火电机组凝汽器真空故障诊断的研究
2017-06-23 12:26:22罗宁,何青
电力科学与工程 2017年5期
罗 宁, 何 青
(华北电力大学 能源动力与机械工程学院,北京 102206)
火电机组凝汽器真空故障诊断的研究
罗 宁, 何 青
(华北电力大学 能源动力与机械工程学院,北京 102206)
通过仿真机进行凝汽器故障诊断,选择合适的故障判断基准,判断凝汽器系统真空是否发生故障。首先在确定真空应达值时建立了Pc-M模型,在其后的真空故障判断中使用该Pc-M模型表示机组的真空应达值,当阈值取0.5%时可以诊断出真空故障,最后分别采用了线性相关度法和BP神经网络法对单故障工况和多故障并发工况进行诊断。结果表明BP神经网络法相比线性相关度法无论是速度还是精度都有明显的优势,而且在多故障并发的情况下同样结果精确。
凝汽器; 故障诊断; 真空应达值; 线性相关度; BP神经网络
0 引言
火力发电厂是生产电力的重要场所,其系统设备纷繁复杂,体积巨大,并且设备多处于高温高压高转速的严酷工作条件下,任何一个设备的故障都可能导致严重的后果,轻则停机冲击电网,重则危及电厂周边人身及财产安全。
凝汽器是将汽轮机乏汽凝结成水的特殊换热器,又称冷凝器。能够在汽机末级建立并维持真空,提高汽轮机比焓降,从而增大汽机输出功率和循环热效率;为锅炉供应洁净的凝结水给水。凝汽器设备故障频发并且故障发生时可能远不止一处故障,所以凝汽器的工作状况对整体机组的安全经济性有重大影响[1]。
凝汽器主要会发生真空故障、凝结水过冷、冷却管泄露、冷却管振动等故障[2]。其中最为常见的是真空故障[3]。由于凝汽器低真空现象会引起汽轮机运行中的各种故障,因此研究其故障诊断技术和方法,开发行之有效的故障监测和诊断系统,对机组的安全运行具有至关重要的作用。
目前,凝汽器故障诊断常见方法有神经网络法、模糊专家系统法、D-S 规则方法和模糊模式识别方法以及其他方法[4-6]等,都不同程度地解决了凝汽器故障诊断中的不确定性问题[7-10]。
本文主要针对宁海1 000 MW仿真机组进行凝汽器部分的故障诊断,选择合适的故障判断基准,判断凝汽器系统真空是否发生故障,并建立起一个能够快速准确判断出故障发生的故障诊断模型。当判断出凝汽器真空故障时,在单故障发生和多故障并发等多种状况下检验该模型诊断结果的准确性。除了使用BP神经网络法进行诊断外,还使用最简单原始的向量线性相关度的方法进行诊断,通过对比两种诊断方法来表现BP神经网络法的优越性。
1 凝汽器故障集的确定
1.1 实验用仿真机机组简介
本次实验使用的仿真机仿真的是浙江国华宁海发电厂的1000 MW机组[11],其机组主要参数如下:
(1)锅炉部分。SG3091/27.56-M54X,上海锅炉厂生产的BMCR工况额定蒸汽流量3091T/H额定工况蒸汽压力27.56 MPa。
(2)汽机部分。N1000-26.25/600/600(TC4F),超超临界一次中间再热凝汽式、单轴、四缸四排汽汽轮机,三高(双列)、四低、一除氧。
(3)凝汽器部分。凝汽器双背压,在设计条件及主机THA设计工况下,汽轮机平均背压6.2 kPa;循环冷却倍率为55(按THA工况主机及小汽机排汽总量为基准),循环水设计进水温度为24.5 ℃,循环水为海水。凝汽器补充水采用喷雾除氧。
1.2 典型凝汽器故障集
通过参考各种同类文献,整理出如表1所示的几个典型的凝汽器故障集[12-17]。这些典型故障可以在之后故障集的确定中作为参考。
1.3 故障征兆集的确定
