柔性直流接入电磁环网的相轨迹暂稳控制研究
2017-06-19 14:56马覃峰瞿艳霞时伯年
东北电力大学学报 2017年3期
林 成,马覃峰,瞿艳霞,时伯年,康 鹏,孙 斌
(1.贵州电网有限责任公司 电力调度控制中心,贵州 贵阳550002;2.北京四方继保自动化股份有限公司,北京100085)
柔性直流接入电磁环网的相轨迹暂稳控制研究
林 成1,马覃峰1,瞿艳霞2,时伯年2,康 鹏1,孙 斌1
(1.贵州电网有限责任公司 电力调度控制中心,贵州 贵阳550002;2.北京四方继保自动化股份有限公司,北京100085)
柔性直流输电(柔直)技术采用了全控型电力电子器件,具有快速潮流控制、动态无功支撑、多端口协调运行、防止故障范围扩大等多方面优势,将其应用于电磁环网能够提高电网运行的安全性、可靠性、稳定性和经济性,具有良好的应用前景和推广价值,是解决电磁环网问题的新的、有效的手段。重点研究柔性直流应用于电磁环网基于广域信息的暂态稳定协调控制技术。首先对基于相平面(Δω-δ)轨迹凹凸性的暂态失稳判别原理及最小切机量计算进行了介绍,进而提出了柔直与稳控的协调控制技术方案,并讨论了协调控制总体框架及主站软件流程。电磁仿真验证结果表明:该技术方案可实现柔性直流应用于电磁环网的暂态稳定协调控制,可最大程度利用柔直容量对暂态过程中的系统进行有功及无功支撑,优化稳控措施量,保证柔直系统能够发挥有功的传输、电压的紧急支撑,避免控制原因导致的换流器过载致使柔性装置失效,保持电网稳定运行。
电磁环网;柔性直流(VSC-HVDC);暂态稳定;协调控制;相平面轨迹;凹凸性
在高电压等级网架建设初期会形成若干电磁环网。受供电可靠性、输电能力、特殊地理位置等条件制约某些电磁环网将不具备解环条件,一定程度上将影响电网安全稳定运行。电磁环网合环运行时,当高压线路因故障断开,大量潮流转移到低压侧线路上后,有功功率很可能超过其静态稳定极限,引起两侧系统间的功率振荡而失去稳定。
柔性直流技术具有功率独立控制、动态无功补偿、不会发生换相失败且具备快速响应能力等多方面优势。文献[1]指出,舟山电网柔性直流的动态功率支撑特点使得在系统遭受扰动时舟山电厂功角摆幅有所减小。本文主要研究柔直与电磁环网并联连接区域电网与主网的场景下,暂态稳定问题中柔直的控制手段。目前,电磁环网存在的暂态稳定问题主要依靠稳控措施解决[2]。传统的暂态稳定控制策略制定基于预想事故集,通过对电力系统离线仿真分析获得,而仿真模型和参数不可避免的存在一些偏差,从而影响计算精度。同时事故后由稳控措施切除整个的负荷和机组,导致执行措施量不连续,易引起欠切或过切,代价较大。因此,研究基于响应的电力系统暂态稳定分析方法实时分配柔直与稳控的协调控制措施,实现事故后措施量的连续控制,将更有力的发挥柔性直流接入电磁环网的作用。
本文提出了暂稳控制中柔直与稳控系统的协调总体实施方案。结合PMU提供的包括发电机功角量、转速量在内的广域同步信息,依据系统相轨迹的几何特征,通过基于相平面(△w-δ平面)轨迹凹凸性的暂态失稳判别轨迹预测并计算暂稳总控制量,分配柔直与稳控执行措施量,仿真结果验证该技术方案使用可靠性高,具有广泛的工程应用前景。
1 柔直的控制特性及接入电磁环网的接线方式
柔直换流站在交流电网侧相当于一个幅值和相角可控的交流电压源,可同时对有功和无功类电气量进行完全独立的解耦控制。柔直可以瞬时地在PQ平面4象限实现有功及无功功率的独立控制[3]。

