结果、图1到图4中传感器的两个偏差时间段实验结果以及图5到图8的传感器随机偏差实验结果可以看出:IMM-T算法与IMM-S算法的跟踪效果最差,可能原因在于一类模型的IMM算法不能同时兼顾目标机动性与传感器偏差性。而IMM-ST算法比前两种算法有着明显的性能优势,尤其是在速率及加速度估计方面,显然能够在一定程度上解决前两种算法的缺陷。IMM-ST-EV算法较之IMM-ST算法在跟踪性能上又有一定的提升,因此IMM-ST-EV算法不仅能够相应地处理一类模型IMM算法的不足,还能一定程度地缓解过多模型导致跟踪性能衰退的情况。同时,由图1到图4中传感器未出现偏差时间段的实验结果可得:即使在传感器无显著偏差时,新算法同样也能够保持可观的跟踪效果。
4 结 语
在机动目标跟踪过程中传感器可能偏差的问题上,利用多模型的思想将传感器是否偏差模成相应的模型且目标运动多样性也使用多个模型覆盖,但同时考虑两类模型可能会因模型数过多而使算法的跟踪性能衰退,为此结合EV算法以期望缓解这个问题,即提出了IMM-ST-EV算法。新算法的效果通过仿真得到了验证,算法对传感器可能偏差的环境下跟踪机动目标更具适应性,提高了跟踪精确度,有效地兼顾了传感器测量偏差问题与目标机动性,也能够在一定程度上缓解模型过多带来的性能问题。但IMM-ST-EV算法在得到上述性能进步的同时,却也因考虑两类模型而带来了一些算法复杂性的提高,导致算法的实时性有所降低。故如何减少算法的运行时间,提高实时性将成为下一步算法研究的重点。
[1] Haug A J. Bayesian estimation and tracking: a practical guide[M]. John Wiley & Sons,2012.
[2] Bar-Shalom Y,Li X R,Kirubarajan T. Estimation with applications to tracking and navigation[M]. New York:Wiley-Interscience,2001.
[3] Cappe O,Godsill S J,Moulines E. An overview of existing methods and recent advances in sequential monte carlo[J]. Proceedings of IEEE,2007,95(5):899-924.
[4] Cheng Q,Bondon P. An Efficient Two-Stage Sampling Method in Particle Filter[J]. IEEE Transactions on Aerospace and Electronic Systems,2012,48(3):2666-2672.
[5] Bar-Shalom Y, Daum F, Huang J. The probabilistic data association filter[J]. IEEE Control Systems, 2010, 29(6):82-100.
[6] 张成宝.密集目标环境下的数据关联算法研究[D]. 北京:中国船舶研究院,2013.
[7] 夏佩伦. 目标跟踪与信息融合[M]. 北京: 国防工业出版社, 2010.
[8] Blom H,Bar-Shalom Y. The interacting multiple model algorithm for systems with markovian switching coefficients[J]. IEEE Transactions on Automatic Control,1988,33(8):780-783.
[9] Li X R, Jilkov V P. Survey of maneuvering target tracking. Part V. Multiple-model methods[J]. IEEE Transactions on Aerospace & Electronic Systems, 2005, 41(4):1255-1321.
[10] 周宏仁, 敬忠良, 王培德. 机动目标跟踪[M]. 北京: 国防工业出版社. 1991.
[11] Johnston L A, Krishnamurthy V. An improvement to the interacting multiple model (IMM) algorithm[J]. IEEE Transactions on Signal Processing, 2002, 49(12):2909-2923.
[12] Li X R, Bar-Shalom Y. Multiple-model estimation with variable structure[J]. IEEE Transactions on Automatic Control, 2000, 45(11):2047-2060.
[13] Ho T J, Chen B S. Novel extended Viterbi-based multiple-model algorithms for state estimation of discrete-time systems with Markov jump parameters[J]. IEEE Transactions on Signal Processing, 2006, 54(2):393-404.
[14] Ho T J. A switched IMM-Extended Viterbi estimator-based algorithm for maneuvering target tracking[J]. Automatica, 2011, 47(1):92-98.
[15] Laneuville D, Bar-Shalom Y. Maneuvering target tracking: A Gaussian mixture based IMM estimator[C]// IEEE, 2012:1-12.
[16] Fu X, Jia Y, Du J, et al. New interacting multiple model algorithms for the tracking of the manoeuvring target [Brief Paper][J]. Iet Control Theory & Applications, 2010, 4(10):2184-2194.
[17] Kennedy H L. Fusion of possibly biased location estimates using Gaussian mixture models[J]. Information Fusion, 2012, 13(3):214-222.
[18] Zhu H, Chen S, Han C. Fusion of Gaussian Mixture Models for Possible Mismatches of Sensor Model[J]. Information Fusion, 2014, 20(15):203-212.
AN INTERACTIVE MULTI-MODEL ALGORITHM FOR MANEUVERING TARGET TRACKING
Wang Meijian Wu Xiaojun
(SchoolofIoTEngineering,JiangnanUniversity,Wuxi214122,Jiangsu,China)
Aiming at the possibility of maneuvering target tracking in the case of sensor biases, a new interactive multi-model algorithm ,IMM-TS-EV algorithm, is proposed. The algorithm takes into account the diversity of the sensor measurement model and the target motion model in order to deal with sensor deviation and target maneuver. However, considering the two models may cause the model is too much and lead to performance degradation, it is expected to combine extended Viterbi (EV) algorithm to effectively alleviate the problem, that is,the new algorithm belongs to an improved interactive multi-model extended Viterbi algorithm (IMM-EV) which considers both types of models simultaneously. Finally, the simulation results verify the effectiveness of the algorithm, can use the characteristics of multiple models simultaneously to solve the deviation of the sensor and the target mobility caused by the matching problem.
Maneuvering target tracking IMM-EV algorithm Sensor model Model matching
2016-04-18。国家自然科学基金项目(61373055);国家自然科学基金青年科学基金项目(61103128)。王美健,硕士生,主研领域:目标跟踪与信息融合。吴小俊,教授。
TP301.6
A
10.3969/j.issn.1000-386x.2017.05.037
猜你喜欢
中学生数理化·七年级数学人教版(2023年3期)2023-03-21 00:44:56
装备制造技术(2020年3期)2020-12-25 05:21:52
学生天地(2020年6期)2020-08-25 09:10:50
数学年刊A辑(中文版)(2020年2期)2020-07-25 02:04:36
当代陕西(2019年12期)2019-07-12 09:12:02
汉语世界(The World of Chinese)(2019年1期)2019-03-18 01:50:16
自动化学报(2017年2期)2017-04-04 05:14:28
中学生数理化·七年级数学人教版(2016年2期)2016-05-30 21:20:57
系统医学(2016年8期)2016-02-20 02:55:08
小哥白尼·军事科学画报(2014年8期)2015-04-07 03:54:50