通过查阅宁海1 000 MW机组汽轮机分册手册,找出手册中给定的故障特征参数。根据参考文献中整理得到的故障征兆参数,结合机组实际结构特点,可以为下一步在仿真机中确定故障发生时发生变化的参数做参考。
就实验结果准确性来讲,所选取的征兆参数越详尽,则结果越准确。考虑操作量以及时间因素,选择故障发生时变化区分度较明显的参数。
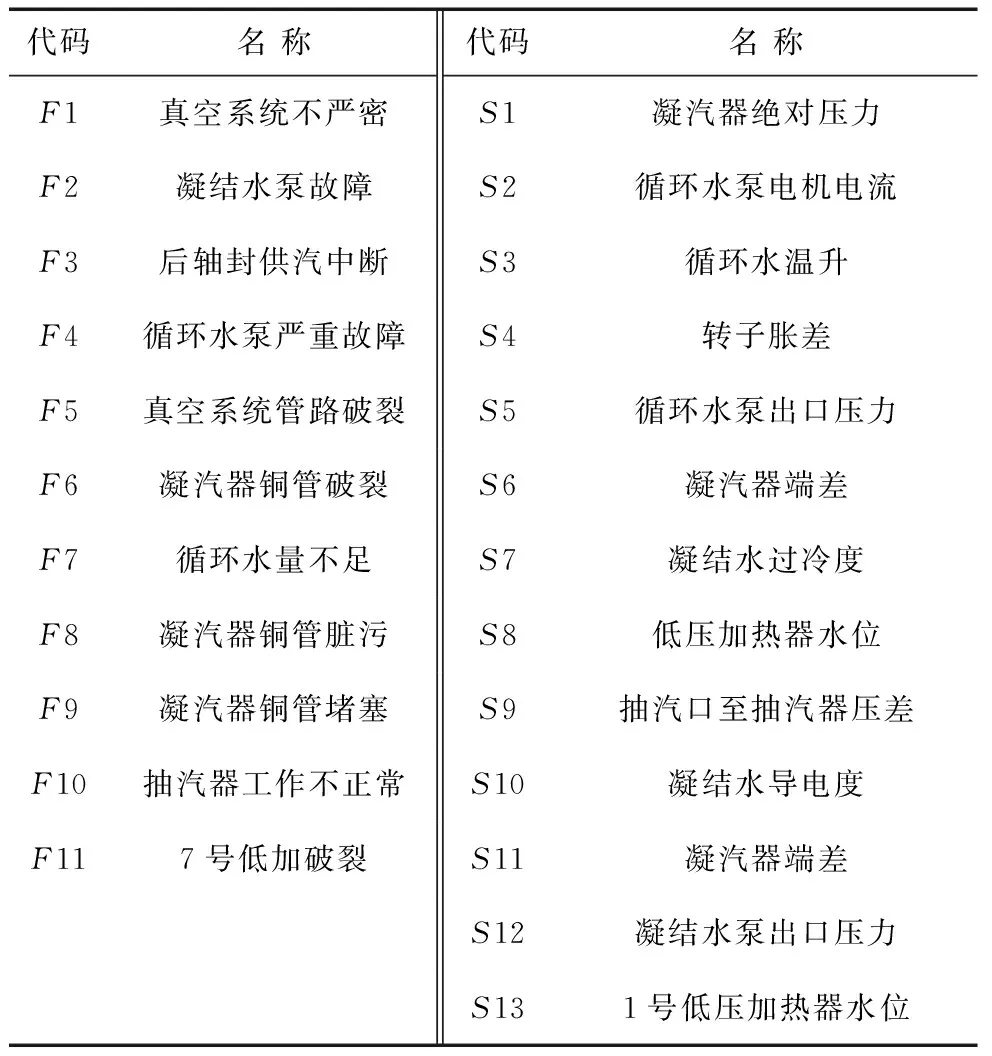
表1 典型凝汽器故障集汇总
结合在仿真机中故障发生时产生变化的各项参数与实际操作量的权衡,如表2所示最终选取如下30个征兆参数作为本次设计的特征集。
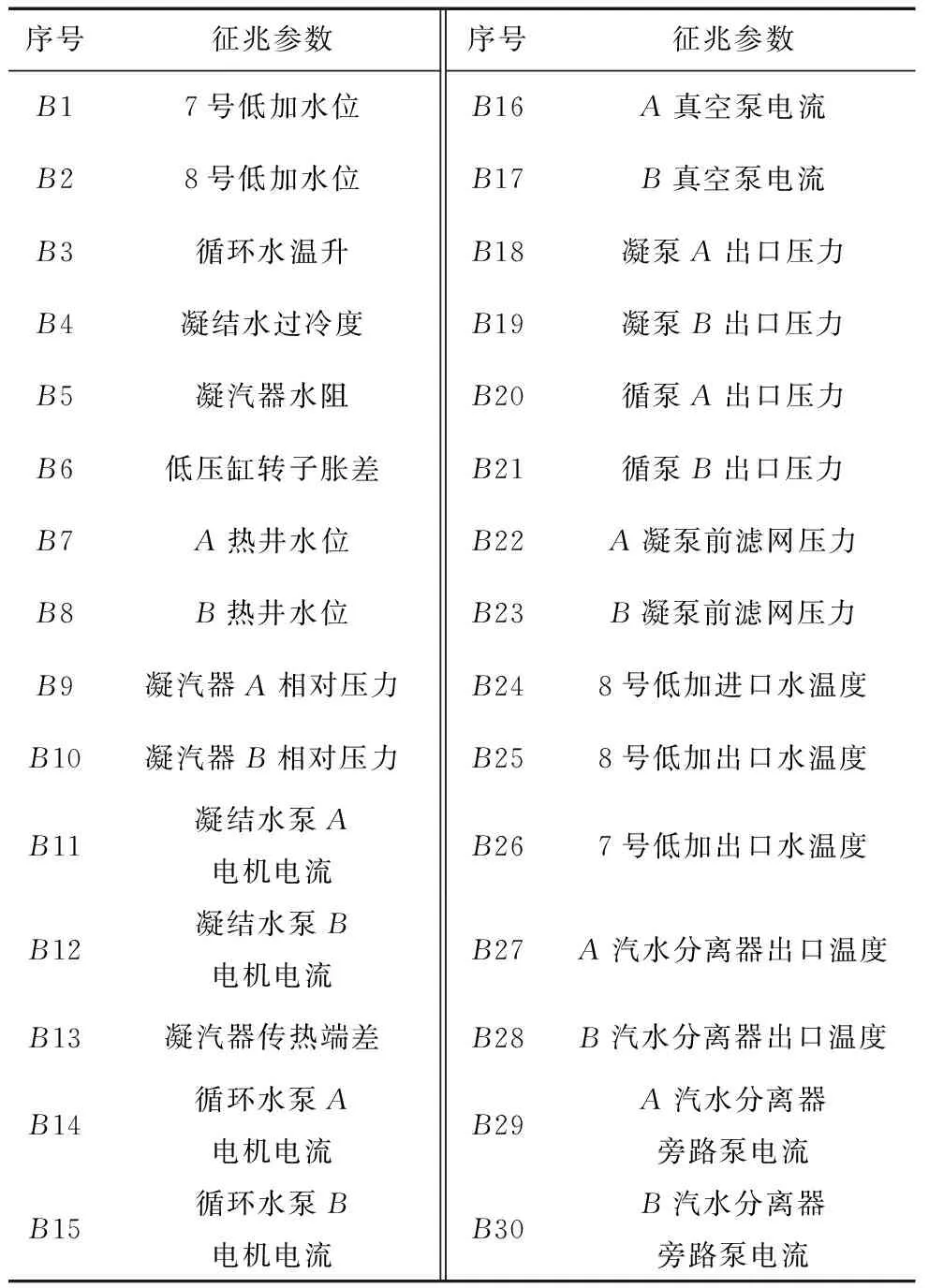
表2 故障征兆参数集
2 真空应达值判断故障
2.1 故障判断基准选择
故障判断基准中基准所指的是在机组正常运行工况下某项参数所应该达到的数值,如真空基准与传热系数K基准。
直接判断真空法:通过判断实际真空是否达到真空应达值来直接判断真空是否故障。
传热系数K判断真空:通过判断传热系数K是否达到应达值来判断是否发生故障。
采取直接判断真空法时,常规方法是先算出凝汽器的真空应达值,然后通过对比凝汽器实际真空度和应达值偏差来判断是否发生故障,但是在计算真空应达值时存在如下问题:
(1)怎样量化表达冷却管内壁表面清洁度。
(2)冷却管流程和冷却管的结构因素如何考虑。
(3)在计算凝汽器端差时需要用到的传热系数K如何确定。
凝汽器总体传热系数K本身受很多因素影响,通过量化计算真空应达值较困难,且计算传热系数K过程又存在多个不同的标准(1.别尔曼公式2.美国传热协会(HEI)公式3.英国电气机械制造协会(BEAMA)公式)。由此可见,通过计算来得到真空应达值的方法很难实现。
2.2 真空应达值基准确定
鉴于上述传统计算真空应达值的各种局限性,本次设计中我们作出Pc-M的拟合曲线用以代替传统方法中真空应达值的计算。由于此拟合曲线是在本机组仿真机上通过数据采集得到,并非计算得出,排除了计算应达值时很多影响因素的干扰,因此该方法得出的应达值比计算得出的真空应达值K更加准确。
Pc为凝汽器背压,M为表征工况的参数,我们可以用以下公式计算出M值来表征凝汽器的运行工况,M值的具体计算方法由式(1)给出:

(1)
式中:Pc为凝汽器背压,kPa;Tw为循环水进口温度,K;Dw为循环水流量,kg/s;Cp为水密度,kg/m3。
2.3 拟合偏差的计算
(1)拟合曲线Pc-M及拟合偏差计算:
本文中所提到的各项偏差计算是指当前变量x1相对应达值x0的偏差,具体的计算方法由式(2)给出:
(2)
为了能更直观表示出个工况下拟合偏差的大小关系,我们做出如下图1所示δ-M折线图。
从图1中可以清楚的看出,拟合曲线偏差的最大值δ=0.459%。
(2)各故障下真空度与拟合值的偏差计算
以600 MW工况为例,依次插入9个故障并采集各故障下的凝汽器A、B的真空数值。同样,每2 min记一次数,持续2 h,共计60组数据。由于故障A8真空破坏门误开和A9循环水中断是机组重大设备故障,均会迅速导致机组跳机,无法测满2 h的数据,对于这两个会引起跳机的故障采取如下采集方式:每2 s记一次数,持续1 min,共计30组数据。如图2所示,表示各故障下真空相对应达值拟合值的偏差大小关系。
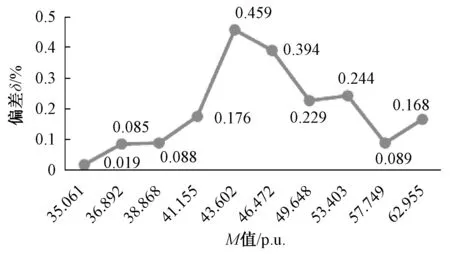
图1 各工况下凝汽器背压拟合偏差曲线

图2 各故障工况下真空较拟合值的偏差曲线