图1 送端换流站控制器

图2 受端换流站控制器

(a)并联方式;(b)串联方式图3 电磁环网中柔直接入的两种接线方式
交直流并联运行时,此时柔直换流器控制方式称为正常控制方式。正常控制方式运行时,柔直送端采用定有功控制方式。为了尽量利用原电磁环网高压侧输电通道的输电能力,可将潮流控制尽量分布到交流侧,送端换流站有功及无功的参考值根据实际情况尽量低,具体控制策略如图1所示。
此外,为了维持柔直系统有功功率和直流电压的稳定,两端换流站必须有一个采用定直流电压控制,因此受端换流站通常采用定直流电压控制方式,具体控制策略如图2所示。
图1、图2中,P、Pref分别为直流输送有功功率的测量值和参考值;Udc、Udcref分别为直流输电线路的直流电压测量值和参考值;Q、Qref分别为换流站与交流系统交换的无功功率的测量值和参考值。将测量值与参考值进行比较之后,通过控制环得到内环电流控制器的输入值Ud、Uq并送到内环电流控制器进行控制。柔直具备的上述特性,使得其可被视为无转动惯量的发电机或电动机,起到了静止无功补偿器的作用。柔直的有功与无功功率输出响应时间通常在毫秒量级。其快速响应能力使得柔直装置能够在故障后的第一摆时间内提供功率支撑,有利于增强第一摆的稳定,可延缓发电机加速过程、提升电网暂稳功角稳定性。利用动态无功补偿快速响应的特点,可有效缓解局部地区无功不足的问题,在故障状态下提供充裕的无功支撑,提升系统暂态电压稳水平。
工程应用中,柔直接入电磁环网有两种接线方式,如图3所示。若采用柔直与电磁环网低压侧线路串联方式,则相当于将电磁环网低压侧解环,柔直使故障后两侧电网隔离而形成孤网,正常运行时可解决电磁环网母线短路电流较大、保护难于整定等问题。由于柔直建设成本和设备成本较高,通常其容量选择将远低于交流线路输送的容量,因柔直没有过负荷能力,故障孤网后功率缺额较大,稳控措施可能比传统电磁环网更严重。因此,受特殊地理条件限制,如电磁环网高压侧线路地处山火、泥石流等自然灾害频发区域,高压侧发生故障概率较大,不建议采用柔直串联接入,另外短路电流问题不严重,且负荷重要性级别较高的地区,通常采用柔直并联接入电磁环网方式。本文主要研究柔直并联接入电磁环网的接线方式下,电磁环网高压侧故障而出现暂稳问题时,如何最大限度利用柔直为系统提供有功支援并优化稳控措施量。
2 基于相轨迹的柔直暂稳控制研究
通过并联方式将柔直接入电磁环网时,当电磁环网高压侧双回线路发生N-2故障中断后,通过合理利用柔直的有功控制能力,使柔直分担交流线路的一部分功率,可适当减少稳控切机或切负荷的控制量,同时缓解潮流转移导致的暂稳问题。
2.1 暂稳控制中稳控系统与柔直系统的协调总体实施方案
文献[4-7]研究了基于广域数据的轨迹信息的电力系统暂态不稳定性判别与控制的原理和技术,本文基于现有的广域监测系统的条件,通过广域数据实时计算分配柔直与稳控的措施量,优化稳控措施,增加系统可控性,提高系统电能质量,提升输送容量,提出了电力系统暂态稳定性闭环控制系统的实现方案。

图4 协调控制总体框架图

图5 控制主站软件流程图
基于广域信息的柔直与稳控暂态稳定协调控制系统采用集中决策及分散执行的控制架构,其主要硬件组成为:测量PMU、发电厂稳控执行站、柔直控制执行站、高速通信网络及高精度GPS对时,如图4所示。控制主站通过高速通信网络将PMU测得的同步功率、角速度和功角数据,以及柔性直流控制执行站计算得到的当前柔性直流控制有功、无功,加上稳控执行站上送的可切机组排序等控制参数汇集起来,作为大扰动检测启动后系统不稳定性判别与控制决策的依据,需要完成分群、等值计算、等值轨迹预测,暂态稳定总体措施量计算及分配稳控具体切机措施及柔直控制措量。各发电厂及主要变电站的PMU上送各发电机电磁功率、角速度、主要联络线功率及功角信息。稳控执行站上送可切机组及优先级排序并接受且执行控制主站送来的切机命令。柔性直流控制子站实时上送柔直有功、无功等参考值并接受且执行控制主站送来的调控柔直命令。
控制主站暂态稳定柔直与稳控暂态稳定协调控制功能的软件实现框架,如图5 所示,其主要由实时的信息采集、故障判别、不稳定预测及暂稳措施量计算、柔直及稳控措施分配及执行模块组成。
控制主站从广域实时信息中得到各发电机的动态轨迹信息、联络线功率及运行状态信息,当判断电磁环网高压侧发生短路或无故障跳闸后导致高压侧输电通道中断,进入暂态稳定性判别模块。利用实测轨迹凹凸性方法判别系统的稳定性,并根据实测信息计算等值功率平衡点的近似计算方法得到暂稳总控制措施量。得到暂稳总控制措施量后,结合柔直当前调控能力,分配稳控执行站和柔直执行站措施量并下发执行,最后返回相轨迹凹凸性判别,直至互联电网恢复稳定。
2.2 基于相平面轨迹凹凸性的暂态失稳总控制量计算方法
广域监测系统技术的发展,为采集电力系统发电机实时响应轨迹提供可能。用相平面的轨迹凹凸性几何特征判别电力系统暂态不稳定的基础是:对单机无穷大系统的理论研究表明,在相平面中,稳定的轨迹会回摆,而不稳定的轨迹则会发散[8]。采用相轨迹判别暂态不稳定:
发电机的暂态微分方程:
(1)
式中:δ为发电机功角;ω0为同步电角速度;M为发电机转动惯量;Pm为机械功率;Pemax为电磁功率峰值。
相轨迹的斜率为

(2)
若相轨迹斜率曲线在区间I上二阶可导,对相轨迹的二阶求导,若其二阶可导数>0(<0),则称相轨迹在区间I上是严格凸(凹)的。相轨迹的拐点为

(3)
拐点曲线可以表示为

(4)
为提高相平面轨迹凹凸性判据对多机系统的适应性,文献[9]对多机系统进行分群聚合并等值为单机系统后,为表征拐点曲线附近轨迹方向场,提出一个表示该曲线上功角与角加速度的二阶导数关系的辅助指标r,其表达式如下:

(5)
对于多机系统不稳定的综合判据为
τ=lΔω>0且μ=rΔω>0 .
(6)
随着暂态过程的进展,自记忆预测用最新的实时数据可以滚动预测未来约0.4 s的功角及角速度轨迹,使用预测轨迹判别暂态不稳定。文献[10]仿真验证了该预测暂态不稳定后启动控制的准确性和快速性。
文献[11]提出了一种基于切机时刻相轨迹斜率和功率平衡点角度的最小切机量近似计算方法.对于实际的多机系统,将其等值为超前群S与滞后群A两群,可以得到式(6)计算超前群S所需要的切机量:

(7)
其中:Pms和Pes分别为超前群S在切机时刻的等值机械功率和电磁功率,M为系统所有机组的总惯量,MT为等值单机系统的惯量,Ms和Ma分别为超前群S和滞后群A的总惯量,Δω为等值单机系统在切机时刻的角速度偏差。
2.3 暂稳总措施分配方法及柔性直流附加控制

再用文献[12]的方法根据发电机的功角、角速度和惯性信息,预选实施切机的实际切机量。在切机量求解过程当中,通常将求取出来的切机量ΔPm-Pmax作为连续变量处理。实际上,在切机措施实施时通常是将整台发电机切除,因此实际的切机量是一个离散变量。工程实际应用中,安全稳定控制装置可以实时将系统中具备切机敏感性的可切机组进行组合排序,得到一组离散的数组,根据ΔPm-Pmax得知选择满足最小过切原则的一组机组切机。
假定与系统中的可切除机组有n台,选切机组表达式及约束条件可用如下形式描述:

(8)
其中:yi为1表示该机组保留,yi为0则表示该机组被切除;Wi表示该机组故障前功率,因此必然存在一个过切量x0,使得实际选定的机组组合切机量最接近ΔPm-Pmax,ΔPm-Pmax+x0即为稳控实际切机量。