出现图中所示情况的主要原因是:A7故障为真空系统泄露,而真空系统泄露是真空下降很快,故该工况下真空相对拟合应达值偏差很大;A8和A9故障为循环水中断和真空破坏门误开,这两个故障均会引起机组迅速反映并跳机,从而导致这两个工况下的凝汽器真空度急剧下降。
通过数据的比较,发现9个故障发生时的真空相对拟合值偏差的最小值δ1=0.512%大于拟合最大偏差δ8=0.459%,当δ取0.5%时,可以用此方法直接判断真空可以诊断出故障是否发生。
2.4 故障论域特征向量征兆参数阈值确定
对于征兆表达方式有如下两种:(1)随时间的变化率;(2)与应达值的偏差及阈值;它们的征兆表达方式的依据及优缺点如表3所示。
对于会引起真空急剧下降并致机组跳机的故障,需要及时发现并采取相应的补救措施,所以当机组发生这类故障时,对应的征兆应依据参数单位时间变化率的正负来表征;对于引起真空缓慢下降的故障,由于这类故障发生时,相应的征兆参数变化缓慢,所以可根据参数运行值与应达值的偏差及阀值来进行表征如表4所示。具体表现为A1~A7故障采用第二种表达方式,A8、A9是会引起跳机的故障采用第一种表达方式。
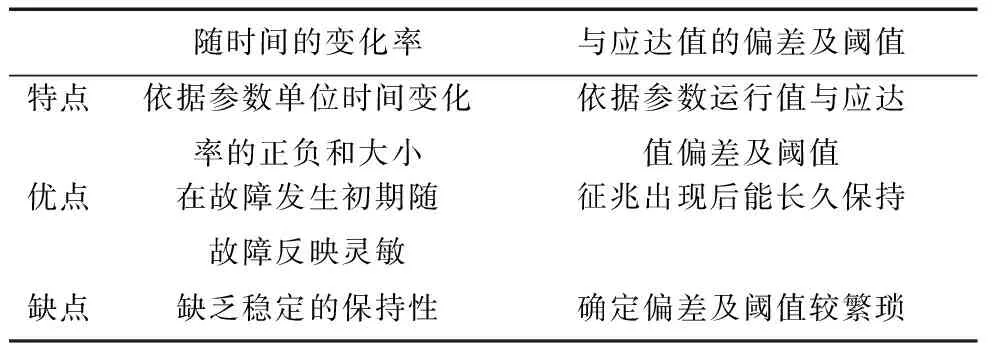
表3 两种征兆表达方式的依据及优缺点
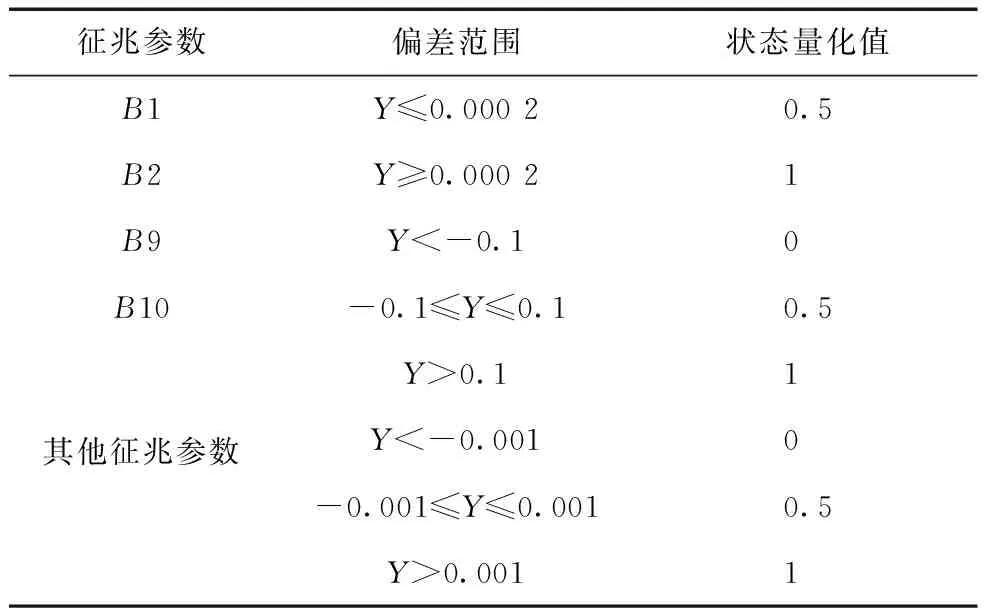
表4 各征兆参数状态量化值及对应的偏差范围
注:Y表示故障特征参数在该工况下相对应达值的偏差。
为了得到故障论域特征向量,我们需要在全工况下对各个故障进行采集数据并分析。通过确定一个合适的阈值,来将各故障下30个征兆参数转化为故障特征向量。此步骤需要采集大量数据并进行分析,操作量极大。由于本文主要研究的是真空应达值的确定及故障判断方法,确定阈值并非我们的主要研究目标。其确定的阈值标准如表4所示。
3 线性相关度法的故障诊断
3.1 线性相关度模型
首先,建立线性相关度的模型
Y=[A]X
(3)
式中:Y为故障输出向量,单元数为9,每个单元数分别代表故障相关度;X为故障特征向量,单元数30;[A]为前文中提及到的在仿真机上仿真得到的故障论域特征向量。
3.2 线性相关度法的验证
在仿真机600 MW工况分别插入故障。A4:B循环水泵跳闸;A5:A真空泵跳闸且备用泵不联启;A4、A5两个故障同时发生。插入故障A4后,采集30个征兆参数的数值,并根据上一章中的量化偏差阈值将其转换成该故障下的特征向量。同理,可以得到A真空泵跳闸且备用泵不联启故障下的特征向量和两个故障同时发生时的故障特征向量。将3组故障特征向量X分别带入模型公式计算。
(1)A4:B循环水泵跳闸故障
故障特征向量
X4=[1,1,1,0,0,0,0.5,0.5,0.5,0.5,0.5,1,0,1,1,1,0.5,0.5,0.5,0.5,0,0, 0.5,0.50.5,0.5,1,1,0.5,0.5]
故障输出向量
Y4=[8.5,11.75.12.13.9.9.12.5,10.5,]
从图3中可以看出,A4故障所对应的单元数13最大,为线性最相关。故该诊断结果表明A4故障发生。与实际插入故障相符,故诊断结果正确。
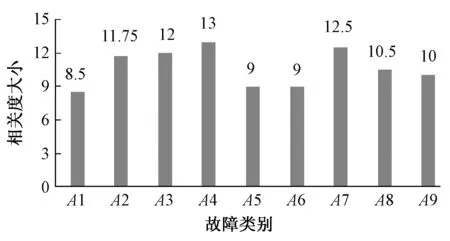
图3 A4故障特征向量对应的相关度诊断结果
(2)A5:A真空泵跳闸且备用泵不联启
故障特征向量
X5=[1,1,0.5, 0.5, 0.5, 0.5, 0.5, 0.5, 0.5, 0.5, 0.5,1,0, 0.5, 0.5,0, 0.5, 0.5, 0.5, 0.5, 0.5, 0.5, 0.5, 0.5, 0.5, 0.5, 0.5,1,0.5, 0.5,]