柔直附加控制方案如下图6所示,柔性直流执行站收到有功参考值P_ref及Q_max后,通过站间通讯,由通讯光纤将P_ref及Q_max传输到定有功功率侧的换流站;定有功功率侧换流站接收到有功功率参考值信号P_ref后,通过外环PI环节生成正序d轴有功电流参考值id_ref,作为附加有功控制信号传输到内环控制器。
定有功功率侧换流站收到无功限幅Q_max后,计算iq的限幅,其中ud为直流电压额定值:

(9)
在三相电网电压平衡的条件下,以电网额定电压u0为参考值,通过外环PI环节计算并经iq限幅后生成正序q轴无功电流参考值iq_ref,作为附加无功控制信号传输到内环控制器;
外环控制参考值id_ref和iq_ref经内环控制器处理后,输出脉冲控制。
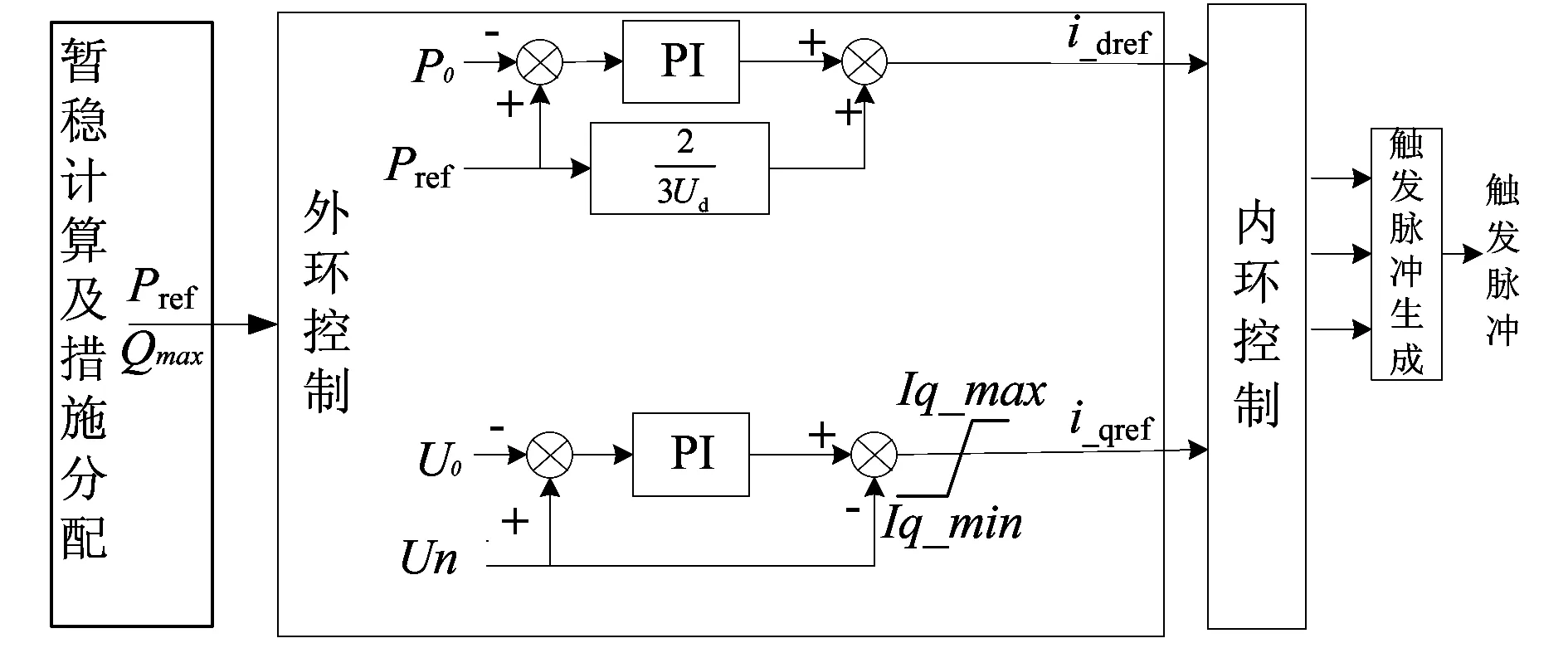
图6 柔直附加控制方案
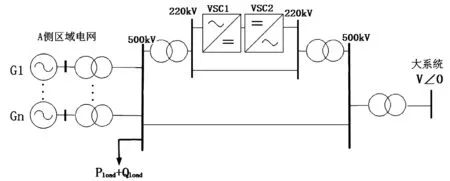
图7 柔直并联接入电磁环网简化图

图8 三种情况相轨迹对比曲线
在换流器额定容量一定的情况下,有功限幅减小,则可增大无功限幅,意味着将增强柔直对交流系统电压的调节能力,为电网提供更有力的动态电压支撑。柔直的交流电压调节时间跟控制器参数及系统参数有关,实测工程电压无功调节耗时一般在100 ms内。100 ms完成电压调节后,若此时实际无功消耗小于事先设定的无功限幅,则可降低无功限幅。与此同时有功限幅可以升高。整个过程尽可能利用柔直容量增加减少稳控的切机量,使柔直的连续控制为稳控的离散控制作补充,又参与电压调节,最大限度地在柔直换流器不过载的情况下发挥其稳定作用。
3 仿真验证
3.1 算例说明
为了验证本文所提出的柔直控制器与安全稳定控制措施协调控制的可行性和有效性,利用电力系统分析软件工具PSCAD对柔直进行仿真建模。仿真所采用的系统参数为某工程实际参数,柔直系统额定直流电压为±204 kV,换流器采用基于模块化多电平换流器技术,换流器额定容量300 MVA,正常运行时设定柔直分担电磁环网的有功功率100 MW,且不与系统交换无功功率。柔直可采用与电磁环网的220 kV侧线路并联接线方式,如图7所示。
3.2 算例仿真
A侧区域电网为大电源区域,通过电磁环网向系统输送功率,500 kV和220 kV的两个电压等级的并联线路重载运行。当电磁环网高压侧线路双回线N-2故障之后,不采取柔直及稳控措施情况下,500 kV线路潮流转移到220 kV会导致系统暂态失稳。
暂态失稳后,采集PMU数据利用相轨迹预判并计算得到暂稳总控制量为840 MW,对以下三种情况进行试验分析:系统暂态失稳后不采取任何措施;暂态失稳后100 ms仅通过稳控切除A侧区域3台280 MW机组;暂态失稳后100 ms稳控切除2台280 MW机组,柔性直流100 ms提升270MW有功,100 ms提供50 MVar无功。三种情况仿真结果分别对应:系统失稳、系统临界稳定、系统稳定,其相轨迹曲线对比如图8所示,因此,利用相轨迹方法计算总措施量,分配给柔直与稳控协调控制,可以有效减少稳控措施量,同时提升系统稳定性。
4 结 语
本文基于相平面(Δω-δ)轨迹凹凸性的暂态失稳判别原理,通过轨迹预测预判失稳并给出暂态稳定整体措施量,结合柔直四象限快速调节控制、无过载能力的特点,实时分配稳控与柔直措施量。实现电磁环网中柔性直流与传统稳控系统的协调控制,可减少稳控切机、切负荷措施量以及提高系统电压水平,可最大程度利用柔直容量对暂态过程中的系统进行有功及无功支撑,避免控制原因导致的换流器过载致使柔性装置失效,保证电网系统稳定,提高系统控制灵活性,实现电网可靠供电,具有一定的工程应用意义。
[1] 李敏,顾益磊,宋春燕,等.含柔性直流输电系统的舟山海岛电网安全稳定分析[J].华东电力,2014,42(1):87-91.
[2] 林成,马覃峰,瞿艳霞,等.应用于电磁环网的柔性直流输电系统与稳定控制措施的协调控制[J].电力建设,2016,37(10):80-85.
[3] 姚为正,邓祥纯,易映萍,等.基于dq0同步坐标的柔性直流输电控制策略及仿真研究[J].电力系统保护与控制,2009,37(22):71-76.
[4] 赵晋泉,邓晖,吴小辰,等.基于广域响应的电力系统暂态稳定控制技术评述[J].电力系统保护与控制,2016,44(5):1-9.
[5] 刘曦,姜明磊.基于WAMS的电力系统恢复分区方法[J].东北电力大学学报,2013,33(1/2):20-26.
[6] 张健,李国庆,冀瑞芳.基于改进免疫算法的PMU多目标优化配置[J].东北电力大学学报,2011,31(4):38-42.
[7] 谢欢,张保会,李钢,等.基于广域发电机状态信息的电力系统暂态不稳定性实时预测[J].电力自动化设备,2009,29(7):28-32.
[8] 张保会,杨松浩,王怀远,等.电力系统暂态稳定性闭环控制(一)—简单电力系统暂态不稳定判别原理[J].电力自动化设备,2014,34(8):1-6.
[9] 张保会,杨松浩,王怀远,等.电力系统暂态稳定性闭环控制(二)—多机电力系统暂态不稳定判别方法[J].电力自动化设备,2014,34(9):1-6.
[10] 张保会,杨松浩,王怀远,等.电力系统暂态稳定性闭环控制(三)—基于预测响应的暂态不稳定闭环控制启动判据[J].电力自动化设备,2014,34(10):1-6.
[11] 张保会,杨松浩,王怀远,等.电力系统暂态稳定性闭环控制(五)—控制量的实时计算[J].电力自动化设备,2014,34(12):1-6.
[12] 张保会,杨松浩,王怀远,等.电力系统暂态稳定性闭环控制(六)—控制地点的选择[J].电力自动化设备,2015,35(1):1-6.
Research on Phase Trajectory Transient Stability Control of VSC-HVDC Link Electromagnetic Loop Network
Lin Cheng1,Ma Qinfeng1,Qu yanxia2,Shi Bonian2,Kang Peng1,Sun Bin1