故障输出向量
Y5=[8,9.75,9,9,9.75,9,11,9.75,8.5]
从图4中可以看出A7故障所对应的单元数11最大,为最相关,故而该诊断结果表明发生A7故障真空系统泄露。而实际发生的故障为A5故障A真空泵跳闸且备用泵不联启,可以看出,这次未能成功诊断出故障。
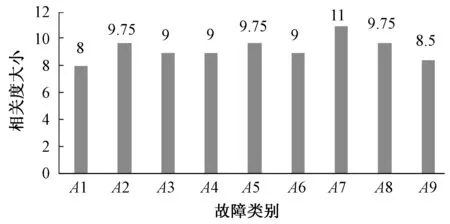
图4 A5故障特征向量对应的相关度诊断结果
(3)A4、A5故障同时发生
故障特征向量
X45=[1,1,1,0,0,0.5,0.5,0.5,0.5,0.5,1,0.5,0.5,1,1,0, 0.5,0.5,0.5,0,0, 0.5,0.5, 0.5, 0.5, 0.5,1,1,0, 0.5]
故障输出向量
Y45=[8,10.75,11,12,9.5,9,12,10,9.5]
从图5中可以看出A4和A7对应的单元数12最大,为线性最相关,诊断结果表明A4、A7故障发生。实际发生的故障为A4和A5故障。本方法只是诊断出其中一个故障,依旧未能成功的将两个故障全部诊断出来。
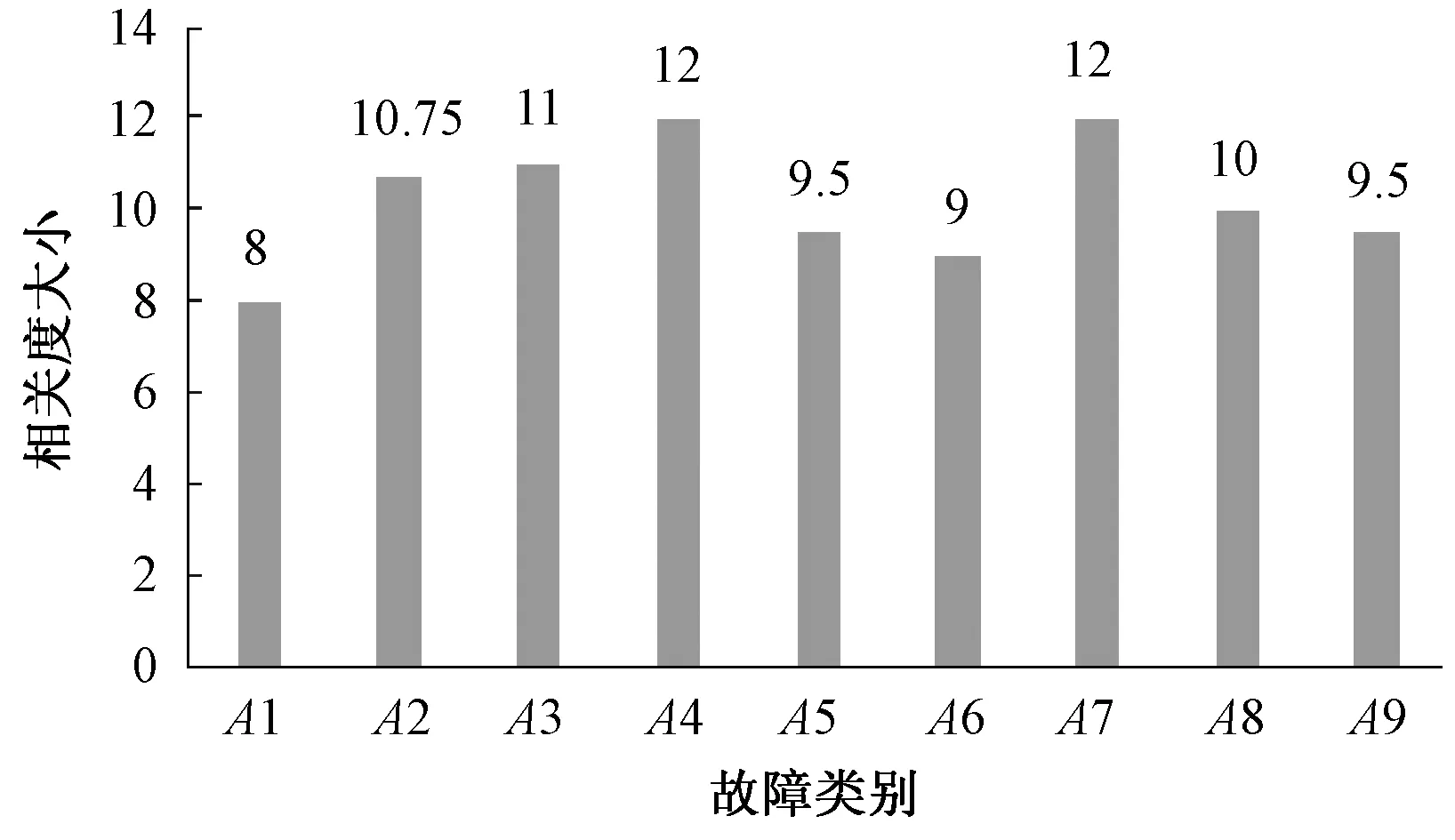
图5 A4、A5故障特征向量对应的相关度诊断结果
除了不能成功诊断出故障外,在三次故障诊断的结果图中均可以发现,9个故障的相关度区分度很小,相关度相差只有1.5甚至不到1。如何判定究竟是哪个故障发生也是个很大的问题。由于区分度很小,严格来讲,并不能确定是某个故障发生。
综上结果表明,线性相关度法存在着明显的不足,一是无法诊断多个故障同时发生的工况。在某些单个故障发生的工况下,该方法也存在一些问题,问题主要集中在相关度区分度不足,例如在某些故障工况下,诊断出的各故障相关度很接近,很难确定究竟是哪个或哪些故障发生。
基于存在以上提出的种种问题,在实际诊断中,这种最原始的方法几乎很少使用,为此,我们重新使用了一种常用的方法来进行本次故障诊断研究。
4 基于BP神经网络的故障诊断
4.1 BP神经网络法简介
神经网络是目前在故障诊断领域使用最频繁的诊断方法之一。由于其是将信息存储于网络内的神经元中,并且通过多次学习组织来达到精确逼近任意复杂非线性系统的目的,故其有着较高的诊断精度。BP神经网络即为基于BP算法的神经网络。BP算法即为误差反向传播(Error Back Propagation)算法。BP算法的基本特点是,学习过程由信号的正向与误差的反向传播两个过程组成。多层前馈网络的训练经常采用误差反向传播算法,所以也常将多层前馈网络直接称为BP神经网络。
如图6所示,BP神经网络主要包括如下3个结构:输入层、输出层和隐含层。在本次设计中,输入层为30个故障征兆参数;输出层为故障集中的9个故障。
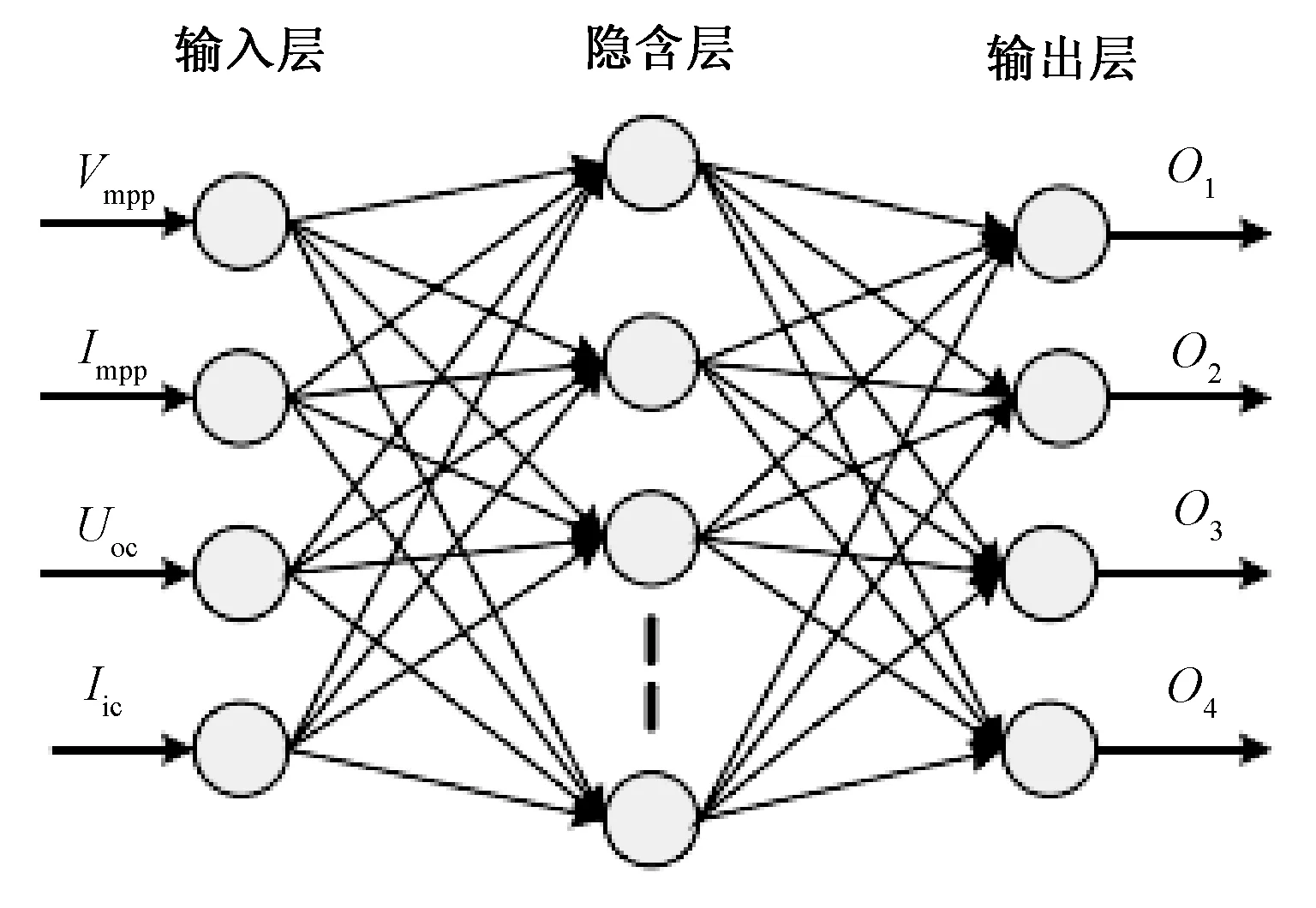
图6 BP神经网络拓扑结构模型
其中隐含层节点数是决定故障诊断精确度的一个重要因素,若节点数过少,神经网络的性能很差,不能产生足够的连接权组合数来满足对样本的学习最终导致诊断结果正确率不够高。如果选取过少,虽然解决了之前正确率不高的问题,但同时导致训练学习的时间过长且结果很难达到最优点。
4.2 建立BP神经网络模型及验证
4.2.1 建立BP神经网络模型
在MATLAB 中创建程序,调用MATLAB工具箱中的BP神经网络工具。本次设计中使用的MATLAB版本为R2015a。