(1.Power Dispatching Control Center of Guizhou Power Grid Co.,ltd,Guiyang Guizhou 550002;2.Beijing Sifang Automation Co.,ltd,Beijing 100085)
VSC-HVDC(VSC) technology uses full controlled power electronic devices,with fast flow control,dynamic reactive power support,multi port coordination operation,to prevent the failure to expand the scope and many other advantages,its application in the electromagnetic loop network can improve the operation of the safety,reliability,stability and economy,has good application prospect and popularization value,is a new and effective means to solve the problem of electromagnetic loop network.This paper focuses on the study of the transient stability and coordination control technology of VSC system based on wide area information.Firstly,based on the phase plane transient concavity trajectory instability and the minimum amount of the principle of distinguishing cutting machine are introduced,and then put forward the VSC and stability control of coordinated control scheme,and discussed the coordination control framework and the main software flow.The simulation results show that the technology of transient stability coordination control scheme can realize VSC applied to the electromagnetic loop network,to maximize the use of direct soft capacity of the system in the transient process of active power and reactive power support,optimizing the stability control measures,to ensure the emergency support system can play VSC transmission,the active voltage and to avoid converter overload resulting in VSC device failure control,maintain stable operation of power grid.
Electromagnetic loop network;MMC based HVDC;Transient stability;Coordinated control;Phase plane trajectory;Concave and convex
2017-02-20
林 成(1975-),男,高级工程师,主要研究方向:电力系统分析、运行与控制.
1005-2992(2017)03-0019-07
TM712
A
电子邮箱: lincheng@gz.csg.cn(林成);cnmaqf@gz.csg.cn(马覃峰);quyanxia@sf-auto.com(瞿艳霞);shibonian@sf-auto.com(时伯年);kangpeng@gz.csg.cn(康鹏);sunbin@gz.csg.cn(孙斌)
猜你喜欢
电力系统自动化(2021年9期)2021-05-07
哈尔滨铁道科技(2020年3期)2021-01-18
石材(2020年7期)2020-08-24
中国交通信息化(2018年12期)2018-03-21
中国交通信息化(2017年11期)2017-06-06
电网与清洁能源(2015年5期)2015-12-29
四川电力技术(2015年5期)2015-12-19
智能建筑电气技术(2015年5期)2015-12-10
电测与仪表(2015年2期)2015-04-09
航天返回与遥感(2014年1期)2014-07-31