程序部分参数设置如下:隐含层节点数取40,最大训练次数为5 000,每隔20步显示一次训练结果,训练要求的精度0.000 1,初始学习率的选择0.85,学习速率1 r下降比设置为0.7,学习速率增长比设置为1.05,动量因子的选择0.9。程序模型如图7所示。
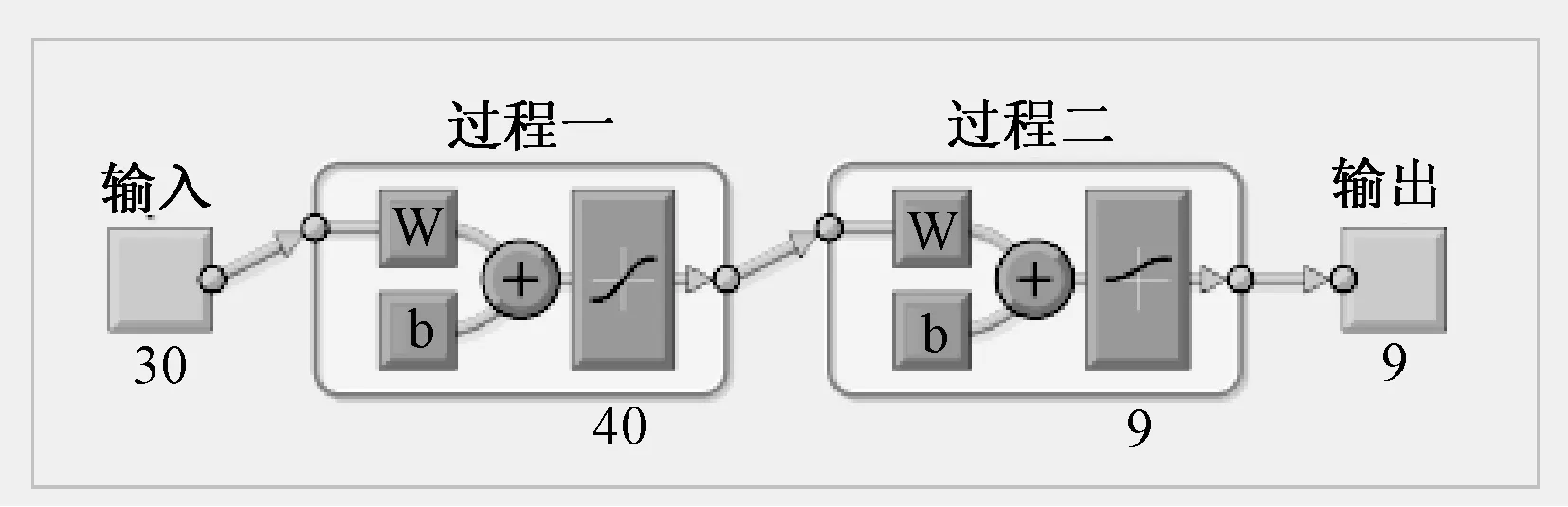
图7 BP神经网络程序模型图
将仿真机上得到的各故障工况下的故障论域特征向量9×30=270个参数作为训练样本对该BP神经网络程序进行训练。训练结果误差曲线如图8所示。
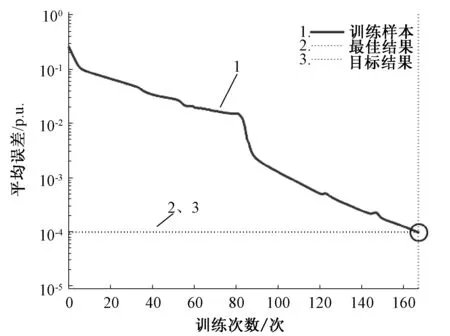
图8 训练结果误差曲线
可见在第167次训练后误差达到最小等于9.656 5×10-5,至此得到可用于凝汽器故障诊断的模型。
4.2.2 验证模型准确性
同线性相关度法的内容,依次代入3种故障状况下的故障征兆特征向量,结果如下。
(1)A4:B循环水泵跳闸故障
故障特征向量
X4=[1,1,1,0,0,0.5,0.5,0.5,0.5.0.5,1,0,1,1,1,0.5,
0.5,0.5,0.5,0,0,0.5,0.5,0.5,0.5,0.5,1,1,0.5,0.5];代入上述MATLAB程序中,得到如图9所示结果。
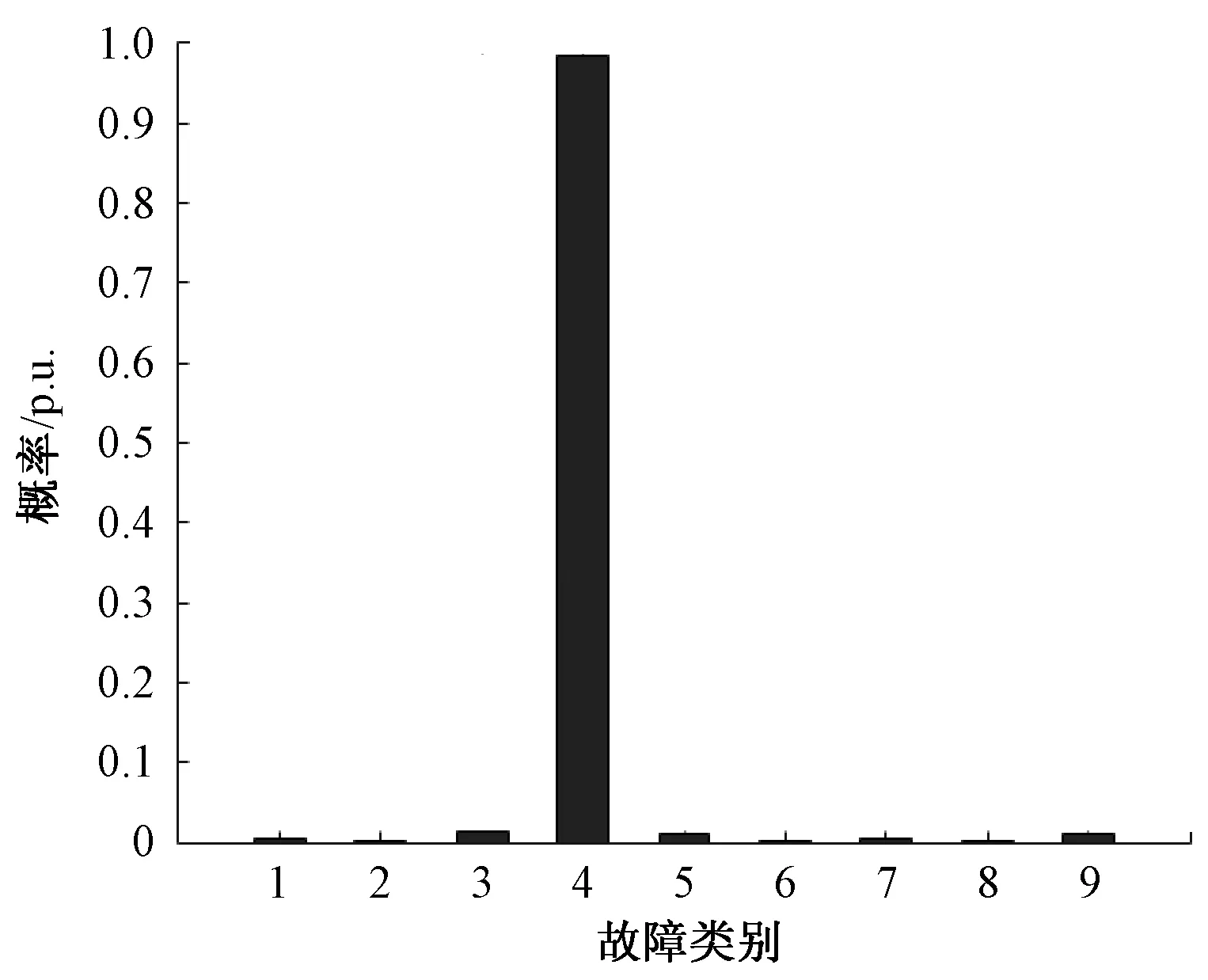
图9 A4故障特征向量对应诊断结果
从图9可以看出A4故障表现最明显,将图中9个故障对应的概率数值统计如表5所示。

表5 A4各故障发生概率
从表中可以看到,该模型诊断出A4发生的概率为98.29%,远高于其他8个故障的数量级,可以判断是A4故障发生,这与实际故障状况相符,诊断结果正确。
(2)A5:A真空泵跳闸且备用泵不联启
故障特征向量
X5=[1,1,0.5,0.5,0.5,0.5,0.5,0.5,0.5,0.5,0.5,1,0,0.5,0.5,0,0.5,0.5,0.5,0.5,0.5,0.5,0.5,0.5,0.5,0.5,1,0.5,0,0.5];代入MATLAB程序中,得到如图10所示结果。
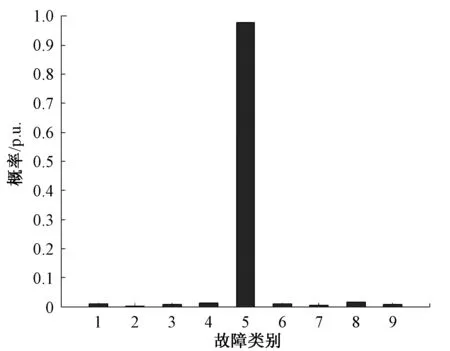
图10 A5故障特征向量对应诊断结果
从图10可以看出A5故障表现最明显,将上图中9个故障对应的概率数值统计如表6所示。
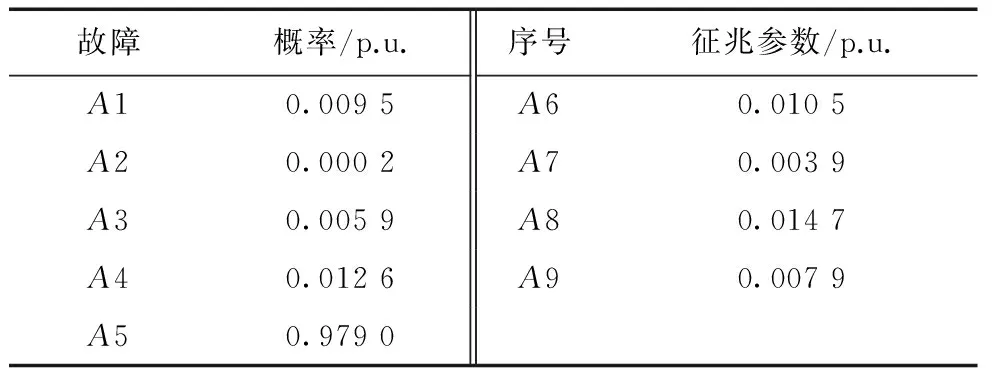
表6 A5各故障发生概率
从表中可以看到该模型诊断出A5发生的概率为97.9%,远高于其他8个故障的数量级,可以判断是A5故障发生,这与实际故障状况相符,诊断结果正确。
(3)A4、A5故障同时发生
故障特征向量
X45=[1,1,1,0,0,0.5,0.5,0.5,0.5,0.5,1,0.5,0.5,1,1,0, 0.5,0.5,0.5,0,0,0.5,0.5,0.5,0.5,0.5,1,1,0,0.5];代入MATLAB程序中,得到如图11所示结果。
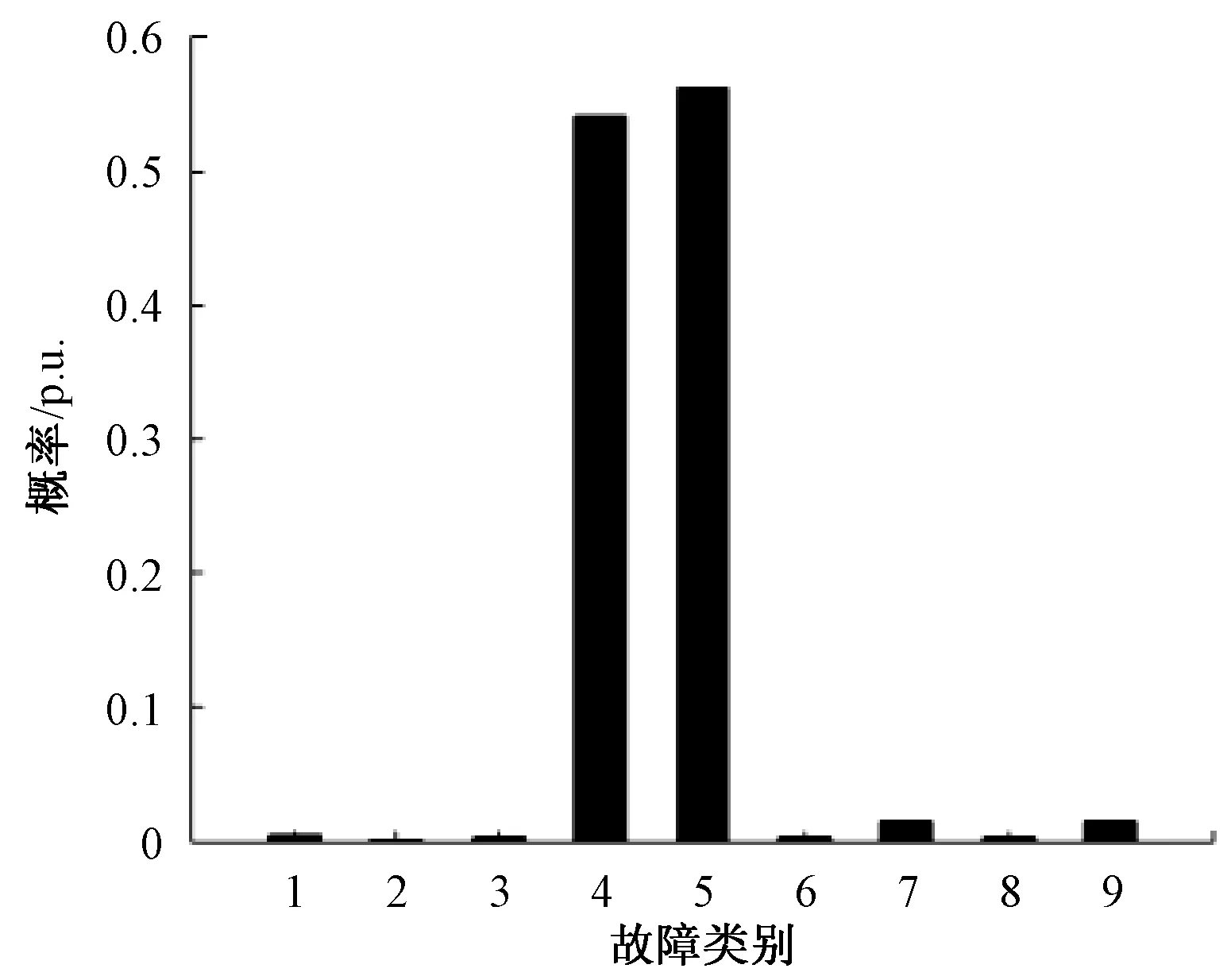
图11 A4、A5故障特征向量对应诊断结果
从图11可以看出A4、A5两个故障表现最明显,将上图中9个故障对应的概率数值统计如表7所示。
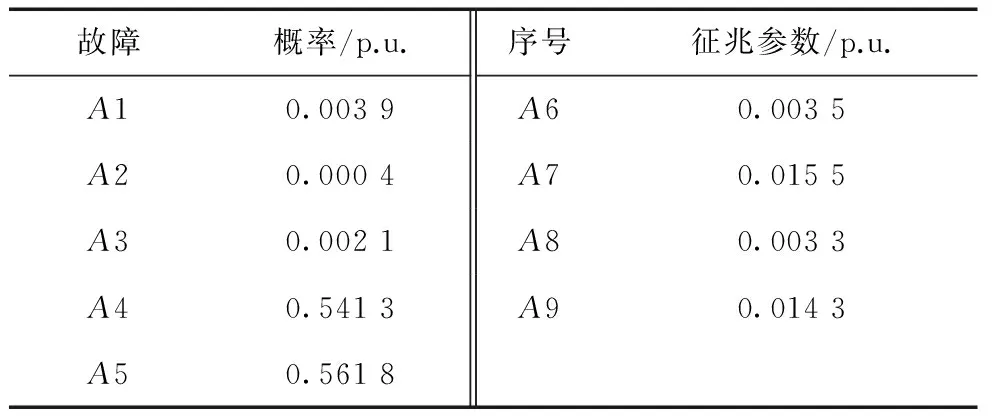
表7 A4、A5各故障发生概率
从表8中可以看出诊断结果中,A4和A5故障发生概率均高于50%,且远高于其他7个故障发生的概率。诊断结果为A4、A5故障发生,这与实际仿真机故障插入情况相符合,诊断结果正确。
4.2.3 随机验证模型准确性
为了检测上述两个故障同时发生的诊断结果的偶然性,额外随机选取两个故障进行二次验证如下,取A1、A6故障同时发生,该工况下故障特征向量:
X16=[1,1,0.5,0.5,0.5,0,0,0,0,0,0,1,0.5,0.5,0.5,0.5,0,1,1,0.5,0.5,0,0,0,1,1,0.5,1,0.5,0];代入MATLAB程序中,得到如图12所示结果。
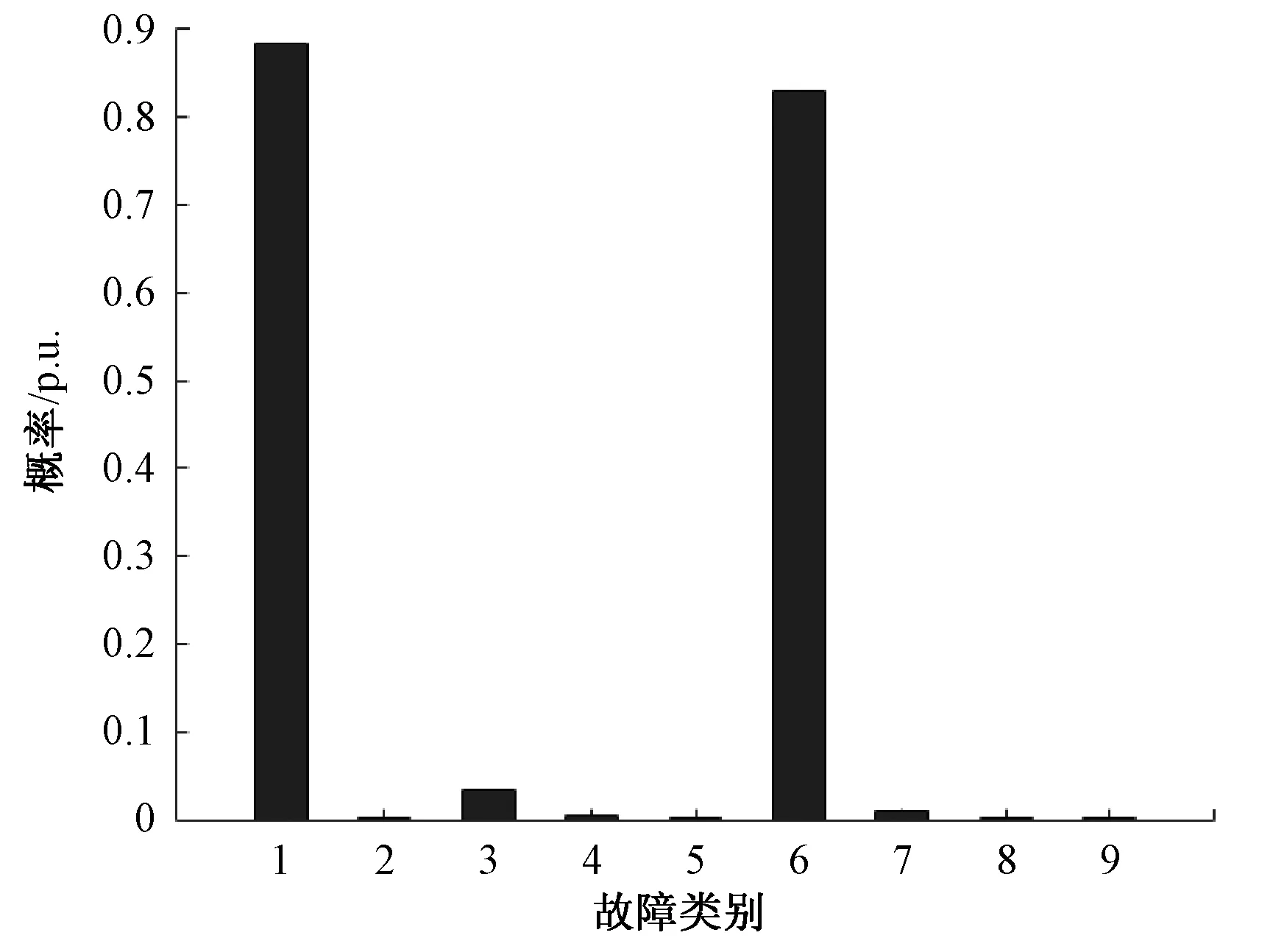
图12 A1、A6故障特征向量对应诊断结果
从图12可以看出A1、A6两个故障表现最明显,将上图中9个故障对应的概率数值统计如表9所示。
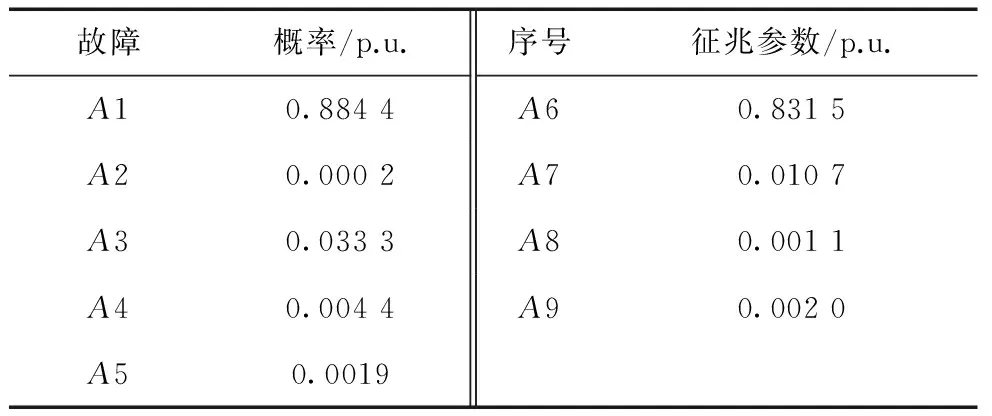
表8 A1、A6各故障发生概率
从表8中可以看出诊断结果中,A1和A6故障发生概率最高,均高于80%,且远高于其他7个故障发生的概率。故可认定诊断结果为A1、A6故障发生,这与实际仿真机故障插入情况相符合,诊断结果正确。
该工况下的诊断结果也表明,之前能诊断出A4、A5故障同时发生并非其偶然性。
从以上3个故障工况的诊断结果可以看出,在1 000 MW机组仿真机下,该BP神经网络可以快速准确地诊断出单个故障发生或多个故障同时发生。同时诊断结果的区分度很高,诊断出的故障与其他的故障发生概率相差几个数量级,可以准确判断是哪个故障发生。
4.3 BP神经网络法优缺点分析
相比线性相关度法,BP神经网络法的结果令人满意,该方法不仅能够准确快速诊断出单个故障,而且在多故障并发的情况下同样表现出色。单从诊断结果的数据来看,BP神经网络法得到的故障区分度很高,相差一个甚至几个数量级,完全可以确定是哪个故障发生,体现出了BP神经网络法在故障领域的优越性。
但是BP神经网络法的精确度很大一部分要归功于数据量。理论来讲,提供给神经网络训练的数据量越大,该方法最终诊断出的结果越准确。故而想要得到较精确的数据,需要大量的训练样本支持。
另外,在进行诊断的过程中,该方法也暴露出一定问题,如BPNN法程序开始时赋予的初始化权值及阈值是随机的,而且训练终止时的误差也不完全相同,因为每次初始化网络时都是随机的,训练后的权植和阈值也不完全相同(大致是一样的),所以每次训练后的结果也略有不同,在进行故障诊断时,容易陷入局部极小值,最终可能导致多次诊断同一故障时得到的结果不一致,甚至出现诊断出错的情况。需要多次进行尝试,并在得到合适的结果时,在程序中固定初始权值并保存网络。
5 结论
本文主要讨论了凝汽器故障诊断在电力工业生产过程中的重要性,并针对如何判断真空发生故障和真空发生故障时如何诊断出发生何种故障进行了重点研究。
(1)确定真空故障判断基准。由于直接判断真空法在实际生产中的便利性及直观性,本次设计中采用了直接判断真空法。该方法的核心思想是确定真空应达值,通过对比实际真空值与应达值的方法来判断真空是否发生故障。
(2)确定真空应达值。本文未采用传统的计算真空应达值的方法,而是在仿真机上进行数据采集,用M值来表征凝汽器的运行工况,通过大量的数据来支撑得到Pc-M的拟合曲线,而这条拟合曲线上的点就表示各工况下的背压应达值。
(3)Pc-M可用于真空故障判断。9个故障工况下的数据表明,在本次设计中拟合曲线的最大拟合偏差仍小于故障发生时最小的背压值变化偏差,当阈值取值δ=0.5%时,该模型可以诊断出真空故障。
(4)线性相关度法:线性相关度法通过计算各故障的线性相关度来判断故障。该方法在单个故障诊断时诊断结果受量化值取值影响较大,且在本次设计的量化取值下诊断结果区分度很小,难以确定某一故障是否发生。在多故障并发工况下无法准确诊断出所有故障,且该方法诊断故障费时费力,效率很低。
(5)BP神经网络法:BP神经网络法首先对BP神经网络MATLAB程序进行训练,之后再故障诊断。实验验证结果表明,BP神经网络法相比线性相关度法无论是速度还是精度都有明显的优势。另外,BP神经网络法在多故障诊断中也具有可行性。该方法能够准确诊断出多故障工况下的所有故障。
[1] 张艳萍.用于故障诊断的凝汽器真空模型研究[D].北京:华北电力大学, 2009.
[2] 李季,严东超.BP神经网络改进算法在电气故障诊断系统中的应用[J]. 电力科学与工程, 2005,21(1):69-72.
[3] 王彪,刘格.基于BP神经网络的直接空冷凝汽器背压预测[J]. 电力科学与工程,2014,30(5):67-70.
[4] 司丽丽,陈荣生,滕丕忠,等.电站凝汽器运行状态监测智能决策系统研究[J].能源研究与信息,2007, 23(2):96-99.
[5] 陈林霄,王惠杰,杨新健.基于改进型BP神经网络的火电机组初压优化[J].节能,2013,32(11):53-56.
[6] 丁常富,王亮.基于交叉验证法的BP神经网络在汽轮机故障诊断中的应用[J].电力科学与工程,2008, 24(3):31-34.
[7] 侯炜,田沛,徐桂成,等. D-S证据理论在凝汽器故障诊断中的应用[J].电力科学与工程,2003,19(4):65-67.
[8] 张建华,侯国莲,张巍,等. 一种基于模糊规则和遗传算法的凝汽器故障诊断方法的研究[J].中国电机工程学报,2004,24(4):205-209.
[9] 孙晓刚,张建华,侯国莲,等. 基于概率神经网络的凝汽器故障诊断研究[J].现代电力,2005, 22(3):58-61.
[10] 于伟锋,陈鸿伟.基于试验和BP神经网络的CFB锅炉脱硫效率研究[J].电力科学与工程,2013, 29(8):50-56.
[11] 罗韶辉,高锦尧,张连涛.宁海电厂二期1000MW超超临界机组启停机优化[C].长三角电机、电力科技分论坛. 2011.
[12] 宫唤春.基于模糊支持向量机的凝汽器故障诊断[J]. 热力发电, 2015(6):98-101.
[13] 张新海,雷勇.BP神经网络在机械故障诊断中的应用[J]. 噪声与振动控制. 2008,28(5): 95-97.
[14] AJAMI ALI, DANESHVAR MAHDI. Independent component analysis approach for fault diagnosis of condenser system in thermal power plant[J]. Journal of Central South University, 2014, 21(1):242-251.
[15] 高建强,马亚,钟锡镇,等. 基于遗传神经网络的直接空冷凝汽器故障诊断研究[J]. 华北电力大学学报(自然科学版),2013,40(3):69-73.
[16] 王运民,吴艳,夏成锐,等. 火电厂小汽轮机排汽连接方式的改进与定量分析[J]. 电力科学与技术学报, 2015, 30(4):131-135.
[17] 向敏,何川,田力,等. 基于模糊神经网络的配电网无线通信系统性能评估方法[J]. 电力科学与技术学报, 2016, 31(2):64-71.
作者简介:罗 宁 (1994-),男,硕士研究生,研究方向为电站设备故障诊断与状态监测、压缩空气储能技术等。
Research on Vacuum Fault Diagnosis of Condenserin Thermal Power Unit
LUO Ning, HE Qing
(School of Energy Power and Mechanical Engineering, North China Electric Power University, Beijing 102206, China )
According to the simulation machine to do condenser fault diagnosis.Choosing the appropriate fault judgment benchmarks to judge whether thevacuum of condenser failed. Firstly we established the Pc-M model to judge the vacuum value, and secondly the Pc-M model was used to judge the vacuum. When the threshold was 0.5%,the vacuum failure can be diagnosed. Finally the linear correlation method and the BP neural network method were used to diagnose the single fault condition and the multi-fault concurrency conditions. The final results showed that the BP neural network method was better than the linear correlation method and has obvious advantages both the speed and accuracy, and the same exact is accurate in the case of multiple failures.
condenser; fault diagnosis; vacuum target value; linear correlation; BP neural network(BPNN)
虞斌(1965-),男,教授,主要从事高效传热传质环保设备的研究。
10.3969/j.ISSN.1672-0792.2017.05.014
2017-03-16。
国家自然科学基金资助项目(51276059)。
TK264
A
1672-0792(2017)05-0070-09
猜你喜欢
江苏安全生产(2023年11期)2023-12-14 12:05:26
真空与低温(2022年6期)2023-01-06 07:33:20
设备管理与维修(2022年21期)2022-12-28 07:34:32
九江职业技术学院学报(2022年1期)2022-12-02 09:46:54
水泵技术(2022年2期)2022-06-16 07:08:18
保定学院学报(2022年2期)2022-04-07 02:26:50
许昌学院学报(2018年4期)2018-05-02 12:27:37
中华建设(2017年1期)2017-06-07 02:56:14
电站辅机(2016年3期)2016-05-17 03:52:29
橡胶工业(2015年6期)2015-07-29 09:20:34